Изобретение относится к навигационному приборостроению, а точнее к методам девиацнонных работ с магнитными компасами5 установленньши на транспортном средстве, например, с авиационнглми. или морскими компасами.
Цель изобретения - повышение производительности труда путем исключения эталонных средств измерений.
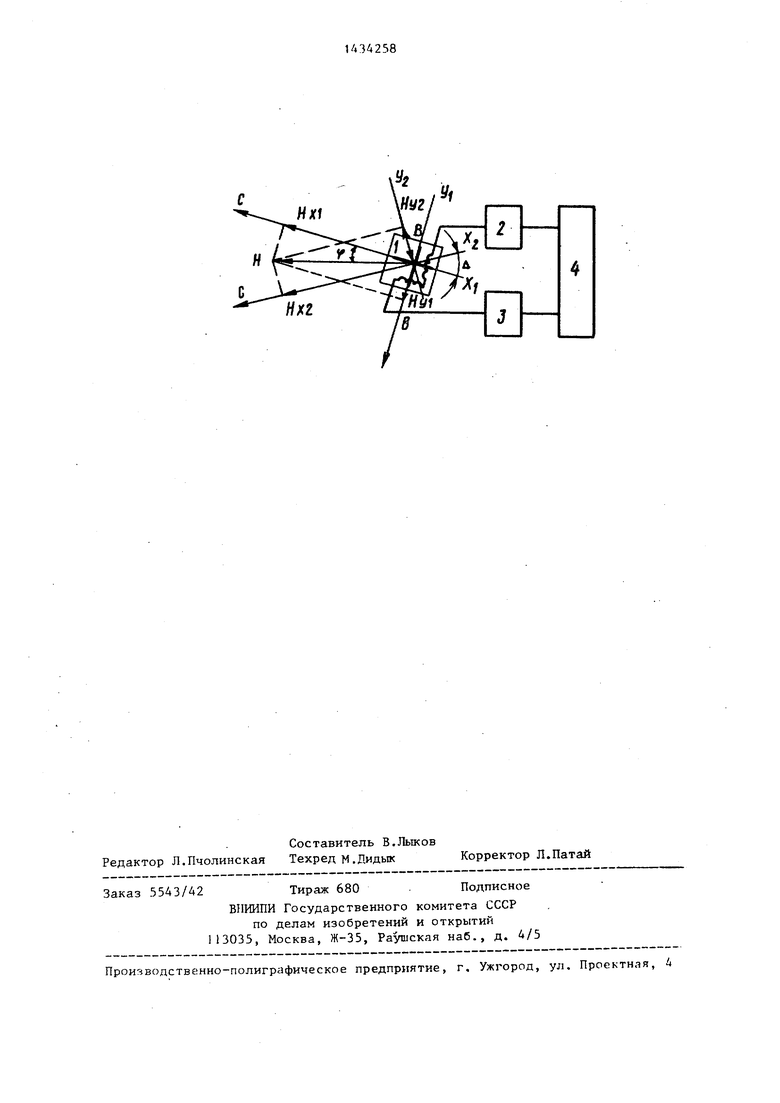
Сущность способа поясняется чертежом .
На чертеже показан -, датчик 1 магнитного курса маятникового типа с двумя взаимно перпендикулярными чув- ствительными элементами (магнитомет- pat-ni) , которые при установке датчика на транспортном средстве ориентируются вдоль осей X и Y транспортного средства соответственно вольтметры 2 и Зз вычислительное устройство 4, вектор индукдии Н горизонтальной составляющей МПЗ, магнитный курс cf транспортного средства, угол разворота и транспортного средства про- акции К на чувствительные эйементы датчика Н у. , Н у( , ориентированные вдоль осей X и Y соответственно при курсовом угле tf, проекции Н на чувствительные элементы датчика Н,(-,,Н после разворота -транспортного средства на угол ; проекции В и С вектора индукции магнитного поля транспортного средства на оси X и Y, соот зетств уюише одноименным коэффициентам полукруговой девиации,
Огфеделение полукрз говой девиации производится с учетом того, что четвертая девиация5 вызванная влиянием мягкого железа, заблаговременно устраняется: или достаточно мала.
Способ осуществляется следуго1чим образом,
Измеряют составляющие суммарного махч итного поля на оси координат при любом положении транспортного средст ва. Изменяют курс транспортного сред ства на угол, при котором результаты измерений на ось X одинаковы, а на ось У - различны. Определяют коэффициент полз/круговой девиации В как полусумму результатов измерений на ось У до и после разворота транспортного средства
В
Hj, 2
Аналогично определяют коэффициент полукруговой девиации С, для этого
разворачивают транспортное средство на угол, при котором результаты измерений на ось Y одинаковы, а на ось X - различны.Определяют коэффициент полукруговой девиации С как полусумму результатов измерений на ось X до и после разворота транспортного сред- ства
o
д 5
0
5
0
5
0
5
Н
Н
х+
2
Полученные коэффициенты вводят в вычислительное устройство, осуществляющее операции запоминания, сравнения и суммирования результатов измерений.
Компенсация коэффициентов полукруговой девиации производится любым известным способом, например пропусканием по обмотке датчика постоянного тока или запоминанием найденных .значений коэффициентов с последующим их вычитанием из результатов измерений .
Формула изобретения
.Способ определения полукруговой девиации, включающий измерение проекции вектора магнитного по.ля на горизонтальные оси связанной с транспортным средством прямоугольной системы коордг нат и определение проекции вектора магнитного поля транспортного средства на одну из осей координат как полусуммы результатов измерения проекции магнитного поля на эту ось координат до и после разворота транспортного средства, отличающийся тем, что, с целью повыше- .ния производительности за счет исключения эталонных измерений, разворачивают транспортное средство на угол, при котором результаты изьгерений проекции магнитного поля на первую ось координат одинаковы, а на вторую ось - разл1 чны и по результатам измерений проекций на вторую ось координат определяют величину проекции вектора магнитного поля транспортного средства на эту ось координат, разворачивают транспортное средство на угол, при котором результаты 7.1змерений проекций магнитного поля на вторую ось координат одинаковы, а на первую ось - различны и по результатам измерений проекций на первую ось определяют величину проекции магнитного поля транспортного сре,чства на первую ось координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УНИЧТОЖЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ НА ОДНОМ МАГНИТНОМ КУРСЕ | 2010 |
|
RU2442961C1 |
| Способ определения полукруговой девиации | 1986 |
|
SU1362931A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2022 |
|
RU2796372C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1996 |
|
RU2108546C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2008 |
|
RU2365877C1 |
| ЭЛЕКТРОННЫЙ МАГНИТНЫЙ КОМПАС | 2006 |
|
RU2331843C2 |
| СПОСОБ ЦИФРОВОЙ КОМПЕНСАЦИИ ЭЛЕКТРОМАГНИТНОЙ ДЕВИАЦИИ ДЛЯ МАГНИТНОГО ЭЛЕКТРОННОГО КОМПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210060C2 |
| Способ определения полукруговой девиации | 1979 |
|
SU778450A1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
Изобретение относится к навигационному приборостроению и предназначено для устранения полукруговой девиации магнитных компасов. Целью изобретения является по ьшение производительности. Измеряют составляющие магнитного поля на оси, связанной с транспортным средством системы прямоугольных координат. Осуществляют разворот транспортного средства на угол, при котором результаты измерений проекции магнитного поля на первую ось координат одинаковы, а на вторую - различные. Определяют коэффициент полукруговой девиации как полусумму результатов измерений проекций на вторую ось до и после разворота. Разворачивают Транспортное средство на угол, при котором результаты измерений проекции магнитного поля на вторую ось одинаковы, а на первую - различны. Определяют коэффициент полу- g круговой девиации как пoлycyм fy результатов измерений проекций на первую ось. 1 ил.
| Способ определения полукруговой девиации | 1986 |
|
SU1362931A1 |
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
