Описание
Настоящее изобретение относится к области коммуникаций. Более точно, настоящее изобретение относится к новому и улучшенному способу и устройству детектирования одного или более пилот-сигналов с использованием устройства поиска с программируемым согласованным фильтром.
В системах связи с расширением спектра и прямой модуляцией последовательности обычно используются псевдошумовые последовательности (PN; ПШ), например, в таких системах, которые описываются в стандарте IS-95 интерфейса связи через воздушное пространство, а также его производных, таких как стандарты IS-95-A и ANSI J-STD-008 (на которые здесь в дальнейшем ссылаются как на стандарт IS-95), опубликованные Ассоциацией производителей средств телекоммуникации (TIA; АПСТ) и используемые главным образом в сотовых телекоммуникационных системах. Стандарт IS-95 включает методы модуляции сигнала с множественным доступом с кодовым разделением каналов (CDMA, МДКР), для того чтобы одновременно осуществлять множественную связь по одной радиочастотной полосе. В сочетании с полным управлением мощностью и осуществлением множественных коммуникаций через одну и ту же полосу частот увеличивается общее число запросов и других коммуникаций, которые, кроме всего прочего, могут быть установлены в системе беспроводной связи посредством увеличения повторного использования частоты по сравнению с другими беспроводными телекоммуникационными технологиями. Использование МДКР методов в системах с множественным доступом с кодовым разделением каналов раскрывается в патенте США №4901307, озаглавленном: "SPREAD SPECTRUM COMMUNICATION SYSTEM USING SATELLITE OR TERRESTRIAL REPEATERS", а также в патенте США №5103459, озаглавленном: "SYSTEM AND METHOD FOR GENERATING SIGNAL WAVEFORMS IN A CDMA CELLULAR TELEPHONE SYSTEM", оба из которых переданы правопреемнику настоящего изобретения и включены здесь в качестве ссылки.
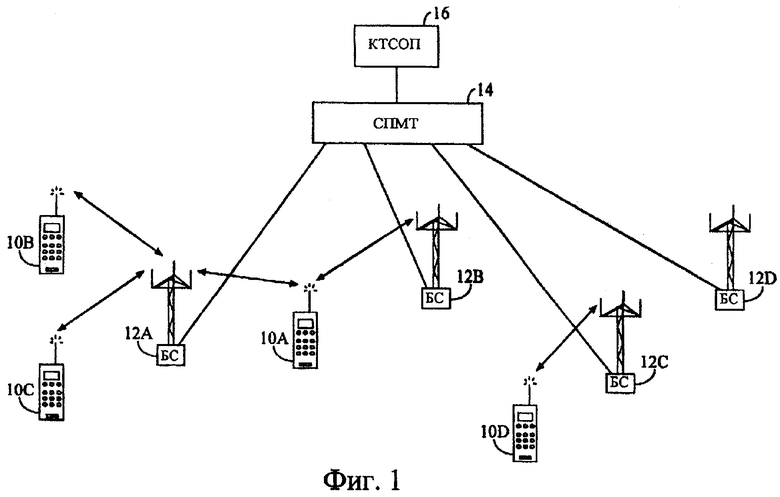
Фиг.1 представляет существенно упрощенную иллюстрацию сотовой телефонной системы, сконфигурированной в соответствии с использованием стандарта IS-95. В процессе функционирования ряд абонентских модулей 10а-d осуществляют беспроводную связь посредством установления одного или нескольких радиочастотных интерфейсов с одной или несколькими базовыми станциями 12a-d, используя МДКР модулированные радиочастотные сигналы. Каждый радиочастотный интерфейс между базовой станцией 12 и абонентским модулем 10 образуется из сигнала прямой линии связи, переданного из базовой станции 12, и сигнала обратной линии связи, переданного из абонентского модуля. При использовании таких радиочастотных интерфейсов связь с другим пользователем, вообще говоря, осуществляется с помощью службы переключения мобильной телефонной связи 14 (MTSO, СПМТ) и коммутируемой телефонной сети общего пользования 16 (PTSN, КТСОП). Линии связи между базовыми станциями 12, СПМТ 14 и КТСОП 16 обычно формируют с помощью проводных соединений, хотя также известно использование дополнительных радиочастотных или микроволновых линий связи.
Каждый абонентский модуль 10 устанавливает связь с одной или несколькими базовыми станциями 12, используя многоканальный приемник. Многоканальный приемник раскрывается в патенте США №5109390, озаглавленном: "DIVERSITY RECEIVER IN A CDSMA CELLULAR TELEPHONE SYSTEM", переданном правопреемнику настоящего изобретения и включенном здесь в качестве ссылки. Многоканальный приемник обычно изготавливается из одного или нескольких устройств поиска для определения прямого и многолучевого пилот-сигнала из ближайших базовых станций, и одного или нескольких выводов для приема и объединения информационных сигналов с этих базовых станций. Устройства поиска раскрываются в спаренном патентном описании США №08/316177, озаглавленном: "MULTIPATH SEARCH PROCESSOR FOR SPREAD SPECTRUM MULTIPLE ACCESS COMMUNICATION SYSTEMS", поданном 30 сентября 1994 г., переданном правопреемнику настоящего изобретения и включенном здесь в качестве ссылки.
При разработке систем связи с расширением спектра и прямой модуляцией последовательности неотъемлемое требование заключается в том, что приемник должен настраивать свою псевдошумовую последовательность с таковой у базовой станции. В стандарте IS-95 каждая базовая станция и абонентский модуль используют совершенно одинаковую псевдошумовую последовательность. Базовая станция отличает себя от других базовых станций посредством введения уникального смещения при генерации ее псевдошумовых последовательностей. В системах, разработанных согласно стандарту IS-95, все базовые станции смещаются на целое кратное 64 чипам. Абонентский модуль устанавливает связь с базовой станцией посредством присвоения этой базовой станции, по меньшей мере, одного вывода. Присвоенный вывод должен вводить подходящее смещение в его псевдошумовую последовательность для того, чтобы установить связь с этой базовой станцией. Также возможно различать базовые станции, используя для каждой станции уникальные псевдошумовые последовательности, а не смещения одной и той же псевдошумовой последовательности. В таком случае выводы должны настраивать свои псевдошумовые генераторы так, чтобы те генерировали подходящую псевдошумовую последовательность для базовой станции, к которой они присвоены.
Абонентские модули определяют положение базовых станций посредством использования устройств поиска. Скоростные, гибкие, а также эффективные в аппаратном отношении устройства поиска с согласованными фильтрами описываются в патенте США №09/283010 (упоминаемое здесь как описание '010), озаглавленном: "PROGRAMMABLE MATCHED FILTER SEARCHER", поданное 31 марта 1999 г., переданное правопреемнику настоящего изобретения и включенное здесь в качестве ссылки. Такие устройства поиска добавляют гибкость в характеристики параллельных вычислений для согласованного фильтра, допуская возможность выполнения с высокой скоростью варьируемого числа когерентных накоплений, а также варьируемого числа некогерентных накоплений для широкого диапазона поисковых гипотез с эффективным использованием ресурсов. Многие из характеристик такого устройства поиска применимы в целом для настоящего изобретения и будут обсуждаться более подробно ниже.
Федеральная комиссия связи (FCC; ФКС) установила, что к октябрю 2001 г. несущие частоты должны обеспечивать локализацию пользователя сотового телефона, осуществляющего аварийный запрос 911, с точностью в пределах 125 метров. В дополнение к обеспечению установленной службы сервиса, связанной с определением положения, беспроводные несущие частоты представляют интерес при обеспечении доходных служб сервиса, основанных на знании местоположения, таких как справочная информация о парковке вблизи дорог, обновление графика, справочный каталог "желтые страницы" и т.п.
Для решения этой проблемы могут быть предприняты различные подходы, среди которых имеются решения, основанные на использовании глобальной спутниковой системы навигации и определения положения (Global Positioning System, GPS). Глобальная система навигации и определения положения содержит группу из 24 спутников. Каждый спутник имеет часы, которые поддерживаются синхронизированными с GPS временем посредством мониторинга наземных станций. Для того чтобы определить положение и время, GPS приемники на земле могут использовать сигналы, принятые от нескольких GPS спутников.
Каждый GPS спутник передает две микроволновые несущие: несущую частоту L1=1575,42 МГц, которая переносит сигналы, используемые для службы сервиса определения положения общего назначения (SPS), а также несущую частоту L2=1227,60 МГц, которая переносит сигналы, необходимые для специальной службы сервиса точного определения положения (PPS). PPS используется правительственными учреждениями и позволяет обеспечить более высокую степень точности при позиционировании.
Несущая частота L1 модулируется кодом предварительного обнаружения (С/А), псевдослучайным кодом из 1023 чипов, передаваемым с частотой 1,023 миллиона циклов в секунду, который используется для навигационной службы гражданского назначения. Каждый GPS спутник имеет свой собственный С/А код, который повторяется каждую миллисекунду. Код, используемый для PPS, представляет собой код с частотой 10,23 МГц, имеющий длину 267 суток.
Каждый GPS спутник имеет отличающийся С/А код, который принадлежит к семейству кодов, называемых Золотыми кодами. Золотыми кодами пользуются потому, что кросс-корреляция между ними очень мала. Каждый GPS спутник генерирует уникальную последовательность С/А кодов. GPS приемник воспроизводит последовательность С/А кодов для отдельного спутника и осуществляет ее корреляцию с принятым сигналом по всем возможным смещениям. Когда корреляция найдена, начальное время кода называется нами временем прихода (ТОА, ВП) на приемник. Такое ВП является мерой дальности до спутника, со смещением, обусловленным рассогласованием между часами приемника и GPS временем. Время прихода также называется нами как псевдодальность. Как только псевдодальности от каждого из 4 спутников будут получены, местонахождение может быть рассчитано путем вычисления пересечения 4 сфер. Использование 4 спутников позволяет исключить неопределенность часов приемника.
Определение положения с помощью системы GPS может быть выполнено исключительно основываясь на сигналах, принятых с GPS спутников, как только что было описано, однако оно может быть также выполнено, используя гибридную схему. Такие гибридные схемы часто бывают полезными, когда доступна дополнительная информация, для того, чтобы уменьшить сложность задачи определения положения. Одним из примеров является беспроводная сеть, в которой базовая станция может предоставить информацию, чтобы ограничить требуемые окна поиска, или может предоставить точное время, соответствующее GPS времени. Одна из таких систем раскрывается в спаренном патентном описании США 09/187939, озаглавленном: "MOBILE COMMUNICATION SYSTEM WITH POSITION DETECTION TO FACILITATE HARD HANDOFF", поданном 6 ноября 1998 г., и переданном правопреемнику настоящего изобретения и включенному здесь в качестве ссылки.
Существует общая проблема в аппаратном обеспечении, необходимом для поиска МДКР пилот-сигналов (или им подобных), которые также необходимы для определения положения (как с использованием только GPS системы, так и некоторого гибрида). Однако в противоположность кодовым системам с единственным пилот-сигналом, таким, как, например, описывается в стандарте IS-95, кодовые системы с множественными пилот-сигналами, такие как система GPS, будут иметь присущие им преимущества исходя из возможности искать одновременно более, чем один код пилот-сигнала. Многие приборы, такие как абонентский модуль 10 на фиг.1, будут иметь необходимость выполнять оба типа поиска в процессе их нормального процесса функционирования. В уровне техники существует необходимость в скоростном, гибком, а также эффективном в аппаратном отношении устройстве поиска, которое объединяет поиск МДКР пилот-сигналов с поиском множественных пилот-сигналов для систем таких, как GPS система определения положения.
Предлагаются новые и усовершенствованные.способ и устройство для осуществления поиска. Такое устройство поиска объединяет возможность осуществления поиска множественных смещений одиночных пилот-сигналов, таких, которые встречаются в системе по стандарту IS-95/ с возможностью поиска множественных пилот-сигналов, таких, которые встречаются в глобальной системе навигации и определения положения (GPS). Оба типа поиска могут быть выполнены в одной архитектуре, объединяющей характеристики параллельного вычисления согласованного фильтра с гибкостью, обеспечивающей возможность выполнения варьируемого числа когерентных накоплений и варьируемого числа некогерентных накоплений с высокой скоростью для широкого диапазона поисковых гипотез с эффективным использованием ресурсов. Настоящее изобретение обеспечивает возможность параллельного использования структуры согласованного фильтра методом расщепления по времени для поиска множественных окон. В дополнение, устройство поиска обеспечивает возможность произвольной независимой демодуляции последовательности Уолша для каждого окна поиска. Подход, основанный на работе в режиме разделения времени, позволяет осуществлять произвольный поиск частоты для любого смещения.
Синфазные I и квадратурные Q данные канала сжимаются с использованием структуры согласованного фильтра. Структура согласованного фильтра может быть сконфигурирована как один большой согласованный фильтр с одним входом для синфазных/квадратурных (I/Q) данных, или же она может быть сконфигурирована так, чтобы принимать множество сигналов, по существу разделяя согласованный фильтр на множество меньших согласованных фильтров. Множество входных сигналов может быть множеством независимых сигналов из различных источников, таких как множество спутников в GPS сети.
Синфазные и квадратурные амплитуды, полученные из согласованного фильтра, подаются в когерентные накопители, чтобы суммироваться в течение программируемого отрезка времени. Такое когерентное накопление может происходить во всей структуре согласованного фильтра, или же может генерироваться множество накоплений на основе подмножества согласованных фильтров, связанных с каждым из множества входных сигналов. Такие когерентные накопления являются доступными для дальнейшей обработки в устройстве, таком, как цифровой сигнальный процессор (DSP, ЦСП).
Для случая поиска одиночного пилот-сигнала, когерентные накопления амплитуд возводятся в квадрат и суммируются, чтобы произвести измерение энергии. Результат измерения энергии накапливается в течение второго программируемого времени, для того, чтобы выполнить некогерентное накопление. Результирующее значение используется для определения вероятности пилот-сигнала при таком смещении.
Каждая структура согласованного фильтра содержит N-разрядный сдвиговый регистр для принимаемых данных, программируемый банк данных значений отводов линий задержек для выполнения сжатия спектра и произвольной демодуляции последовательности Уолша, а также структуру сумматора, чтобы суммировать результирующие вычисления отвода линии задержки фильтра. Структура согласованного фильтра дополнительно может быть использована в режиме разделения времени для поиска множественных окон, как задает мультиплексор, который подает различные потоки значений отводов линий задержек для сжатия спектра (с дополнительной демодуляцией последовательности Уолша, включенной в значения отводов линий задержек). Кроме того, для выполнения частотного поиска, может быть добавлен дополнительный фазовращатель, чтобы применять мультиплексированные фазовые значения. В каждом цикле вычислений структура согласованного фильтра производит промежуточные вычисления для конкретных смещений (с дополнительной демодуляцией последовательности Уолша и дополнительным вращением фазы), которые включают N вычислений, произведенных на основе данных в сдвиговом регистре.
В дальнейшем изобретение поясняется описанием конкретных вариантов его воплощения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает блок-схему сотовой телефонной системы;
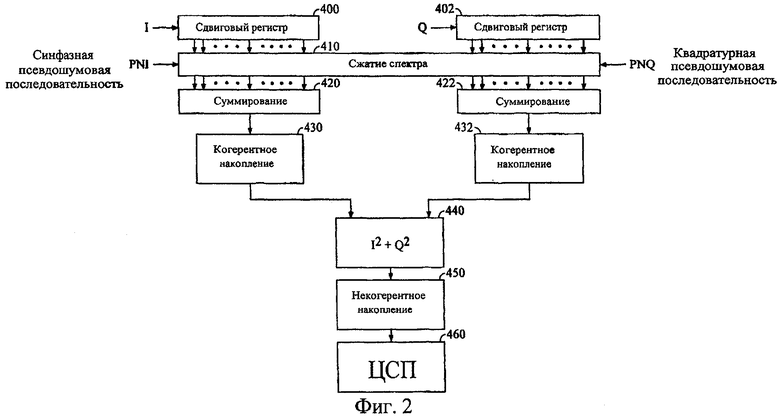
фиг.2 изображает блок-схему устройства поиска с программируемым согласованным фильтром уровня техники;
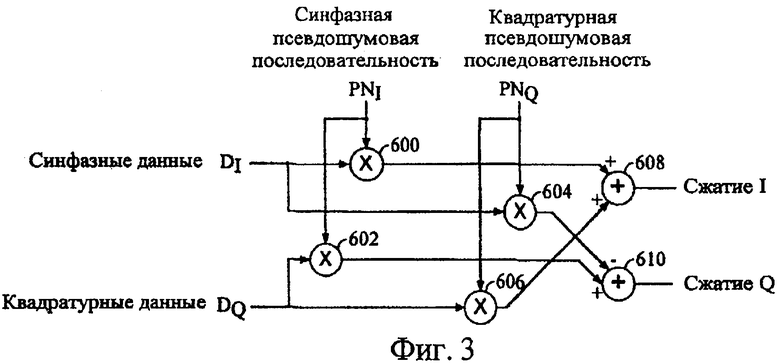
фиг.3 изображает КФМн устройство сжатия;
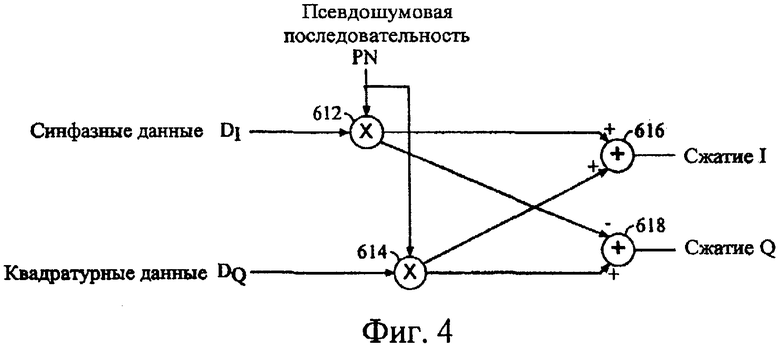
фиг.4 изображает ДПФМн устройство сжатия;
фиг.5 изображает блок-схему устройства поиска с согласованным фильтром, скомпонованную согласно настоящему изобретению;
фиг.6А-6Г содержат более подробную блок-схему, скомпонованную согласно настоящему изобретению.
Фиг.2 изображает упрощенную блок-схему устройства поиска, скомпонованную согласно изобретению, раскрытому в описании '010. Здесь повторяются признаки изобретения '010, за которыми следуют модификации, которые должны быть выполнены согласно настоящему изобретению. Один из отличительных признаков настоящего изобретения заключается в том, чтобы обеспечить возможность повышенной функциональности GPS поиска, вместе с тем используя архитектуру, которая очень похожа на изложенную в описании '010.
Синфазные I и квадратурные Q данные (здесь DI и DQ) поступают на сдвиговые регистры 400 и 402, соответственно. В настоящем изобретении размер компонента согласованного фильтра задается числом N - числом запоминаемых точек в сдвиговых регистрах. Данные непрерывно загружаются и сдвигаются в сдвиговых регистрах с постоянной частотой. В иллюстративном варианте воплощения данные загружаются при двойной частоте чипов. Это обеспечивает возможность поиска на каждом чипе и в границах половины чипа.
Затем данные в сдвиговых регистрах 400 и 402 коррелируются с участками размером N бит синфазной I и квадратурной Q псевдошумовых последовательностей (здесь PNI и PNQ), которые загружаются в устройство 410 сжатия. Для того чтобы сжать КФМн расширенный пилот-сигнал, осуществляется комплексное сжатие: (DI+jDQ)(PNI+jPNQ)=(DIPNI+DQPNQ)+j(DQPNI-DIPNQ). Фиг.3 представляет один каскад N-разрядного устройства сжатия спектра КФМн сигнала. Одно из N значений из DI данных умножается на соответствующее значение отвода линии задержки PNi в умножителе 600, и на соответствующее значение отвода линии задержки PNQ в умножителе 604. Аналогично, DQ умножается на значения отводов линий задержек PNI и PN2 в умножителях 604 и 606, соответственно. Выходной сигнал из умножителей 600 и 606 суммируется в сумматоре 608. Выходной сигнал из умножителя 604 вычитается из выходного сигнала умножителя 602 в сумматоре 610. Выходной сигнал сумматора 608 представляет собой сжатое значение синфазной I составляющей. Выходной сигнал сумматора 610 представляет собой сжатое значение квадратурной Q составляющей. Поскольку имеется N каскадов, будет получено N таких комплексных результатов.
Настоящее изобретение также подходит для ДПФМн сжатия спектра. В этом случае корреляцию необходимо выполнять только с одной (PN; ПШ) последовательностью, которая обеспечивает значения отводов линии задержек как для синфазных I, так и для квадратурных Q составляющих в устройстве 410 сжатия. Схема, изображенная на фиг.3, может быть использована с одной псевдошумовой последовательностью, вводимой как в ПШI, так и ГППQ. Фиг.4 изображает упрощенное устройство сжатия, которое может быть использовано, если требуется только ДПФМн сжатие спектра. Величины DI и DQ умножаются на псевдошумовую последовательность в умножителях 612 и 614, соответственно. Результаты суммируются в сумматоре 616 для того, чтобы произвести сжатое значение I. Выходной сигнал умножителя 612 вычитается из сигнала умножителя 614 в сумматоре 618, чтобы произвести сжатое квадратурное Q значение. Снова, поскольку имеется N каскадов, будет получено N таких комплексных результатов.
Хотя фиг.3 и фиг.4 изображают используемые умножители, в уровне техники известны упрощенные схемы. Когда значения отводов линий задержек являются двоичными, такими, как приведены в иллюстративном примере, т.е. состоящими только из значений 1 и -1, и для DI и DQ выбран подходящий формат данных, шаг сжатия спектра может быть выполнен, используя только логический элемент «исключающее ИЛИ» и мультиплексоры (подробности не показаны).
N сжатых синфазных I и квадратурных Q значений, произведенных в устройстве 410 сжатия, суммируются соответственно в сумматорах 420 и 422. Каждый раз, когда изменяются данные в сдвиговых регистрах 400 и 402, в сумматорах 420 и 422 вычисляются новые суммы, как показано на фиг.2. Каждая сумма представляет собой когерентное накопление N-чипов для определенного смещения. В устройстве 410 сжатия процесс повторяется для программируемого числа циклов без изменения значений отводов линий задержек. Например, в иллюстративном варианте воплощения, размерность согласованного фильтра N равна 64. Предположим, что требуемый размер окна поиска L равен 64, а когерентного накопления С - равен 256. В этом случае значения отводов линий задержек, подходящие для начала окна, загружаются в устройство 410 сжатия, а данные циклически переставляются в сдвиговом регистре, производя результаты на выходе сумматоров 420 и 422 в каждом цикле.
Каждый результат загружается в когерентные накопители 430 и 432, соответственно. Эти накопители принимают множественные накопления за один раз. В иллюстративном варианте воплощения накопители основаны на ЗУПВ. В течение каждого цикла, соответствующее парциальное накопление обновляется, добавляется к выходному сигналу какого-то сумматора 420 или 422, а результирующее парциальное накопление опять сохраняется в ЗУПВ. В нашем примере, когда прошли 64 цикла, первые 64 синфазные I и квадратурные Q суммы будут загружены в накопители 430 и 432. Каждая из таких сумм соответствует величине С, равной 64, поскольку она является шириной согласованного фильтра.
В течение этого времени для устройства 410 сжатия оказывается вычисленным новый набор значений отводов линий задержек. Они рассчитываются таким образом, чтобы та же гипотеза смещения на 64, которая была опробована в первом прохождении, могла быть опробована еще раз. Если значения отводов линий задержек не изменились, должно быть испытано новое смещение с каждым циклом, до тех пор, пока не будет охвачено поиском все псевдошумовое пространство (подобно обычному поисковому устройству с согласованным фильтром). Процедура согласования фильтра повторяется снова для других 64 циклов. В это время каждый результат суммируется с соответствующим парциальным накоплением для его смещения, которые сохранены в накопителях 430 и 432. После прохождения 64 циклов каждое парциальное накопление составляется из двух парциальных накоплений из 64 чипов, что соответствует величине С, равной 128. Такой процесс повторяется дважды, с изменением значений отводов линий задержек каждый раз до тех пор, пока накопители не накопят четыре значения по 64 чипа для требуемой величины С, равной 256. В такой конфигурации устройство поиска может выполнять когерентное накопление для любой величины С, которая является целым кратным от N. Размер окна, который одновременно может искаться, определяется числом парциальных накоплений, которые могут быть сохранены в накопителях 430 и 432. (Верхняя граница для С определяется числом бит для используемой точности и методами масштабирования, если они вообще используются. Специалист может легко сконструировать схемы, которые подберут требуемое значение С).
Загрузка псевдошумовых значений отводов линий задержек выполняется следующим образом. Псевдошумовые последовательности будут генерироваться по-разному, в зависимости от того, проверяется одна и та же гипотеза, или начинается проверка новой. В иллюстративном варианте воплощения псевдошумовые последовательности генерируются псевдошумовыми генераторами на основе сдвигового регистра с линейной обратной связью (LFSR, СРЛОС). Осуществление синхронизации генерации значений отводов линий задержек лучше всего поясняется примером. В иллюстративном варианте воплощения согласованный фильтр имеет ширину N значений, так что должна генерироваться последовательность значений отводов линий задержек из N бит. Для простоты мы будем предполагать, что изменения данных происходят с частотой чипов, равной частоте, с которой должны обновляться псевдошумовые генераторы. Это отличается от иллюстративного варианта воплощения, в котором данные обновляются с удвоенной частотой чипов, так что две выборки данных коррелируют с каждым состоянием псевдошумового генератора. Предположим, что мы хотим накопить величину С, равную 192 значениям, для размера окна, равного 128. Положим, что наш псевдошумовой генератор прогенерировал соответствующие первые 64 синфазных I и квадратурных Q значения отводов линий задержек, которые загружаются в устройство 410 сжатия. 64 набора данных будут циклически сдвигаться в сдвиговых регистрах 400 и 402. Для каждого набора вычисляется когерентная I сумма из 64 значений и сохраняется в когерентном накопителе 430, а когерентная Q сумма из 64 значений вычисляется и сохраняется в накопителе 432. Каждая из когерентных сумм соответствует одной из первых гипотез 64 последовательных смещений, для которой осуществляется поиск. Поскольку требуется величина С=192, вышеупомянутые 64 цикла должны быть повторены 3 раза, чтобы достичь 192. Однако для того чтобы соответствующим образом выстроить псевдошумовые значения отводов линий задержек, в устройстве 410 сжатия для входных данных должны быть сделаны соответствующие шаги. Нам хотелось бы, чтобы одни и те же смещения проверялись вновь, чтобы произвести второй набор когерентных значений. Псевдошумовые генераторы используются для того, чтобы создать продвижение вперед входных данных на 64 чипа. Нам также нужно загрузить новый набор из 64 чипов псевдошумовых значений вперед, чтобы повторно проверить те же смещения. Такие значения создаются псевдошумовыми генераторами тогда, когда генерируются первые 64 суммы. Процесс повторяется для третьего набора, чтобы создать третьи когерентные накопления из 192 чипов.
Теперь выполнены вычисления для первой половины окна поиска. Снова псевдошумовые генераторы используются для того, чтобы создать продвижение вперед входных данных на 64 чипа. Если бы мы загрузили аналогичную опережающую псевдошумовую последовательность в устройство 410 сжатия, мы собрали бы больше данных на первых 64 смещениях, что необязательно для данного примера. Вместо этого мы хотим внести смещение, равное 64, чтобы проверить следующие 64 смещения. Это мы можем сделать просто, не обновляя псевдошумовые значения (поскольку псевдошумовая последовательность во входящих данных опережает значения, находящиеся в устройстве 410 сжатия). Когда первые 64 вычисления выполняются для второй половины окна, в устройство 410 сжатия должен быть загружен новый набор псевдошумовых значений, для того, чтобы собрать больше данных для тех же самых смещений, как было только что описано выше. Такой процесс продолжается до тех пор, пока не будет накоплено 192 чипов данных.
Когда когерентные накопления синфазных I и квадратурных Q данных завершаются, как только что описано, результирующие значения возводятся в квадрат и суммируются (I^2+Q^2}, как изображено, в вычислителе 440 энергии. Результат для каждого смещения загружается в некогерентный накопитель 450. Такой накопитель является многоканальным накопителем, подобным накопителям 430 и 432. Для программируемого числа некогерентных накоплений, М, значения независимых некогерентных накоплений накапливаются для каждого смещения в окне поиска. Каждый раз энергия накапливается в некогерентном накопителе 450, парциальные накопления в когерентных накопителях 430 и 432 сбрасываются для других вычислений величины С.
Специалист сможет легко использовать неисчислимое множество решений для обработки результатов, сохраненных в некогерентном накопителе 450. В иллюстративном варианте воплощения результаты из некогерентного накопителя 450 передаются в ЦСП 460, где значения проверяются, чтобы установить, какое смещение в окне поиска, если оно вообще имеет место, правдоподобно соответствует положению пилот-сигнала. Процессор ЦСП 460, который может быть любым ЦСП или микропроцессором, способным выполнять требуемые операции, может управлять всеми процедурами поиска, осуществляемыми согласованным фильтром. Он может быть специализированным для устройства поиска, или же функции поиска могут составлять только часть различных задач, которые выполняет ЦСП 400 при функционировании абонентского модуля. При необходимости, весь вышеописанный процесс может быть повторен для множественных окон поиска.
Фиг.5 изображает устройство поиска из фиг.2, модифицированное согласно настоящему изобретению. Объекты, обозначенные одинаковыми позициями, идентичны на двух фигурах; и ниже будут подробно описываться модификации.
N-разрядные сдвиговые регистры 400 и 402 из фиг.2 были заменены серией М-разрядных сдвиговых регистров 401А-К и 403А-К, соответственно. Каждый М-разрядный сдвиговый регистр 401А-К и 403А-К имеет переключаемый вход, который может быть установлен таким образом, чтобы выбирать GPS входной сигнал (от GPSI1-k и GPSQ1-k, соответственно), или выходной сигнал из предшествующего М-разрядного сдвигового регистра (исключая начальные регистры 401А и 4О3А, которые выбирают МДКР I и Q последовательности, соответственно).
Когда устройство сконфигурировано для поиска МДКР пилот-сигнала, как описано выше, каждый М-разрядный регистр конфигурируется так, чтобы выбирать в качестве своего входного сигнала выходной сигнал из предшествующего М-разрядного регистра (исключая начальные регистры 401А и 403А, которые выбирают МДКР I и Q последовательности, соответственно). В этом режиме М-разрядные сдвиговые регистры 401А-К и 403А-К функционируют идентично с М-разрядными сдвиговыми регистрами 400 и 402, соответственно, которые они замещают.
Когда устройство сконфигурировано для поиска GPS сигнала, каждый М-разрядный сдвиговый регистр 401А-К или 403А-К выбирает в качестве своего входного сигнала синфазную или квадратурную составляющую GPS сигнала, которую нужно декодировать, а именно GPSI1-k и GPSQ1-k, соответственно. Специалисту должно быть понятно, что возможно множество разнообразных конфигураций М-разрядных регистров. Например, когда доступы К регистров, а необходимо искать только К/2 пилот-сигналов, К регистра могут быть сконфигурированы парами, чтобы сформировать К/2 2М-разрядных регистров. Лица, внедряющие настоящее изобретение, могут выбрать степень независимости программируемости переключаемых входов М-разрядных сдвиговых регистров 401А-К и 403А-К, чтобы удовлетворить их специфическим требованиям.
Затем выходные сигналы из М-разрядных сдвиговых регистров 401А-К и 403А-К сжимаются в устройстве 410 сжатия вышеописанным способом, со ссылкой на фиг.3 и фиг.4. Псевдошумовые последовательности для сжатия спектра выбираются исходя из того, требуется ли поиск МДКР пилот-сигнала, либо GPS пилот-сигнала. Подходящие коды загружаются в устройство 410 сжатия. На фиг.5 в качестве входных кодов в устройство 410 сжатия изображены только единственный синфазный код (PNI) и единственный квадратурный код (PNQ). Такая конфигурация требует, чтобы К GPS кодов концентрировались и загружались последовательно. Специалисту должно быть известно, как обеспечить дополнительные значения отводов линий задержек, чтобы обеспечить возможность загружать множественные секции устройства сжатия кодами GPS или МДКР; и такая возможность подробно описывается ниже со ссылкой на фиг.6Г. (Следует иметь в виду, что поиск МДКР и GPS пилот-сигналов является опцией, выбранной в иллюстративном варианте воплощения настоящего изобретения. Специалисту должно быть понятно, что настоящее изобретение легко применимо для других ситуаций, в которых необходимо осуществлять поиск варьируемого числа источников с варьируемым числом различных псевдошумовых последовательностей).
Сумматоры 420 и 422 на фиг.2 заменяются на фиг.5 парциальными сумматорами 421А и 423А, с последующими дополнительными сумматорами 421В и 423В. Сумматор 421А вычисляет К сумм сжатых синфазных результатов, а сумматор 423А вычисляет К сумм сжатых квадратурных по фазе результатов. Данные результаты являются полными суммами, когда устройство поиска функционирует в GPS режиме, и результаты подаются в мультиплексор 433 и мультиплексор 434, соответственно. Когда устройство поиска сконфигурировано для поиска МДКР пилот-сигнала, К сумм представляют парциальные суммы; они должны быть просуммированы в сумматорах 421В и 423В, соответственно. Результаты сумматоров 421В и 423В подаются в мультиплексоры 433 и 434.
Мультиплексоры 433 и 434 используются для того, чтобы осуществлять переключение между парциальными суммами (которые представляют полные суммы для К индивидуальных GPS пилот-сигналов) и полной суммой, используемой для поиска МДКР пилот-сигналов. Результаты подаются в когерентные накопители 430 и 432, соответственно. В МДКР режиме когерентные накопители 430 и 432 функционируют так, как было описано выше, со ссылкой на фиг.2. Без модификации, в GPS режиме полезными являются только элементы памяти накопителей - результаты должны подаваться в процессор, такой как ЦСП 460, как изображено для когерентного накопления. Другой возможный вариант заключается в том, чтобы сконструировать когерентные накопители 430 и 432 программируемым образом так, чтобы интегральные сумматоры (не показаны) могли быть переконфигурированы, чтобы производить К накоплений тогда, когда выполняется GPS поиск. В любом случае, в иллюстративном варианте воплощения результаты подаются в ЦСП 460 для вычисления энергии, некогерентного накопления, детектирования пика, а также другой обработки, необходимой для определения псевдодальности. Это не является обязательным, поскольку может быть развернуто аппаратное обеспечение, используемое для детектирования МДКР пилот-сигнала, чтобы также вычислять значения для GPS детектирования. Однако скорее не один маршрут, как в случае МДКР, а К маршрутов должно быть сконструировано, чтобы дать К требуемых результатов. Для этого потребовалось бы в К раз больше аппаратного обеспечения, или увеличение в К раз скорости обработки (если бы существующее аппаратное обеспечение работало бы в режиме разделения по времени).
Результаты из когерентных накопителей 430 и 432 подаются в вычислитель 440 энергии, некогерентный накопитель 450, а затем в ЦСП 460 для обработки способом, описанным выше со ссылкой на фиг.2.
Фиг.6А-6Г изображают иллюстративный вариант воплощения настоящего изобретения. Данный вариант воплощения сконфигурирован так, чтобы поддерживать МДКР поиск, или одновременный поиск восьми GPS спутников с минимальным воздействием или увеличением в аппаратном обеспечении, требуемом для МДКР устройства поиска, раскрытого в описании '010.
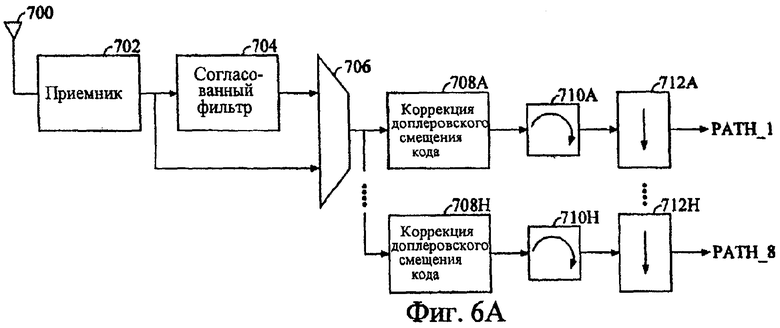
На фиг.6А принимаемые сигналы поступают на антенну 700, и задачи радиочастотной обработки, такие как усиление, преобразование с понижением частоты, преобразование аналогового сигнала в цифровой, выполняются в приемнике 702. Результаты подаются в дополнительный согласованный фильтр 704 и мультиплексор 706. Мультиплексор 706 выбирает отфильтрованную или не отфильтрованную версию, которая должна обрабатываться посредством восьми GPS устройств предварительной обработки, содержащих блоки 708A-G, 710A-G и 712A-G. Блоки 708А-Н коррекции доплеровского смещения кодового сигнала принимают сигнал из мультиплексора 706. Результирующие кодовые сигналы с корректированным доплеровским смещением обрабатываются во вращателях 710А-Н, соответственно, чтобы согласовать независимые эффекты доплеровского смещения частоты от восьми спутников. Эти результирующие сигналы вычисляются в вычислителях 712А-Н. Вычисление не является обязательным. В иллюстративном варианте воплощения цифровые синфазные (I) и квадратурные (Q) выборки, поступающие из приемника 702, дискретизируются с частотой чипов х 8, или восьмикратной частотой чипов. Иллюстративные вычислители 712А-Н обеспечивают выходные сигналы, которые могут быть с частотой чипов х 8 (без прореживания), чипов х 4, или чипов х 2. Выходные сигналы вычислителей 712А-Н обозначены символами от РАТН_1 до РАТН_8, соответственно.
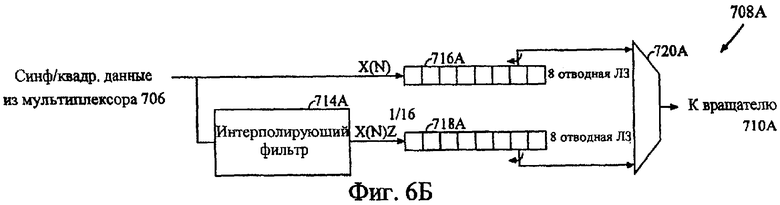
Фиг.6Б изображает иллюстративный блок коррекции доплеровского смещения кодового сигнала. Он помечен как блок коррекции доплеровского смещения кодового сигнала 708А, однако он является типичным для блоков 708А-Н. Синфазные и квадратурные данные из мультиплексора 706 поступают и подаются в линию 716А задержки с отводами, в которой в иллюстративном варианте воплощения имеется восемь значений отводов. Синфазные и квадратурные данные также поступают в дополнительный интерполирующий фильтр 714А. Выходной сигнал из интерполирующего фильтра 714А подается в линию 718А задержки с отводами, также содержащую 8 значений отводов в иллюстративном варианте воплощения. Каждый выход отводов линий 716А и 718А задержек селективно управляется посредством ЦСП (ЦСП 820 на фиг.6В). Мультиплексор 720А переключает выходы каждого отвода линий 716А или 716В задержек и подает выходной сигнал во вращатель 710А, как описано выше.
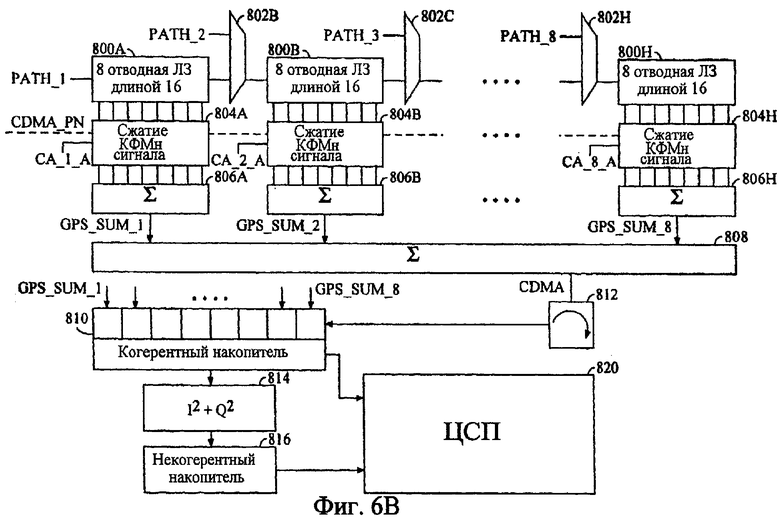
На фиг.6В сигналы РАТН_2-РАТН_8 изображены поступающими на мультиплексоры 802В-Н, соответственно. Эти мультиплексоры используются, чтобы переключать входы к отводам линий задержек (ЛЗ) 800В-Н между сигналами РАТН_2-РАТН_8 и выходным сигналом предшествующей ЛЗ, 800A-G, соответственно. Сигнал РАТН_1 проходит прямо в ЛЗ 800А. Специалист может представить средство программирования всего маршрута от антенны 700 к РАТН_1 так, чтобы этот вариант представлял данные поиска МДКР пилот-сигнала или данные для одного из восьми GPS пилот-сигналов. Каждая из ЛЗ 800А-Н имеет длину, равную 16, с 8 отводами. Это дает возможность проводить расчеты на границах половинок чипов. Результаты из каждой ЛЗ 800А-Н направляются в КФМН устройства сжатия 804А-Н, в которых осуществляется сжатие с любой псевдошумовой последовательностью для поиска МДКР пилот-сигнала, отмеченного как CDMA PN, или одной из GPS последовательностей СА_1_А-СА_8_А предварительного обнаружения.
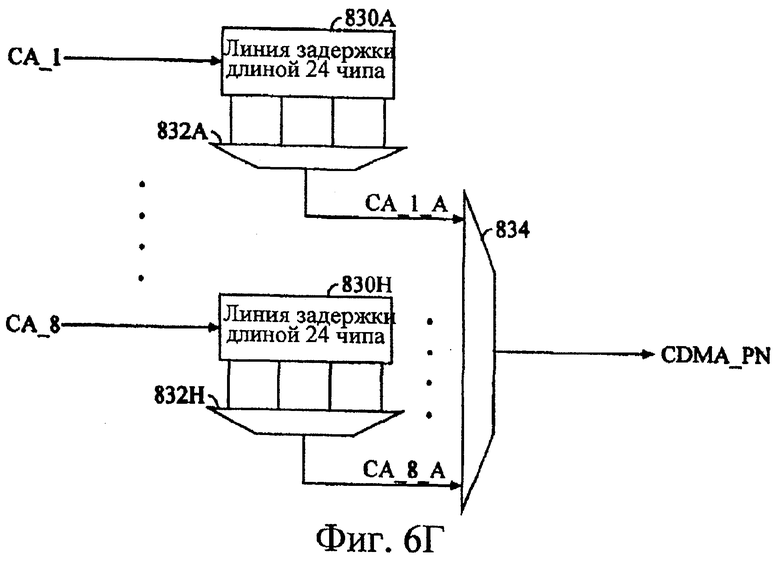
В качестве альтернативы, как изображено в отношении устройства 410 сжатия на фиг.5, коды СА_1_А-СА_8_А могут упорядоченно подаваться на одиночный связанный вход на устройства 804А-Н сжатия, как изображено, через вход CDMA_PN. В иллюстративном варианте воплощения, как изображено на фиг.6В, каждая из последовательностей СА_1_А-СА_8_А подается прямо на устройства 804А-Н сжатия, соответственно. Генерация таких последовательностей изображена на фиг.6Г. Отдельные генераторы золотых кодов для каждого канала (не показаны) генерируют последовательности СА_1 -СА_8, которые подаются в линии задержки 830А-Н. Каждая из таких линий задержки имеет длину 24, с отводами в положениях 0, 4, 8, 16 и 24. Выходы этих отводов переключаются мультиплексорами 832А-Н с частотой чипов х 8, чтобы произвести сигналы СА_1_А -СА_8_А. Это позволяет каждому GPS каналу осуществлять поиск в пределах до четырех смежных окон, стягивая в процессе предварительного поиска 16 гипотез с чипами х 2 в каждом из интервалов по восемь чипов. Для того чтобы конкатенировать эти последовательности для подачи в КФМн устройство 804А сжатия через вход CDMA_PN, используется мультиплексор 834.
Сжатые результаты подаются в сумматоры 804А-Н, чтобы произвести значения, обозначенные как GPS_sum_l-GPS_sum_8. Эти значения являются доступными для накопления в когерентном накопителе 810. В МДКР режиме эти значения представляют парциальные суммы и должны быть просуммированы в сумматоре 808. Результирующий сигнал обозначается как CDMA (МДКР). Сигнал CDMA (МДКР) может быть повернут во вращателе 812 (этот блок является необязательным), а результат является также доступным для когерентного накопителя 810. Когерентные накопители переключаются между GPS суммами или значениями CDMA (МДКР) в зависимости от текущего режима работы. Результаты когерентного накопления подаются в ЦСП 820 в процессе GPS поиска. В процессе МДКР поиска результаты когерентного накопления подаются в вычислитель 814 энергии. Эти результаты проходят на некогерентный накопитель 816, а с его выхода подаются в ЦСП 820. (Заметим, что может иметь место другая обработка аппаратными средствами после некогерентного накопления, отличающаяся от обработки в ЦСП, как обсуждается в описании '010).
Итак, описаны способ и устройство поиска с программируемым согласованным фильтром для поиска множественных пилот-сигналов. Описание представлено для того, чтобы дать возможность любому специалисту реализовать или использовать настоящее изобретение. Специалист может легко представить различные модификации данных вариантов воплощения, а основополагающие принципы, изложенные здесь, могут быть применены к другим вариантам воплощения без использования изобретательского права. Таким образом, настоящее изобретение не должно ограничиваться вариантами воплощения, представленными здесь, но должно соответствовать более широким рамкам в соответствии с принципами и отличительными признаками, изложенными здесь.
Изобретение относится к области коммуникаций. Устройство поиска объединяет возможность осуществлять поиск множественных смещений одиночных пилот-сигналов, таких, которые встречаются в системе по стандарту IS-95, с возможностью искать множественные пилот-сигналы, такие, которые встречаются в глобальной системе навигации и определения положения (GPS). Оба типа поиска могут быть выполнены в одной архитектуре, объединяющей характеристики параллельного вычисления согласованного фильтра с гибкостью, обеспечивающей возможность выполнения варьируемого числа некогерентных накоплений с высокой скоростью для широкого диапазона поисковых гипотез с эффективным использованием ресурсов. Технический результат заключается в параллельном использовании структуры согласованного фильтра методом разделения по времени для поиска множественных окон, а также в произвольной независимой демодуляции последовательности Уолша для каждого окна поиска. При работе в режиме временного разделения осуществляется поиск для любого смещения. 4 н. и 10 з.п. ф-лы, 9 ил.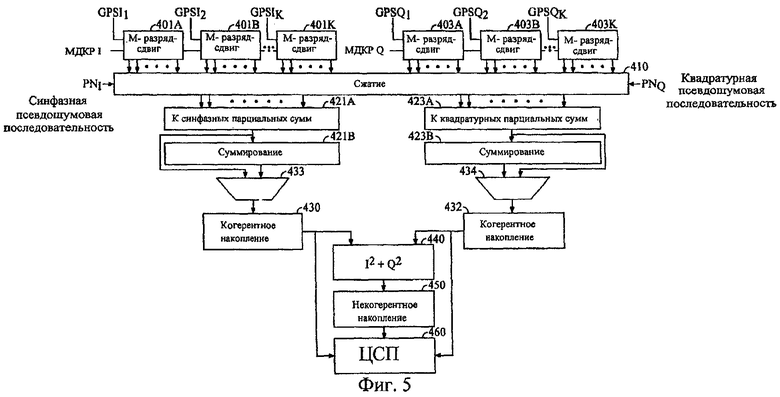
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 5577025, 19.11.1996 | |||
| US 5715276, 03.02.1998 | |||
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ С КОДОВЫМ УПЛОТНЕНИЕМ СИГНАЛОВ | 1991 |
|
RU2014738C1 |

