Область техники, к которой относится изобретение
Изобретение относится к области радиоэлектроники и может быть использовано для приема навигационных сигналов, в частности GPS и ГЛОНАСС.
Уровень техники
Одной из задач, решаемых приемником спутниковых навигационных сигналов, является поиск и обнаружение этих сигналов. При этом их уровень мощности может быть весьма низким вследствие экранирующих свойств местности (горные и лесные массивы), а также в условиях плотной, многоэтажной городской застройки, в тоннелях, под мостами, эстакадами или внутри зданий. Основным методом поиска спутниковых навигационных сигналов является корреляционный метод, который заключается в перемножении принятого сигнала с его известной с точностью до набора параметров копией и последующем интегрировании (суммировании с накоплением) данного произведения. Далее результат интегрирования сравнивается с порогом и, если порог превышается, то принимается решение о наличии спутникового навигационного сигнала. При этом чувствительность такого приемника тем выше, чем больше время накопления. Структура спутниковых навигационных сигналов GPS такова, что длительность одного информационного бита составляет 20 мс, при этом он представляет собой повторенную 20 раз одну и ту же уникальную для каждого спутника псевдослучайную последовательность (кодовое слово или «эпоха») длительностью 1 мс. Структура спутниковых навигационных сигналов ГЛОНАСС аналогична структуре спутниковых навигационных сигналов GPS с тем отличием, что одно и то же кодовое слово длительностью 1 мс сначала повторяется 10 раз, затем инвертируется и еще повторяется 10 раз; при этом сигналы от разных спутников передаются на разных частотах. Для передачи информации используется двоичная фазовая модуляция с изменением фазы на границе бита на 180°. Наиболее простым с точки зрения реализации способом поиска является суммирование квадратов корреляций, соответствующих 1 мс интервалу. Данный способ накопления называется некогерентным и обладает наименьшей чувствительностью. Более совершенный способ, называемый когерентным, использует поэлементное сложение комплексных отчетов. При этом из-за особенности структуры GPS и ГЛОНАСС сигналов, необходимо ограничиться накоплением на интервале не более 20 или 10 мс для GPS и ГЛОНАСС соответственно, и, кроме того, необходимо знать положение границы информационного бита. Поскольку в процессе поиска положение границы бита неизвестно, то приемник должен
- либо уменьшать интервал накопления, что снижает чувствительность;
- либо каким-то образом оценивать положение границы бита, что затруднительно при слабом сигнале;
- либо получать положение границы бита от какого-либо внешнего источника информации (например, из сети сотовой подвижной связи), что делает работу приемника зависимой от этого источника. В настоящее время подобный сервис реализован только в системе сотовой связи cdma2000 и требует от базовой станции и приемника поддержки специального протокола физического уровня;
- либо выполнять несколько накоплений с длиной до 20 (10) мс и со смещенными относительно друг друга моментами начала накопления.
Для максимальной эффективности поиска необходимо иметь 20 (10) вариантов накопления со смещением в 1 мс (длина кодового слова). Однако этот способ ведет к резкому увеличению требуемых вычислительных ресурсов и памяти приемника. Для дальнейшего повышения чувствительности приемника необходимо увеличить время накопления сверх 20 (10) мс. В этом случае при использовании когерентного накопления необходимо знать не только положение границы информационного бита, но и сами значения информационных бит (другими словами, необходимо знать наличие или отсутствие инверсии фазы на границе бита). Если эти значения известны, то время накопления можно увеличить до длины нескольких информационных бит. Однако практически, особенно в условиях слабого сигнала, приемник не может самостоятельно определить значения информационных бит с высокой степенью надежности. Поэтому приемник должен предполагать все возможные варианты значений информационных бит и соответственно выполнять различные варианты накоплений. Очевидно, что это ведет к экспоненциальному росту требуемых вычислительных ресурсов и объема памяти приемника. Другим способом повышения чувствительности является сочетание когерентного и некогерентного накоплений. При этом когерентное накопление используется на длине одного информационного бита, далее результат накопления возводится в квадрат, чтобы избавиться от влияния знака информационного бита. Далее когерентное накопление используется на длине следующего информационного бита, результат накопления опять возводится в квадрат и так на протяжении требуемого количества информационных бит. Преимуществом смешанного когерентно-некогерентного способа накопления по сравнению с когерентным способом является отсутствие необходимости знания значений информационных бит, что позволяет экономить вычислительные ресурсы и память. А по сравнению с некогерентным методом преимуществом смешанного способа является большая чувствительность при том же интервале накопления, а также более надежное обнаружение слабых сигналов на фоне сильных сигналов других спутников. Недостатками такого подхода является более низкая чувствительность по сравнению с когерентным накоплением и большая сложность по сравнению с некогерентным обнаружителем.
Необходимо заметить, что при увеличении времени накопления (при любом методе) возникает проблема перемещения позиции корреляционного пика и ее дисперсии, связанная с тем, что позиция корреляционного пика перемещается в соответствии с доплеровским сдвигом частоты. Приемник должен компенсировать этот сдвиг, однако на этапе поиска он не может компенсировать его полностью. Так, общепринятое разбиение общего диапазона поиска несущей на поддиапазоиы в 500 Гц приводит к тому, что при времени накопления более 1,5 с корреляционный пик сигнала GPS соответствующий максимальной и минимальной частоте выбранного поддиапазона разойдется наполовину «чипа» т.е. приблизительно на 0,489 микросекунды. Другим немаловажным обстоятельством является то, что момент перехода корреляционного пика из одной временной позиции в другую не известен, что при построении корреляционной функции с шагом по времени в пол «чипа» может привести к энергетическим потерям около одного децибела. Поэтому приемник должен либо ограничить время накопления, либо корректно отслеживать и своевременно перемещать корреляционный пик.
Еще одной проблемой является время поиска. Время поиска зависит от объема пространства поиска. В режиме холодного старта, когда отсутствует априорная информация относительно позиции пользователя, неизвестно время, а также недоступны эфемериды и альманах, объем пространства поиска максимален. Он составляет 300 км по задержке и примерно 10 кГц по частоте Доплера (типичное значение; в специальных приложениях неопределенность по частоте может быть еще больше). Кроме того, необходимо выполнить поиск для всех спутников системы, что соответственно увеличивает затраты времени. Для сокращения времени поиска приоритет следует отдавать решениям, использующим параллельные методы анализа пространства поиска.
Таким образом, для решения задачи поиска слабых навигационных сигналов требуется применение сложных алгоритмов цифровой обработки, оптимизированных для работы на программно-аппаратной платформе с ограниченными вычислительными ресурсами и объемом памяти.
Описан способ и устройство обнаружения спутниковых навигационных сигналов [1], в котором для уменьшения времени поиска используется быстрое преобразование Фурье (БПФ). Данный способ предполагает, что навигационный сигнал, пройдя через радиочастотную часть, подвергается аналого-цифровому преобразованию и сохраняется блоками в памяти. Затем блок отсчетов входного сигнала подвергается БПФ и также сохраняется в памяти. Помимо этого, формируется эталонный сигнал требуемого спутника, который также подвергается БПФ и сохраняется в памяти. Полученные Фурье-образы перемножаются, после чего результат подвергается обратному БПФ (ОБПФ) и анализируется. В нем находится максимальный элемент и сравнивается с порогом. Если он превышает порог, то принимается решение о наличии сигнала данного спутника. При этом позиция максимального элемента определяет задержку сигнала и позволяет рассчитать псевдо дальность. В [1] размер блока отсчетов входного сигнала, который подвергается БПФ, принят равным 4096 и соответствует длительности «эпохи» GPS сигнала. Этот позволяет осуществлять поиск навигационных сигналов достаточно быстро. Недостатком такого подхода является относительно невысокая чувствительность.
Известны также способы и устройства для обнаружения спутниковых навигационных сигналов [2, 3, 4], в которых для повышения чувствительности поиска и возможности обнаружения слабых спутников используется когерентное или совместное когерентно-некогерентное накопление принятого сигнала на достаточно длительном интервале.
В статье [2] описан алгоритм поиска слабых сигналов в программном GPS приемнике. Для обнаружения спутниковых навигационных сигналов предлагается когерентно складывать несколько 1 мс интервалов. При этом указывается на важность того, что интервал интегрирования не должен пересекать границу информационного бита. Для решения этой проблемы предлагается два варианта. Первый вариант заключается в когерентном накоплении на интервале 10 мс. Затем четные и нечетные 10 мс интервалы некогерентно суммируются. При этом гарантируется, что, либо четные, либо нечетные интервалы не будут пересекать границы информационных бит. Затем две некогерентные суммы сравниваются, и выбирается наибольшая из них, которая далее используется для принятия решения о наличии сигнала. Второй вариант заключается в том, что длина когерентного накопления выбирается равной 20 мс, то есть длине одного информационного бита, при этом момент начала накопления выбирается с шагом 1 мс и из всех вариантов выбирается тот, который обеспечивает наибольший уровень корреляции. Соответственно, начало этого интервала принимается за границу информационного бита. Затем осуществляется некогерентное накопление 20 мс интервалов. Также в [2] предлагается для ускорения вычислений при выполнении накопления на 1 мс интервале использовать БПФ. Недостатком данного алгоритма поиска является то, что полноценный перебор всех возможных значений границы информационного бита требует колоссальных аппаратных ресурсов, в том числе памяти, что затрудняет его реализацию.
В [3] рассматриваются различные устройства для когерентного и когерентно-некогерентного накопления, позволяющие повысить чувствительность поиска спутниковых навигационных сигналов. Первое устройство использует когерентное накопление сверток входного сигнала с копией сигнала требуемого спутника на интервале времени, не превышающем длительность одного информационного бита, то есть 20 мс. Второе устройство дополнительно использует детектор границы информационного бита. При этом предполагается, что работа данного детектора может базироваться как на внешней информации, так и на внутренней. В первом случае положение границы бита получается извне, например, если GPS-приемник реализован как часть сотового телефона, то эта информация поступает от оператора сотовой связи. Во втором - информация о границе бита извлекается из самого принятого сигнала. В [3] принцип работы внутреннего детектора границы бита не описывается. Также детектор границы бита обнаруживает изменение фазы входного сигнала на границе бита, если оно происходит. Во втором случае когерентное накопление произведения входного сигнала с копией сигнала требуемого спутника осуществляется на интервале, охватывающем несколько информационных бит. При этом на границе информационных бит осуществляется инвертирование накапливаемой суммы, если это необходимо в соответствии с информацией от детектора границы бит. Третье устройство также использует детектор границы бита, однако определения изменения полярности входного сигнала на границе бита не требуется. В данном случае осуществляет комбинированное когерентно-некогерентное накопление. Сначала осуществляется когерентное накопление произведения входного сигнала с копией сигнала требуемого спутника на интервале, соответствующем длине одного информационного бита, то есть 20 мс. Затем осуществляется некогерентное накопление результатов таких накоплений на длине, зависящей от требуемой чувствительности приемника спутниковых навигационных сигналов и величины остаточного доплеровского смещения частоты. Недостатки данного устройства заключаются в следующем. При использовании первого способа поиска спутниковых навигационных сигналов чувствительность поиска оказывается слишком малой и недостаточной для поиска слабых сигналов. При использовании второго и третьего способов поиска спутниковых навигационных сигналов, использование внешнего детектора границы бита делает данное устройство зависимым от некоторых внешних данных, что зачастую неудобно или невозможно. Использование внутреннего детектора границы бита, то есть определение границы бита на основе информации, извлекаемой из входного сигнала при слабом уровне входного сигнала, имеет высокую вероятность ошибки, а ошибочное детектирование границы бита делает невозможным корректный поиск спутниковых навигационных сигналов.
В статье [4] описан GPS приемник, включающий радиочастотную часть, которая выполняет преобразование сигнала в область нижних частот, аналого-цифровой преобразователь и блок цифровой обработки, который оценивает положение приемника. Блок цифровой обработки состоит из компенсатора доплеровского смещения, блока демодуляции сигнала, блока корреляционной обработки и блока вычисления позиции приемника. Для обнаружения спутниковых навигационных сигналов предлагается использовать метод, заключающийся в когерентном накоплении сигнала на временном интервале, равном 1 информационному биту, то есть 20 мс, с последующим некогерентным накоплением. Другой способ, предлагаемый в [4], предполагает определение принятых данных, демодуляцию сигнала и использование некогерентного накопления на интервале нескольких информационных бит, то есть более 20 мс. В статье признается, что при таком подходе вычислительные ресурсы, необходимые для поиска, оказываются очень большими, и реализация поиска в режиме реального времени невозможна. Для ускорения поиска предлагается использовать информацию о параметрах спутниковых навигационных сигналов, получаемые от некоего сервера, который должен распространять их в широковещательном режиме. Например, приемник, встроенный в мобильный телефон, мог бы получать информацию от базовой станции сотового оператора. Информация включает в себя величины доплеровского смещения сигнала спутника, временную задержку и эфемериды. Использование этой информации позволит существенно уменьшить пространство поиска спутниковых навигационных сигналов и соответственно уменьшить время поиска. Недостатком данного приемника является зависимость от информации о параметрах спутниковых навигационных сигналов, получаемых от внешнего источника, а также от характеристик источника информации и от способа ее предоставления.
Кроме того, все рассмотренные устройства не учитывают происходящее за время длительного накопления входного сигнала изменение задержки спутникового сигнала. Они не содержат средств борьбы с помехами от окружающего электронного оборудования, без чего практическая реализация высокочувствительного поиска невозможна. Также все рассмотренные источники информации не предлагают эффективной программно-аппаратной реализации приемников спутниковых навигационных сигналов.
Раскрытие изобретения
Предлагаемым изобретением решается задача создания устройства для приема спутниковых навигационных сигналов, в частности GPS и ГЛОНАСС, с блоком быстрого и высокочувствительного поиска, реализующего поиск слабых навигационных сигналов на основе комбинирования когерентного накопления в пределах одного информационного бита (20 мс для GPS, 10 мс для ГЛОНАСС) и некогерентного накопления в течение времени, определяемого требуемой чувствительностью приемника. При этом особенностью предлагаемого изобретения является эффективная реализация приемника в виде вычислительной системы с блоками быстрой и медленной памяти в одно- или многопроцессорном варианте при минимизации объема быстрой памяти, доступной каждому процессору, а также вычислительной мощности всей вычислительной системы. Другой особенностью предлагаемого изобретения является использование параллельного поиска по задержке и частоте, что позволяет значительно уменьшить время поиска при холодном старте.
Сущность предлагаемого изобретения в случае приема сигналов GPS (дальнейшее описание, если это не оговаривается специально, относится к приему сигналов GPS) заключается в следующем.
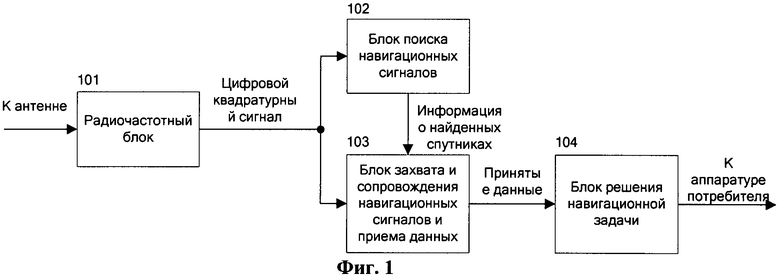
Общая структурная схема приемника спутниковых навигационных сигналов, показанная на фиг.1, содержит радиочастотный блок (101), который выполняет усиление принятого сигнала, преобразование частоты с формированием квадратурных составляющих и аналого-цифровое преобразование. Цифровой квадратурный сигнал с выхода радиочастотного блока поступает в блок поиска навигационных сигналов (102), который выполняет задачу поиска и обнаружения сигналов тех спутников, уровень сигнала которых достаточен, а также оценку параметров этих сигналов: величины доплеровского смещения, времени прихода, уровня сигнала. Также цифровой квадратурный сигнал поступает в блок захвата и сопровождения навигационных сигналов и приема данных (103). Из блока поиска навигационных сигналов (102) информация также поступает в блок захвата и сопровождения навигационных сигналов и приема данных (103), который на ее основе осуществляет точный захват сигналов «видимых спутников», в дальнейшем их сопровождает и извлекает данные из сигнала спутника. Затем данные с выхода блока захвата и сопровождения навигационных сигналов и приема данных (103) поступают в блок решения навигационной задачи (104), который решает навигационную задачу и определяет координаты и скорость приемника. При этом реализация каждого из блоков может быть различной.
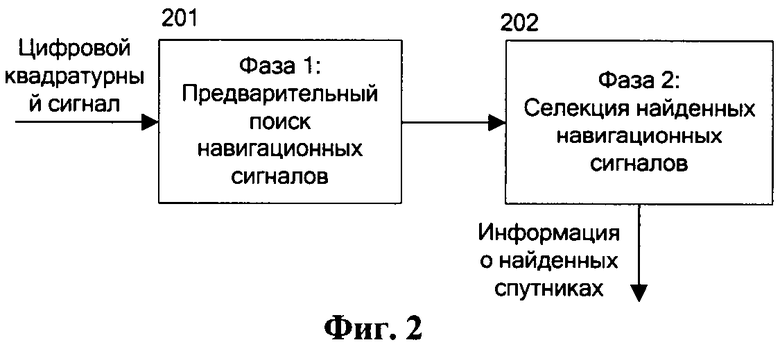
Данное изобретение рассматривает реализацию блока поиска навигационных сигналов в составе навигационного приемника. Предлагается реализовать блок поиска таким образом, чтобы поиск выполнялся в виде двух последовательных фаз (фиг.2). На первой фазе осуществляется предварительный поиск возможных вариантов навигационных сигналов (201), а на второй фазе (202) из возможных вариантов после дополнительной обработки выбирается наиболее вероятный вариант. Как вариант, вторая фаза может отсутствовать, тогда результаты работы первой фазы будут представлять окончательные результаты работы блока поиска навигационных сигналов.
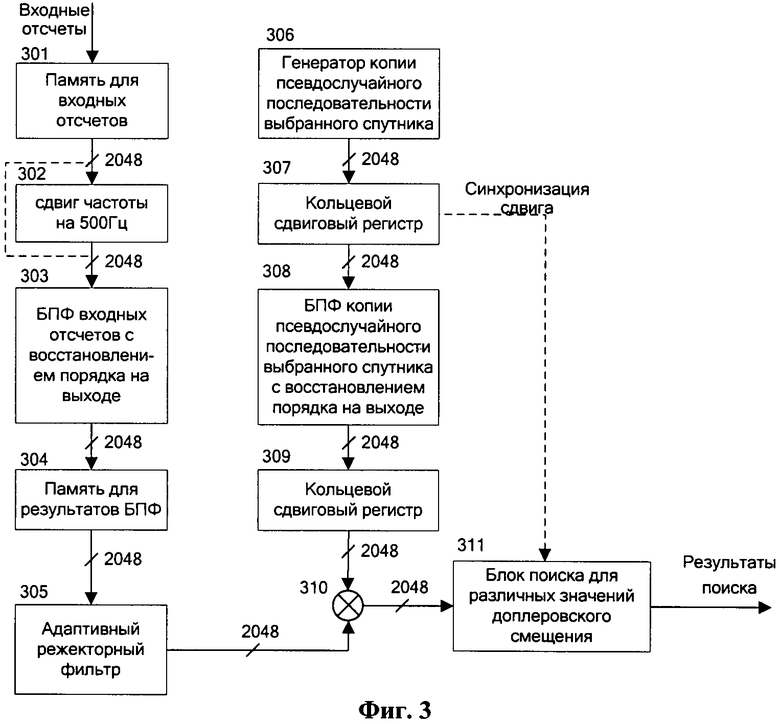
Структурная схема блока предварительного поиска навигационных сигналов на фазе 1 предлагаемого приемника показана на фиг.3. На вход блока поступают входные отсчеты, представляющие собой дискретные выборки из принятого сигнала. Всего в зависимости от использованной частоты дискретизации на интервале 1 мс находится Q отсчетов. Например, Q может быть равно 2048 в случае приема сигнала GPS и Q=1024 в случае приема сигнала ГЛОНАСС. При этом два отсчета сигнала приходятся на один сигнальный чип.
Вначале рассматривается блок предварительного поиска сигналов GPS. Блок содержит память для входных отсчетов (301), данные из которой через схему опционального сдвига частоты на 500 Гц (302) поступают в блок быстрого преобразования Фурье (БПФ) (303). Схема опционального сдвига частоты на 500 Гц (302) умножает входной сигнал на гармоническое колебание в соответствии со следующей формулой:
 , φ=0 или π.
, φ=0 или π.
Результат обработки поступают в память (304), а затем в адаптивный режекторный фильтр (305), реализованный в частотной области. Фильтр изменяет уровень различных частотных составляющих входного сигнала: yn=xn·kn, где kn - адаптивно меняющийся коэффициент в диапазоне от 0 до 1. Другой составной частью описываемого блока поиска является генератор эталона или копии псевдослучайной последовательности выбранного спутника (306). Через кольцевой сдвиговый регистр (307) он соединен с блоком БПФ с восстановлением порядка отсчетов на выходе (308). С выхода блока БПФ спектр копий сигнала поступает во второй кольцевой сдвиговый регистр (309). Этот сдвиговый регистр соединен с умножителем (310), на другой вход которого поступает сигнал с выхода адаптивного режекторного фильтра (305). Кольцевые сдвиговые регистры (307) и (309) преобразуют входную последовательность по следующему закону:
где параметр m определяет направление и размер кольцевого сдвига. Параметр m кольцевого сдвигового регистра (307) изменяется по заранее определенной схеме. Закон изменения m синхронизирован со сдвиговым регистром в блоке поиска, что показано пунктирной линией. Обычно изменения этого параметра производятся с равными временными интервалами и на одинаковое число. Аналогичный параметр для кольцевого сдвигового регистра (309) изменяется в соответствии со схемой поиска по частоте (обычно последовательно увеличивается на 1 или 2). Результат произведения поступает в блок поиска (311), который подготавливает исходные данные о параметрах для дальнейшей обработки в фазе 2. Эти данные рассчитываются для каждого доплеровского смещения и представляют собой основание для гипотезы о факте наличия/отсутствия сигнала спутника.
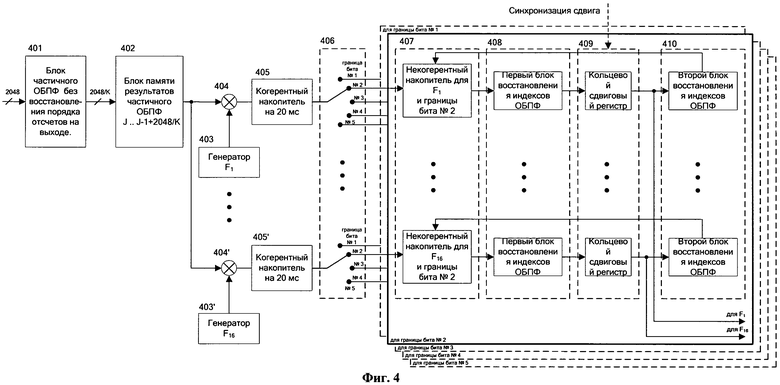
Структурная схема блока поиска показана на фиг.4. На схеме приведена последовательность операций поиска только для одного значения доплеровского смещения. Подготовка исходных данных для работы фазы 2 (фиг.2) заключается в многократном выполнении этой последовательности операций, каждый раз для нового значения доплеровского смещения. Итак, схема поиска содержит блок частичного ОБПФ без восстановления порядка отсчетов на выходе (401) и блок памяти для хранения результатов его работы (402). Блок частичного ОБПФ содержит Q входов и Q/К выходов, где К - целое число степени 2. Из блока памяти Q/К отсчетов поступают на 16 умножителей (404). Число умножителей может быть увеличено до 20, в этом случае точность поиска несколько повысится за счет увеличения вычислительных затрат, увеличение умножителей свыше 20 не целесообразно, так как не приводит к увеличению точности поиска. На второй вход каждого из умножителей поступают сигналы от генераторов (403) синусоидального колебания определенной частоты. Результаты умножения поступают в 16 когерентных накопителей (405) на 20 мс каждый. После когерентного накопителя сигналы распределяется через переключатель (406) на пять входов некогерентных накопителей (407). Каждый из этих пяти результатов когерентного накопления отличается положением границы бита, т.е. на 1/5 длительности информационного бита, что составляет 4 мс. Вход каждого некогерентного накопителя (407) соединен с выходом одного из когерентных накопителей (405). Таким образом, количество некогерентных накопителей в 5 раз больше числа когерентных накопителей, и выбор того или иного некогерентного накопителя определяется положением переключателей (406) и значением частоты генераторов (403). Далее с выхода некогерентного накопителя (407) сигнал поступает в первый блок восстановления индексов ОБПФ (408), который работает с Q отсчетами. Затем отсчеты поступают в кольцевой сдвиговый регистр (409), а после него - во второй блок восстановления индексов ОБПФ (410), который восстанавливает порядок индексов к виду, пригодному для работы некогерентного накопителя (407). Первый и второй блоки восстановления индексов идентичны.
Данное модулю (фиг.4) название "блок поиска при определенном доплеровском смещении" означает, что доплеровское смещение входного сигнала считается известным с точностью до 500 Гц и уточняется внутри блока умножением поступающих отсчетов сигнала на 16 опорных колебаний разной частоты. Функционально блок выполняет следующие операции: ОБПФ (или его часть) без восстановления порядка на выходе, дополнительное уточнение смещения частоты, смешанное когерентно-некогерентное накопление, "прокрутка" результатов накопления в сдвиговом регистре для компенсации перемещения корреляционного пика с сохранением исходной (без восстановления порядка) структуры выходов.
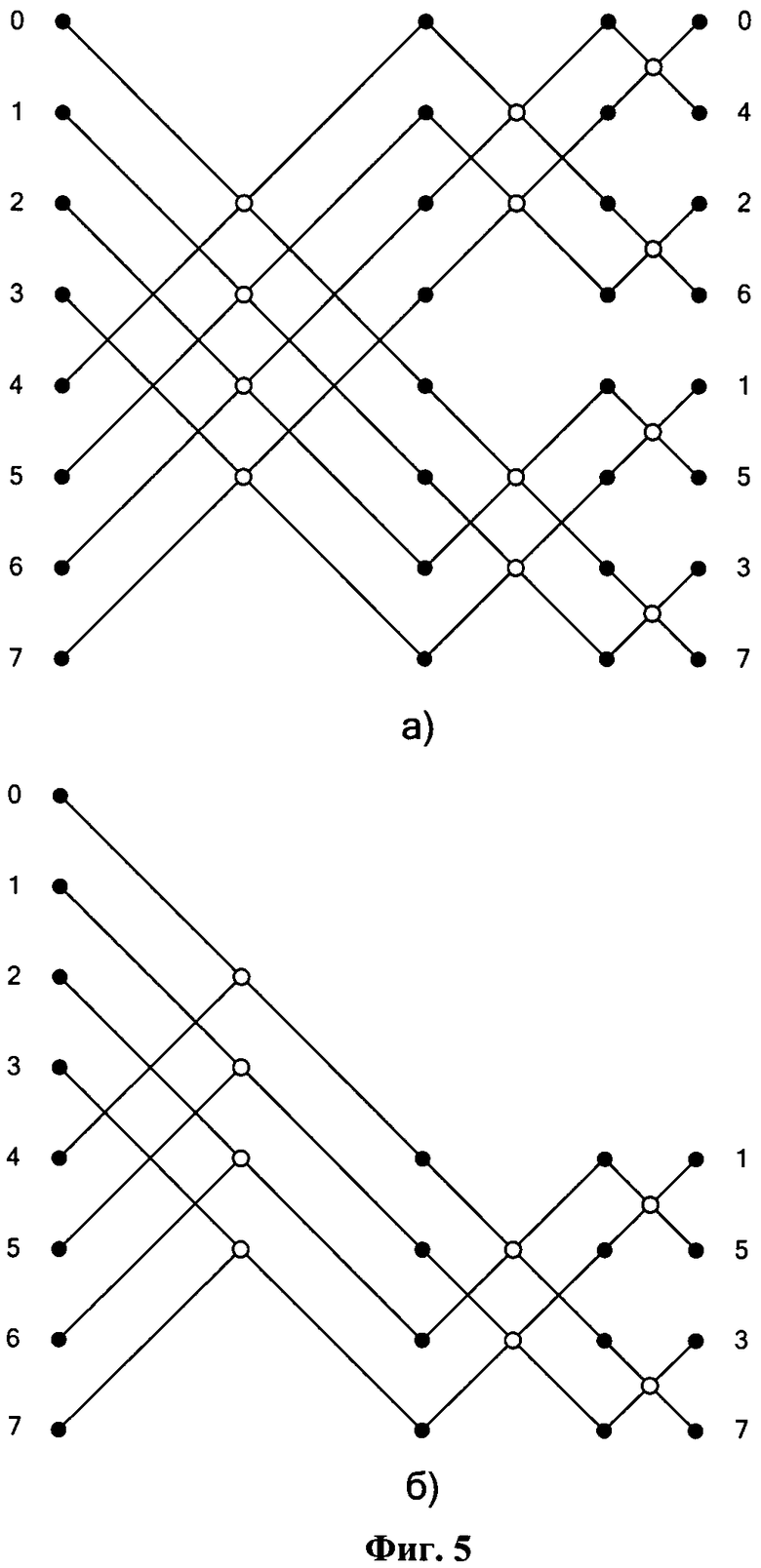
Блок частичного ОБПФ ((401) на фиг.4) без восстановления порядка представляет собой узел, выполняющий преобразование Фурье в соответствии с алгоритмом прореживания по частоте [5, 6]. При его выполнении выходные значения получаются упорядоченными в соответствии с двоично-инверсными значениями индексов. Затем в стандартном алгоритме осуществляется переупорядочение выходных значений в соответствии с естественным порядком индексов. Особенность работы блока частичного ОБПФ без восстановления порядка заключается в том, что операция по переупорядочению выходных значений не производится (она будет выполняться в другой части приемника, что позволит сэкономить вычислительные ресурсы), а частичность означает, что используется только некоторая часть выходных значений, выбираемая дополнительным параметром. Структура алгоритма прореживания по частоте в том случае, когда используется только некоторая часть выходных значений, также позволяет исключить выполнение части операций. Например, на фиг.5а [5, рис.6.11] показано 8-точечное ОБПФ с прореживанием по частоте, а на фиг.5б - случай использования четырех значений из этого ОБПФ. Блок частичного ОБПФ также может быть реализован на основе алгоритма быстрого преобразования Фурье с прореживанием по времени. Частичность ОБПФ с прореживанием по времени достигается тем же образом, что и частичность ОБПФ с прореживанием по частоте, однако порядок отсчетов на выходе будет восстановлен автоматически. Вместе с тем, реализация ОБПФ с прореживанием по времени требует переупорядочивания данных на входе. Использование ОБПФ с прореживанием по времени делает не нужными блоки восстановления индексов ОБПФ (408) и (410). Очевидным недостатком схемы, использующей частичное ОБПФ с прореживанием по времени является дополнительная операция переупорядочивания данных на входе, однако отсутствие блоков восстановления индексов (408) и (410) позволяет эффективнее использовать память для хранения результатов некогерентного накопления (407).
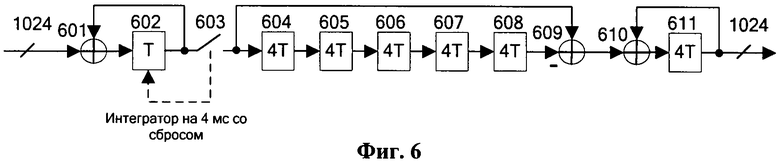
Схема когерентного накопителя на 20 мс ((405) фиг.4) приведена на фиг.6 и содержит интегратор со сбросом, состоящий из сумматора (601), элемента задержки (регистр) на Т=1 мс (602) и ключа (603). Результат интегрирования поступает в линию задержки, состоящую из пяти последовательно соединенных элементов задержки на 4 мс (604) - (608). Суммарная задержка составляет 5·4Т=20 мс, а сдвиг происходит каждые 4 мс. На выходе задержанный сигнал вычитается из входного в вычитателе (609), что в совокупности с выходным интегратором (сумматор (610) и регистр (611)) обеспечивает скользящее усреднение сигнала на интервале 20 мс.
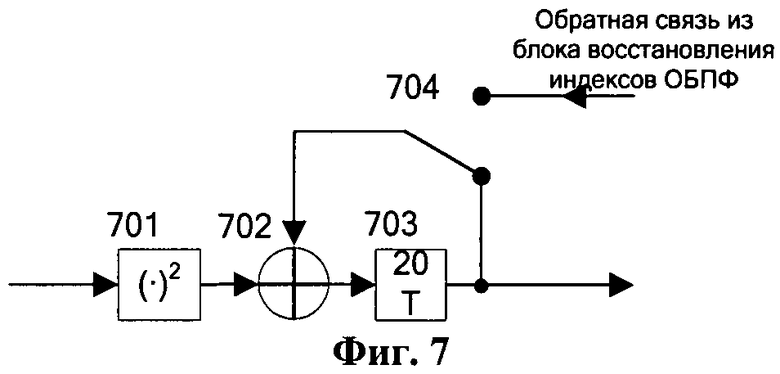
Структурная схема некогерентного накопителя ((407) фиг.4), изображена на фиг.7 и содержит квадратор (701) с интегратором (сумматор (702) и регистр (703)). Переключатель (704), находясь в нижнем положении, позволяет изменять конфигурацию цепи обратной связи, включая в нее либо регистр (703), либо первый и второй блоки восстановления индексов ОБПФ вместе со сдвиговым регистром.
Результаты, полученные на первой фазе, а именно наиболее вероятные значения величины доплеровского смещения, начальной позиции копии псевдослучайной последовательности выбранного спутника, временной позиции границы информационного бита передаются на вторую фазу поиска. В ходе второй фазы выполняется повторное вычисление корреляций для данных значений с более высокой точностью и большим временем накопления, а также принимается окончательное решение о наличие сигнала спутника и окончательная оценка его параметров, которые затем передаются в блок захвата и сопровождения навигационных сигналов и приема данных.
В случае приема сигналов ГЛОНАСС длительность информационного бита составляет 10 мс. В этом случае, вместо 2048-точечного БПФ и ОБПФ используются 1024-точечные БПФ и ОБПФ, количество умножителей блока поиска при определенном доплеровском смещении равно 8, количество генераторов колебаний определенной частоты равно 8, а время когерентного накопления составляет 10 мс. Время задержки каждого из пяти элементов задержки на выходе ключа в когерентном накопителе вместо 4 мс равно 2 мс, а время задержки элемента задержки некогерентного накопителя вместо 20 мс составляет 10 мс.
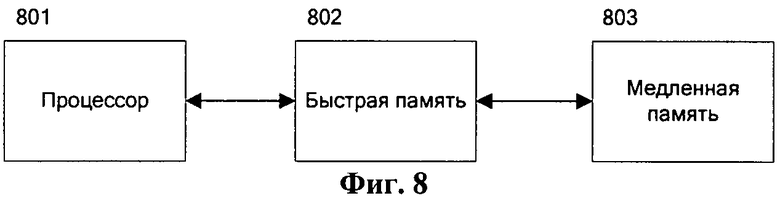
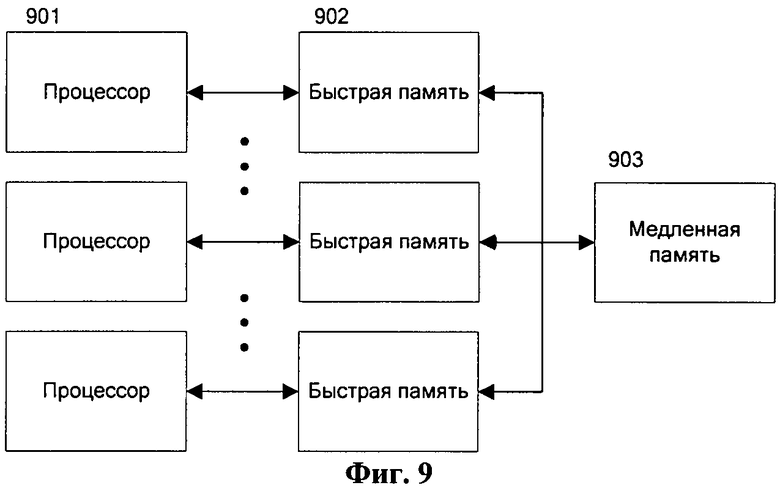
Для реализации всех требуемых операций приемник может быть построен в виде одно- или многопроцессорной вычислительной системы. Однопроцессорный вариант (фиг.8) содержит процессор, быструю память и медленную память. Быстрая память может быть размещена на том же кристалле, что и процессор. Многопроцессорный вариант (фиг.9) содержит несколько процессоров, с каждым из которых связана быстрая память (возможно, размещенная на том же кристалле, что и процессор) и медленную память, общую для всех процессоров.
Приемник может быть выполнен в виде одно- или многопроцессорной системы, реализованной в качестве встроенного процессорного ядра в СБИС, при этом наиболее вычислительно-емкие блоки приемника, такие как БПФ и ОБПФ, могут быть выполнены в виде аппаратных ускорителей, размещенных в той же СБИС.
В случае реализации приемника на многоядерной, многопроцессорной, а также любой другой аппаратной платформе, обеспечивающей параллелизм вычислений, описанная выше схема может быть изменена следующим образом: выход БПФ копии псевдослучайной последовательности выбранного спутника ((308) фиг.3) соединяется сразу с несколькими кольцевыми сдвиговыми регистрами (309), выход адаптивного режекторного фильтра (305) также подается на несколько умножителей (310), вторые входы которых соединены с кольцевыми сдвиговыми регистрами (309), а результаты произведений передаются на блоки поиска (311) и так далее.
В случае реализации приемника на одноядерной, однопроцессорной или иной другой аппаратной платформе, не обеспечивающей параллелизма вычислений, а также, если доступный системе параллелизм не достаточен для одновременного выполнения операций соответствующих всем возможным значениям параметра m второго кольцевого сдвигового регистра ((309) фиг.3) и всем наборам выходов частичных ОБПФ ((401) фиг.4), объем памяти для результатов БПФ ((304) фиг.3) должен быть существенно увеличен. Поступающие на вход умножителя ((310) фиг.3) через адаптивный режекторный фильтр ((305) фиг.3) данные в этом случае вычитываются из памяти ((304) фиг.3) многократно. Одновременно с этим меняется параметр m второго кольцевого сдвигового регистра ((309) фиг.3), а также параметр, определяющий выходы блока частичного ОБПФ без восстановления порядка на выходе ((401) фиг.4).
Краткое описание чертежей
На фиг.1 приведена общая структурная схема приемника спутниковых навигационных сигналов, которая содержит радиочастотный блок (101), блок поиска навигационных сигналов (102), блок захвата и сопровождения навигационных сигналов и приема данных (103), блок решения навигационной задачи (104).
На фиг.2 приведена структурная схема блока поиска навигационных сигналов предлагаемого приемника, включающая блок поиска на первой фазе (201) и блок поиска на второй фазе (202).
На фиг.3 приведена структурная схема блока поиска навигационных сигналов предлагаемого приемника на первой фазе поиска, которая содержит память для входных отсчетов (301), схему сдвига частоты на 500 Гц (302), блок БПФ с восстановлением порядка отсчетов на выходе (303), память для результатов БПФ (304), адаптивный режекторный фильтр (305), генератор копии псевдослучайной последовательности выбранного спутника (306), кольцевой сдвиговый регистр (307), блок БПФ копии псевдослучайной последовательности выбранного спутника с восстановлением порядка отсчетов на выходе (308), кольцевой сдвиговый регистр (309), поэлементный умножитель (310), блок поиска при определенном доплеровском смещении (311).
На фиг.4 приведена структурная схема блока поиска при определенном доплеровском смещении, которая содержит блок частичного ОБПФ без восстановления порядка отсчетов на выходе (401), блок памяти результатов частичных ОБПФ (402), набор блоков, каждый из которых состоит из генератора колебаний определенной частоты (403), умножителя (404) и когерентного накопителя на 20 мс (405), набор переключателей (406), набор некогерентных накопителей (407), первый набор блоков восстановления индексов ОБПФ (408), набор кольцевых сдвиговых регистров (409) и второй набор блоков восстановления индексов ОБПФ (410).
На фиг.5 приведена структурная схема частичного ОБПФ с использованием половины выходных значений.
На фиг.6 приведена структурная схема когерентного накопителя на 20 мс, которая содержит первый сумматор (601), элемент задержки на 1 мс (602), переключатель (603), набор элементов задержки на 4 мс (604)-(608), вычитатель (609), второй сумматор (610) и элемент задержки на 4 мс (611).
На фиг.7 приведена структурная схема некогерентного накопителя, которая содержит квадратор (701), сумматор (702), элемент задержки на 20 мс (703) и переключатель (704).
На фиг.8 приведена структурная схема однопроцессорной вычислительной системы, которая содержит процессор (801), быструю память (802) и медленную память (803).
На фиг.9 приведена структурная схема многопроцессорной вычислительной системы, которая содержит набор процессоров (901), набор блоков быстрой памяти (902) и медленную память (903).
Осуществление изобретения
Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска работает следующим образом.
Входной сигнал поступает на радиочастотный блок, где усиливается, преобразуется в квадратурный сигнал на нулевой частоте и подвергается аналого-цифровому преобразованию. На выходе радиочастотного блока получается цифровой квадратурный сигнал, который подается на блок поиска навигационных сигналов. Блок поиска обнаруживает сигналы тех спутников, которые «видимы» в точке размещения антенны приемника и уровень сигнала которых достаточен для их приема, оценивает параметры этих сигналов (доплеровское смещение, время прихода, уровень сигнала) и полученную информацию передает блоку захвата, сопровождения и приема данных (ЗСПД). При этом блок ЗСПД на основе информации, полученной от блока поиска, осуществляет точный захват сигналов «видимых» спутников, в дальнейшем их сопровождает и извлекает данные из сигнала спутника и передает эти данные в блок решения навигационной задачи, который по этим данным и другой имеющейся информации решает навигационную задачу и определяет координаты и скорость объекта, на котором расположен приемника.
Работа блока поиска навигационного сигнала отдельно выбранного спутника состоит из двух фаз. Первая фаза заключается в следующем. Отсчеты входного квадратурного цифрового сигнала накапливаются в памяти для входных отсчетов. Для определенности рассмотрим частоту дискретизации сигнала GPS 2,048 МГц (при чиповой частоте GPS 1,023 МГц это соответствует 2-м отсчетам на один сигнальный чип). Тогда при накоплении сигнала длительностью 1 мс имеем 2048 отсчетов сигнала GPS. Над этими данными выполняется БПФ длиной 2048. В случае сигнала ГЛОНАСС имеем 1024 отсчета. Здесь и далее БПФ длиной 2048 при приеме ГЛОНАСС заменяется на БПФ длиной 1024.
Результаты БПФ также сохраняются в памяти и затем пропускаются через адаптивный режекторный фильтр, работающий в частотной области, для удаления сильных сосредоточенных помех. Также формируется копия псевдослучайной последовательности выбранного спутника длиной 2048 отсчетов. Данная последовательность сдвигается циркулярно в кольцевом сдвиговом регистре (данный сдвиг является необязательным, но желательным, что будет пояснено ниже), над полученной последовательностью также выполняется БПФ длиной 2048. Результат преобразования сохраняется в кольцевом регистре, который позволяет получить несколько циркулярно-сдвинутых копий своего содержимого, каждая из которых используется для коррекции определенного доплеровского смещения входного сигнала. Каждая из копий поэлементно перемножается с выходом адаптивного режекторного фильтра и поступает на свой блок поиска при определенном доплеровском смещении.
Работа блока поиска при определенном доплеровском смещении заключается в следующем. Массив входных данных (далее отсчетов) длиной 2048 подается на набор блоков частичного ОБПФ. Если число таких блоков равно двум, то на выходе каждого из них получается 1024 отсчета, соответствующих первой и второй половинам полного ОБПФ. Выходные отсчеты ОБПФ представляют собой сигнал во временной области, который сохраняется в блоках памяти (каждому частичному ОБПФ соответствует свой блок памяти). Затем происходит преобразование частоты сигнала и его когерентное накопление, что позволяет осуществить узкополосную фильтрацию в 16-ти полосах в диапазоне частот от -250 до 250 Гц. Интервал когерентного накопления равен 20 мс, что соответствует длительности одного информационного бита спутникового сигнала. Когерентное накопление осуществляется в два этапа. Сначала блок комплексных отсчетов интегрируется на интервале 4 мс. Затем осуществляется скользящее накопление на пяти 4-х мс интервалах, что соответствует 20 мс (здесь и далее временные интервалы в 4 и 20 мс в приемнике ГЛОНАСС заменяются на 2 и 10 мс соответственно). Результат накопления с шагом в 4 мс распределяется между пятью некогерентными накопителями - каждый для своей границы бита. Время накопления некогерентного накопителя может быть установлено в широких пределах (обычно до 10 с) и зависит от требуемой чувствительности приемника. При некогерентном накоплении квадрат модуля комплексных отсчетов суммируются с накоплением. Из-за большой продолжительности некогерентного накопления сам сигнал необходимо сдвигать для компенсации ухода максимального отсчета (корреляционного пика). Перемещение корреляционного пика обусловлено изменением расстояния до спутника за время между началом накопления и его окончанием. Реализация этого сдвига осуществляется в кольцевом сдвиговом регистре, но для того, чтобы сдвиг прошел корректно до и после этого проводится процедура восстановления индексов ОБПФ. В кольцевом сдвиговом регистре сигнал циркулярно сдвигается на 0, 1 или -1 отсчет в соответствии со значением доплеровского смещения, которое позволяет оценить скорость изменения расстояния до спутника. Выход этого кольцевого буфера используется для принятия решения о наличии спутников и их параметрах.
Для уменьшения сложности приемника и экономии памяти желательно применять числа с малым числом разрядов, например, с разрядностью 8 бит. Однако, в случае использования сигнала с периодическим кодом (код, используемый в GPS и ГЛОНАСС сигналах, является именно таким) при расчете ОБПФ с числами малой разрядности при накоплении результата возрастает вероятность ложного детектирования. Причина этого эффекта заключается в том, что ОБПФ при большой длине и малой разрядности вносит смещение в первые отсчеты результата и соответственно ОБПФ ложно завышает их абсолютное значение (в особенности нулевой отсчет). При большом накоплении и при слабом сигнале, когда уровень максимального отсчета ОБПФ незначительно превышает остальные, это приводит к ложным срабатываниям в начале корреляционного отклика. Для исключения этого эффекта используется циркулярный сдвиг копии псевдослучайной последовательности выбранного спутника, а для его компенсации синхронно осуществляется циркулярный сдвиг в регистрах блока поиска при определенном доплеровском смещении. Это приводит к тому, что смещение вносится не только в первые отсчеты результата, а равномерно распределяется по всем отсчетам, тем самым влияние этой погрешности снижается.
Также, применение для накопления аккумуляторов с малой разрядностью может привести к эффекту переполнения. Чтобы избежать этого, сумматоры выполняют операции сложения с насыщением. Кроме того, периодически значение аккумулятора сохраняется в памяти, сам аккумулятор сбрасывается и начинается новое накопление, что эквивалентно динамическому расширению разрядной сетки. Тем не менее, вероятность возникновения насыщения существует, и на первой фазе часто возникает несколько достигших насыщения результатов накопления. Для точного определения, какая величина доплеровского смещения и позиция сигнала истинная, осуществляется вторая фаза поиска.
Приемник может также осуществлять поиск спутниковых навигационных сигналов в режиме «горячего старта», при котором предполагается, что приемник обладает информацией о расположении и движении спутников. Это позволяет существенно сократить неопределенность по величине доплеровского смещения и, соответственно, ускорить поиск.
При реализации приемника в виде одно- или многопроцессорной вычислительной системы (фиг.8, 9) большое значение имеет вопрос экономии объема быстрой памяти. Быстрая память является дорогим ресурсом, ее объем во всех вычислительных системах ограничен и, как правило, недостаточен для размещения всех требуемых данных. Поэтому организация вычислительного процесса должна предусматривать минимизацию обмена данными между быстрой и медленной памятью в системе. При использовании многопроцессорной вычислительной системы также необходимо предусмотреть распараллеливание вычислений для эффективного использования всех процессоров. С целью минимизации обмена данными между быстрой и медленной памятью предусмотрено выполнение частичного ОБПФ. Это позволяет уменьшить размер блока памяти на выходе ОБПФ с 2048 до N=2048/К. Соответственно уменьшается размер блоков памяти в когерентном и некогерентном накопителе. Коэффициент К выбирается таким образом, чтобы суммарный размер памяти в когерентном и некогерентном накопителях соответствовал размеру быстрой памяти на один процессор. Также с целью экономии объема быстрой памяти часть вычислений (те, что возможно) выполняется с малой разрядностью, например 8 бит. При этом для исключения переполнения суммирование осуществляется с насыщением. В то же время, вычисления, предусматривающие сохранение данных в медленной памяти, можно выполнять с большей разрядностью, например 16 или 32 бит. Поэтому возникает возможность разделить реализацию накопителя между быстрой и медленной памятью. Например, нужно выполнить С операций сложения с накоплением. Если выполнить их все с использованием быстрой памяти с разрядностью 8 бит, то наступит насыщение. Однако при уменьшении числа операций в D раз насыщение не наступит или будет незначительным. Результат такого частичного накопления сохраняется в медленной памяти с большей разрядностью. Затем повторно выполняется C/D операций сложения с насыщением в быстрой памяти с разрядностью 8 бит и результат этого суммирования добавляется к значению, ранее сохраненному в медленной памяти, и так далее, пока не будет выполнены все С операций накопления. Таким образом, могут быть реализованы сумматоры в когерентном и некогерентном накопителях.
При использовании многопроцессорной вычислительной системы различные части ОБПФ могут выполняться на разных процессорах. При этом параллелизм вычислений организован следующим образом.
Пусть ведется параллельный поиск S спутников, при этом имеется L параллельно анализируемых доплеровских смещений с шагом 500 Гц (в холодном старте общее число доплеровских смещения больше, либо равно 21, а в горячем старте - 1…4), К - коэффициент дробления ОБПФ и является степенью двойки, М - количество подинтервалов накопления (полный интервал делится на части). Общее количество параллельно работающих процессов равно произведению этих величин. Пусть V - число процессоров в вычислительной системе.
Параметры L, К, М и S выбираются исходя из соотношения доступных процессоров V и объема быстрой памяти и ее доступности со стороны процессоров. При недостатке памяти величины L, М и S выбираются равными единице, а К выбирается таким образом, чтобы объем требуемой быстрой памяти, деленный на К, оказался меньше имеющейся в системе и способной быть выделенной на один процессор. Если К меньше числа процессоров, т.е. К<V, то возможно увеличение М, L и S, и так до тех пор, пока S·K·L·M<V. При К>1 возникает большая зависимость между процессами, т.к. циркулярные сдвиги в различных блоках ОБПФ возможны только тогда, когда все К процессов достигли точки данного сдвига (замена ОБПФ с прореживанием по частоте на ОБПФ с прореживанием по времени уменьшает зависимость между процессами, но увеличивает общее количество операций). Параллелизм по остальным степеням свободы таких ограничений не накладывает.
Однопроцессорная вычислительная система (фиг.8) может быть построена на основе процессора фирмы Intel, при этом быстрая память соответствует кэш-памяти процессора, при этом в процессе вычислений происходит обмен данными между кэш-памятью процессора и внешней (медленной) памятью. Многопроцессорная вычислительная система (фиг.9) может быть также построена на основе многоядерного процессора фирмы Intel, при этом каждый процессор соответствует одному ядру, быстрая память соответствует кэш-памяти ядра, и в процессе вычислений происходит обмен данными между кэш-памятью ядра и внешней (медленной) памятью.
Источники информации
1. US 6725157 Indoor GPS clock.
2. Psiaki М. L. Block Acquisition of Weak GPS Signal in a Software Receiver. - ION GPS 2001, USA, Salt Lake City.
3. WO 00/58745 Patent. Signal detector employing coherent integration.
4. Weill L.R., Kishimoto N., Hirata S., Chin K.X. The Next Generation of a Super Sensitive GPS System. - ION GNSS 17th International Technical meeting of the Satellite Division, 2004, USA, Long Beach.
5. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. - М., 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С УСТРОЙСТВОМ БЫСТРОГО ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ В УСЛОВИЯХ ВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2006 |
|
RU2341898C2 |
| СПОСОБ КОРРЕКЦИИ ТРАЕКТОРИИ ПОЛЕТА КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537818C1 |
| СПОСОБ ПРОГРАММНОЙ ОБРАБОТКИ БУФЕРИЗОВАННЫХ ВЫБОРОК ОЦИФРОВАННЫХ СИГНАЛОВ И МУЛЬТИСИСТЕМНЫЙ МНОГОКАНАЛЬНЫЙ ПРОГРАММНЫЙ ПРИЕМНИК РЕАЛЬНОГО ВРЕМЕНИ СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И СИСТЕМ ИХ ПОДДЕРЖЕК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2336631C2 |
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКЕ СПУТНИКОВОЙ НАВИГАЦИИ | 2010 |
|
RU2432585C1 |
| Высокочувствительный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2017 |
|
RU2656998C1 |
| УСТРОЙСТВО ПОИСКА С ПРОГРАММИРУЕМЫМ СОГЛАСОВАННЫМ ФИЛЬТРОМ ДЛЯ ПОИСКА МНОЖЕСТВЕННЫХ ПИЛОТ-СИГНАЛОВ | 2000 |
|
RU2254680C2 |
| СПУТНИКОВЫЙ НАВИГАЦИОННЫЙ ГЛОНАСС/GPS/GALILEO-ПРИЕМНИК С КОРРЕЛЯТОРАМИ, АСИНХРОННО УПРАВЛЯЕМЫМИ ВНЕШНИМ ПРОЦЕССОРОМ | 2010 |
|
RU2456630C1 |
| Многочастотный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2021 |
|
RU2787076C1 |
| СПОСОБ МНОГОЧИСЛЕННЫХ НАЧАЛЬНЫХ ПОИСКОВ ДЛЯ СИСТЕМ МДКР И ГСП | 2003 |
|
RU2328820C2 |
Изобретение может быть использовано для приема навигационных сигналов от спутников ГЛОНАСС и GPS. Достигаемый технический результат - возможность обнаружения слабых спутниковых навигационных сигналов и повышение чувствительности поиска путем использования совместного когерентно-некогерентного накопления принятого сигнала на достаточно длительном интервале, а также использование для реализации приемника одно- или многопроцессорной вычислительной системы. Однопроцессорный вариант содержит процессор, быструю память и медленную память. Для ускорения вычислений ряд операций может выполняться специализированными аппаратными акселераторами. Быстрая память может быть размещена на том же кристалле, что и процессор. Многопроцессорный вариант содержит несколько процессоров, с каждым из которых связана быстрая память (возможно, размещенная на том же кристалле, что и процессор), и медленную память, общую для всех процессоров. Однопроцессорная вычислительная система может быть построена на основе процессора фирмы Intel, при этом быстрая память соответствует кэш-памяти процессора, при этом в процессе вычислений происходит обмен данными между кэш-памятью процессора и медленной памятью. Многопроцессорная вычислительная система может быть построена на основе многоядерного процессора фирмы Intel, при этом каждый процессор соответствует ядру, а быстрая память соответствует кэшпамяти ядра, при этом в процессе вычислений происходит обмен данными между кэш-памятью ядра и медленной памятью. 12 з.п. ф-лы, 9 ил.
1. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска, содержащий радиочастотный блок, блок поиска навигационных сигналов, блок захвата и сопровождения навигационных сигналов и приема данных, блок решения навигационной задачи, при этом выход радиочастотного блока соединен с входом блока поиска навигационных сигналов и с входом блока захвата и сопровождения навигационных сигналов и приема данных, выход блока поиска навигационных сигналов соединен с входом блока захвата и сопровождения навигационных сигналов и приема данных, а выход блока захвата и сопровождения навигационных сигналов и приема данных соединен с входом блока решения навигационной задачи, при этом блок поиска навигационных сигналов содержит память для входных отсчетов, выход которой соединен с входом схемы сдвига частоты на 500 Гц, выход которой соединен с блоком быстрого преобразования Фурье (БПФ) с восстановлением порядка отсчетов на выходе, выход которого соединен с входом памяти для результатов БПФ, генератор копии псевдослучайной последовательности выбранного спутника, блок БПФ копии псевдослучайной последовательности выбранного спутника с восстановлением порядка отсчетов на выходе, выход которого соединен с первым кольцевым сдвиговым регистром, выход которого соединен с первым входом поэлементного умножителя, выход поэлементного умножителя соединен с входом блока поиска при определенном доплеровском смещении, выход блока поиска при определенном доплеровском смещении используется для принятия решения о наличии спутников и их параметрах, отличающийся тем, что в блок поиска навигационных сигналов добавлены адаптивный режекторный фильтр, вход которого соединен с выходами памяти для результатов БПФ от входных отсчетов, а выход соединен со вторым входом поэлементного умножителя, второй кольцевой сдвиговый регистр, вход которого соединен с выходом генератора копии псевдослучайной последовательности выбранного спутника, а выходы соединены с блоком БПФ копии псевдослучайной последовательности выбранного спутника с восстановлением порядка отсчетов на выходе, блок поиска при определенном доплеровском смещении содержит блок частичного обратного быстрого преобразования Фурье (ОБПФ) без восстановления порядка отсчетов на выходе, блок памяти результатов частичных ОБПФ, набор шестнадцати блоков, каждый из которых состоит из генератора гармонических колебаний, причем значения частоты колебаний в различных генераторах меняются в диапазоне от 250 Гц до 250 Гц, умножителя и когерентного накопителя на 20 мс, набор шестнадцати переключателей, набор некогерентных накопителей, первый набор блоков восстановления индексов ОБПФ, набор кольцевых сдвиговых регистров и второй набор блоков восстановления индексов ОБПФ, при этом вход блока частичного ОБПФ без восстановления порядка отсчетов является входом блока поиска при определенном доплеровском смещении, а выход соединен с входом блока памяти результатов частичных ОБПФ, выход которого соединен с первыми входами умножителей, вторые входы умножителей соединены с генераторами гармонических колебаний, а выходы умножителей соединены с входами когерентных накопителей на 20 мс, при этом каждый умножитель соединен с соответствующим ему когерентным накопителем на 20 мс, выходы когерентных накопителей на 20 мс соединены с входами переключателей, при этом каждый когерентный накопитель на 20 мс соединен с соответствующим ему переключателем, а каждый выход всех переключателей - с первым входом соответствующего некогерентного накопителя, выход каждого некогерентного накопителя соединен с входом соответствующего блока восстановления индексов ОБПФ из первого набора, выход каждого блока восстановления индексов ОБПФ из первого набора соединен с входом соответствующего кольцевого сдвигового регистра, а выход каждого кольцевого сдвигового регистра соединен с входом соответствующего блока восстановления индексов ОБПФ из второго набора, а выход каждого блока восстановления индексов ОБПФ из второго набора соединен с вторым входом соответствующего некогерентного накопителя, при этом когерентный накопитель на 20 мс содержит первый сумматор, выход которого соединен с входом элемента задержки на 1 мс, выход которого соединен с входом ключа, замыкающегося раз в 4 мс, и с другим входом первого сумматора, на который в момент замыкания ключа подается 0, выход ключа соединен с цепочкой из пяти последовательно соединенных элементов задержки на 4 мс, при этом вход первого элемента задержки соединен с выходом ключа, а выход последнего элемента задержки соединен с входом вычитателя, второй вход вычитателя также соединен с выходом ключа, выход вычитателя соединен с входом второго сумматора, выход второго сумматора соединен с элементом задержки на 4 мс, выход которого соединен с другим входом второго сумматора и также является выходом когерентного накопителя, при этом некогерентный накопитель содержит квадратор, выход которого соединен с сумматором, выход сумматора соединен с элементом задержки на 20 мс, а выход элемента задержки соединен с вторым входом сумматора и является выходом некогерентного накопителя.
2. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по п.1, отличающийся тем, что в в случае приема сигнала GPS блоки БПФ и ОБПФ выполняют преобразование размером 2048 точки.
3. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по п.1, отличающийся тем, что в случае приема сигнала ГЛОНАСС блоки БПФ и ОБПФ выполняют преобразование размером 1024 точки.
4. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по п.1, отличающийся тем, что размер памяти для результатов БПФ от выходных отсчетов, выход которой соединен с входом адаптивного режекторного фильтра, достаточен для сохранения не одного, а нескольких (1..Т) результатов БПФ, при этом первый кольцевой сдвиговый регистр последовательно или последовательно-параллельно (при одновременном наличии нескольких альтернативных выходов) реализует на своем выходе (выходах) все необходимые варианты сдвига, при этом изменение значения сдвига первого кольцевого сдвигового регистра означает повторное чтение содержимого памяти результатов БПФ, при этом второй кольцевой сдвиговый регистр не меняет своего состояния либо меняет свое состояние по некоторому закону, зависящему от вычитываемого из памяти БПФ порядкового номера выхода БПФ (1..Т), причем частичный ОБПФ в блоке поиска при определенном доплеровском смещении последовательно отображает на своем выходе все результаты полного ОБПФ для соответствующего значения сдвига первого кольцевого сдвигового регистра, при этом изменение отображаемой на выходе частичного ОБПФ части эквивалентного полного ОБПФ означает повторное чтение содержимого памяти результатов БПФ.
5. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по п.1, отличающийся тем, что входы и выходы сумматоров имеют разрядность 8 бит, и сумматоры выполняют операции сложения с насыщением.
6. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по п.5, отличающийся тем, что он реализован в виде однопроцессорной вычислительной системы, содержащей процессор, быструю память и медленную память, при этом быстрая память может быть размещена на том же кристалле, что и процессор, при этом в процессе вычислений происходит обмен данными между быстрой и медленной памятью.
7. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по п.5, отличающийся тем, что он реализован в виде многопроцессорной вычислительной системы, содержащей несколько процессоров, с каждым из которых связана быстрая память (возможно, размещенная на том же кристалле, что и процессор), и медленную память, общую для всех процессоров, при этом в процессе вычислений происходит обмен данными между быстрой и медленной памятью, а также различные части ОБПФ выполняются на разных процессорах, при этом число выходов частичного ОБПФ выбирается таким образом, чтобы все последующие элементы задержки могли быть размещены внутри быстрой памяти, благодаря чему обмен между быстрой и медленной памятью в процессе обработки входных отсчетов при определенном доплеровском смещении становится минимальным.
8. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по п.6, отличающийся тем, что все элементы задержки кроме последнего элемента задержки когерентного накопителя имеют разрядность 8 бит для действительных чисел и 8 бит для реальной и мнимой частей комплексных чисел, а 8-разрядные выходы некогерентных накопителей отображаются на 16-разрядные накопители в медленной памяти, причем перенос данных из 8-разрядных накопителей, расположенных в быстрой памяти, в медленную память производится путем периодического добавления содержимого 8-разрядных накопителей к содержимому 16-разрядных накопителей в медленной памяти, после чего содержимое 8-разрядных накопителей в быстрой памяти обнуляется.
9. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по п.7, отличающийся тем, что все элементы задержки кроме последнего элемента задержки когерентного накопителя имеют разрядность 8 бит для действительных чисел и 8 бит для реальной и мнимой частей комплексных чисел, а 8-разрядные выходы некогерентных накопителей отображаются на 16-разрядные накопители в медленной памяти, причем перенос данных из 8-разрядных накопителей, расположенных в быстрой памяти, в медленную память производится путем периодического добавления содержимого 8-разрядных накопителей к содержимому 16-разрядных накопителей в медленной памяти, после чего содержимое 8-разрядных накопителей в быстрой памяти обнуляется.
10. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по п.8, отличающийся тем, что однопроцессорная вычислительная система построена на основе процессора фирмы Intel, при этом быстрая память приемника соответствует кэш-памяти процессора, и в процессе вычислений происходит обмен данными между кэш-памятью процессора и медленной памятью.
11. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по п.9, отличающийся тем, что многопроцессорная вычислительная система построена на основе многоядерного процессора фирмы Intel, при этом быстрая память приемника соответствует кэш-памяти ядра, и в процессе вычислений происходит обмен данными между кэш-памятью ядра и медленной памятью.
12. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по любому из пп.1-11, отличающийся тем, что блок поиска навигационных сигналов осуществляет поиск сигналов в две последовательные фазы, причем фаза поиска 1 соответствует процедуре поиска по п.1 и результаты фазы поиска 1 передаются на фазу поиска 2, в ходе которой принимается окончательное решение о наличии сигнала спутника и окончательная оценка его параметров, которые затем передаются в блок захвата и сопровождения навигационных сигналов и приема данных.
13. Приемник спутниковых навигационных сигналов с блоком быстрого и высокочувствительного поиска по любому из пп.1-5, отличающийся тем, что он выполнен в виде одно- или многопроцессорной вычислительной системы, реализованной в качестве встроенного процессорного ядра в микросхеме, при этом наиболее вычислительно-емкие блоки приемника, такие как БПФ и ОБПФ, выполнены в виде встроенных аппаратных ускорителей, размещенных в той же микросхеме.
| Устройство для пополнения запаса воздуха в воздушном колпаке гидравлического тарана | 1939 |
|
SU58745A1 |
| ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С УСТРОЙСТВОМ БЫСТРОГО ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ В УСЛОВИЯХ ВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2006 |
|
RU2341898C2 |
| СПОСОБ ПРОГРАММНОЙ ОБРАБОТКИ БУФЕРИЗОВАННЫХ ВЫБОРОК ОЦИФРОВАННЫХ СИГНАЛОВ И МУЛЬТИСИСТЕМНЫЙ МНОГОКАНАЛЬНЫЙ ПРОГРАММНЫЙ ПРИЕМНИК РЕАЛЬНОГО ВРЕМЕНИ СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ И СИСТЕМ ИХ ПОДДЕРЖЕК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2336631C2 |
| ПРИЕМНИК СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1997 |
|
RU2118054C1 |
| US 7061972 B1, 13.06.2006 | |||
| US 6091785 A, 18.07.2000 | |||
| US 5459473 A, 17.10.1995 | |||
| WO 2009130304 A1, 29.10.2009. | |||

