Область техники
Настоящее изобретение относится к устройству определения детонации и способу определения детонации для двигателя внутреннего сгорания, и в частности к методике определения, возникла детонация или нет, на основе формы волны вибрации двигателя внутреннего сгорания.
Предшествующий уровень техники
Предложены различные способы для детектирования детонации (детонационного стука), возникающей в двигателе внутреннего сгорания. Например, методика определяет, что детонация возникла, когда величина вибрации двигателя внутреннего сгорания больше порогового значения. Однако существует случай, где величина шума, например вибрации, которая возникает, когда закрывается впускной клапан или выпускной клапан, например больше порогового значения, несмотря на то, что детонация не возникла. В этом случае, хотя детонация не возникла, можно было бы ошибочно определить, что детонация возникла. Соответственно, предложена методика, которая определяет, возникла детонация или нет, на основе формы волны вибрации, чтобы учитывать характеристики, отличные от величины, например угол поворота кривошипа, при котором возникает вибрация, и коэффициент демпфирования.
Выкладка патента Японии № 2005-330954 раскрывает устройство определения детонации для двигателя внутреннего сгорания, которое использует форму волны вибрации, чтобы точно определить, возникла или нет детонация. Устройство определения детонации, раскрытое в выкладке патента Японии № 2005-330954, включает в себя блок детектирования угла поворота кривошипа для детектирования угла поворота кривошипа двигателя внутреннего сгорания, блок детектирования вибрации для детектирования значения, относящегося к величине вибрации двигателя внутреннего сгорания, блок детектирования формы волны для детектирования формы волны вибрации двигателя внутреннего сгорания в заранее определенном диапазоне угла поворота кривошипа на основе значения, определенного путем деления значения, относящегося к величине вибрации, на максимальное из детектированных значений, относящихся к величине вибрации, блок памяти для сохранения заранее формы волны вибрации двигателя внутреннего сгорания, и блок определения для определения, возникла или нет детонация в двигателе внутреннего сгорания, на основе результата сравнения между детектированной формой волны и сохраненной формой волны. Блок определения определяет, возникла или нет детонация, на основе значения, представляющего отклонение детектированной формы волны от сохраненной формы волны. Значение, представляющее отклонение, вычисляется путем деления суммы разностей, каждая из которых является разностью между величиной на детектированной форме волны и величиной на сохраненной форме волны, определенной для каждого угла поворота кривошипа, на значение, определенное путем интегрирования величины на сохраненной форме волны по углу поворота кривошипа.
Касательно устройства определения детонации, раскрытого в вышеуказанной публикации, блок детектирования угла поворота кривошипа детектирует угол поворота кривошипа двигателя внутреннего сгорания, блок детектирования вибрации детектирует значение, относящееся к величине вибрации, блок детектирования формы волны детектирует форму волны вибрации двигателя внутреннего сгорания в заранее определенном диапазоне угла поворота кривошипа на основе значения, относящегося к величине (интенсивности) вибрации. Блок памяти заранее сохраняет форму волны вибрации двигателя внутреннего сгорания, а блок определения определяет, возникла детонация или нет в двигателе внутреннего сгорания, на основе результата сравнения между детектированной формой волны и сохраненной формой волны. Таким образом, модель формы ударной волны, которая является формой волны вибрации, когда происходит детонация, подготавливается с помощью, например, экспериментов или аналогичного и заранее сохраняется, и модель формы ударной волны и детектированная форма волны сравниваются друг с другом. Таким образом, можно определить, возникла или нет детонация. Соответственно, можно более подробно проанализировать, является ли или нет какая-либо вибрация двигателя вибрацией вследствие детонации. Следовательно, можно точно определить, возникла или нет детонация.
Однако устройство определения детонации, раскрытое в выкладке патента Японии № 2005-330954, детектирует форму волны, которая нормализуется путем деления значения, относящегося к величине вибрации, на ее максимальное значение. Поэтому, независимо от того, является ли детектированная величина большой или малой, максимальная величина на детектированной форме волны все время равна "1". Таким образом, даже если исходная величина перед делением на максимальное значение является малой, то значение, представляющее отклонение формы волны, вероятно, будет значением, которое выглядит как представляющее детонацию, если форма детектированной формы волны аналогична форме сохраненной формы волны. Это происходит по следующей причине. Значение, определенное путем интегрирования величины на сохраненной форме волны по углу поворота кривошипа, а именно площадь сохраненной формы волны, сравнительно больше разности между величиной на детектированной форме волны и величиной на сохраненной форме волны, и поэтому влияние разности в величине сравнительно небольшое. Тогда можно было бы ошибочно определить, что возникла детонация, несмотря на то, что детонация не возникла.
Раскрытие изобретения
Цель настоящего изобретения - предоставить устройство определения детонации и способ определения детонации для двигателя внутреннего сгорания, с помощью которого можно точно определить, возникла или нет детонация.
Согласно аспекту настоящего изобретения, устройство определения детонации для двигателя внутреннего сгорания включает в себя: датчик положения кривошипа, детектирующий угол поворота кривошипа двигателя внутреннего сгорания; датчик детонации, детектирующий величину вибрации двигателя внутреннего сгорания, причем величина связана с углом поворота кривошипа; и операционный блок. Операционный блок детектирует форму волны вибрации в первом интервале угла поворота кривошипа на основе величины вибрации двигателя внутреннего сгорания, вычисляет первое значение на основе разности между величиной на детектированной форме волны и величиной на модели формы волны, определенной заранее в качестве опорной формы волны вибрации двигателя внутреннего сгорания, во втором интервале угла поворота кривошипа, вычисляет второе значение такое, что второе значение меньше, когда количество оборотов выходного вала двигателя внутреннего сгорания меньше, вычисляет третье значение на основе первого значения и второго значения и определяет, возникла или нет детонация в двигателе внутреннего сгорания, на основе третьего значения.
С помощью вышеописанной конфигурации детектируется угол поворота кривошипа двигателя внутреннего сгорания. Величина вибрации двигателя внутреннего сгорания детектируется совместно с углом поворота кривошипа. На основе величины детектируется форма волны вибрации в первом интервале угла поворота кривошипа. Первое значение вычисляется на основе разности между величиной на детектированной форме волны и величиной на модели формы волны, определенной заранее в качестве опорной формы волны вибрации двигателя внутреннего сгорания, во втором интервале угла поворота кривошипа. Соответственно, может быть получено первое значение, которое меняется в зависимости от разности между соответствующими величинами на детектированной форме волны и модели формы волны. Далее вычисляется второе значение такое, что второе значение меньше, когда количество оборотов выходного вала двигателя внутреннего сгорания меньше. На основе первого значения и второго значения вычисляется третье значение. Соответственно, в случае, где количество оборотов выходного вала двигателя внутреннего сгорания сравнительно небольшое, влияние второго значения может быть уменьшено по сравнению со случаем, где количество оборотов сравнительно большое. Поэтому в случае, где количество оборотов выходного вала двигателя внутреннего сгорания сравнительно небольшое, влияние первого значения может быть относительно увеличено по сравнению со случаем, где количество оборотов сравнительно большое. В результате, даже если разность между соответствующими величинами на детектированной форме волны и модели формы волны небольшая, разность между соответствующими величинами на детектированной форме волны и модели формы волны может в значительной мере отразиться на третьем значении. На основе третьего значения определяется, возникла или нет детонация в двигателе внутреннего сгорания. Таким образом, в случае, где разность между соответствующими величинами на детектированной форме волны и модели формы волны небольшая, несмотря на то, что детонация не возникла, можно безошибочно определить, что детонация не возникла. В отличие от этого в случае, где количество оборотов выходного вала двигателя внутреннего сгорания сравнительно большое, влияние второго значения может быть увеличено по сравнению со случаем, где количество оборотов сравнительно небольшое. Таким образом, в случае, где количество оборотов выходного вала двигателя внутреннего сгорания большое, может быть ограничено влияние разности между соответствующими величинами на детектированной форме волны и модели формы волны. В результате можно точно определить, возникла или нет детонация.
Предпочтительно операционный блок устанавливает второй интервал таким, что второй интервал меньше, когда количество оборотов выходного вала двигателя внутреннего сгорания меньше.
С помощью вышеописанной конфигурации второй интервал устанавливается таким, что второй интервал меньше, когда количество оборотов выходного вала двигателя внутреннего сгорания меньше, поскольку диапазон угла поворота кривошипа, в котором детектируется вибрация из-за детонации, меньше в случае, где количество оборотов выходного вала меньше, чем диапазон в случае, где количество оборотов больше. Соответственно, из углов поворота кривошипа, на которых используется разность между детектированной формой волны и моделью формы волны, может быть удален любой угол поворота кривошипа, при котором вибрация из-за детонации вряд ли возникает. Таким образом, можно точно определить, возникла или нет детонация.
Предпочтительнее, чтобы операционный блок вычислял первое значение путем суммирования разностей во втором интервале, каждая из которых является разностью между величиной на детектированной форме волны и величиной на модели формы волны. В случае, где количество оборотов выходного вала двигателя внутреннего сгорания является первым количеством оборотов, операционный блок вычисляет второе значение путем суммирования значений во втором интервале, каждое из которых определено путем вычитания положительного опорного значения из величины на модели формы волны, и в случае, где количество оборотов выходного вала двигателя внутреннего сгорания является вторым количеством оборотов, большим первого количества оборотов, операционный блок вычисляет второе значение путем суммирования величин на модели формы волны во втором интервале. Операционный блок вычисляет третье значение путем деления первого значения на второе значение. В случае, где третье значение меньше заранее определенного значения, операционный блок определяет, что возникла детонация в двигателе внутреннего сгорания.
С помощью вышеописанной конфигурации первое значение вычисляется путем суммирования соответствующих разностей между соответствующими величинами на детектированной форме волны и соответствующими величинами на модели формы волны во втором интервале. В случае, где количество оборотов выходного вала двигателя внутреннего сгорания является первым количеством оборотов, второе значение вычисляется путем суммирования значений во втором интервале, каждое из которых определено путем вычитания положительного опорного значения из величины на модели формы волны. В случае, где количество оборотов выходного вала двигателя внутреннего сгорания является вторым количеством оборотов, большим первого количества оборотов, второе значение вычисляется путем суммирования величин на модели формы волны во втором интервале. Третье значение вычисляется путем деления первого значения на второе значение. В случае, где третье значение меньше заранее определенного значения, определяется, что возникла детонация в двигателе внутреннего сгорания. Соответственно, возникла или нет детонация, можно определить с использованием относительного соотношения между разностью между соответствующими величинами на детектированной форме волны и модели формы волны и величиной на модели формы волны. Поэтому даже в случае, где разность между соответствующими величинами на детектированной форме волны и модели формы волны маленькая, можно безошибочно определить, что детонация не возникла, если из величины на модели формы волны считается, что детонация вряд ли возникает.
Предпочтительнее, чтобы операционный блок детектировал минимальное значение величины на детектированной форме волны, и устанавливал опорное значение на минимальное значение величины на детектированной форме волны.
С помощью вышеописанной конфигурации опорное значение устанавливается в минимальное значение величины на детектированной форме волны. Соответственно, из модели формы волны может быть удалена часть, меньшая минимального значения. Следовательно, может быть уменьшено влияние величины в модели формы волны.
Предпочтительнее, чтобы операционный блок детектировал соответствующие минимальные значения величины во множестве циклов зажигания, причем каждое из минимальных значений является минимальным значением величины на детектированной форме волны, и устанавливал опорное значение на значение, определенное путем прибавления произведения стандартного отклонения минимальных значений и коэффициента к медиане минимальных значений.
С помощью вышеописанной конфигурации опорное значение устанавливается в значение, определенное путем прибавления произведения стандартного отклонения минимальных значений и коэффициента к медиане минимальных значений. Из модели формы волны может быть удалена часть, меньшая значения, определенного путем прибавления произведения стандартного отклонения минимальных значений и коэффициента к медиане минимальных значений. Таким образом может быть уменьшено влияние величины в модели формы волны.
Предпочтительнее, чтобы операционный блок ограничивал опорное значение не более чем заранее определенным значением.
С помощью вышеописанной конфигурации опорное значение ограничивается не более чем заранее определенным значением. Соответственно, можно предупредить превращение опорного значения в чрезмерно большое.
Предпочтительнее, чтобы операционный блок вычислял среднее значение минимального значения величины на детектированной форме волны и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором минимальное значение величины присутствует на детектированной форме волны, и устанавливал опорное значение на среднее значение.
С помощью вышеописанной конфигурации опорное значение устанавливается в среднее значение минимального значения величины на детектированной форме волны и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором минимальное значение величины присутствует на детектированной форме волны. Соответственно, из модели формы волны может быть удалена часть, меньшая среднего значения. Таким образом может быть уменьшено влияние величины в модели формы волны.
Предпочтительнее, чтобы операционный блок вычислял соответствующие средние значения в множестве циклов зажигания, причем каждое из средних значений является средним значением минимального значения величины на детектированной форме волны и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором минимальное значение величины присутствует на детектированной форме волны, и устанавливал опорное значение на значение, определенное путем прибавления произведения стандартного отклонения средних значений и коэффициента к медиане средних значений.
С помощью вышеописанной конфигурации опорное значение устанавливается в значение, определенное путем прибавления произведения стандартного отклонения средних значений и коэффициента к медиане средних значений. Соответственно, из модели формы волны может быть удалена часть, меньшая значения, определенного путем прибавления произведения стандартного отклонения средних значений и коэффициента к медиане средних значений. Таким образом может быть уменьшено влияние величины в модели формы волны.
Предпочтительнее, чтобы опорное значение являлось постоянным значением.
С помощью вышеописанной конфигурации из модели формы волны может быть удалена часть, меньшая постоянного значения. Таким образом может быть уменьшено влияние величины в модели формы волны.
Краткое описание чертежей
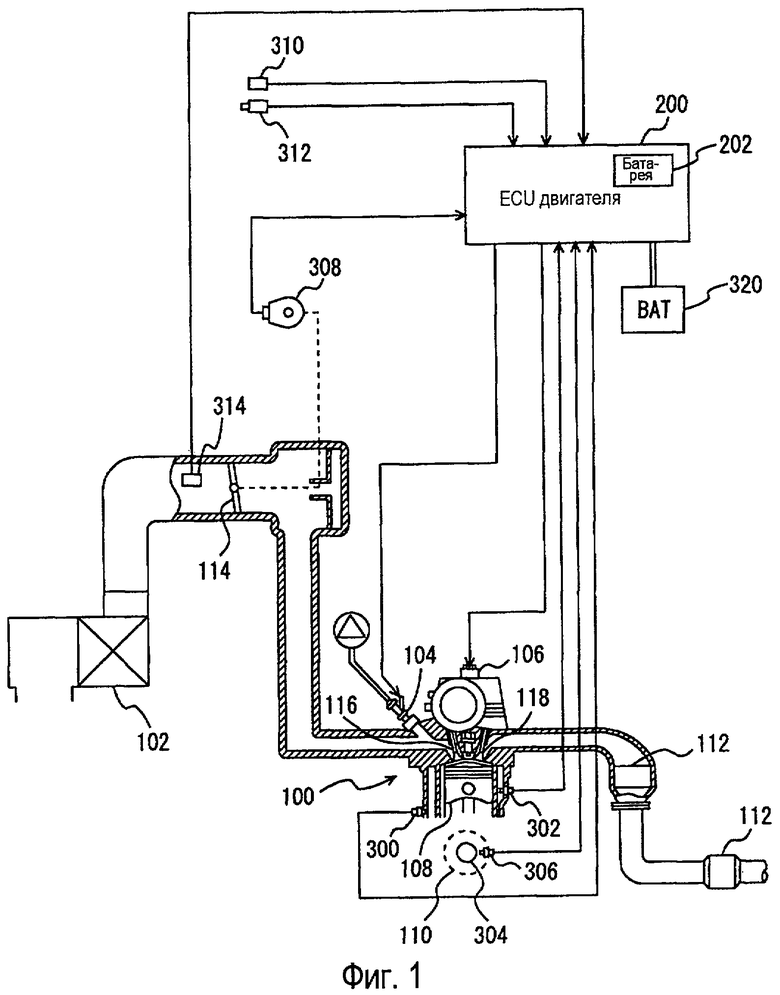
Фиг. 1 - общая схема конфигурации, показывающая двигатель, управляемый ECU двигателя, который является устройством определения детонации в соответствии с первым вариантом осуществления настоящего изобретения.
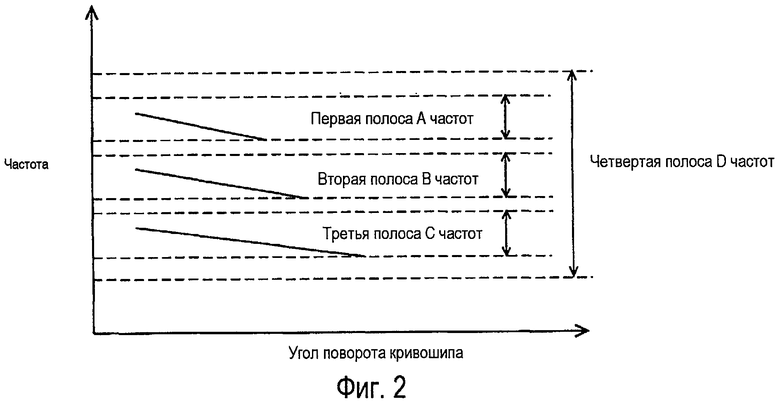
Фиг. 2 показывает полосы частот вибрации, сформированной двигателем, когда возникает детонация.
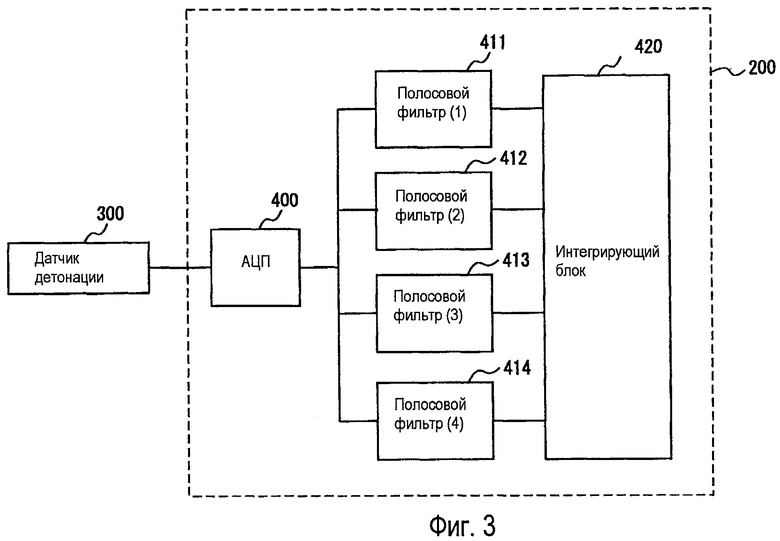
Фиг. 3 - блок-схема управления, показывающая ECU двигателя.
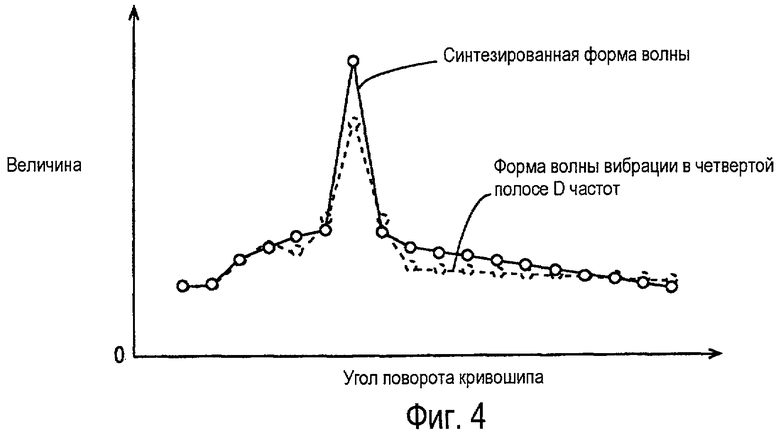
Фиг. 4 - (первая) диаграмма, показывающая форму волны вибрации двигателя.
Фиг. 5 - (первая) диаграмма, показывающая форму волны вибрации и модель формы ударной волны при сравнении друг с другом.
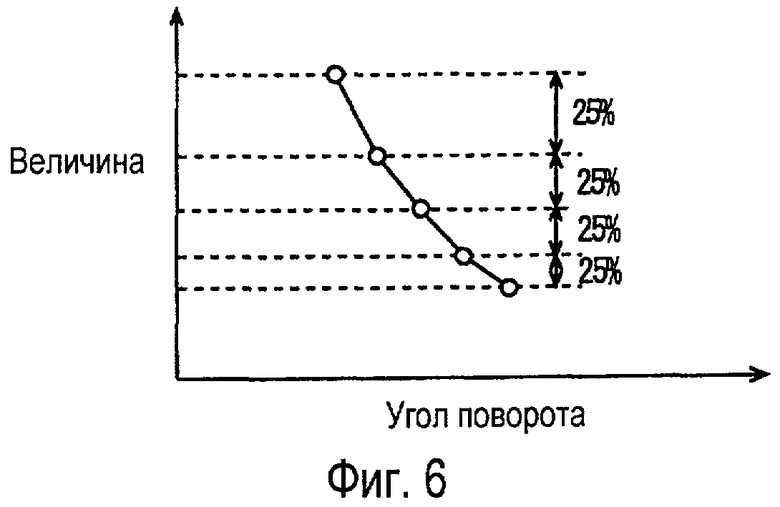
Фиг. 6 - диаграмма, показывающая модель формы ударной волны.
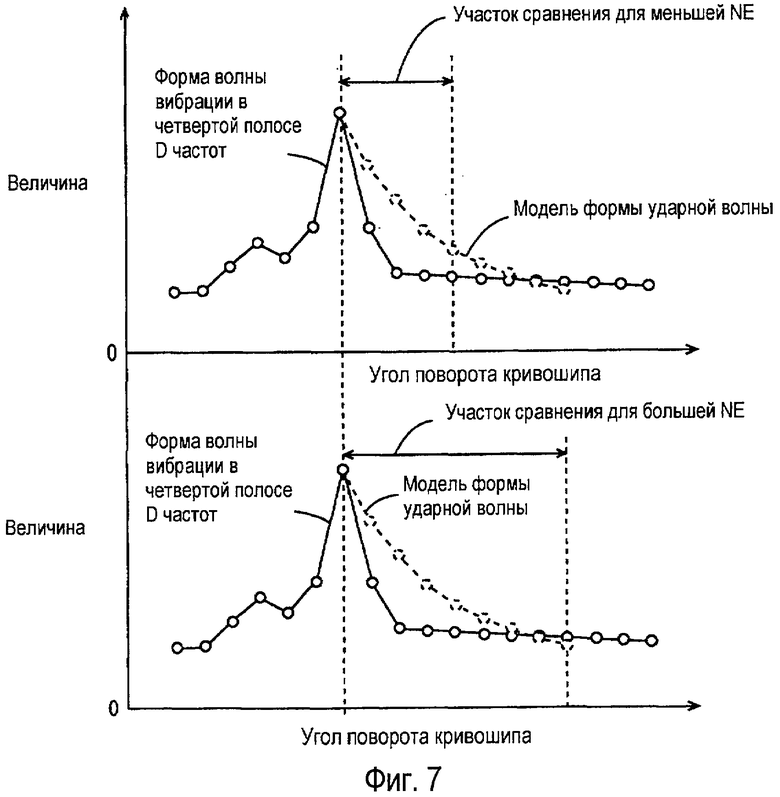
Фиг. 7 - (первая) диаграмма, показывающая участок сравнения, где форма волны вибрации и модель формы ударной волны сравниваются друг с другом.
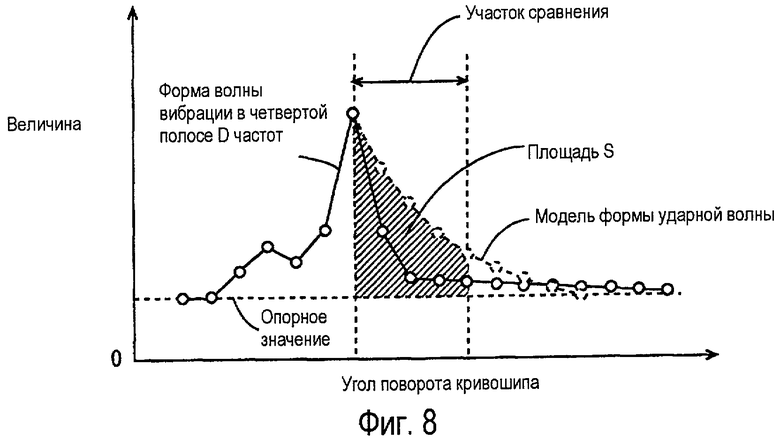
Фиг. 8 - (первая) диаграмма, показывающая площадь S, используемую для вычисления коэффициента K корреляции.
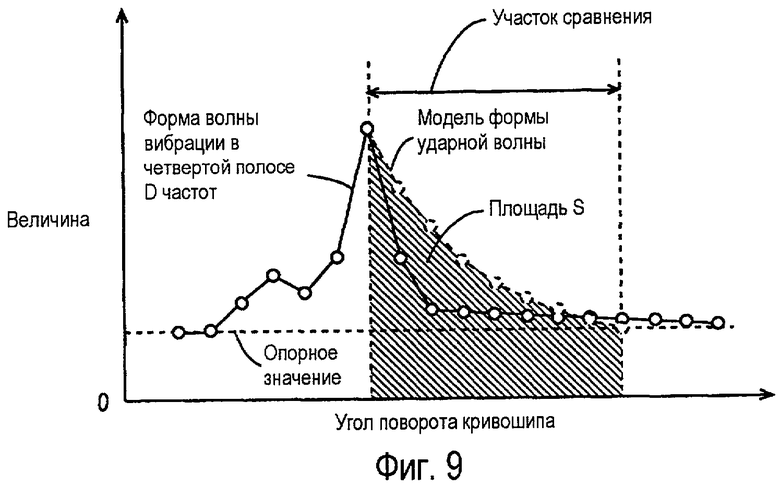
Фиг. 9 - (вторая) диаграмма, показывающая площадь S, используемую для вычисления коэффициента K корреляции.
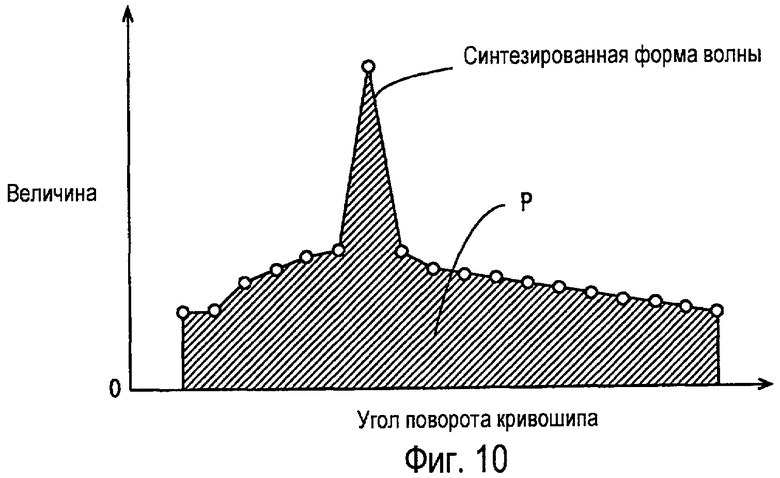
Фиг. 10 - диаграмма, показывающая сумму величин синтезированной формы волны, используемой для вычисления величины N детонации.
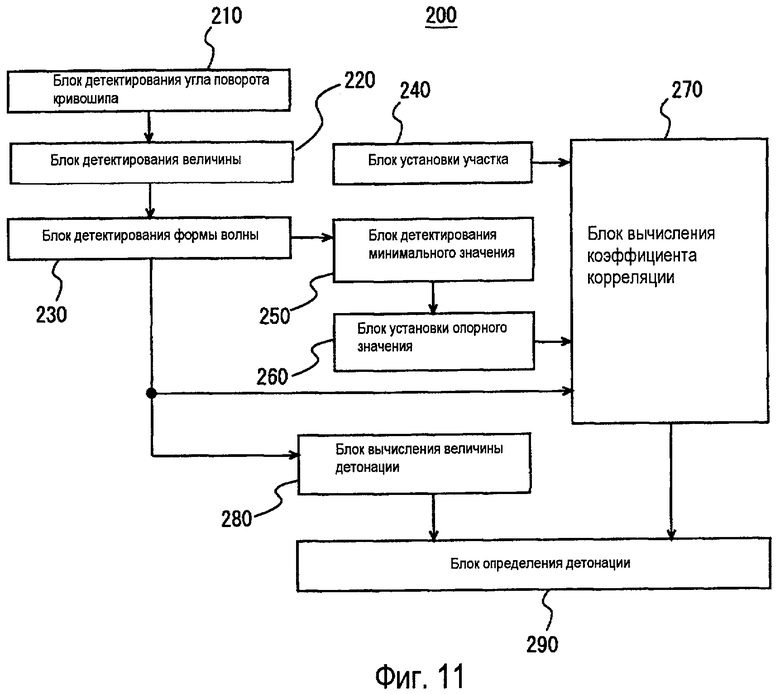
Фиг. 11 - функциональная блок-схема ECU двигателя, который является устройством определения детонации в соответствии с первым вариантом осуществления настоящего изобретения.
Фиг. 12 - блок-схема алгоритма, показывающая управляющую структуру программы, выполняемой ECU двигателя, который является устройством определения детонации в соответствии с первым вариантом осуществления настоящего изобретения.
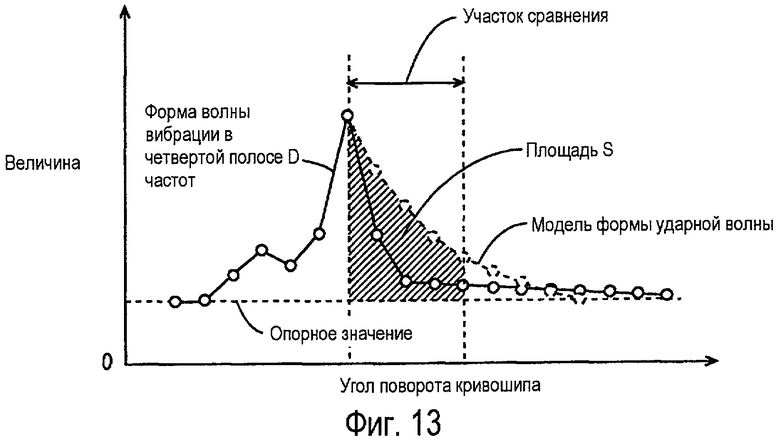
Фиг. 13 - (третья) диаграмма, показывающая площадь S, используемую для вычисления коэффициента K корреляции.
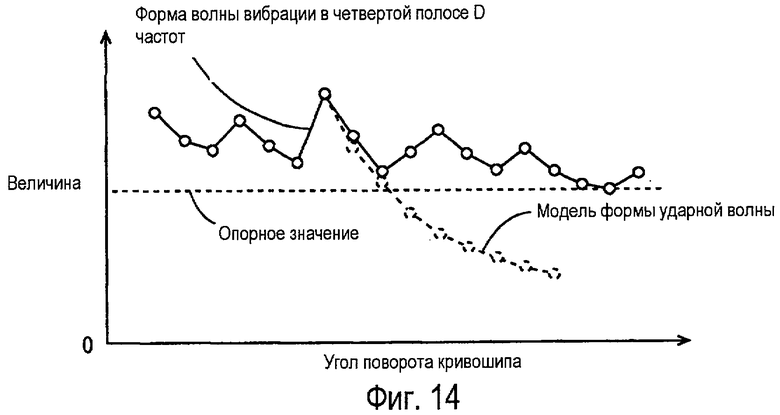
Фиг. 14 - (вторая) диаграмма, показывающая форму волны вибрации и модель формы ударной волны при сравнении друг с другом.
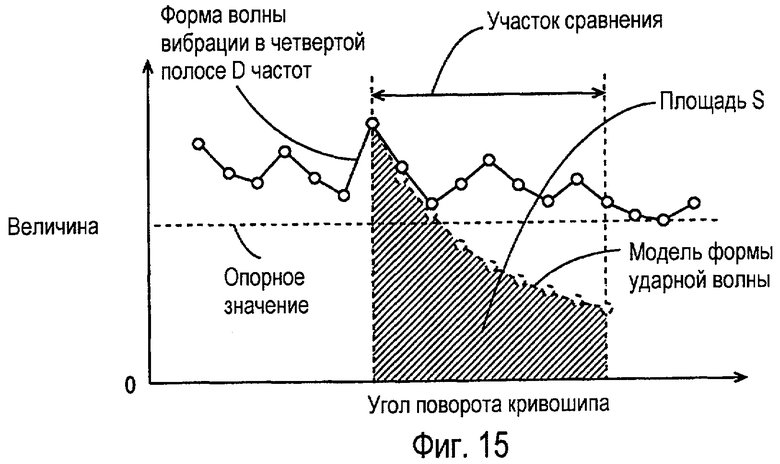
Фиг. 15 - (четвертая) диаграмма, показывающая площадь S, используемую для вычисления коэффициента K корреляции.
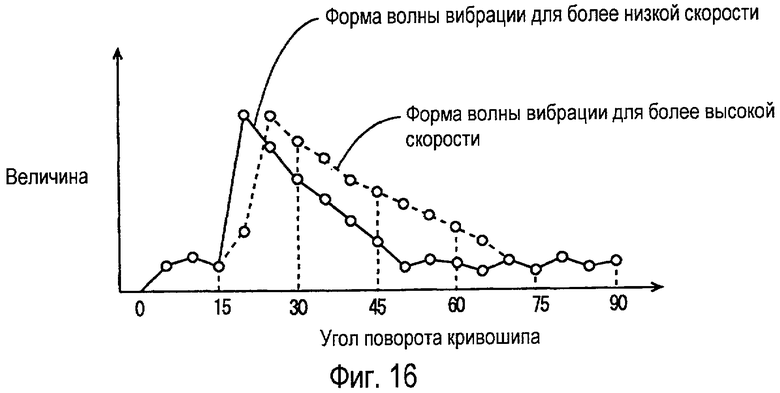
Фиг. 16 - (вторая) диаграмма, показывающая форму волны вибрации двигателя.
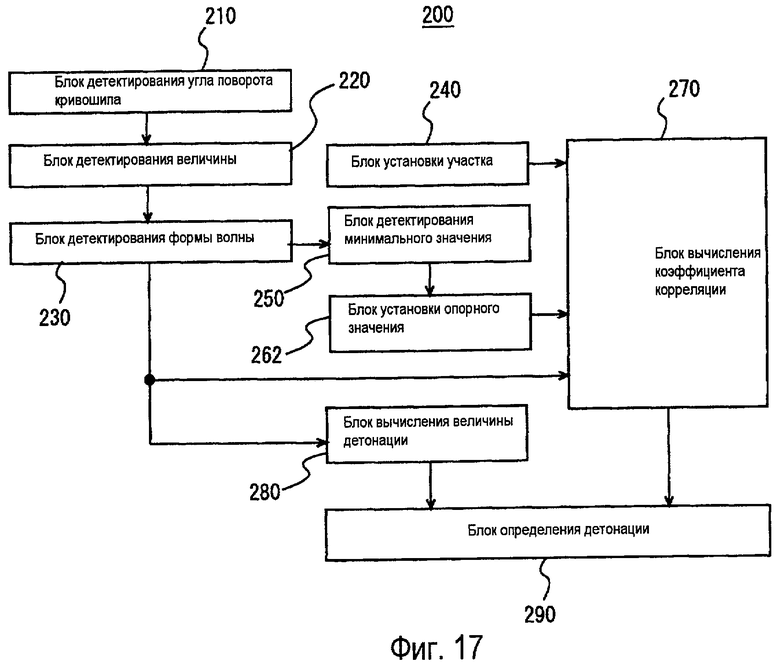
Фиг. 17 - функциональная блок-схема ECU двигателя, который является устройством определения детонации в соответствии со вторым вариантом осуществления настоящего изобретения.
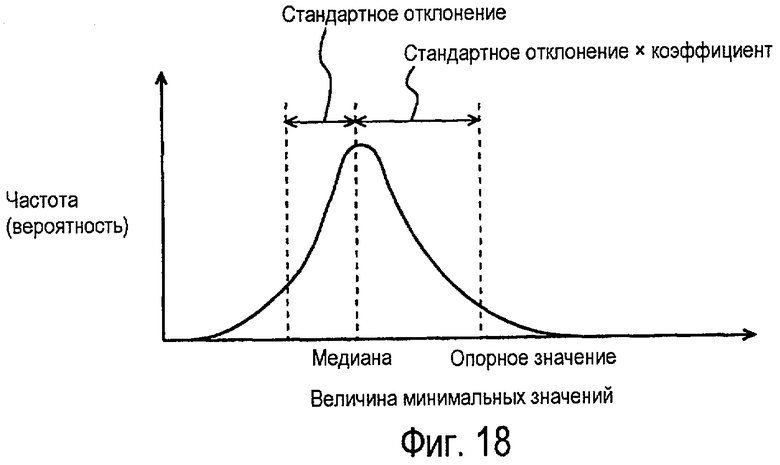
Фиг. 18 - диаграмма, показывающая частотное распределение минимальных значений величины.
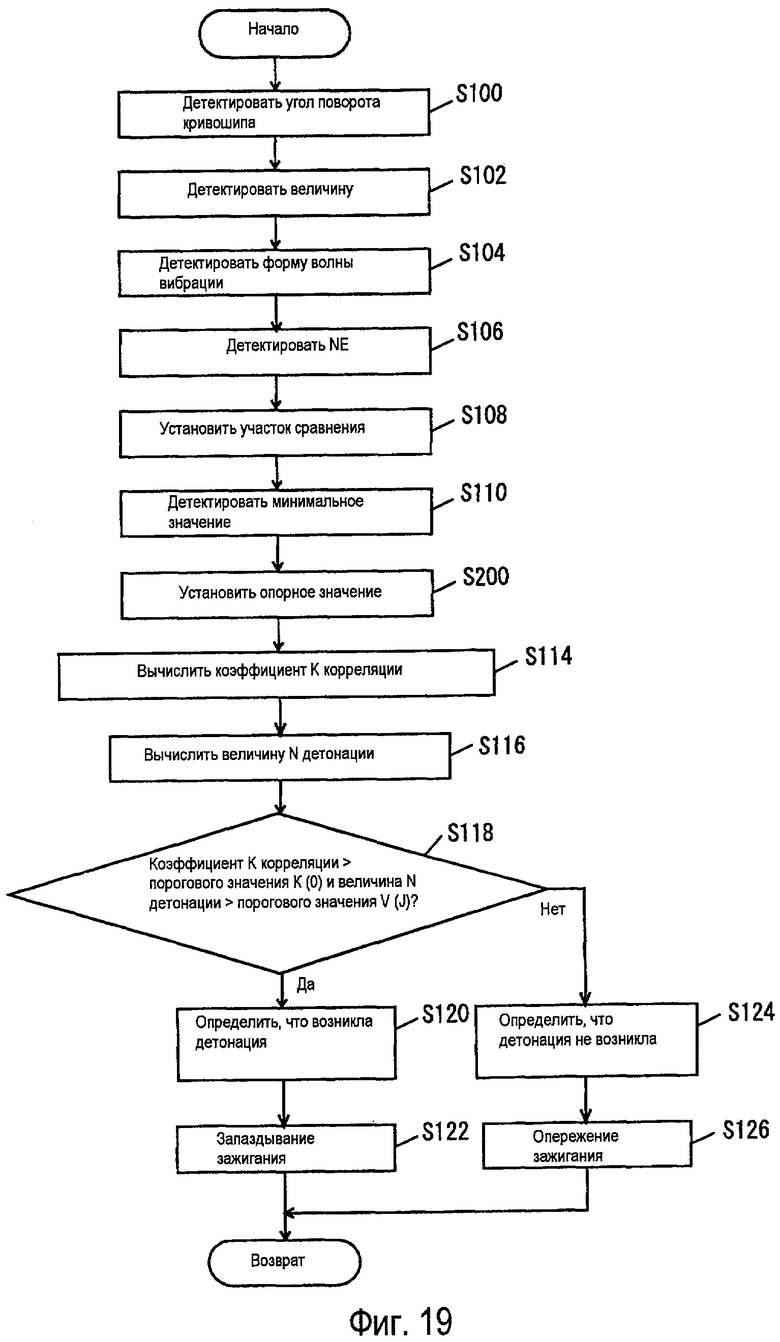
Фиг. 19 - блок-схема алгоритма, показывающая управляющую структуру программы, выполняемой ECU двигателя, который является устройством определения детонации в соответствии со вторым вариантом осуществления настоящего изобретения.
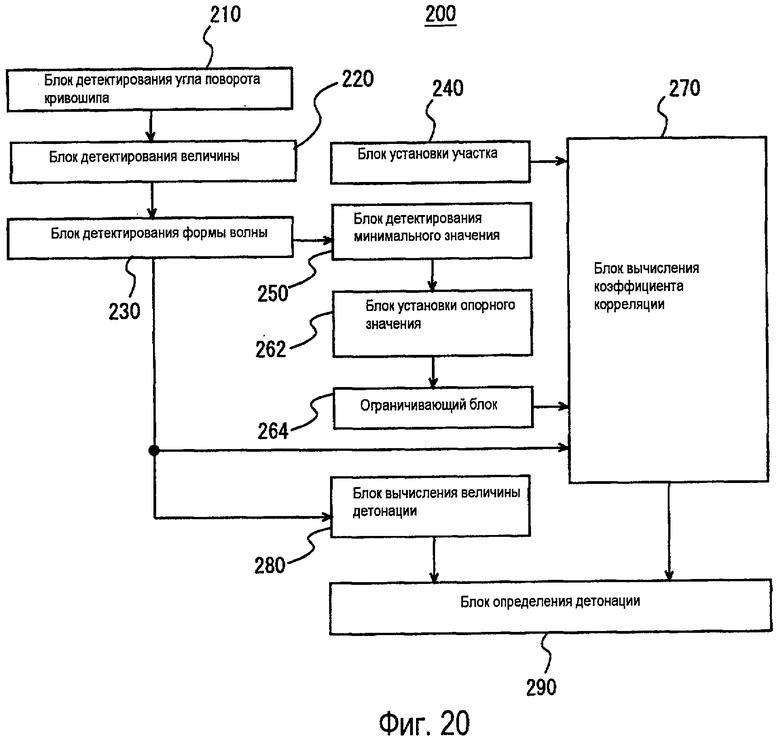
Фиг. 20 - функциональная блок-схема ECU двигателя, который является устройством определения детонации в соответствии с третьим вариантом осуществления настоящего изобретения.
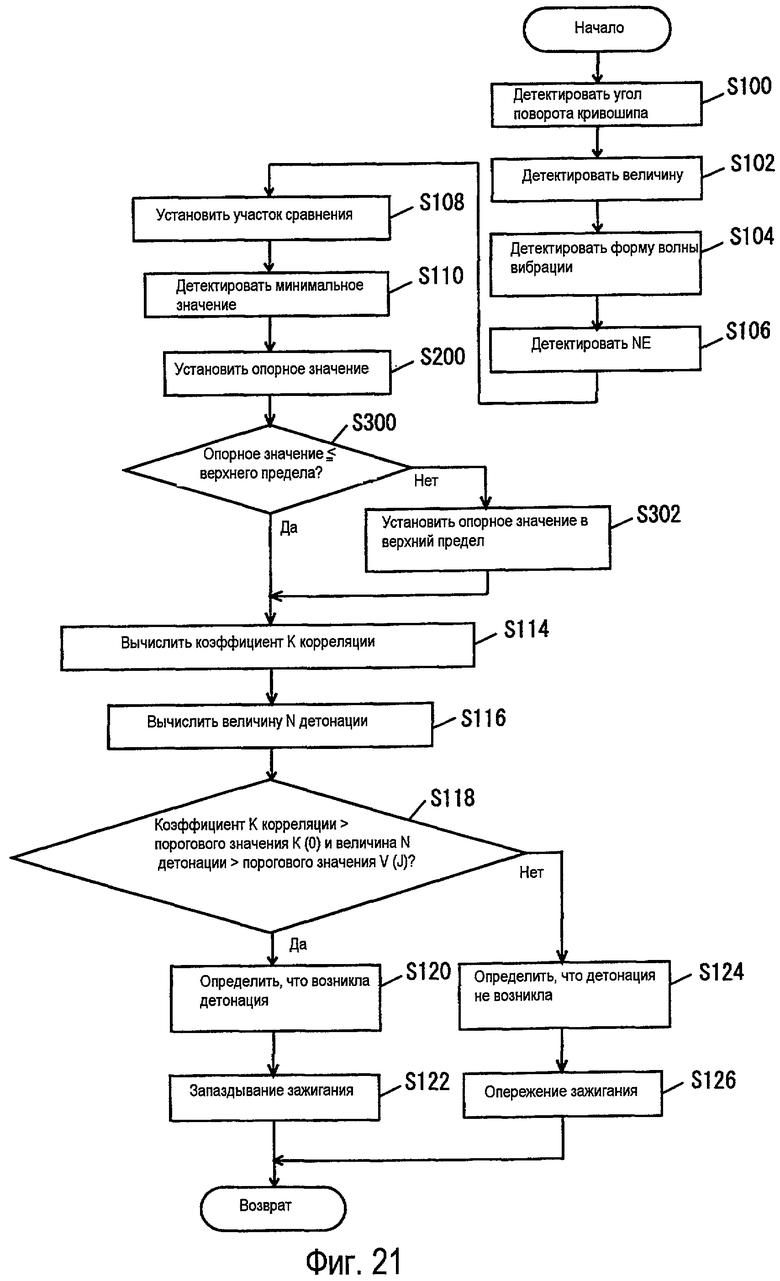
Фиг. 21 - блок-схема алгоритма, показывающая управляющую структуру программы, выполняемой ECU двигателя, который является устройством определения детонации в соответствии с третьим вариантом осуществления настоящего изобретения.
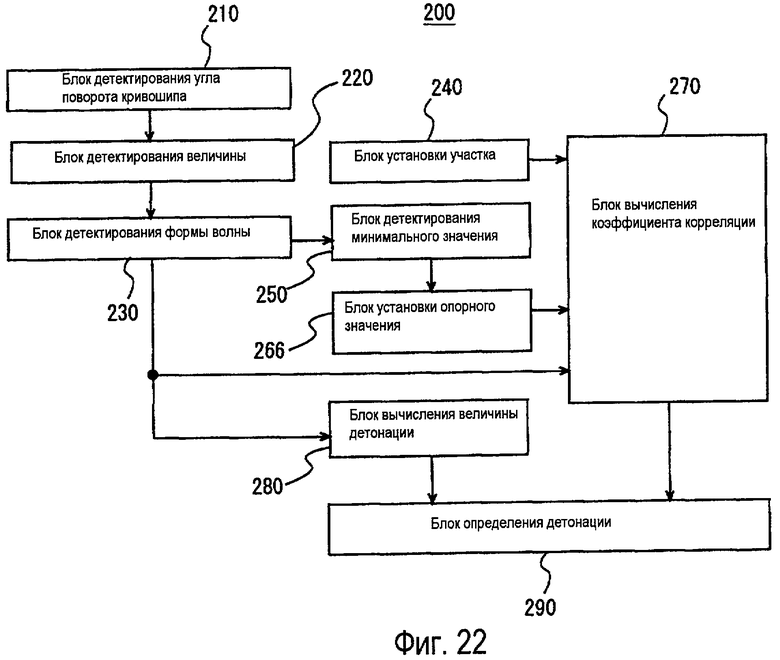
Фиг. 22 - функциональная блок-схема ECU двигателя, который является устройством определения детонации в соответствии с четвертым вариантом осуществления настоящего изобретения.
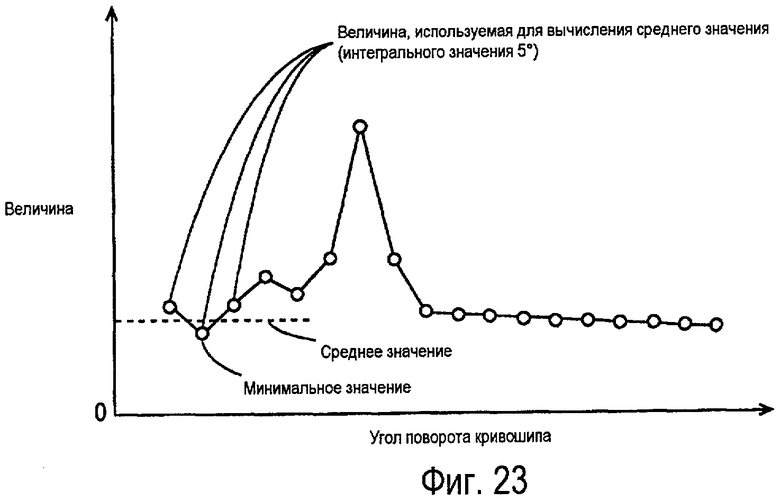
Фиг. 23 - диаграмма, показывающая среднее значение, вычисленное для установки опорного значения.
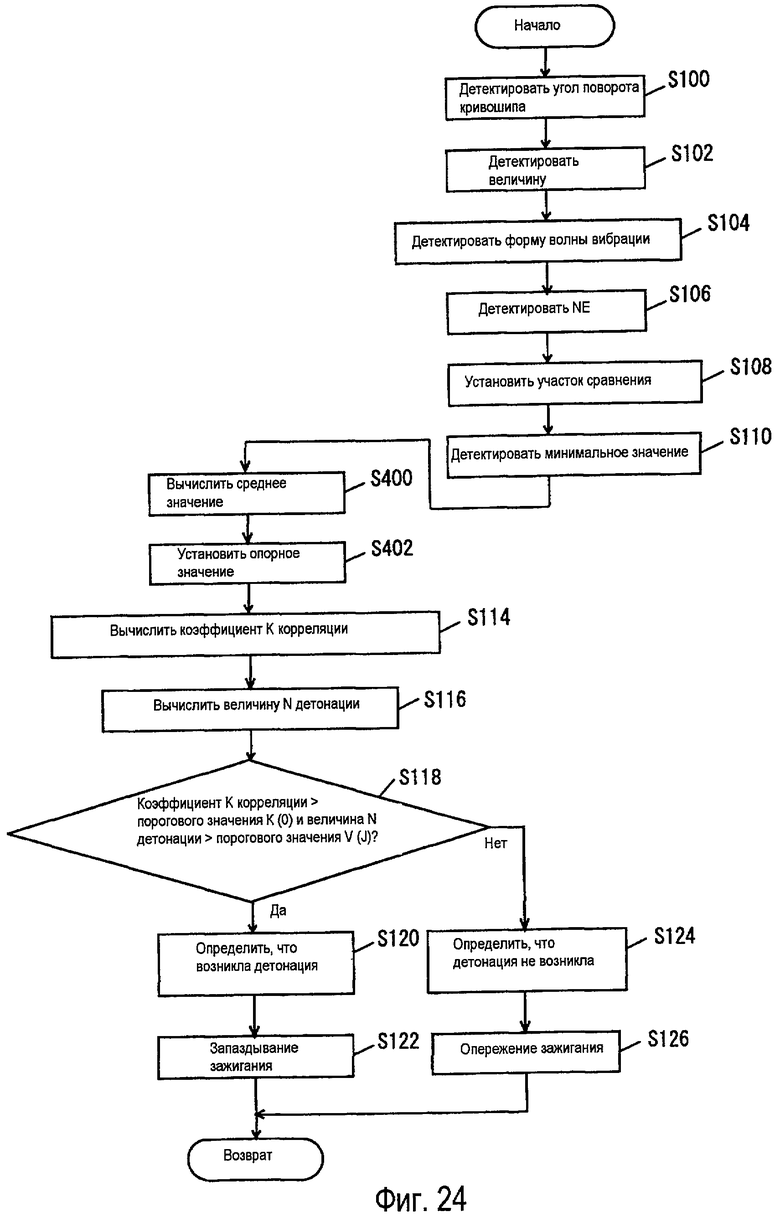
Фиг. 24 - блок-схема алгоритма, показывающая управляющую структуру программы, выполняемой ECU двигателя, который является устройством определения детонации в соответствии с четвертым вариантом осуществления настоящего изобретения.
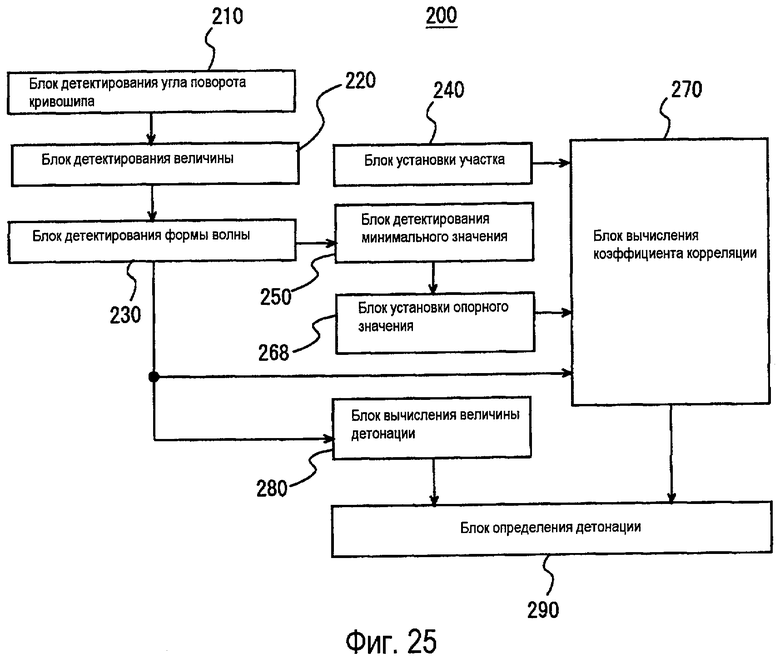
Фиг. 25 - функциональная блок-схема ECU двигателя, который является устройством определения детонации в соответствии с пятым вариантом осуществления настоящего изобретения.
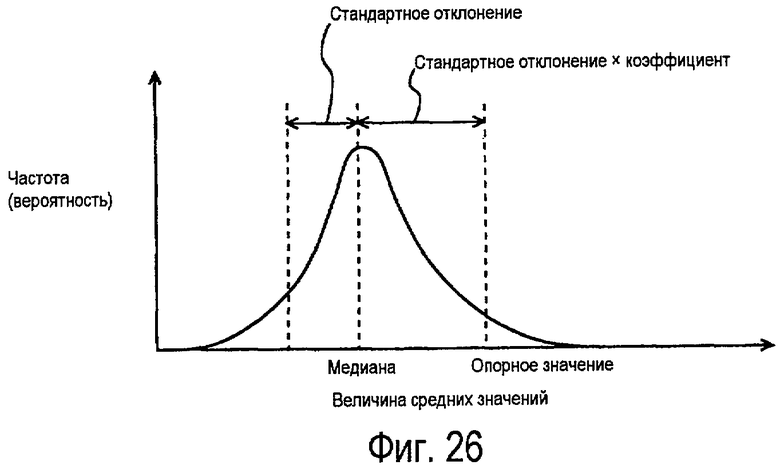
Фиг. 26 - диаграмма, показывающая частотное распределение средних значений.
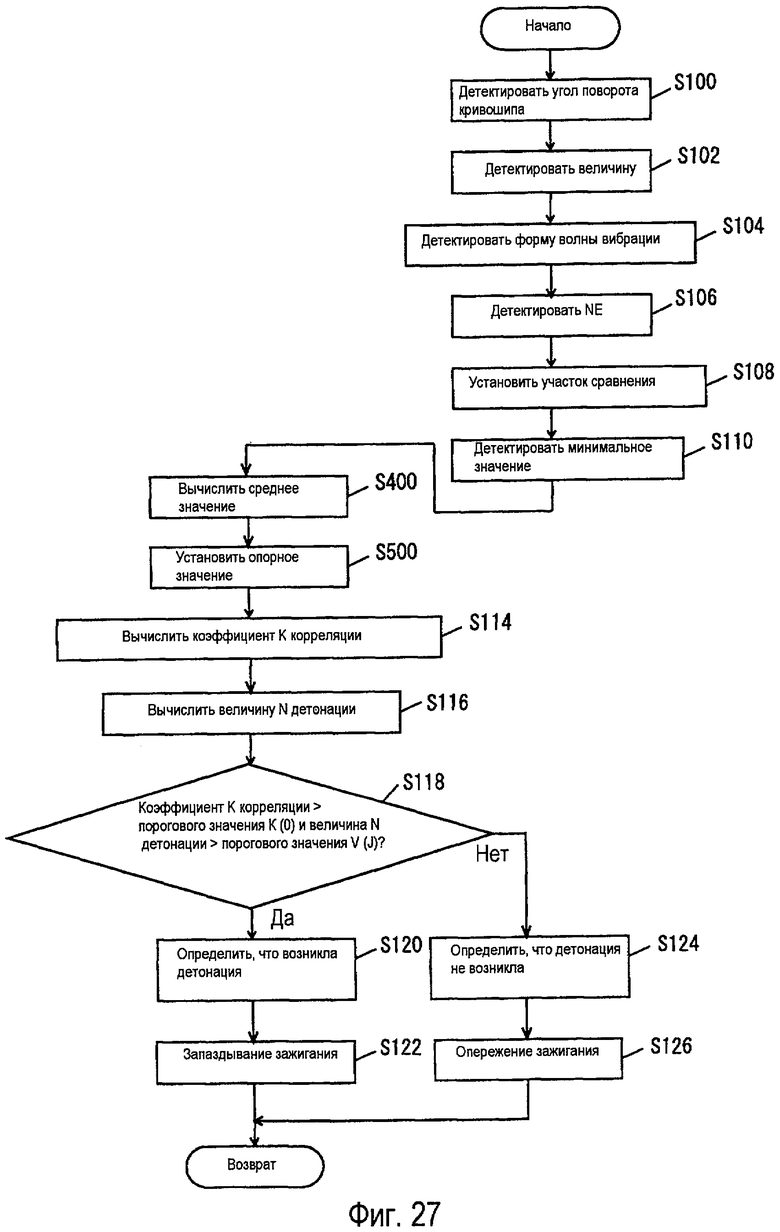
Фиг. 27 - блок-схема алгоритма, показывающая управляющую структуру программы, выполняемой ECU двигателя, который является устройством определения детонации в соответствии с пятым вариантом осуществления настоящего изобретения.
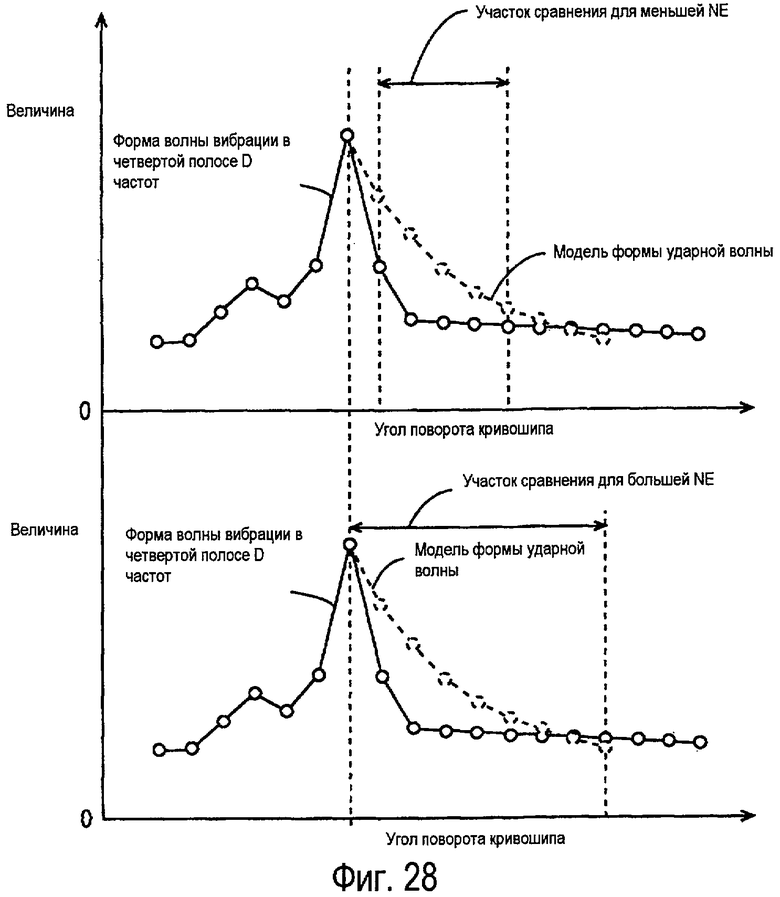
Фиг. 28 - (вторая) диаграмма, показывающая участок сравнения, где форма волны вибрации и модель формы ударной волны сравниваются друг с другом.
Лучшие варианты осуществления изобретения
Ниже будут описываться варианты осуществления настоящего изобретения со ссылкой на чертежи. В нижеследующем описании одинаковые компоненты обозначаются одинаковыми номерами позиций. Они с тем же успехом называются и функционируют идентично. Поэтому их подробное описание не будет повторяться.
Первый вариант осуществления
Ссылаясь на фиг. 1, будет описываться двигатель 100 транспортного средства, оборудованный устройством определения детонации в соответствии с вариантом осуществления настоящего изобретения. Двигатель 100 снабжается множеством цилиндров. Устройство определения детонации в данном варианте осуществления реализуется с помощью, например, программы, выполняемой ECU 200 двигателя (Электронный блок управления). Программа, выполняемая ECU 200 двигателя, может быть записана на такой носитель записи, как CD (компакт-диск) или DVD (универсальный цифровой диск), чтобы распространяться на рынке.
Двигатель 100 является двигателем внутреннего сгорания, в котором топливно-воздушная смесь из воздуха, забранного из воздухоочистителя 102, и топлива, впрыснутого из форсунки 104, воспламеняется с помощью свечи 106 зажигания и сжигается в камере сгорания. Хотя распределение зажигания регулируется до MBT (Минимальное опережение для наилучшего крутящего момента), при котором выходной крутящий момент является максимальным, распределение зажигания замедляется или ускоряется в соответствии с рабочим состоянием двигателя 100, например, когда возникает детонация.
Когда сжигается топливно-воздушная смесь, поршень 108 выталкивается давлением сгорания, и вращается коленчатый вал 110. Топливно-воздушная смесь после сжигания (отработавший газ) очищается трёхкомпонентным нейтрализатором 112 и после этого выпускается за пределы транспортного средства. Количество воздуха, поступающего в двигатель 100, регулируется дроссельной заслонкой 114.
Двигатель 100 управляется ECU 200 двигателя. К ECU 200 двигателя подключаются датчик 300 детонации, датчик 302 температуры охлаждающей жидкости, датчик 306 положения кривошипа, обращенный к бегунку 304 распределителя зажигания, датчик 308 положения открытия дросселя, датчик 310 скорости транспортного средства, замок 312 зажигания и расходомер 314 воздуха.
Датчик 300 детонации предусматривается для блока цилиндров двигателя 100. Датчик 300 детонации состоит из пьезоэлектрического элемента. Датчик 300 детонации формирует напряжение в ответ на вибрацию двигателя 100. Величина напряжения соответствует величине вибрации. Датчик 300 детонации отправляет в ECU 200 двигателя сигнал, представляющий напряжение. Датчик 302 температуры охлаждающей жидкости детектирует температуру охлаждающей жидкости в водяной рубашке двигателя 100 и отправляет в ECU 200 двигателя сигнал, представляющий результат детектирования.
Бегунок 304 распределителя зажигания предусматривается на коленчатом валу 110 и вращается вместе с коленчатым валом 110. На внешней периферии бегунка 304 распределителя зажигания предусматривается множество выступов с заранее определенными интервалами. Датчик 306 положения кривошипа обращен к выступам бегунка 304 распределителя зажигания. Когда вращается бегунок 304 распределителя зажигания, изменяется воздушный зазор между выступом бегунка 304 распределителя зажигания и датчиком 306 положения кривошипа, и в результате магнитный поток, проходящий через часть с обмоткой датчика 306 положения кривошипа, увеличивается/уменьшается для формирования электродвижущей силы в части с обмоткой. Датчик 306 положения кривошипа отправляет в ECU 200 двигателя сигнал, представляющий электродвижущую силу. ECU 200 двигателя детектирует угол поворота кривошипа и количество оборотов коленчатого вала 110 на основе сигнала, отправленного от датчика 306 положения кривошипа.
Датчик 308 положения открытия дросселя детектирует положение открытия дросселя и отправляет в ECU 200 двигателя сигнал, представляющий результат детектирования. Датчик 310 скорости транспортного средства детектирует количество оборотов колеса (не показано) и отправляет в ECU 200 двигателя сигнал, представляющий результат детектирования. ECU 200 двигателя вычисляет скорость транспортного средства на основе количества оборотов колеса. Замок 312 зажигания включается водителем, когда нужно запустить двигатель 100. Расходомер 314 воздуха детектирует количество всасываемого воздуха в двигатель 100 и отправляет в ECU 200 двигателя сигнал, представляющий результат детектирования.
ECU 200 двигателя управляется электрической энергией, подаваемой от вспомогательной батареи 320, которая является источником питания. ECU 200 двигателя выполняет рабочие процессы на основе сигналов, отправленных от соответствующих датчиков и замка 312 зажигания, а также карты и программы, сохраненной в ROM 202 (постоянное запоминающее устройство), и управляет соответствующими устройствами с тем, чтобы позволить двигателю 100 работать в нужном состоянии.
В данном варианте осуществления ECU 200 двигателя определяет форму волны вибрации (в дальнейшем называемую "формой волны вибрации") у двигателя 100 в заранее определенном интервале детектирования детонации (участок от заранее определенного первого угла поворота кривошипа до заранее определенного второго угла поворота кривошипа) на основе сигнала, отправленного от датчика 300 детонации и угла поворота кривошипа, и определяет, возникла или нет детонация в двигателе 100 на основе детектированной формы волны вибрации. Интервал детектирования детонации в данном варианте осуществления является участком от верхней мёртвой точки (0°) до 90°в рабочем такте. Интервал детектирования детонации этим не ограничивается.
Когда возникает детонация, в двигателе 100 формируется вибрация на частоте, близкой к частоте, показанной в виде сплошной линии на фиг. 2. Частота вибрации, вызванная детонацией, не является постоянной, но обладает некоторой полосой частот.
Если вибрация детектируется в сравнительно широкой полосе частот, то, скорее всего в нее включается шум (например, вибрация, вызванная форсункой в цилиндре или впускным/выпускным клапаном на ее седле), отличный от вибрации, вызванной детонацией.
Наоборот, если вибрация детектируется в сравнительно узкой полосе частот, то может подавляться составляющая шума, включенная в величину детектированной вибрации, наряду с тем, что характеристическая часть (например, хронометраж возникновения вибрация и ее коэффициент демпфирования) в составляющей шума также удаляется из формы волны вибрации. В этом случае, даже если вибрация фактически обусловлена составляющей шума, то детектируется форма волны вибрации, не включающая никакой составляющей шума, а именно форма волны вибрации, аналогичная форме волны вибрации, детектированной, когда возникает детонация. Поэтому в этом случае сложно отличить вибрацию из-за детонации от вибрации из-за шума на основе формы волны вибрации.
Соответственно, в данном варианте осуществления вибрация детектируется в первой полосе A частот, второй полосе B частот и третьей полосе C частот, которые устанавливаются имеющими меньшую полосу пропускания, чтобы точно уловить вибрацию, характерную для детонации.
С другой стороны, чтобы определить, возникла или нет детонация, учитывая шум, когда тот возник, вибрация детектируется в более широкой четвертой полосе D частот, включающей с первой по третью полосы A - C частот, чтобы уловить шум.
Как показано на фиг.3, ECU 200 двигателя включает в себя аналого-цифровой преобразователь 400, полосовой фильтр (1) 411, полосовой фильтр (2) 412, полосовой фильтр (3) 413, полосовой фильтр (4) 414 и интегрирующий блок 420.
Полосовой фильтр (1) 411 пропускает только сигнал в первой полосе A частот из сигналов, переданных от датчика 300 детонации. Другими словами, полосовой фильтр (1) 411 извлекает только вибрацию в первой полосе A частот из вибраций, детектированных датчиком 300 детонации.
Полосовой фильтр (2) 412 пропускает только сигнал во второй полосе B частот из сигналов, переданных от датчика 300 детонации. Другими словами, полосовой фильтр (2) 412 извлекает только вибрацию во второй полосе B частот из вибраций, детектированных датчиком 300 детонации.
Полосовой фильтр (3) 413 пропускает только сигнал в третьей полосе C частот из сигналов, переданных от датчика 300 детонации. Другими словами, полосовой фильтр (3) 413 извлекает только вибрацию в третьей полосе C частот из вибраций, детектированных датчиком 300 детонации.
Полосовой фильтр (4) 414 пропускает только сигнал в четвертой полосе D частот из сигналов, переданных от датчика 300 детонации. Другими словами, полосовой фильтр (4) 414 извлекает только вибрацию в четвертой полосе D частот из вибраций, детектированных датчиком 300 детонации.
Интегрирующий блок 420 вычисляет интегральное значение путем интегрирования сигналов, выбранным полосовым фильтром (1) 411 - полосовым фильтром (4) 414, а именно интегрирования величин вибрации для каждого диапазона угла поворота кривошипа в 5° (в дальнейшем также называемого интегральным значением 5°). Интегральное значение 5° вычисляется для каждой полосы частот.
Далее соответствующие интегральные значения, вычисленные для полос (A-C) частот с первой по третью, складываются вместе в связи с углом поворота кривошипа. Другими словами, соответствующие формы волн вибрации у полос A-C частот с первой по третью объединяются в синтезированную форму волны.
Таким образом, в данном варианте осуществления, который показан на фиг. 4, синтезированная форма волны, образованная из полос A-C частот с первой по третью и формы волны вибрации четвертой полосы D частот, используется в качестве форм волн вибрации двигателя 100. Форма волны вибрации (интегральное значение 5°) четвертой полосы D частот не объединяется, а используется отдельно.
Из детектированных форм волн вибрации форма волны вибрации в четвертой полосе D частот сравнивается с моделью формы ударной волны в диапазоне угла поворота кривошипа от угла поворота кривошипа, при котором величина является максимальной, как показано на фиг. 5. Модель формы ударной волны задается в качестве опорной формы волны вибрации двигателя 100. В данном варианте осуществления величина в модели формы ударной волны устанавливается каждый раз, когда детектируется форма волны вибрации в четвертой полосе D частот. А именно, величина в модели формы ударной волны определяется для каждого цикла зажигания.
Величина в модели формы ударной волны устанавливается на основе величины в форме волны вибрации в четвертой полосе D частот (интегральное значение 5°). Точнее говоря, величина устанавливается так, чтобы максимальная величина на модели формы ударной волны была идентична максимальной величине на форме волны вибрации в четвертой полосе D частот.
Величины, отличные от максимальной величины, устанавливаются в соответствии с частотой NE вращения двигателя и нагрузкой двигателя 100. Точнее говоря, коэффициент демпфирования величины на угле поворота кривошипа относительно величины на прилегающем угле поворота кривошипа устанавливается в соответствии с картой, используя в качестве параметров частоту NE вращения двигателя и нагрузку двигателя 100.
Поэтому в случае, например, где коэффициент демпфирования равен 25% и устанавливаются величины в диапазоне угла поворота кривошипа в 20°, величина уменьшается на 25% на каждый единичный угол поворота кривошипа, как показано на фиг. 6. Здесь способ установки величины на модели формы ударной волны не ограничивается вышеописанным способом.
Форма волны вибрации и модель формы ударной волны сравниваются друг с другом на участке сравнения. Участок сравнения устанавливается в соответствии с частотой NE вращения двигателя. Как показано на фиг. 7, участок сравнения устанавливается таким образом, чтобы участок сравнения был меньше, когда частота NE вращения двигателя меньше. Участок сравнения может быть установлен в соответствии с нагрузкой двигателя 100.
В данном варианте осуществления ECU 200 двигателя вычисляет коэффициент K корреляции, который представляет степень подобия формы волны вибрации с моделью формы ударной волны (представляет отклонение между формой волны вибрации и моделью формы ударной волны). Момент зажигания, при котором величина вибрации максимальна на форме волны вибрации, устанавливается совпадающим с моментом зажигания, при котором величина вибрации максимальна на модели формы ударной волны, а затем вычисляется абсолютное значение разности (величина отклонения) между величиной на форме волны вибрации и величиной на модели формы ударной волны для каждого угла поворота кривошипа (каждые 5°), чтобы посредством этого вычислить коэффициент K корреляции. Вместо этого может вычисляться абсолютное значение разности между величиной на форме волны вибрации и величиной на модели формы ударной волны для каждого угла поворота кривошипа, отличного от 5°.
Здесь предполагается, что абсолютное значение разности между величиной на форме волны вибрации и величиной на модели формы ударной волны для каждого угла поворота кривошипа равно ΔS (I) (I - натуральное число). Как показано косыми линиями на фиг. 8, предполагается, что сумма величин на модели формы ударной волны в участке сравнения, то есть площадь в модели формы ударной волны в участке сравнения, равна S. Коэффициент K корреляции вычисляется с использованием уравнения (1) ниже:
K=(S-Σ ΔS (I))/S, (1)
(1)
где Σ ΔS (I) - сумма ΔS (I) в участке сравнения.
В данном варианте осуществления в случае, где частота NE вращения двигателя меньше порогового значения NE (1), сумма значений, каждое из которых определено путем вычитания положительного опорного значения из величины на модели формы ударной волны в участке сравнения, который указан косыми линиями на фиг. 8, используется в качестве площади S у модели формы ударной волны. А именно, в участке сравнения площадь, занятая величинами не меньше опорного значения, используется в качестве площади S у модели формы ударной волны. В отличие от этого в случае, где частота NE вращения двигателя не меньше порогового значения NE (1), коэффициент K корреляции вычисляется с использованием всей площади S у модели формы ударной волны в участке сравнения, как указано косыми линиями на фиг. 9. В качестве опорного значения используется, например, минимальная величина на форме волны вибрации в четвертой полосе D частот. Способ вычисления коэффициента K корреляции не ограничивается вышеописанным способом.
Дополнительно ECU 200 двигателя вычисляет величину N детонации, используя сумму интегральных значений 5° синтезированной формы волны у полос A-C частот с первой по третью, как указано косыми линиями на фиг. 10.
Предполагается, что сумма интегральных значений 5° синтезированной формы волны равна P, а значение, представляющее величину вибрации двигателя 100 в состоянии, где вибрация не возникает в двигателе 100, равно BGL (фоновый уровень). Тогда величина N детонации вычисляется с использованием уравнения N=P/BGL. BGL определяется заранее, например, на основе моделирования или эксперимента, и сохраняется в ROM 202. Способ вычисления величины N детонации не ограничивается вышеописанным способом.
В данном варианте осуществления ECU 200 двигателя сравнивает вычисленную величину N детонации с пороговым значением V (J), сохраненным в ROM 202, и дополнительно сравнивает коэффициент K корреляции с пороговым значением K (0), сохраненным в ROM 202, чтобы для каждого цикла зажигания определить, возникла или нет детонация в двигателе 100.
Ссылаясь на фиг. 11, будет дано описание функций ECU 200 двигателя, который является устройством определения детонации в данном варианте осуществления. Описанные ниже функции могут быть реализованы с помощью программного обеспечения или реализованы с помощью аппаратных средств.
ECU 200 двигателя включает в себя блок 210 детектирования угла поворота кривошипа, блок 220 детектирования величины, блок 230 детектирования формы волны, блок 240 установки участка, блок 250 детектирования минимального значения, блок 260 установки опорного значения, блок 270 вычисления коэффициента корреляции, блок 280 вычисления величины детонации и блок 290 определения детонации.
Блок 210 детектирования угла поворота кривошипа детектирует угол поворота кривошипа на основе сигнала, отправленного от датчика 306 положения кривошипа.
Блок 220 детектирования величины детектирует величину вибрации в интервале детектирования детонации на основе сигнала, отправленного от датчика 300 детонации. Величина вибрации детектируется совместно с углом поворота кривошипа. Дополнительно величина вибрации представляется посредством значения выходного напряжения у датчика 300 детонации. Величина вибрации может представляться посредством значения, соответствующего значению выходного напряжения у датчика 300 детонации.
Блок 230 детектирования формы волны детектирует форму волны вибрации в интервале детектирования детонации путем интегрирования величин вибрации для каждого угла поворота кривошипа в 5°.
Блок 240 установки участка устанавливает участок сравнения, где форма волны вибрации и модель формы ударной волны сравниваются друг с другом, чтобы участок был меньше, когда частота NE вращения двигателя меньше.
Блок 250 детектирования минимального значения детектирует минимальное значение величины на форме волны вибрации в четвертой полосе D частот. Блок 260 установки опорного значения устанавливает опорное значение на минимальное значение величины на форме волны вибрации в четвертой полосе D частот. Детектирование минимального значения и установка опорного значения выполняются для каждого цикла зажигания. А именно, в множестве циклов зажигания детектируется минимальное значение и устанавливается опорное значение.
Блок 270 вычисления коэффициента корреляции вычисляет коэффициент K корреляции. Блок 280 вычисления величины детонации вычисляет величину N детонации. Блок 290 определения детонации определяет, что возникла детонация, в случае где величина N детонации больше порогового значения V (J) и коэффициент K корреляции больше порогового значения K (0).
Уравнение (1), описанное выше, может быть преобразовано в:
K=1-Σ ΔS (I)/S (2).
(2).
Уравнение (2) дополнительно может быть преобразовано в:
Σ ΔS (I)/S=1-K (3).
(3).
Поэтому тот факт, что коэффициент K корреляции больше порогового значения K (0), тождественен факту, что Σ ΔS (I) / S меньше 1-K (0).
Ссылаясь на фиг. 12, будет дано описание управляющей структуры программы, выполняемой ECU 200 двигателя, который является устройством определения детонации в данном варианте осуществления. Описанная ниже программа многократно выполняется в заранее определенных циклах (например, для каждого цикла зажигания).
На этапе 100 (в дальнейшем "этап" будет сокращаться как "S") ECU 200 двигателя детектирует угол поворота кривошипа на основе сигнала, отправленного от датчика 306 положения кривошипа.
На этапе S102 ECU 200 двигателя детектирует величину вибрации двигателя 100 совместно с углом поворота кривошипа на основе сигнала, отправленного от датчика 300 детонации.
На этапе S104 ECU 200 двигателя вычисляет интегральное значение 5° путем интегрирования значений выходного напряжения (причем каждое представляет величину вибрации) у датчика 300 детонации для каждого угла поворота кривошипа в 5° (для 5°), чтобы детектировать форму волны вибрации двигателя 100. То есть детектируются синтезированная форма волны в полосах A-C частот с первой по третью и форма волны вибрации в четвертой полосе D частот.
На этапе S106 ECU 200 двигателя детектирует частоту NE вращения двигателя на основе сигнала, отправленного от датчика 306 положения кривошипа. На этапе S108 ECU 200 двигателя устанавливает участок сравнения, где форма волны вибрации и модель формы ударной волны сравниваются друг с другом, чтобы участок сравнения был меньше, когда частота NE вращения двигателя меньше.
На этапе S110 ECU 200 двигателя детектирует минимальное значение величины на форме волны вибрации в четвертой полосе D частот. На этапе S112 ECU 200 двигателя устанавливает опорное значение на минимальное значение величины на форме волны вибрации в четвертой полосе D частот.
На этапе S114 ECU 200 двигателя вычисляет коэффициент K корреляции. На этапе S116 ECU 200 двигателя вычисляет величину N детонации.
На этапе S118 ECU 200 двигателя определяет, больше ли или нет K (0) коэффициент K корреляции и больше ли или нет порогового значения V (J) величина N детонации. Когда коэффициент K корреляции больше порогового значения K (0) и величина N детонации больше V (J) (ДА на этапе S118), процесс переходит к этапу S120. В противном случае (НЕТ на этапе S118) процесс переходит к этапу S124.
На этапе S120 ECU 200 двигателя определяет, что возникла детонация. На этапе S122 ECU 200 двигателя замедляет распределение зажигания [запаздывание].
На этапе S124 ECU 200 двигателя определяет, что детонация не возникла. На этапе S126 ECU 200 двигателя ускоряет распределение зажигания [опережение].
Будет дано описание работы ECU 200 двигателя, который является устройством определения детонации в данном варианте осуществления, на основе вышеописанной структуры и блок-схемы алгоритма.
Пока работает двигатель 100, угол поворота кривошипа детектируется на основе сигнала, отправленного от датчика 306 положения кривошипа (этап S100). На основе сигнала, отправленного от датчика 300 детонации, детектируется величина вибрации двигателя 100 совместно с углом поворота кривошипа (этап S102). Интегральное значение 5° вычисляется для детектирования формы волны вибрации двигателя 100 (этап S104).
Далее, на основе сигнала, отправленного от датчика 306 положения кривошипа, детектируется частота NE вращения двигателя (этап S106). Участок сравнения для сравнения формы волны вибрации с моделью формы ударной волны устанавливается так, чтобы участок был меньше, когда частота NE вращения двигателя меньше (этап S108). Далее детектируется минимальное значение величины на форме волны вибрации в четвертой полосе D частот (этап S110). Опорное значение устанавливается в минимальное значение величины на форме волны вибрации в четвертой полосе D частот (этап S112).
Как показано на фиг. 13, в случае, где частота NE вращения двигателя меньше порогового значения NE (1), сумма значений, каждое из которых определено путем вычитания положительного опорного значения из величины на модели формы ударной волны, используется в качестве площади S модели формы ударной волны, чтобы вычислить коэффициент K корреляции (этап S114).
Таким образом, может быть уменьшено влияние самой величины в модели формы ударной волны на коэффициент K корреляции. Следовательно, влияние разности между величиной на форме волны вибрации и величиной на модели формы ударной волны на коэффициент K корреляции может быть относительно увеличено.
Однако, как показано на фиг. 14, в состоянии, где частота NE вращения двигателя большая, минимальное значение величины на форме волны вибрации в четвертой полосе D частот, а именно опорное значение, может быть сравнительно большим. Таким образом, если сумма значений, каждое из которых определено путем вычитания опорного значения из величины на модели формы ударной волны, используется в качестве площади S модели формы ударной волны, то площадь S может быть меньше требуемой.
Поэтому, как показано на фиг. 15, в случае, где частота NE вращения двигателя не меньше порогового значения NE (1), вся площадь S модели формы ударной волны в участке сравнения используется для вычисления коэффициента K корреляции (этап S114). Таким образом, может быть увеличено влияние площади S в модели формы ударной волны на коэффициент K корреляции. Соответственно, влияние разности между величиной на форме волны вибрации и величиной на модели формы ударной волны на коэффициент K корреляции может быть относительно уменьшено. Следовательно, влияние разности в величине может быть ограничено.
В случае, где частота NE вращения двигателя небольшая, величина изменения угла поворота кривошипа в секунду, например, меньше чем в случае, где частота NE вращения двигателя большая. В отличие от этого период времени, в котором возникает вибрация из-за детонации, является практически постоянным независимо от частоты NE вращения двигателя.
Поэтому, как показано на фиг. 16, интервал угла поворота кривошипа, в котором детектируется вибрация из-за детонации, короче в случае, где частота NE вращения двигателя небольшая, чем в случае, где частота NE вращения двигателя большая. Соответственно, в данном варианте осуществления коэффициент K корреляции вычисляется на основе значения, определенного путем суммирования разностей между соответствующими величинами на форме волны вибрации и соответствующими величинами на модели формы ударной волны в участке сравнения, который определяется таким образом, чтобы участок сравнения был меньше, когда частота NE вращения двигателя меньше. Таким образом, из участка, в котором используется разность между формой волны вибрации и моделью формы ударной волны, может быть удален участок, где вибрация из-за детонации вряд ли возникает.
В дополнение к коэффициенту K корреляции сумма величин синтезированной формы волны в полосах A-C частот с первой по третью используется для вычисления величины N детонации (этап S116).
Когда коэффициент K корреляции больше порогового значения K (0) и величина N детонации больше порогового значения V (J) (ДА на этапе S118), определяется, что возникла детонация (этап S120). В этом случае распределение зажигания замедляется (этап S122).
В отличие от этого, когда коэффициент K корреляции не превышает порогового значения K (0) или величина N детонации не превышает порогового значения V (J) (НЕТ на этапе S118), определяется, что детонация не возникла (этап S124). В этом случае распределение зажигания ускоряется (этап S126).
Как описано выше, когда частота NE вращения двигателя меньше порогового значения NE (1), ECU двигателя, который является устройством определения детонации в данном варианте осуществления, использует сумму значений, каждое из которых определено путем вычитания положительного опорного значения из величины на модели формы ударной волны, в качестве площади S модели формы ударной волны, чтобы вычислить коэффициент K корреляции. Таким образом, может быть уменьшено влияние самой величины в модели формы ударной волны на коэффициент K корреляции. Следовательно, влияние разности между величиной на форме волны вибрации и величиной на модели формы ударной волны на коэффициент K корреляции может быть относительно увеличено. Этот коэффициент K корреляции используется для определения, возникла или нет детонация. Таким образом, можно безошибочно определить, что детонация не возникла в случае, где разность между соответствующими величинами на форме волны вибрации и модели формы волны небольшая, независимо от того, что детонация не возникла. В отличие от этого в случае, где частота NE вращения двигателя не меньше порогового значения NE (1), вся площадь S модели формы ударной волны в участке сравнения используется для вычисления коэффициента K корреляции. Таким образом, влияние разности между соответствующими величинами на форме волны вибрации и модели формы ударной волны на коэффициент K корреляции может быть относительно уменьшено. Соответственно, может быть ограничено влияние разности между соответствующими величинами на форме волны вибрации и модели формы ударной волны на коэффициент K корреляции. Следовательно, можно точно определить, возникла или нет детонация.
Второй вариант осуществления
Ниже будет описываться второй вариант осуществления настоящего изобретения. Данный вариант осуществления отличается от описанного выше первого варианта осуществления в том, что опорное значение устанавливается на основе частотного распределения минимальных значений форм волн вибрации. Другие признаки, например конфигурация двигателя 100, идентичны таковым в первом варианте осуществления, и с тем же успехом они одинаково функционируют. Поэтому их подробное описание здесь не будет повторяться.
Ссылаясь на фиг. 17, будет дано описание функций ECU 200 двигателя, который является устройством определения детонации в данном варианте осуществления. Описанные ниже функции могут быть реализованы посредством программного обеспечения или реализованы посредством аппаратных средств. Одинаковые функции данного варианта осуществления и первого варианта осуществления обозначаются одинаковой цифрой. Поэтому их подробное описание здесь не будет повторяться.
В данном варианте осуществления блок 262 установки опорного значения устанавливает опорное значение на основе частотного распределения минимальных значений величины на формах волн вибрации в четвертой полосе D частот. Как показано на фиг. 18, опорное значение устанавливается в значение, определенное путем прибавления произведения стандартного отклонения минимальных значений и коэффициента к медиане минимальных значений. Коэффициент равен, например, "2". Минимальные значения, используемые для установки опорного значения, являются, например, соответствующими минимальными значениями в 200 циклах зажигания. Когда устанавливается опорное значение, минимальные значения подвергаются логарифмическому преобразованию для использования. Поэтому опорное значение, которое устанавливается с использованием частотного распределения, подвергается обратному логарифмическому преобразованию для использования.
Ссылаясь на фиг. 19, будет дано описание управляющей структуры программы, выполняемой ECU 200 двигателя, который является устройством определения детонации в данном варианте осуществления. Такой же этап процесса, как у первого варианта осуществления, обозначается одинаковым номером этапа. Поэтому их подробное описание здесь не будет повторяться.
На этапе S200 ECU 200 двигателя устанавливает опорное значение на значение, определенное путем прибавления произведения стандартного отклонения минимальных значений и коэффициента к медиане минимальных значений. Таким образом, с тем же успехом могут достигаться результаты, аналогичные таковым у первого варианта осуществления.
Третий вариант осуществления
Ниже будет описываться третий вариант осуществления настоящего изобретения. Данный вариант осуществления отличается от описанного выше второго варианта осуществления в том, что опорное значение ограничивается заранее определенным значением или меньше. Другие признаки, например сама конфигурация двигателя 100, идентичны таковым в описанном выше первом варианте осуществления. С тем же успехом они одинаково функционируют. Поэтому их подробное описание здесь не будет повторяться.
Ссылаясь на фиг. 20, будет дано описание функций ECU 200 двигателя, который является устройством определения детонации в данном варианте осуществления. Описанные ниже функции могут быть реализованы посредством программного обеспечения или реализованы посредством аппаратных средств. Одинаковые функции данного варианта осуществления и вышеописанного первого или второго варианта осуществления обозначаются одинаковой цифрой, и их подробное описание здесь не будет повторяться.
ECU 200 двигателя дополнительно включает в себя ограничивающий блок 264. Ограничивающий блок 264 ограничивает опорное значение верхним пределом или меньше. Верхний предел, например, в два раза больше медианы минимальных значений. Этим верхний предел не ограничивается. В качестве альтернативы верхний предел может быть установлен постоянным значением.
Ссылаясь на фиг. 21, будет дано описание управляющей структуры программы, выполняемой ECU 200 двигателя, который является устройством определения детонации в данном варианте осуществления. Такой же этап процесса, как в вышеописанном первом или втором варианте осуществления, обозначается одинаковым номером этапа, и его подробное описание здесь не будет повторяться.
На этапе S300 ECU 200 двигателя определяет, равно ли или меньше или нет верхнего предела опорное значение. Когда опорное значение равно или меньше верхнего предела (ДА на этапе S300), процесс переходит к этапу S114. В противном случае (НЕТ на этапе S300) процесс переходит к этапу S302. На этапе S302 ECU 200 двигателя устанавливает опорное значение в верхний предел. Таким образом, могут быть достигнуты результаты, аналогичные вышеописанному первому варианту осуществления.
Четвертый вариант осуществления
Ниже будет описываться четвертый вариант осуществления настоящего изобретения. Данный вариант осуществления отличается от вышеописанного первого варианта осуществления в том, что опорное значение устанавливается в среднее значение минимальной величины на форме волны вибрации и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором минимальная величина присутствует на форме волны вибрации. Другие признаки, например сама конфигурация двигателя 100, идентичны таковым в описанном выше первом варианте осуществления. С тем же успехом они одинаково функционируют. Поэтому их подробное описание здесь не будет повторяться.
Ссылаясь на фиг. 22, будут описываться функции ECU 200 двигателя, который является устройством определения детонации в данном варианте осуществления. Описанные ниже функции могут быть реализованы посредством программного обеспечения или реализованы посредством аппаратных средств. Любая функция, идентичная таковой в вышеописанном первом варианте осуществления, обозначается одинаковой цифрой, и ее подробное описание здесь не будет повторяться.
В данном варианте осуществления блок 266 установки опорного значения вычисляет, как показано на фиг. 23, среднее значение минимального значения величины (интегральное значение 5°) на форме волны вибрации в четвертой полосе D частот и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором величина имеет минимальное значение на форме волны вибрации. Например, среднее значение вычисляется путем деления интегрального значения 5°, соответствующего углу поворота кривошипа в 15°, на "3". Далее блок 266 установки опорного значения устанавливает опорное значение на вычисленное среднее значение. Вычисление среднего значения и установка опорного значения выполняются в каждом цикле зажигания. А именно, в множестве циклов зажигания вычисляется среднее значение и устанавливается опорное значение.
Ссылаясь на фиг. 24, будет дано описание управляющей структуры программы, выполняемой ECU 200 двигателя, который является устройством определения детонации в данном варианте осуществления. Любой этап, идентичный таковому в вышеописанном первом варианте осуществления, обозначается одинаковым номером этапа. Поэтому их подробное описание здесь не будет повторяться.
На этапе S400 ECU 200 двигателя вычисляет среднее значение минимального значения величины (интегральное значение 5°) на форме волны вибрации в четвертой полосе D частот и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором величина имеет минимальное значение на форме волны вибрации. На этапе S402 ECU 200 двигателя устанавливает опорное значение на вычисленное среднее значение. Таким образом, с тем же успехом могут быть достигнуты результаты, аналогичные вышеописанному первому варианту осуществления.
Пятый вариант осуществления
Ниже будет описываться пятый вариант осуществления настоящего изобретения. Данный вариант осуществления отличается от вышеописанного четвертого варианта осуществления в том, что опорное значение устанавливается на основе частотного распределения средних значений величины (интегральное значение 5°). Другие признаки, например сама конфигурация двигателя 100, идентичны таковым в описанном выше первом варианте осуществления. Соответствующие функции также являются идентичными. Поэтому их подробное описание здесь не будет повторяться.
Ссылаясь на фиг. 25, будет дано описание функций ECU 200 двигателя, который является устройством определения детонации в данном варианте осуществления. Описанные ниже функции могут быть реализованы посредством программного обеспечения или реализованы посредством аппаратных средств. Здесь любая функция, идентичная таковой в вышеописанном первом или четвертом варианте осуществления, обозначается одинаковой цифрой. Поэтому их подробное описание здесь не будет повторяться.
В данном варианте осуществления блок 268 установки опорного значения вычисляет среднее значение минимального значения величины (интегральное значение 5°) на форме волны вибрации в четвертой полосе D частот и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором величина имеет минимальное значение на форме волны вибрации. Далее блок 268 установки опорного значения устанавливает опорное значение на значение, определенное путем прибавления произведения стандартного отклонения вычисленных средних значений и коэффициента к медиане вычисленных средних значений. Коэффициент равен, например, "2". Средние значения, используемые для установки опорного значения, относятся к соответствующим средним значениям, например, в 200 циклах зажигания. Когда устанавливается опорное значение, среднее значение подвергается логарифмическому преобразованию для использования. Поэтому опорное значение, которое устанавливается с использованием частотного распределения, подвергается обратному логарифмическому преобразованию для использования.
Ссылаясь на фиг. 27, будет дано описание управляющей структуры программы, выполняемой ECU 200 двигателя, который является устройством определения детонации в данном варианте осуществления. Здесь одинаковые этапы процесса в данном варианте осуществления и в вышеописанном первом или четвертом варианте осуществления обозначаются одинаковым номером этапа. Поэтому их подробное описание здесь не будет повторяться.
На этапе S500 ECU 200 двигателя устанавливает опорное значение на значение, определенное путем прибавления произведения стандартного отклонения средних значений и коэффициента к медиане средних значений. Таким образом, с тем же успехом могут достигаться результаты, аналогичные таковым у первого варианта осуществления.
Другие варианты осуществления
Постоянное значение может использоваться в качестве опорного значения. Кроме того, как показано на фиг. 28, участок сравнения может быть установлен так, что угол поворота кривошипа, при котором величина имеет максимальное значение, находится вне участка сравнения.
Нужно подразумевать, что раскрытые выше варианты осуществления наличествуют в качестве иллюстрации во всех отношениях, а не в качестве ограничения. Подразумевается, что объем настоящего изобретения определяется формулой изобретения, а не описанием выше, и включает в себя все модификации и вариации, эквивалентные по смыслу и объему формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДЕТОНАЦИИ И СПОСОБ ОПРЕДЕЛЕНИЯ ДЕТОНАЦИИ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2008 |
|
RU2424497C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДЕТОНАЦИИ | 2008 |
|
RU2431816C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ И СПОСОБ УПРАВЛЕНИЯ | 2014 |
|
RU2618146C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2018 |
|
RU2674294C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2014 |
|
RU2629560C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАЗРЯДКОЙ ДЛЯ ВТОРИЧНОЙ БАТАРЕИ | 2009 |
|
RU2475919C2 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ НАГРУЗКИ, ТРАНСПОРТНОЕ СРЕДСТВО, ВКЛЮЧАЮЩЕЕ В СЕБЯ ЕГО, И СПОСОБ УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА ПРИВЕДЕНИЯ В ДВИЖЕНИЕ НАГРУЗКИ | 2007 |
|
RU2402444C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2690296C1 |
| Устройство управления двигателем внутреннего сгорания и способ управления двигателем внетреннего сгорания | 2015 |
|
RU2656867C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2013 |
|
RU2628113C2 |

Изобретение относится к области транспорта и может быть использовано для определения детонации двигателя внутреннего сгорания на основе формы волны вибрации двигателя внутреннего сгорания. Техническим результатом является создания устройства и способа определения детонации, с помощью которого можно точно определить возникла или нет детонация. Электронный блок управления (ECU) двигателя выполняет программу, включающую в себя этапы: детектирования величины вибрации двигателя (этап S102); детектирования формы волны вибрации двигателя на основе величины (этап S104); вычисления коэффициента К корреляции в случае, где частота NE вращения двигателя меньше порогового значения NE (1), с использованием суммы значений, каждое из которых определено путем вычитания положительного опорного значения из величины в модели формы ударной волны, в качестве площади S модели формы ударной волны, и вычисления коэффициента К корреляции в случае, где частота NE вращения двигателя не меньше порогового значения NE (1), с использованием площади S всей модели формы ударной волны (этап S114); и определения, возникла или нет детонация, с использованием коэффициента К корреляции (этапы S120, S124). Коэффициент К корреляции вычисляется путем деления на площадь S суммы разностей, каждая из которых является разностью между величиной на форме волны вибрации и величиной на модели формы ударной волны. 3 н. и 21 з.п. ф-лы, 28 ил.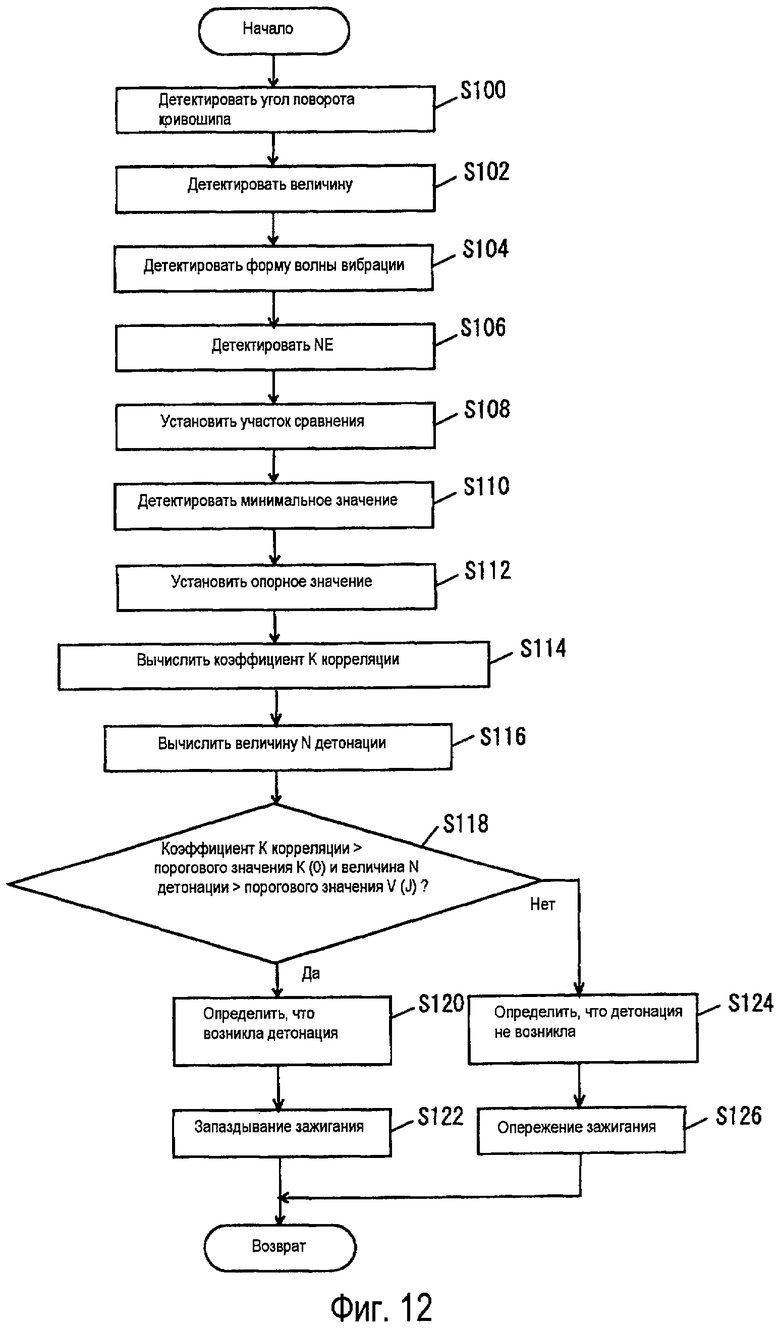
1. Устройство определения детонации для двигателя внутреннего сгорания, содержащее:
датчик (306) положения кривошипа, детектирующий угол поворота кривошипа упомянутого двигателя (100) внутреннего сгорания;
датчик (300) детонации, детектирующий величину вибрации упомянутого двигателя (100) внутреннего сгорания, причем упомянутая величина связана с углом поворота кривошипа; и
операционный блок (200),
причем упомянутый операционный блок (200) детектирует форму волны вибрации в первом интервале угла поворота кривошипа на основе величины вибрации упомянутого двигателя (100) внутреннего сгорания,
упомянутый операционный блок (200) вычисляет первое значение на основе разности между величиной на упомянутой детектированной форме волны и величиной на модели формы волны, определенной заранее в качестве опорной формы волны вибрации упомянутого двигателя (100) внутреннего сгорания, во втором интервале угла поворота кривошипа,
упомянутый операционный блок (200) вычисляет второе значение так, что второе значение меньше, когда количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания меньше,
упомянутый операционный блок (200) вычисляет третье значение на основе упомянутого первого значения и упомянутого второго значения, и упомянутый операционный блок (200) определяет, возникла или нет детонация в упомянутом двигателе (100) внутреннего сгорания, на основе упомянутого третьего значения,
при этом упомянутый операционный блок (200) вычисляет упомянутое первое значение путем суммирования разностей, каждая из которых является разностью между величиной на упомянутой детектированной форме волны и величиной на упомянутой модели формы волны в упомянутом втором интервале,
в случае, где количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания является первым количеством оборотов, упомянутый операционный блок (200) вычисляет упомянутое второе значение путем суммирования значений, каждое из которых определено путем вычитания положительного опорного значения из величины на упомянутой модели формы волны, в упомянутом втором интервале, и в случае, где количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания является вторым количеством оборотов, большим упомянутого первого количества оборотов, упомянутый операционный блок (200) вычисляет упомянутое второе значение путем суммирования величин на упомянутой модели формы волны в упомянутом втором интервале,
упомянутый операционный блок (200) вычисляет упомянутое третье значение путем деления упомянутого первого значения на упомянутое второе значение, и
в случае, где упомянутое третье значение меньше заранее определенного значения, упомянутый операционный блок (200) определяет, что возникла детонация в упомянутом двигателе (100) внутреннего сгорания.
2. Устройство определения детонации для двигателя внутреннего сгорания по п.1, в котором упомянутый операционный блок (200) устанавливает упомянутый второй интервал так, что упомянутый второй интервал меньше, когда количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания меньше.
3. Устройство определения детонации для двигателя внутреннего сгорания по п.1, в котором
упомянутый операционный блок (200) детектирует минимальное значение величины на упомянутой детектированной форме волны, и
упомянутый операционный блок (200) устанавливает упомянутое опорное значение на минимальное значение величины на упомянутой детектированной форме волны.
4. Устройство определения детонации для двигателя внутреннего сгорания по п.1, в котором
упомянутый операционный блок (200) детектирует соответствующие минимальные значения величины во множестве циклов зажигания, причем каждое из упомянутых минимальных значений является минимальным значением величины на упомянутой детектированной форме волны, и
упомянутый операционный блок (200) устанавливает упомянутое опорное значение на значение, определенное путем прибавления произведения стандартного отклонения упомянутых минимальных значений и коэффициента к медиане упомянутых минимальных значений.
5. Устройство определения детонации для двигателя внутреннего сгорания по п.4, в котором
упомянутый операционный блок (200) ограничивает упомянутое опорное значение не более чем заранее определенным значением.
6. Устройство определения детонации для двигателя внутреннего сгорания по п.1, в котором
упомянутый операционный блок (200) вычисляет среднее значение минимального значения величины на упомянутой детектированной форме волны и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором упомянутое минимальное значение величины присутствует на упомянутой детектированной форме волны, и
упомянутый операционный блок (200) устанавливает упомянутое опорное значение на упомянутое среднее значение.
7. Устройство определения детонации для двигателя внутреннего сгорания по п.1, в котором
упомянутый операционный блок (200) вычисляет соответствующие средние значения во множестве циклов зажигания, причем каждое из упомянутых средних значений является средним значением минимального значения величины на упомянутой детектированной форме волны и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором упомянутое минимальное значение величины присутствует на упомянутой детектированной форме волны, и
упомянутый операционный блок (200) устанавливает упомянутое опорное значение на значение, определенное путем прибавления произведения стандартного отклонения упомянутых средних значений и коэффициента к медиане упомянутых средних значений.
8. Устройство определения детонации для двигателя внутреннего сгорания по п.1, в котором
упомянутое опорное значение является постоянным значением.
9. Способ определения детонации для двигателя внутреннего сгорания, содержащий этапы, на которых:
детектируют угол поворота кривошипа упомянутого двигателя (100) внутреннего сгорания;
детектируют величину вибрации упомянутого двигателя (100) внутреннего сгорания, причем упомянутая величина связана с углом поворота кривошипа;
детектируют форму волны вибрации в первом интервале угла поворота кривошипа на основе величины вибрации упомянутого двигателя (100) внутреннего сгорания;
вычисляют первое значение на основе разности между величиной на упомянутой детектированной форме волны и величиной на модели формы волны, определенной заранее в качестве опорной формы волны вибрации упомянутого двигателя (100) внутреннего сгорания, во втором интервале угла поворота кривошипа;
вычисляют второе значение так, что второе значение меньше, когда количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания меньше;
вычисляют третье значение на основе упомянутого первого значения и упомянутого второго значения; и
определяют, возникла или нет детонация в упомянутом двигателе (100) внутреннего сгорания, на основе упомянутого третьего значения,
при этом упомянутый этап вычисления первого значения включает в себя этап вычисления упомянутого первого значения путем суммирования разностей, каждая из которых является разностью между величиной на упомянутой детектированной форме волны и величиной на упомянутой модели формы волны в упомянутом втором интервале,
упомянутый этап вычисления второго значения включает в себя этап вычисления упомянутого второго значения путем суммирования значений, каждое из которых определено путем вычитания положительного опорного значения из величины на упомянутой модели формы волны в упомянутом втором интервале, в случае, где количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания является первым количеством оборотов, и вычисления упомянутого второго значения путем суммирования величин на упомянутой модели формы волны в упомянутом втором интервале в случае, где количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания является вторым количеством оборотов, большим упомянутого первого количества оборотов,
упомянутый этап вычисления третьего значения включает в себя этап вычисления упомянутого третьего значения путем деления упомянутого первого значения на упомянутое второе значение, и упомянутый этап определения возникла или нет детонация включает в себя этап определения, что детонация возникла в упомянутом двигателе (100) внутреннего сгорания в случае, где упомянутое третье значение меньше заранее определенного значения.
10. Способ определения детонации для двигателя внутреннего сгорания по п.9, дополнительно содержащий этап установки упомянутого второго интервала так, что упомянутый второй интервал меньше, когда количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания меньше.
11. Способ определения детонации для двигателя внутреннего сгорания по п.9, дополнительно содержащий этапы, на которых:
детектируют минимальное значение величины на упомянутой детектированной форме волны; и
устанавливают упомянутое опорное значение на минимальное значение величины на упомянутой детектированной форме волны.
12. Способ определения детонации для двигателя внутреннего сгорания по п.9, дополнительно содержащий этапы, на которых:
детектируют соответствующие минимальные значения величины во множестве циклов зажигания, причем каждое из упомянутых минимальных значений является минимальным значением величины на упомянутой детектированной форме волны; и
устанавливают упомянутое опорное значение на значение, определенное путем прибавления произведения стандартного отклонения упомянутых минимальных значений и коэффициента к медиане упомянутых минимальных значений.
13. Способ определения детонации для двигателя внутреннего сгорания по п.12, дополнительно содержащий этап ограничения упомянутого опорного значения не более чем заранее определенным значением.
14. Способ определения детонации для двигателя внутреннего сгорания по п.9, дополнительно содержащий этапы, на которых: вычисляют среднее значение минимального значения величины на упомянутой детектированной форме волны и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором упомянутое минимальное значение величины присутствует на упомянутой детектированной форме волны; и
устанавливают упомянутое опорное значение на упомянутое среднее значение.
15. Способ определения детонации для двигателя внутреннего сгорания по п.9, дополнительно содержащий этапы, на которых:
вычисляют соответствующие средние значения во множестве циклов зажигания, причем каждое из упомянутых средних значений является средним значением минимального значения величины на упомянутой детектированной форме волны и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором упомянутое минимальное значение величины присутствует на упомянутой детектированной форме волны; и
устанавливают упомянутое опорное значение на значение, определенное путем прибавления произведения стандартного отклонения упомянутых средних значений и коэффициента к медиане упомянутых средних значений.
16. Способ определения детонации для двигателя внутреннего сгорания по п.9, в котором
упомянутое опорное значение является постоянным значением.
17. Устройство определения детонации для двигателя внутреннего сгорания, содержащее:
средство (306) для детектирования угла поворота кривошипа упомянутого двигателя (100) внутреннего сгорания;
средство (300) для детектирования величины вибрации упомянутого двигателя (100) внутреннего сгорания, причем упомянутая величина связана с углом поворота кривошипа;
средство (200) для детектирования формы волны вибрации в первом интервале угла поворота кривошипа на основе величины вибрации упомянутого двигателя (100) внутреннего сгорания;
первое средство (200) вычисления для вычисления первого значения на основе разности между величиной на упомянутой детектированной форме волны и величиной на модели формы волны, определенной заранее в качестве опорной формы волны вибрации упомянутого двигателя (100) внутреннего сгорания, во втором интервале угла поворота кривошипа;
второе средство (200) вычисления для вычисления второго значения так, что второе значение меньше, когда количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания меньше;
третье средство (200) вычисления для вычисления третьего значения на основе упомянутого первого значения и упомянутого второго значения; и
средство (200) определения для определения, возникла или нет детонация в упомянутом двигателе (100) внутреннего сгорания, на основе упомянутого третьего значения,
при этом упомянутое первое средство (200) вычисления включает в себя средство для вычисления упомянутого первого значения путем суммирования разностей, каждая из которых является разностью между величиной на упомянутой детектированной форме волны и величиной на упомянутой модели формы волны, в упомянутом втором интервале,
упомянутое второе средство (200) вычисления включает в себя средство для вычисления упомянутого второго значения путем суммирования значений, каждое из которых определено путем вычитания положительного опорного значения из величины на упомянутой модели формы волны, в упомянутом втором интервале, в случае, где количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания является первым количеством оборотов, и вычисления упомянутого второго значения путем суммирования величин на упомянутой модели формы волны в упомянутом втором интервале, в случае, где количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания является вторым количеством оборотов, большим упомянутого первого количества оборотов,
упомянутое третье средство (200) вычисления включает в себя средство для вычисления упомянутого третьего значения путем деления упомянутого первого значения на упомянутое второе значение, и
упомянутое средство (200) определения включает в себя средство для определения, что детонация возникла в упомянутом двигателе (100) внутреннего сгорания в случае, где упомянутое третье значение меньше заранее определенного значения.
18. Устройство определения детонации для двигателя внутреннего сгорания по п.17, дополнительно содержащее средство (200) для установки упомянутого второго интервала так, что упомянутый второй интервал меньше, когда количество оборотов выходного вала упомянутого двигателя (100) внутреннего сгорания меньше.
19. Устройство определения детонации для двигателя внутреннего сгорания по п.17, дополнительно содержащее:
средство (200) для детектирования минимального значения величины на упомянутой детектированной форме волны; и
средство (200) для установки упомянутого опорного значения на минимальное значение величины на упомянутой детектированной форме волны.
20. Устройство определения детонации для двигателя внутреннего сгорания по п.17, дополнительно содержащее:
средство (200) для детектирования соответствующих минимальных значений величины во множестве циклов зажигания, причем каждое из упомянутых минимальных значений является минимальным значением величины на упомянутой детектированной форме волны; и
средство (200) для установки упомянутого опорного значения на значение, определенное путем прибавления произведения стандартного отклонения упомянутых минимальных значений и коэффициента к медиане упомянутых минимальных значений.
21. Устройство определения детонации для двигателя внутреннего сгорания по п.20, дополнительно содержащее средство (200) для ограничения упомянутого опорного значения не более чем заранее определенным значением.
22. Устройство определения детонации для двигателя внутреннего сгорания по п.17, дополнительно содержащее:
средство (200) для вычисления среднего значения минимального значения величины на упомянутой детектированной форме волны и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором упомянутое минимальное значение величины присутствует на упомянутой детектированной форме волны; и
средство (200) для установки упомянутого опорного значения на упомянутое среднее значение.
23. Устройство определения детонации для двигателя внутреннего сгорания по п.17, дополнительно содержащее:
средство (200) для вычисления соответствующих средних значений во множестве циклов зажигания, причем каждое из упомянутых средних значений является средним значением минимального значения величины на упомянутой детектированной форме волны и величины на угле поворота кривошипа, прилегающем к углу поворота кривошипа, при котором упомянутое минимальное значение величины присутствует на упомянутой детектированной форме волны; и
средство (200) для установки упомянутого опорного значения на значение, определенное путем прибавления произведения стандартного отклонения упомянутых средних значений и коэффициента к медиане упомянутых средних значений.
24. Устройство определения детонации для двигателя внутреннего сгорания по п.17, в котором упомянутое опорное значение является постоянным значением.

