Предпосылки к созданию изобретения
Известны тележки для погрузки-разгрузки материалов, которые содержат отборники, расположенные на низком уровне. Такая тележка содержит силовой агрегат, батарейный отсек, содержащий батарею, опорную стенку (опорную спинку сиденья) и набор вилочных захватов, идущих в направлении удаления от опорной стенки. Сквозной отсек оператора (или платформа) расположен между батарейным отсеком и опорной стенкой. Оператор, при нахождении внутри отсека оператора, может управлять скоростью, торможением и направлением движения тележки при помощи рукоятки управления.
Известно, что стационарная ступенька может быть расположена на опорной стенке со стороны отсека оператора. Известно также, что поворотная ступенька может быть расположена на стенке батарейного отсека, образующей внутреннюю стенку отсека оператора. При этом, поворотная ступенька не расположена рядом с внешней периферийной кромкой тележки, то есть в непосредственной близости от нее. Она также не идет в направлении опорной стенки и не входит в зацепление с ней.
Желательно создать усовершенствованную конструкцию со ступенькой, позволяющую оператору легче получать доступ к верхней ячейке стеллажа.
Сущность изобретения
В соответствии с первым аспектом настоящего изобретения, предлагается тележка для погрузки-разгрузки материалов, которая содержит раму, содержащую отсек оператора, имеющий по меньшей мере один вход и пол. Тележка дополнительно содержит по меньшей мере одну ступеньку, которая выполнена с возможностью расположения поперек входа, со смещением (на расстоянии) от указанного пола, так что оператор может встать на указанную ступеньку, когда указанная ступенька расположена поперек входа, чтобы получать доступ к верхней ячейке стеллажа.
Ступенька может быть выполнена с возможностью перемещения между развернутым положением, в котором указанная ступенька расположена поперек входа, и транспортным положением, в котором ступенька расположена так, чтобы не блокировать вход в отсек оператора и выход из него.
Ступенька может скользить между развернутым и транспортным положениями. Предусмотрено также, что ступенька может совершать поворот между развернутым и транспортным положениями.
Ступенька может находиться в нижнем положении, когда она развернута, и в верхнем положении, когда она убрана. Смещающий элемент может быть объединен со ступенькой для содействия оператору в перемещении указанной ступеньки из нижнего положения в верхнее положение.
Отсек оператора может дополнительно содержать первую и вторую противоположные стенки и упор, соединенный с первой стенкой, Ступенька может быть шарнирно соединена на первом конце со второй стенкой. Второй конец ступеньки может входить в зацепление с упором, когда указанная ступенька перемещена в нижнее положение. Ступенька может иметь длину, которая ориентировочно равна промежутку между первой и второй противоположными стенками. Первая стенка может быть опорной стенкой, а вторая стенка может быть стенкой батарейного отсека. Альтернативно, первая стенка может быть стенкой батарейного отсека, а вторая стенка может быть опорной стенкой.
Стопорный механизм может быть объединен со второй стенкой, для блокирования ступеньки, с возможностью освобождения, когда ступенька была перемещена в верхнее положение.
Тележка может дополнительно иметь ведущее колесо, соединенное с рамой, двигатель, соединенный с ведущим колесом для осуществления вращения ведущего колеса, контроллер для управления работой приводного двигателя, и датчик, объединенный со ступенькой. Датчик может подавать сигнал на контроллер, когда ступенька находится в состоянии перемещения. Контроллер преимущественно подает сигнал возбуждения на двигатель только тогда, когда сигнал состояния перемещения вырабатывается при помощи датчика.
Ступенька может быть расположена над полом на расстоянии ориентировочно от 250 мм до 450 мм.
Отсек оператора может представлять собой сквозной отсек оператора, имеющий первый и второй входы. Первая ступенька может быть выполнена с возможностью установки поперек указанного первого входа, со смещением от пола. Вторая ступенька может быть выполнена с возможностью установки поперек второго входа, со смещением от указанного пола. Оператор может стоять на одной из первой и второй ступенек, когда одна из ступенек расположена поперек соответствующего одного из первого и второго входов, чтобы получить доступ в верхнюю ячейку стеллажа.
Первая ступенька может быть выполнена с возможностью перемещения между развернутым положением, в котором первая ступенька расположена поперек первого входа, и транспортным положением, в котором первая ступенька расположена так, чтобы не блокировать первый вход в отсек оператора. Вторая ступенька может быть выполнена с возможностью перемещения между развернутым положение, в котором вторая ступенька расположена поперек указанного второго входа, и транспортным положением, в котором вторая ступенька расположена так, чтобы не блокировать второй вход в отсек оператора.
В соответствии со вторым аспектом настоящего изобретения, предлагается тележка для погрузки-разгрузки материалов, которая содержит раму, содержащую отсек оператора, имеющий по меньшей мере один вход и пол, ведущее колесо, соединенное с рамой, двигатель, соединенный с ведущим колесом для осуществления вращения ведущего колеса, контроллер для управления работой двигателя, по меньшей мере одну ступеньку, объединенную с рамой, и по меньшей мере один датчик, объединенный со ступенькой. Ступенька выполнена с возможностью перемещения между развернутым положением, в котором оператор может встать на ступеньку и получить доступ к верхней ячейке стеллажа, и транспортным положением, в котором ступенька хранится в труднодоступном местоположении. По меньшей мере один датчик преимущественно объединен со ступенькой, чтобы подавать сигнал на контроллер, когда ступенька находится в состоянии перемещения. Контроллер преимущественно подает сигнал возбуждения на двигатель только тогда, когда вырабатывается сигнал состояния перемещения при помощи по меньшей мере одного датчика.
Ступенька может быть выполнена с возможностью скольжения между развернутым и транспортным положениями. Предусмотрено также, что ступенька может быть выполнена с возможностью поворота между развернутым и транспортным положениями.
Ступенька может находиться в нижнем положении, когда она развернута, и в верхнем положении, когда она убрана. Смещающий элемент может быть объединен со ступенькой для содействия оператору в перемещении указанной ступеньки из нижнего положения в верхнее положение.
Отсек оператора может дополнительно содержать первую и вторую стенки. Упор может быть соединен с первой стенкой. Ступенька может быть шарнирно соединена на первом конце со второй стенкой. Второй конец ступеньки может входить в зацепление с упором, когда ступенька перемещена в нижнее положение. Первая стенка может быть опорной стенкой, а вторая стенка может быть стенкой батарейного отсека. Альтернативно, первая стенка может быть стенкой батарейного отсека, а вторая стенка может быть опорной стенкой.
Стопорный механизм может быть объединен со второй стенкой, для блокирования ступеньки, с возможностью освобождения, когда ступенька была перемещена в верхнее положение.
Ступенька может содержать поверхность кулачка. Датчик может содержать микропереключатель, который приводится в действие при помощи поверхности кулачка.
В соответствии с другим вариантом, ступенька содержит флажок, а датчиком может быть датчик приближения, который приводится в действие при помощи флажка.
Могут быть предусмотрены первая и вторая ступеньки. Первая ступенька может быть выполнена с возможностью перемещения между развернутым положением, в котором оператор может встать на первую ступеньку и получить доступ к верхней ячейке стеллажа, и транспортным положением, в котором первая ступенька хранится в труднодоступном местоположении. Вторая ступенька может быть выполнена с возможностью перемещения между развернутым положением, в котором оператор может встать на вторую ступеньку и получить доступ к верхней ячейке стеллажа, и транспортным положением, в котором вторая ступенька хранится в труднодоступном местоположении.
Краткое описание чертежей
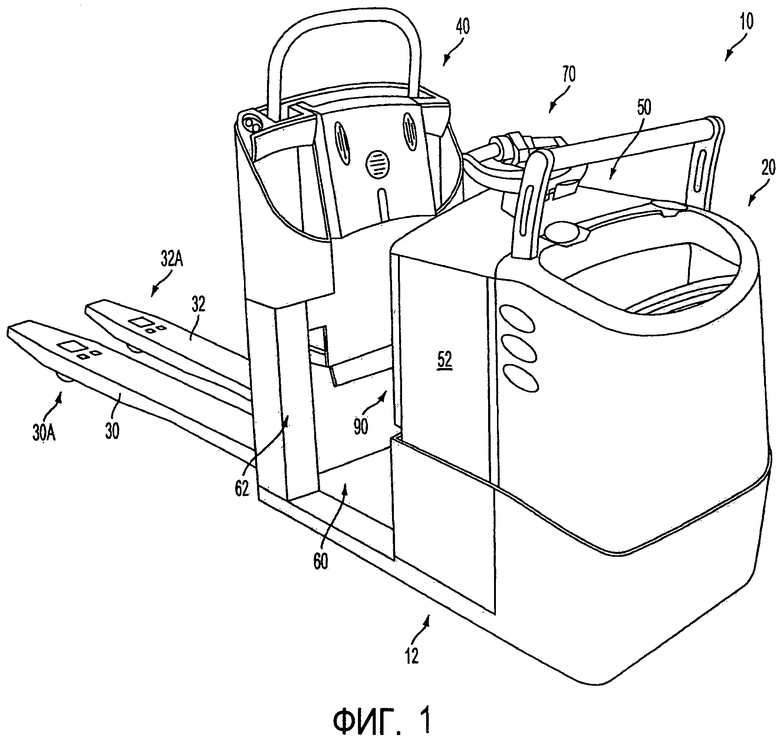
На фиг.1 показан вид в перспективе тележки для погрузки-разгрузки материалов, которая содержит узлы первой и второй ступенек (упор для узла второй ступеньки не показан), сконструированные в соответствии с первым вариантом настоящего изобретения.
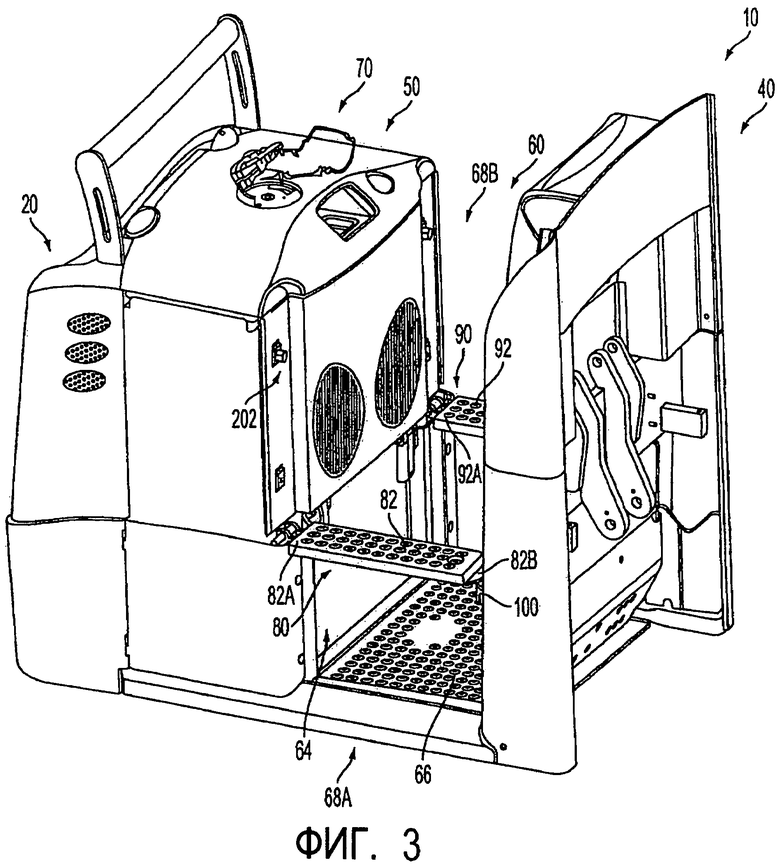
На фиг.2 и 3 показан вид в перспективе тележки для погрузки-разгрузки материалов, показанной на фиг.1, с удаленными вилочными захватами, которая содержит узлы первой и второй ступенек, сконструированные в соответствии с первым вариантом настоящего изобретения.
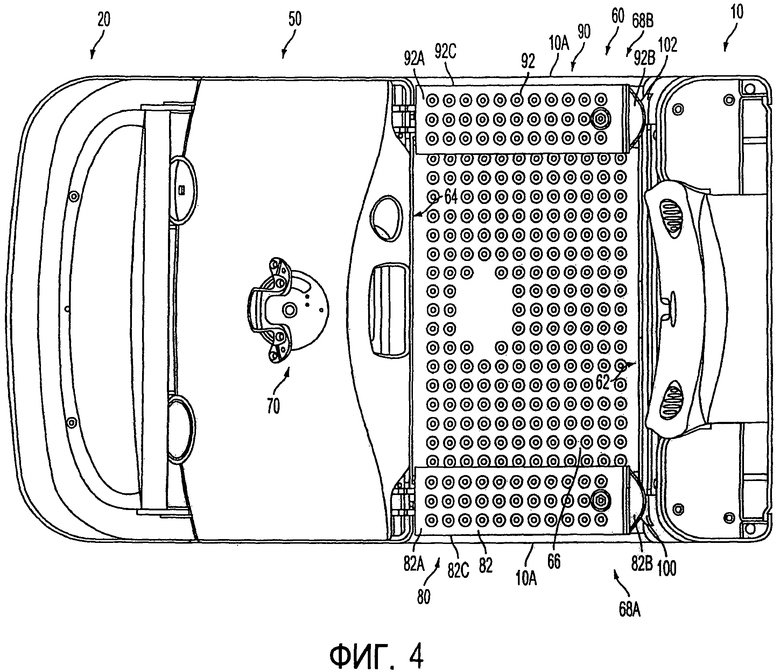
На фиг.4 показан вид сверху тележки, показанной на фиг, 2 и 3,
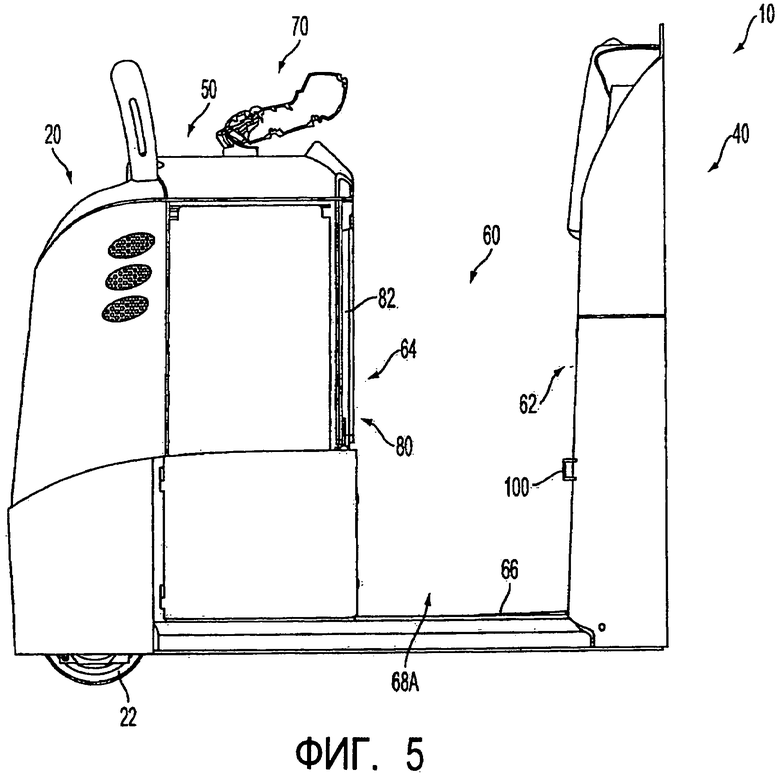
На фиг.5 показан вид сбоку тележки, показанной на фиг.2 и 3, с первой и второй ступеньками в их транспортных положениях.
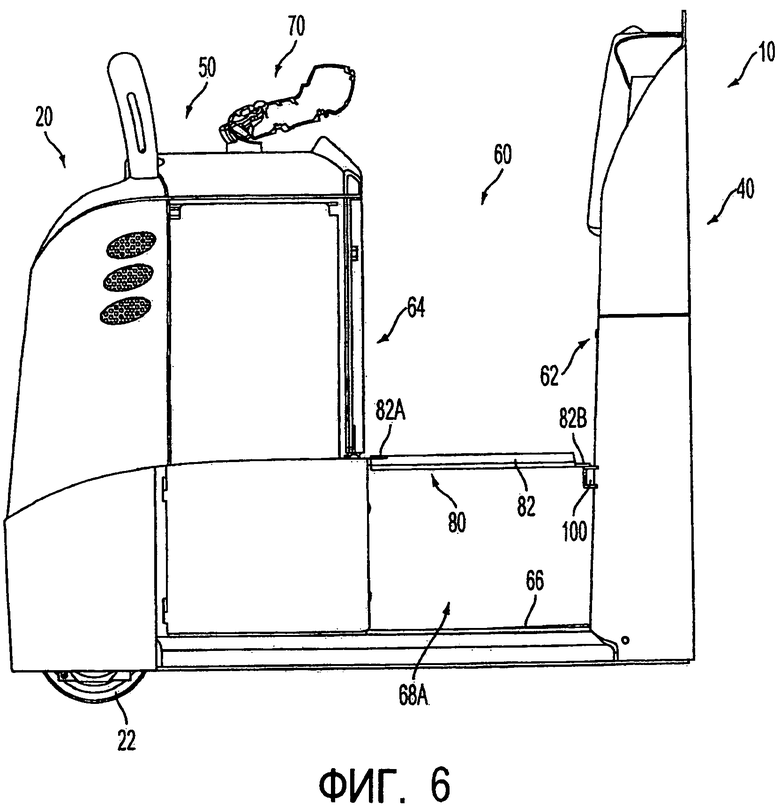
На фиг.6 показан вид сбоку тележки, показанной на фиг.2 и 3, с первой ступенькой в ее развернутом положении.
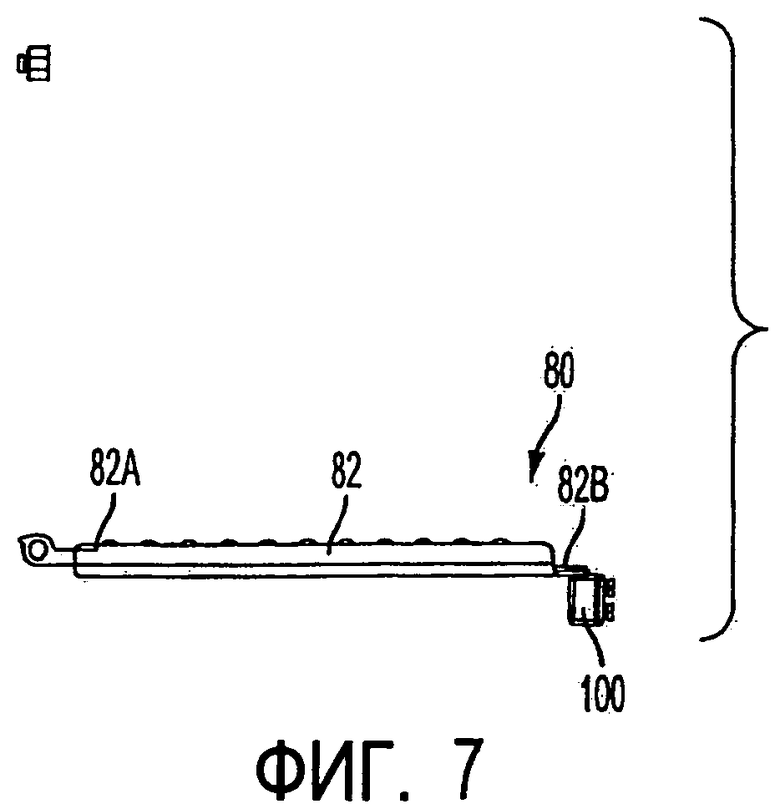
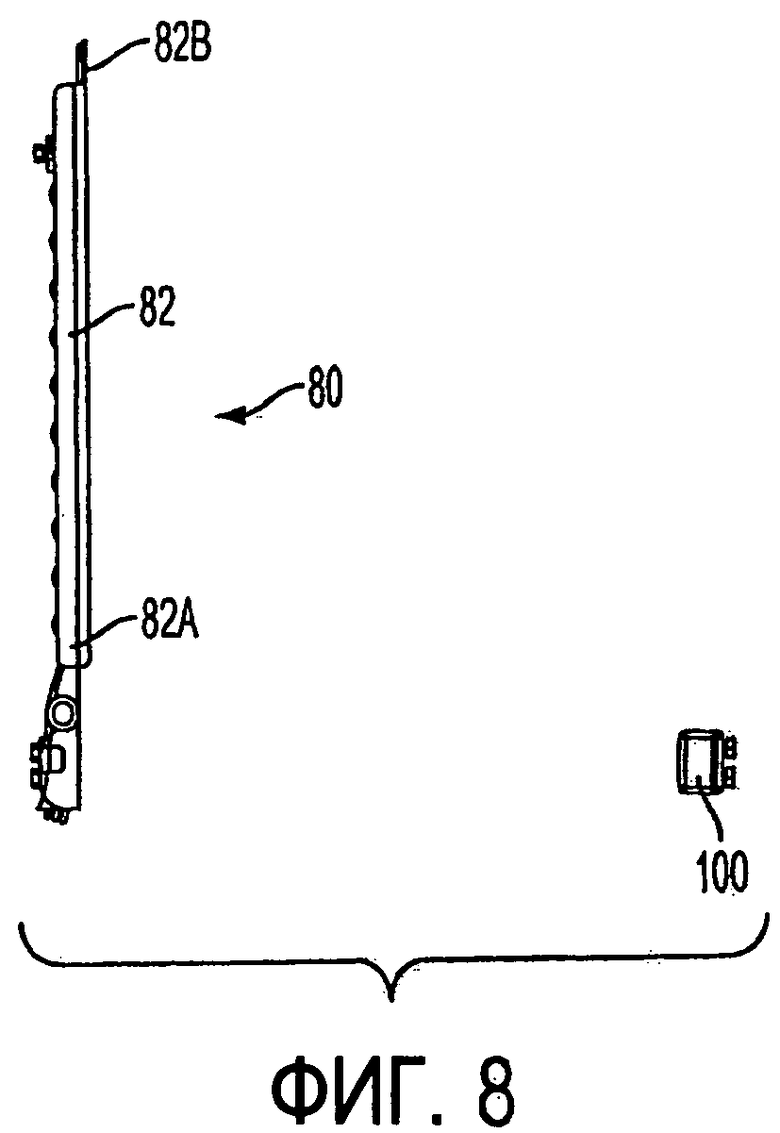
На фиг.7 и 8 показан вид сбоку узла первой ступеньки и ее соответствующего упора.
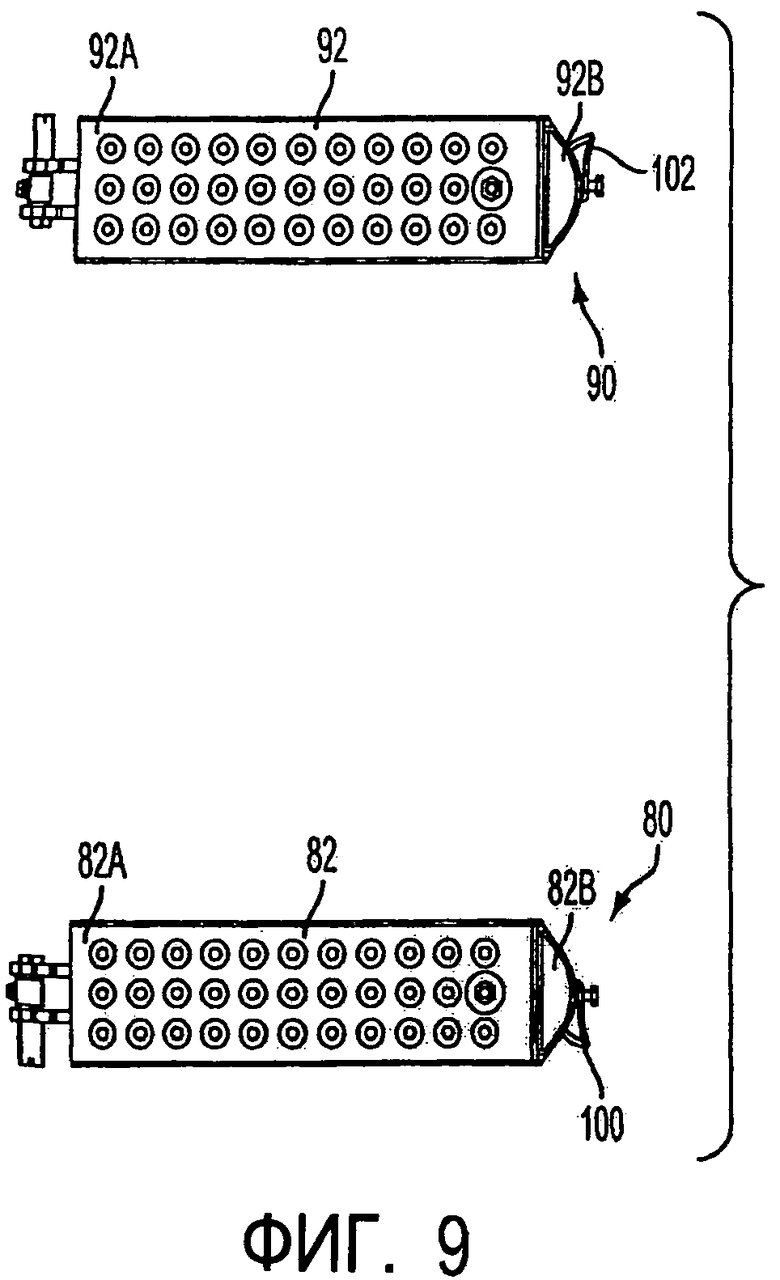
На фиг.9 показан вид сверху узлов первой и второй ступенек и соответствующих упоров, при первой и второй ступеньках в их развернутых положениях.
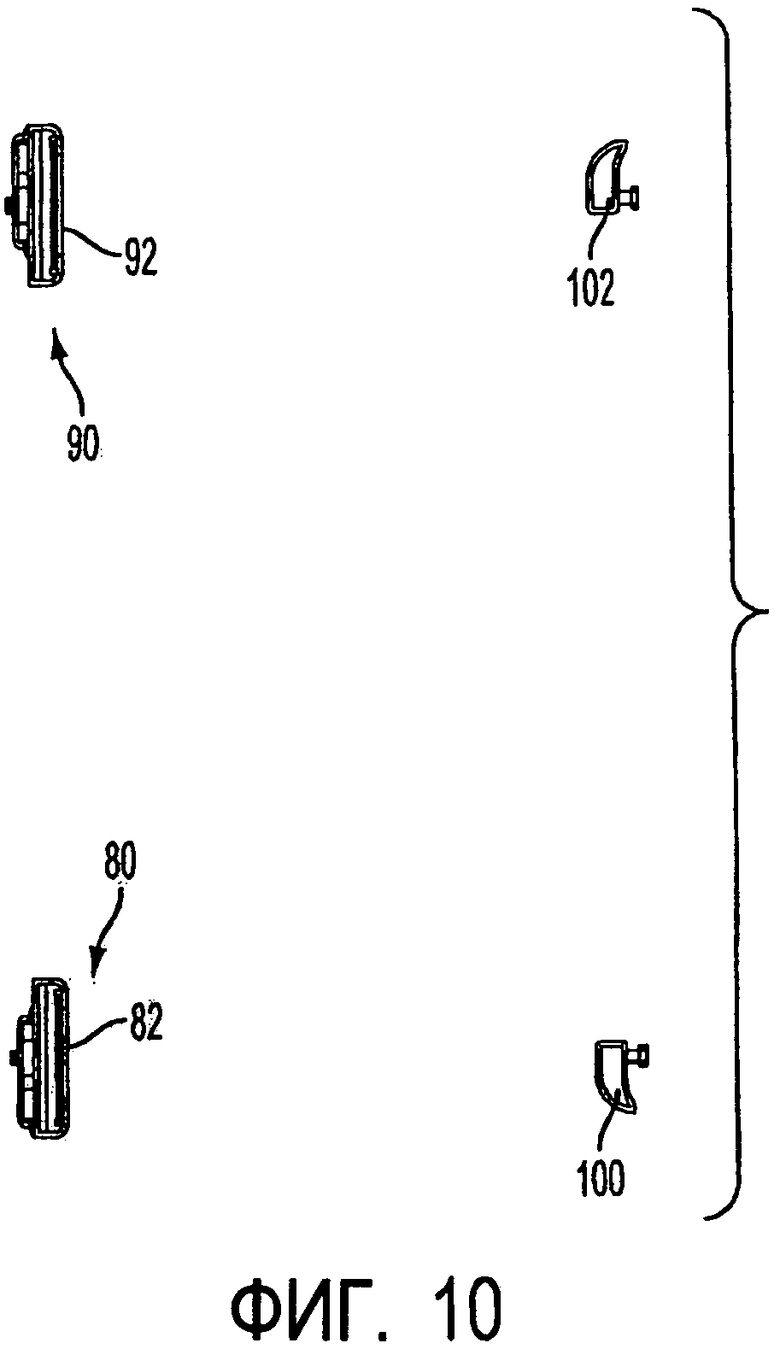
На фиг.10 показан вид сверху узлов первой и второй ступенек и соответствующих упоров, при первой и второй ступеньках в их транспортных положениях.
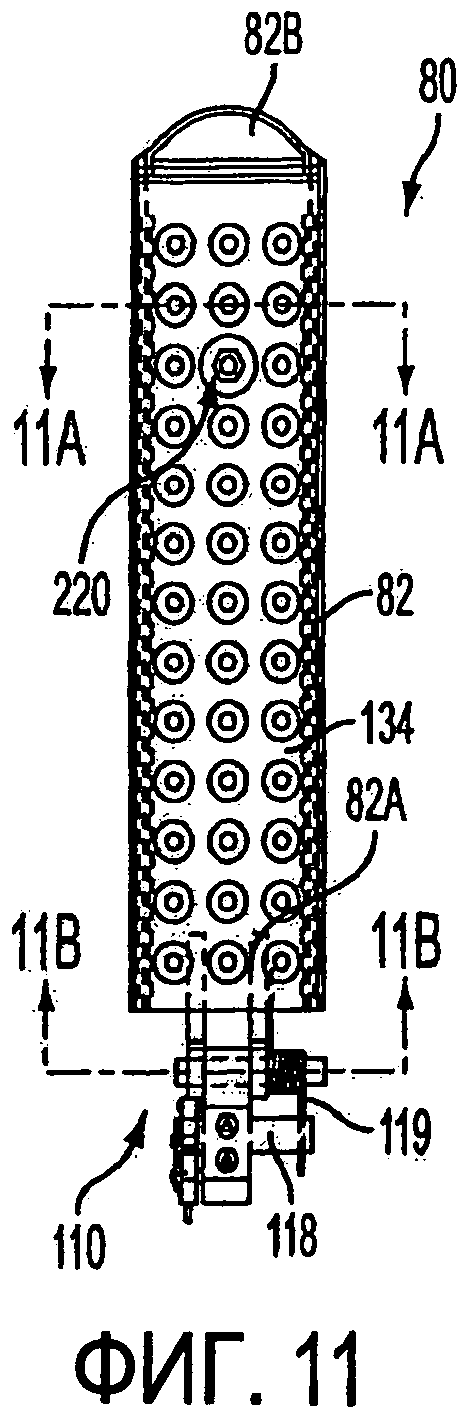
На фиг.11 показан вид спереди узла первой ступеньки.
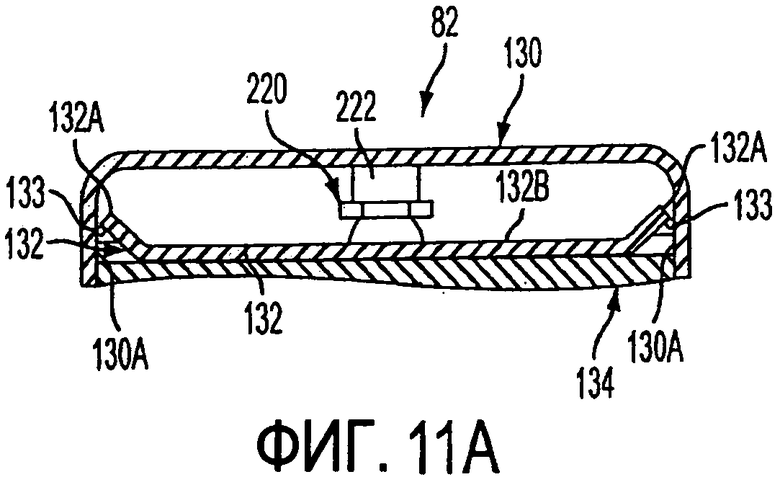
На фиг.11А показан разрез по линии 11А-11А фиг.11.
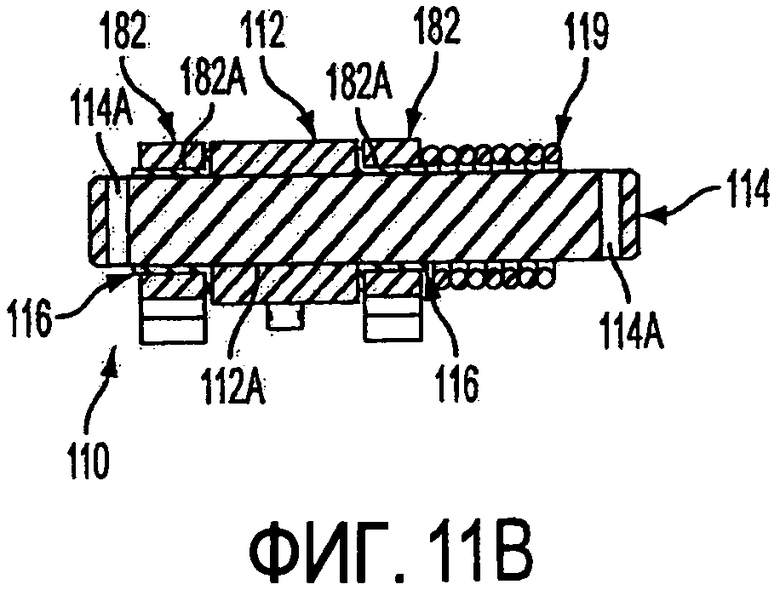
На фиг.11В показан разрез по линии 11В-11В фиг.11.
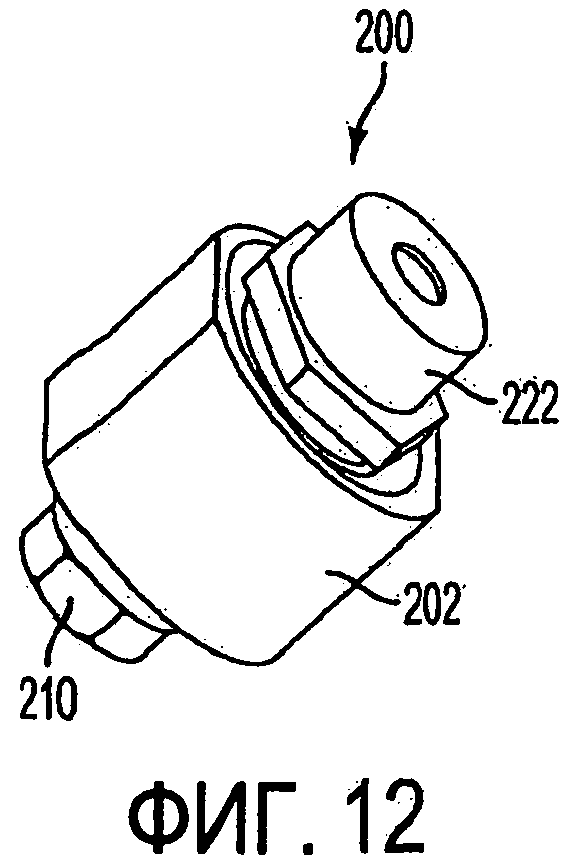
На фиг.12 показан вид в перспективе первого стопорного механизма.
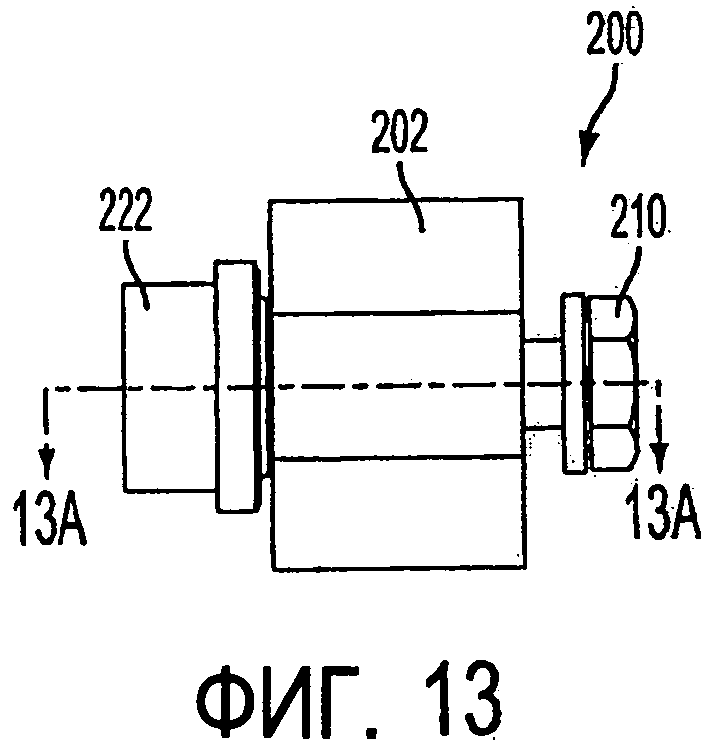
На фиг.13 показан вид сбоку первого стопорного механизма, показанного на фиг.12.
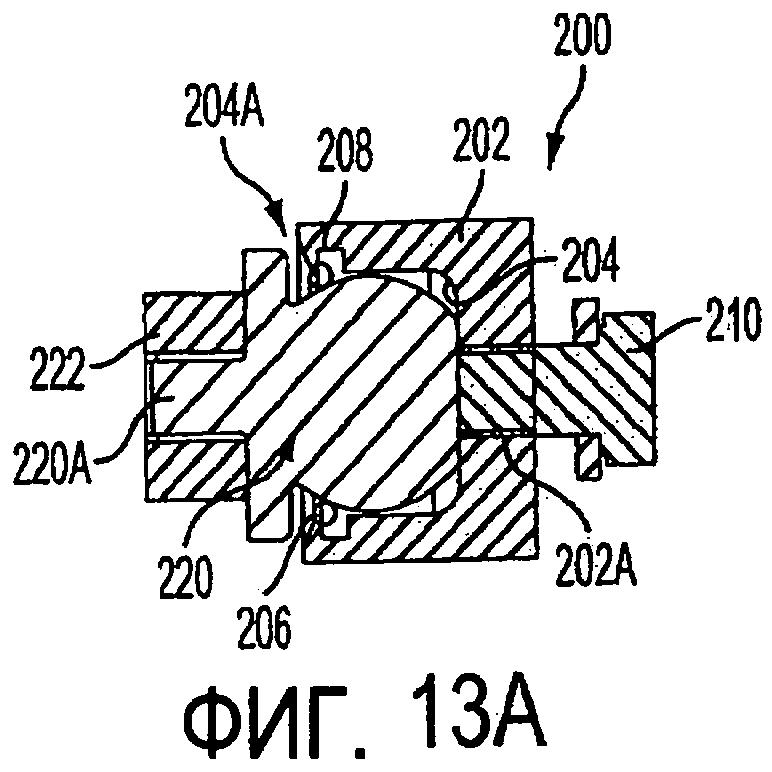
На фиг.13А показан разрез по линии 13А-13А фиг.13.
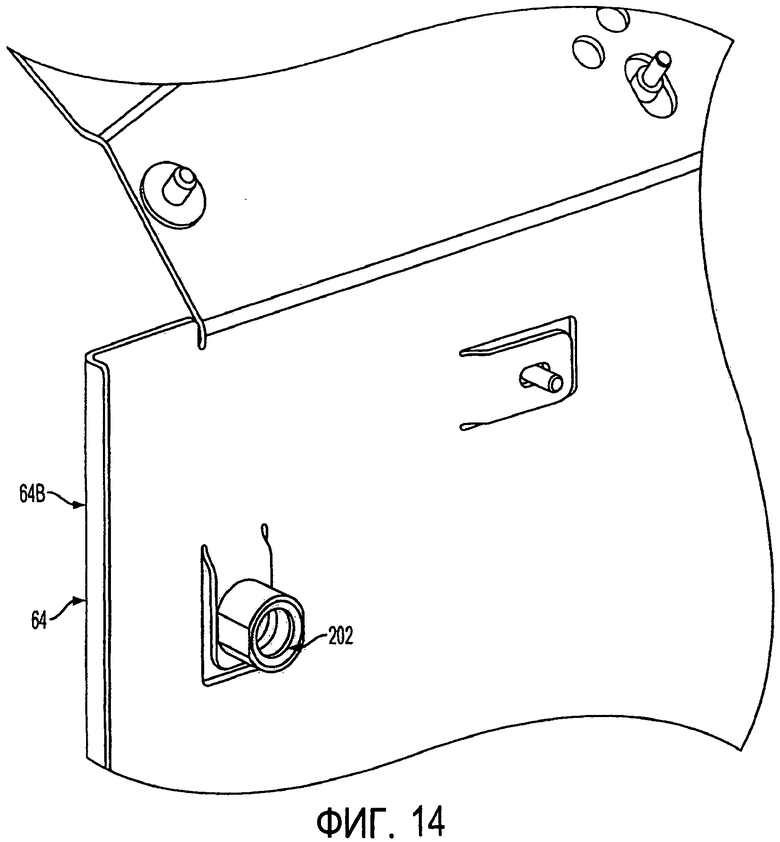
На фиг.14 показан вид в перспективе верхнего участка второй стенки тележки, который содержит охватывающий участок первого стопорного механизма.
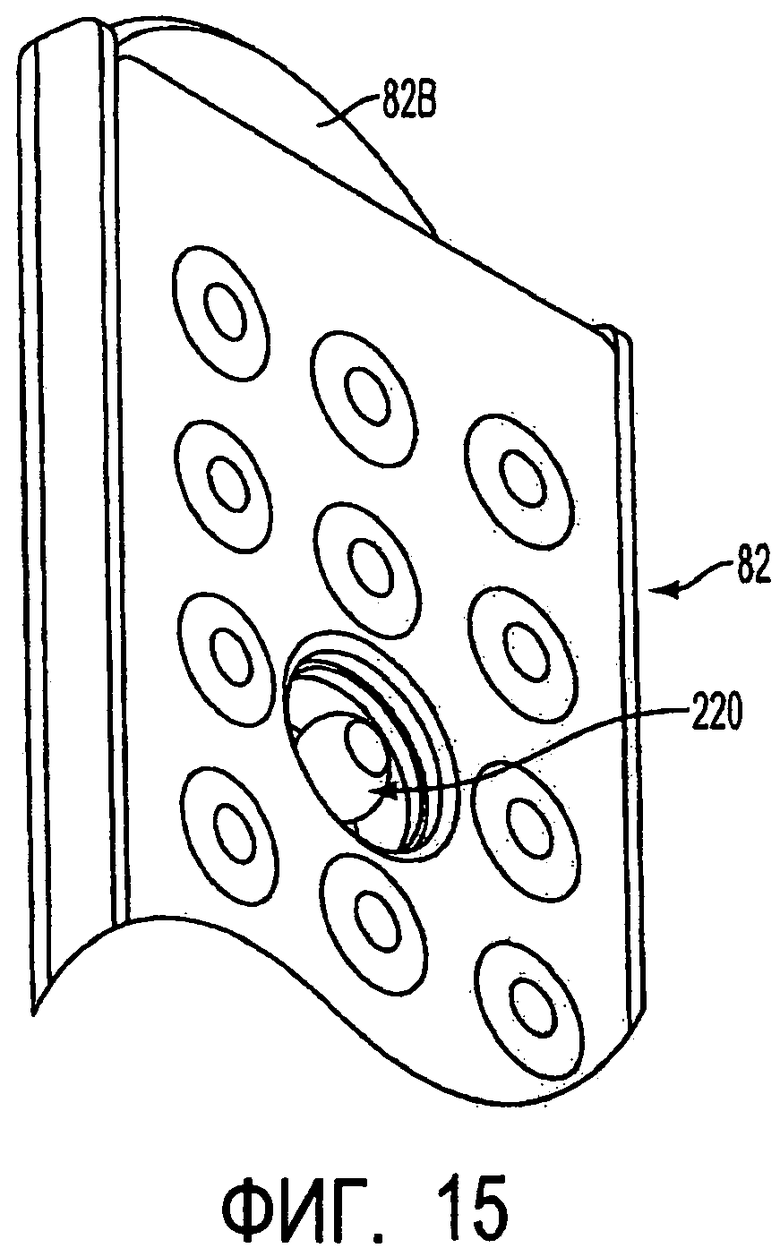
На фиг.15 показан вид в перспективе участка первой ступеньки, который содержит охватываемый участок первого стопорного механизма.
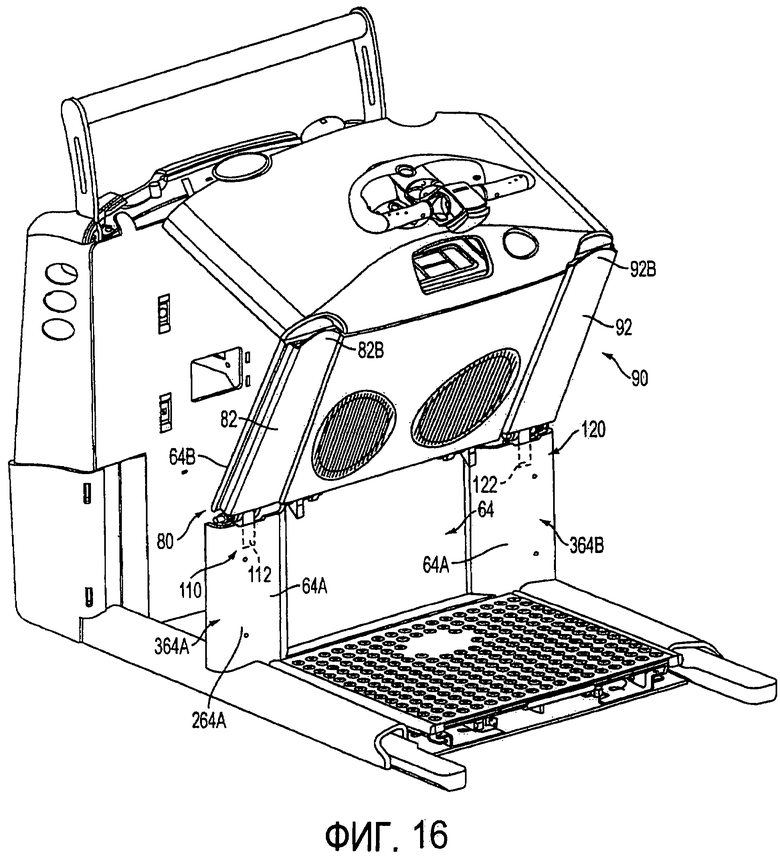
На фиг.16 показан вид в перспективе второй стенки тележки, где можно видеть верхний и базовый участки второй стенки, причем верхний участок повернут относительно базового участка.
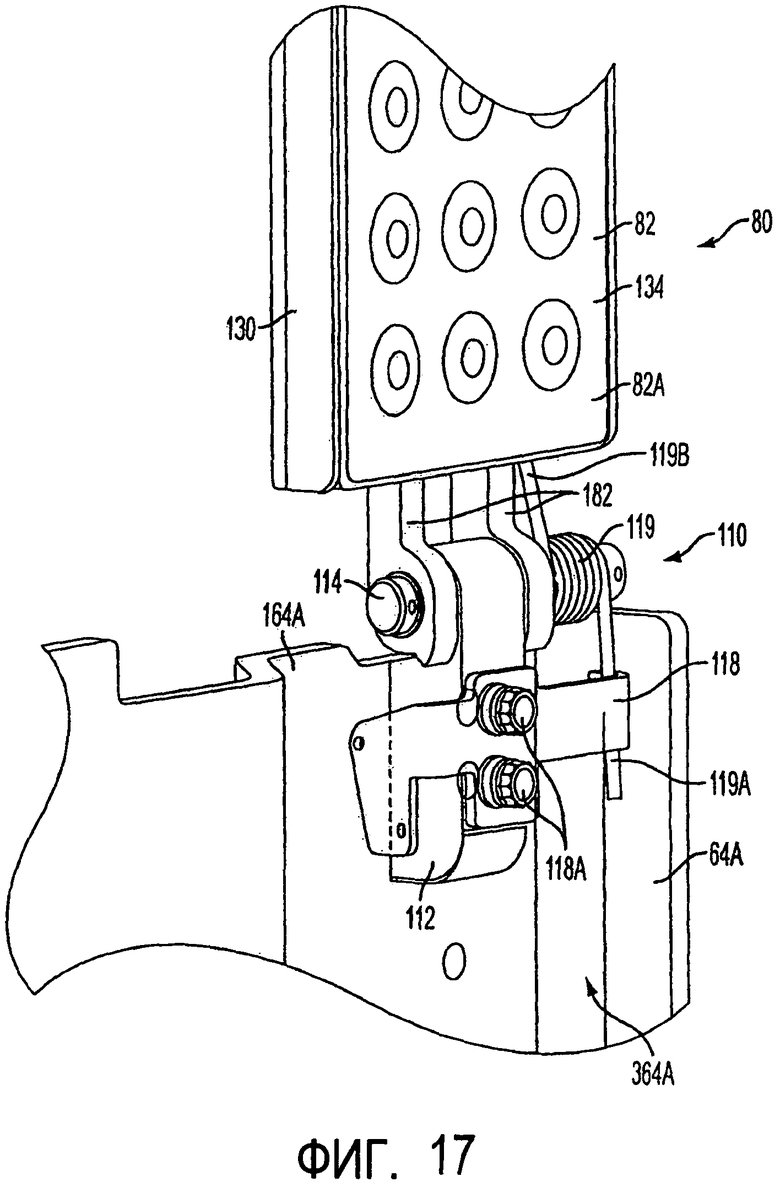
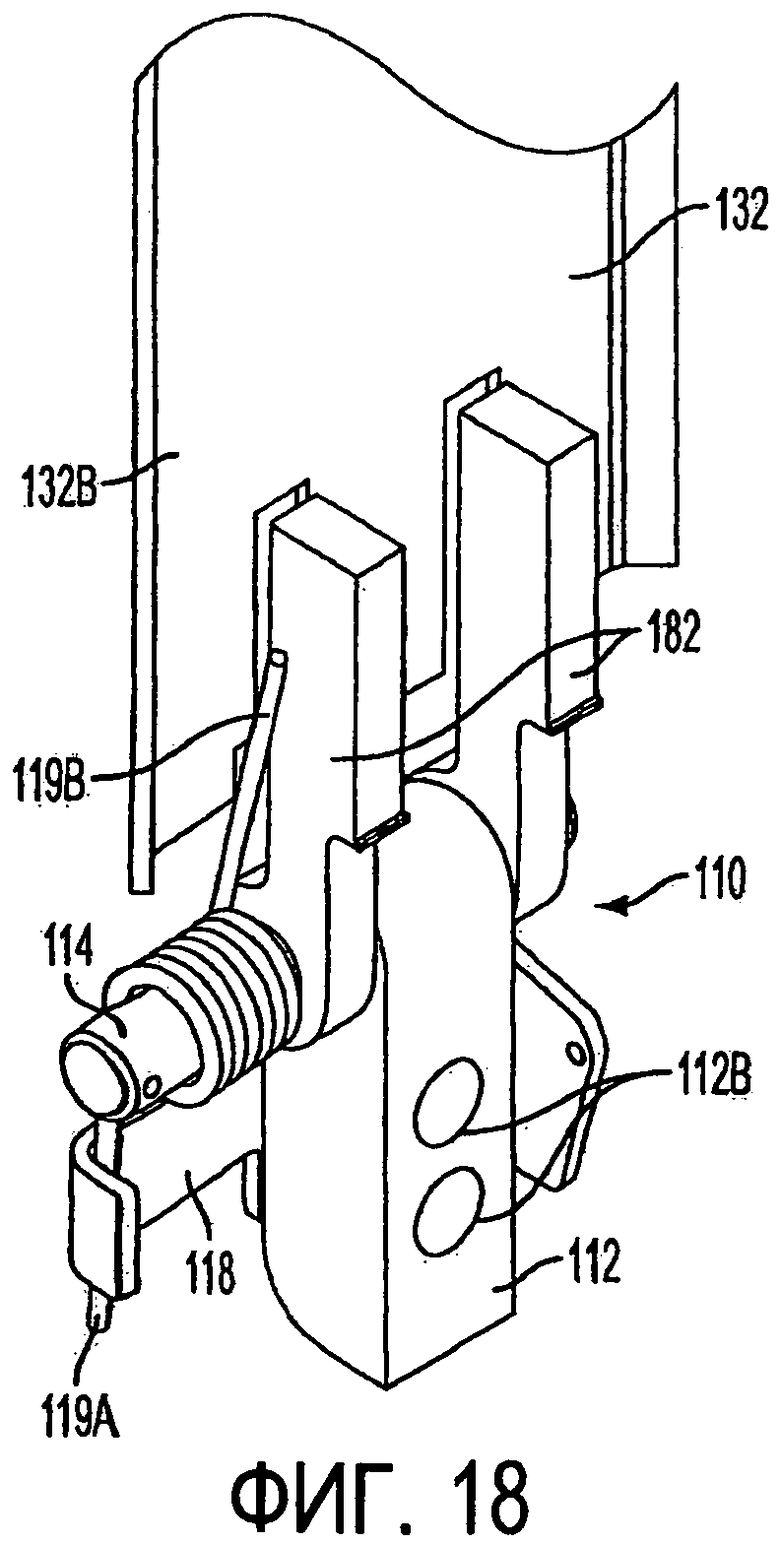
На фиг.17 и 18 показан вид в перспективе первого шарнирного механизма узла первой ступеньки.
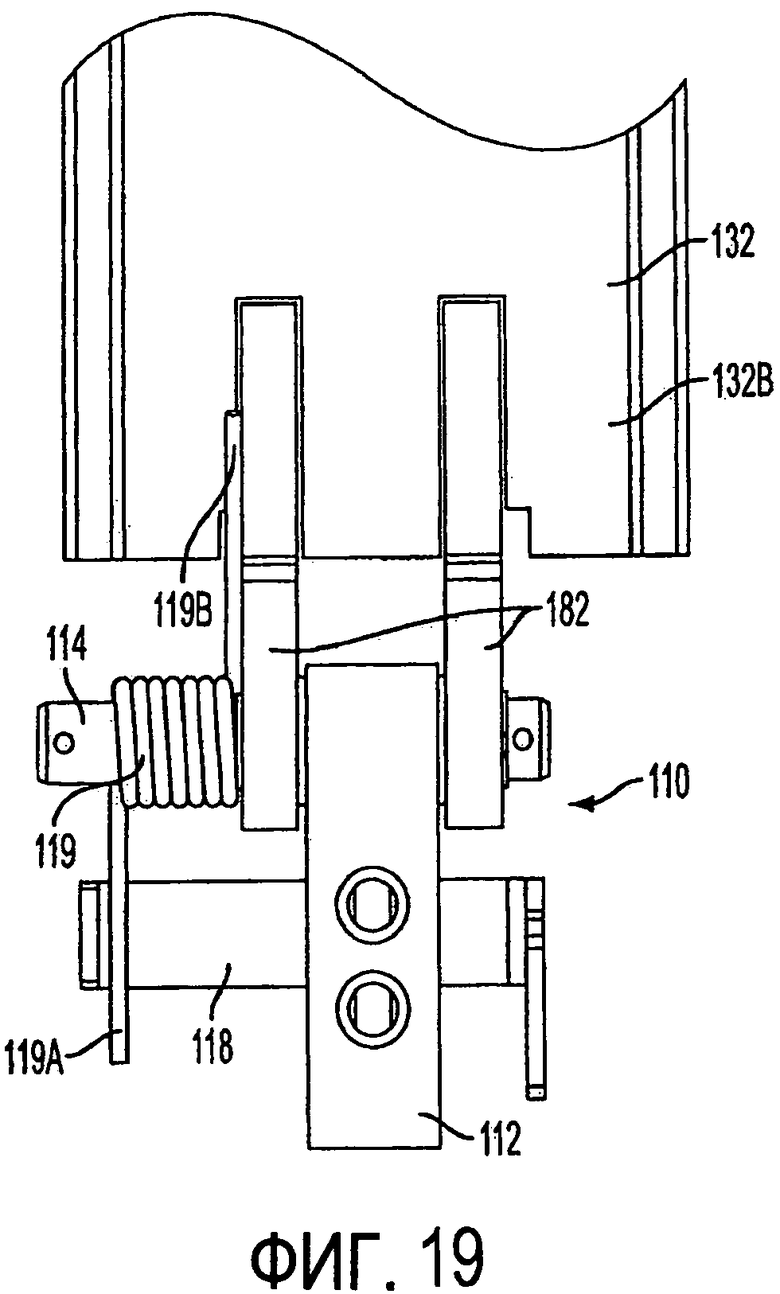
На фиг.19 показан вид сзади первого шарнирного механизма, показанного на фиг.17 и 18.
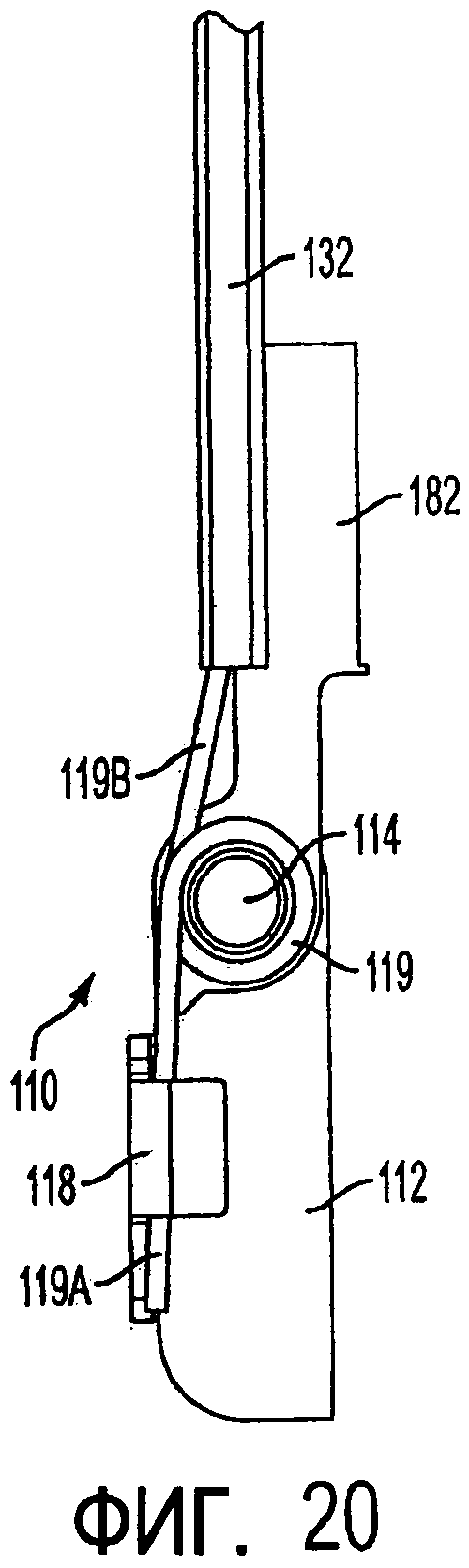
На фиг.20 показан вид сбоку первого шарнирного механизма, показанного на фиг.17 и 18.
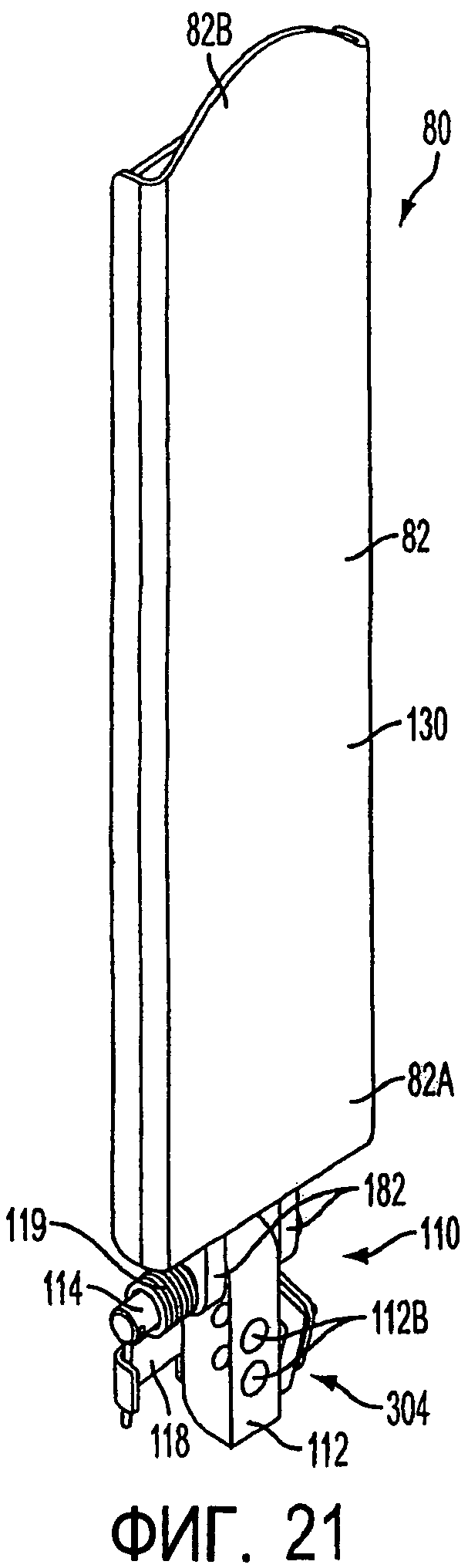
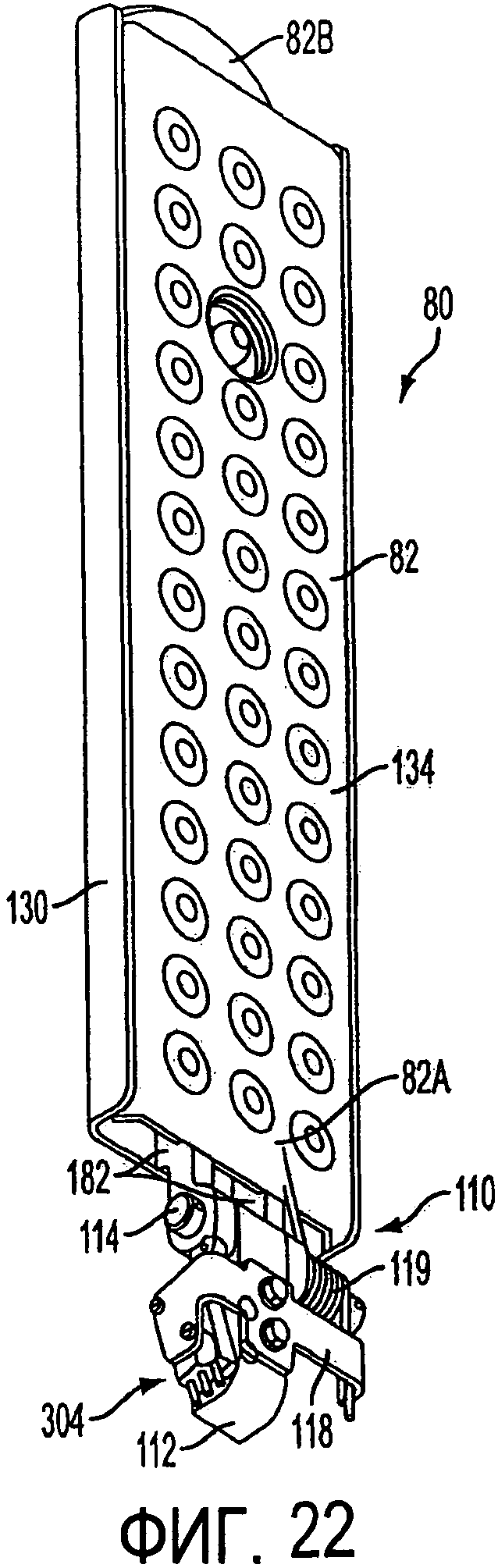
На фиг.21 и 22 показан вид в перспективе узла первой ступеньки и первого микропереключателя.
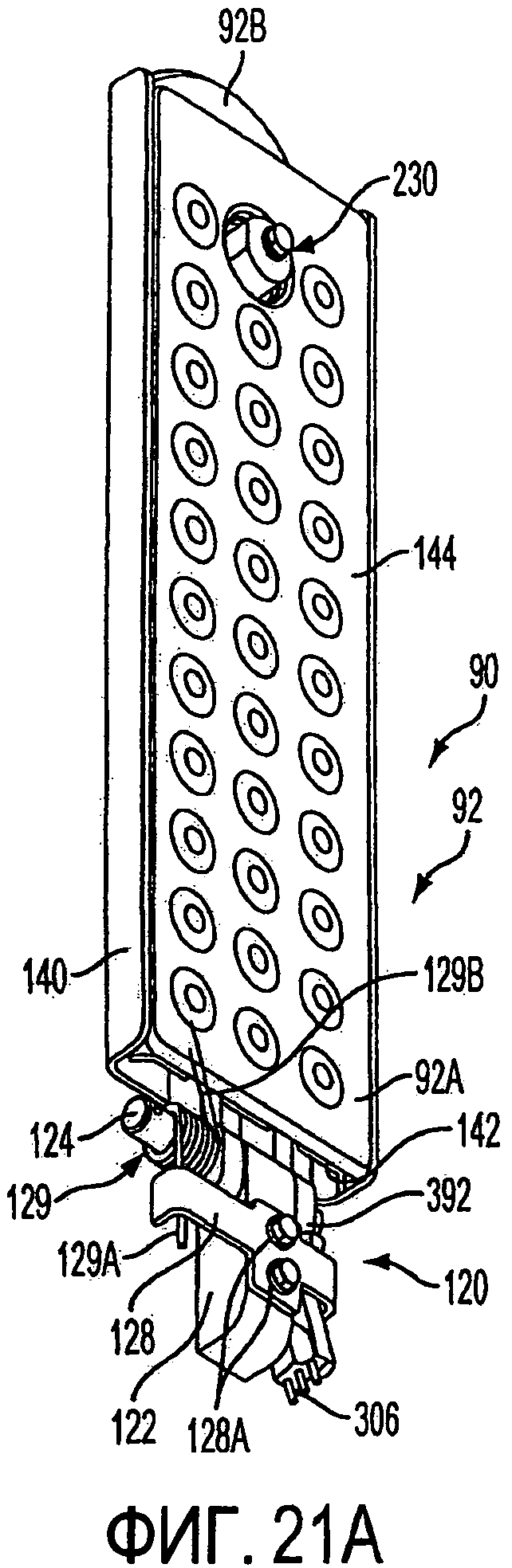
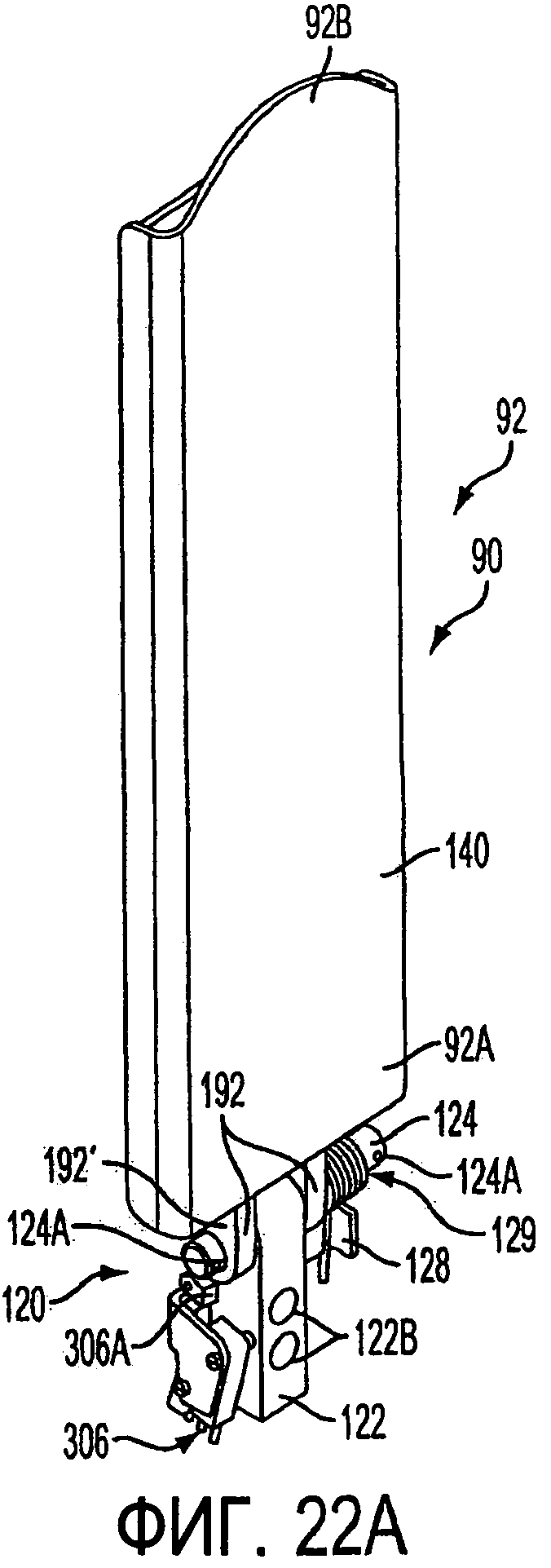
На фиг.21А и 22А показан вид в перспективе узла второй ступеньки и второго микропереключателя.
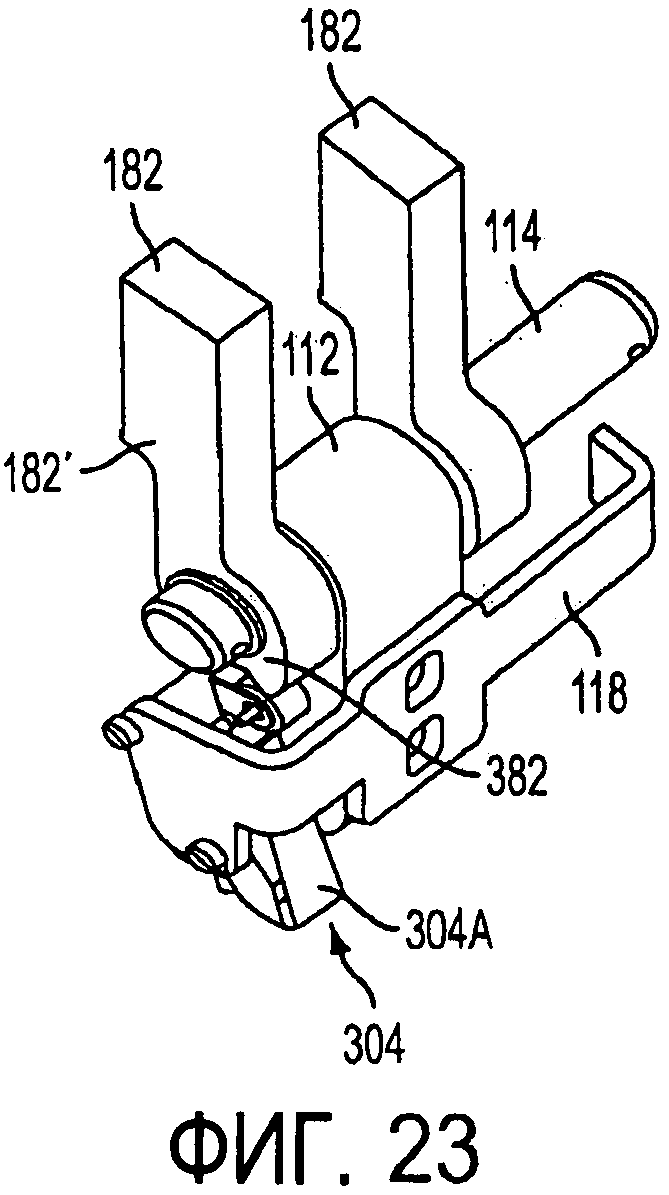
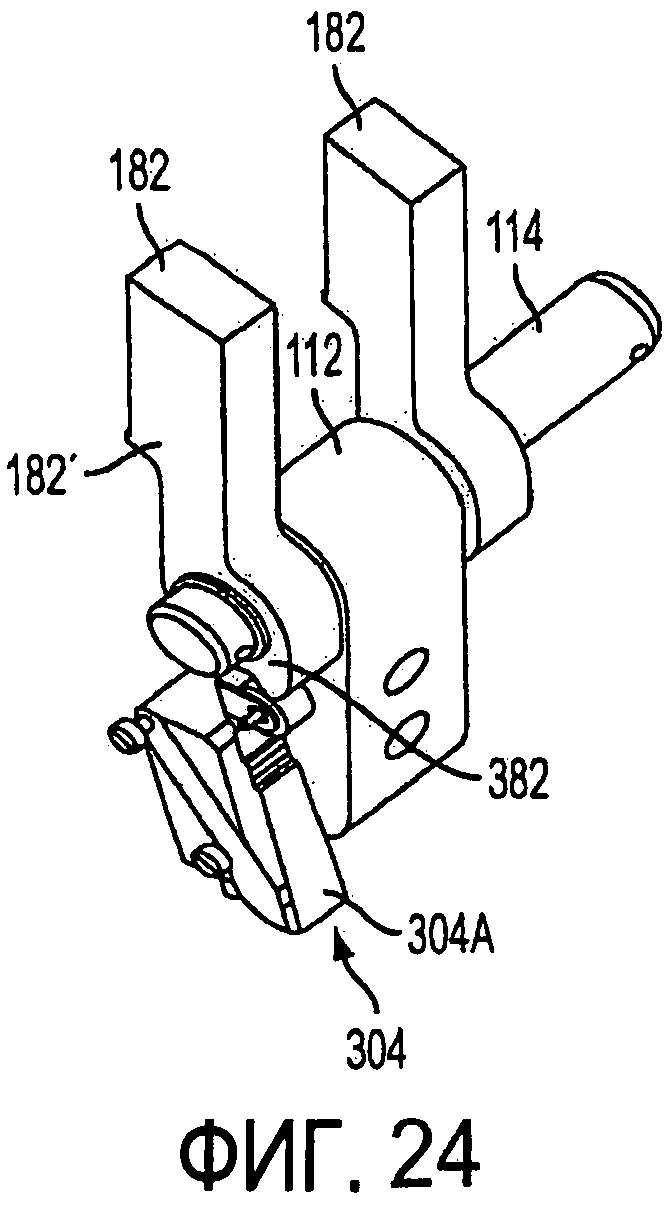
На фиг.23 и 24 показан вид в перспективе поверхности кулачка первого рычага и первого микропереключателя.
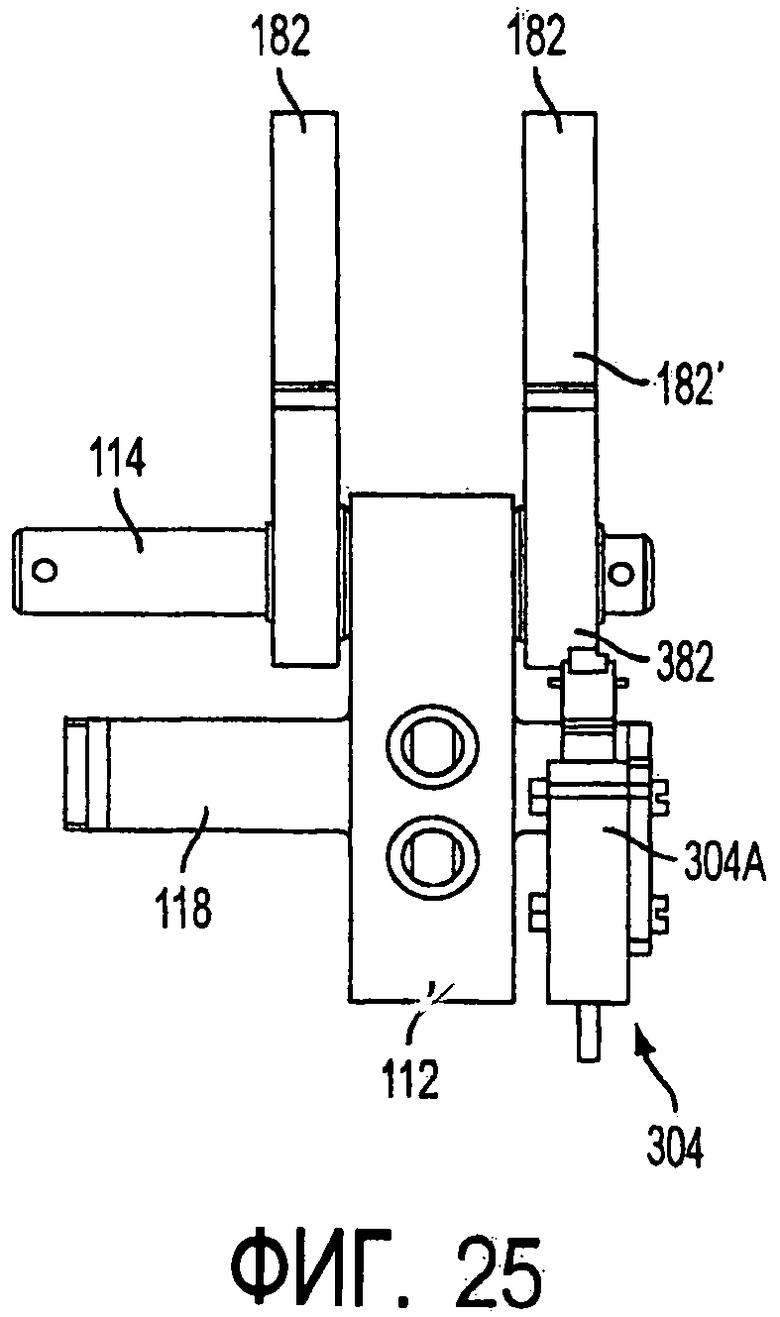
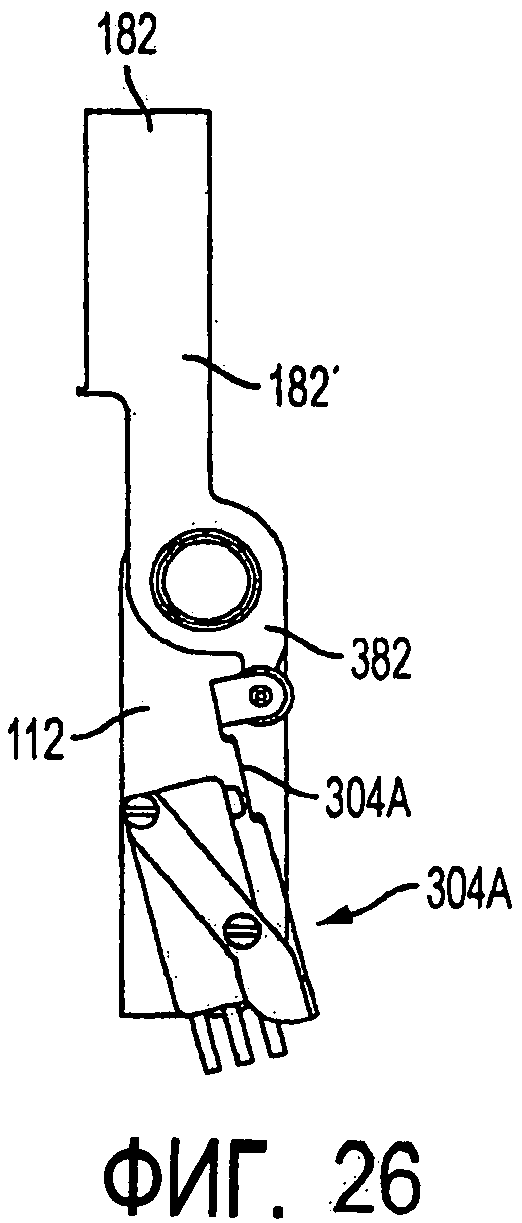
На фиг.25 и 26 показаны соответственно вид спереди и вид сбоку поверхности кулачка и первого микропереключателя, показанных на фиг.23 и 24.
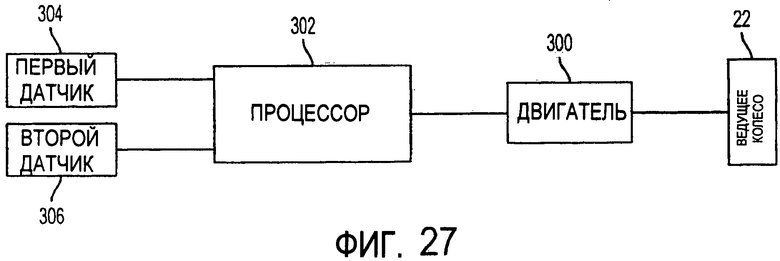
На фиг.27 показана блок-схема ведущего колеса тележки, узла тягового двигателя/ тормоза, процессора и первого и второго микропереключателей, смонтированных в соответствии с первым вариантом настоящего изобретения.
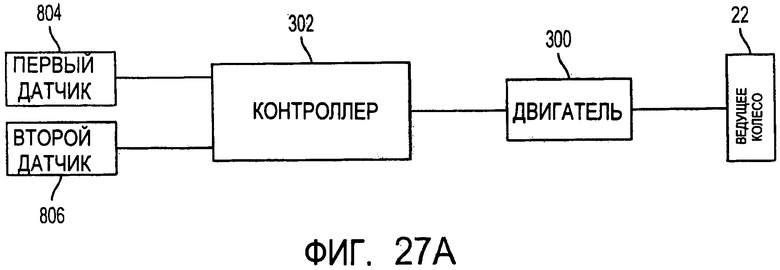
На фиг.27А показана блок-схема ведущего колеса тележки, узла тягового двигателя/ тормоза, процессора и первого и второго датчиков приближения, смонтированных в соответствии со вторым вариантом настоящего изобретения.
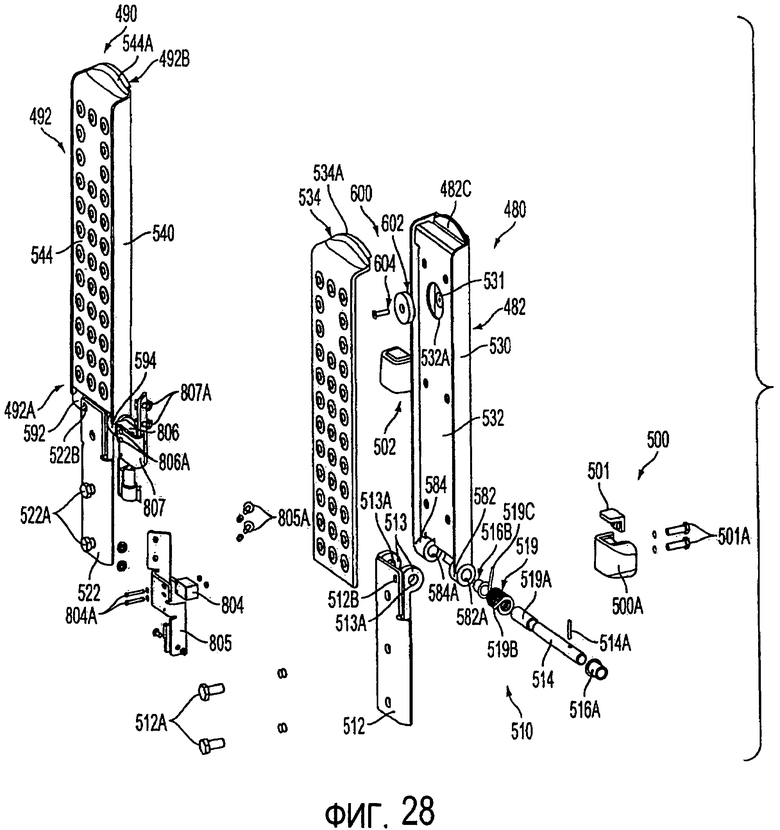
На фиг.28 показан вид в перспективе узлов первой и второй ступенек, сконструированных в соответствии со вторым вариантом настоящего изобретения.
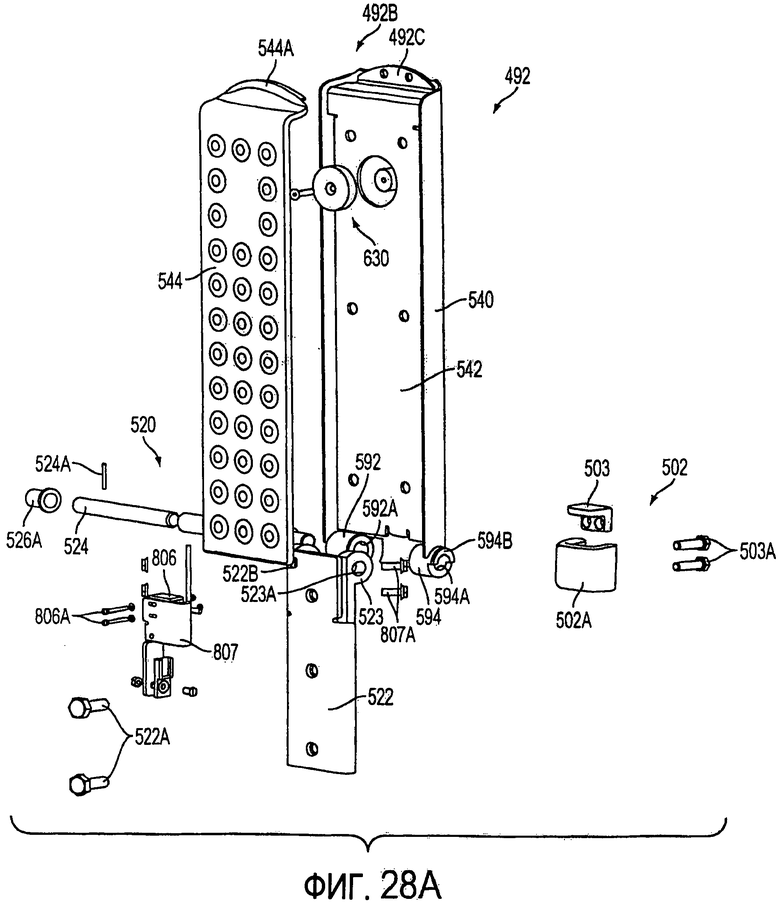
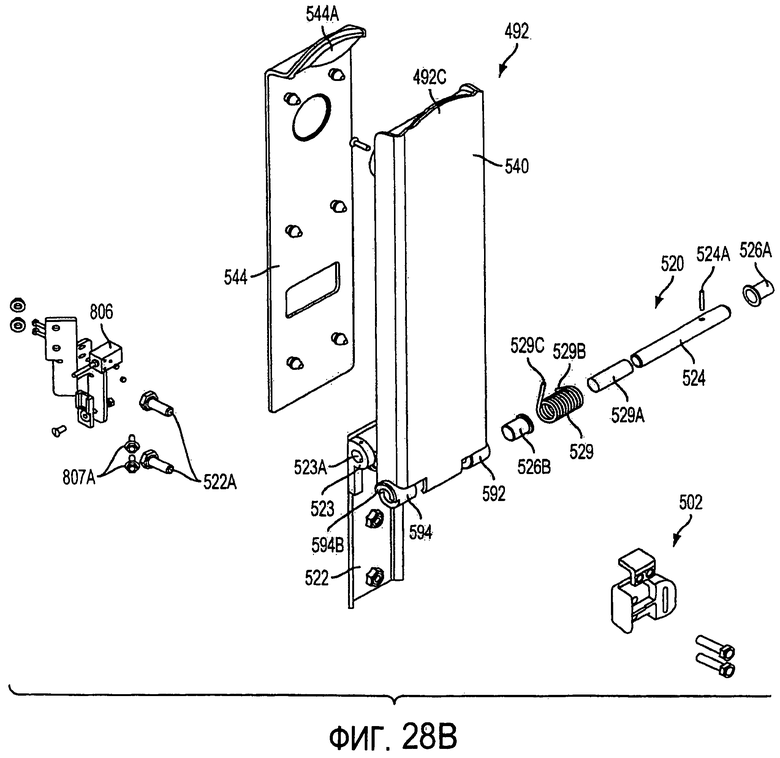
На фиг.28А и 28В показаны перспективные изображения с пространственным разделением деталей узла второй ступеньки, показанного на фиг.28.
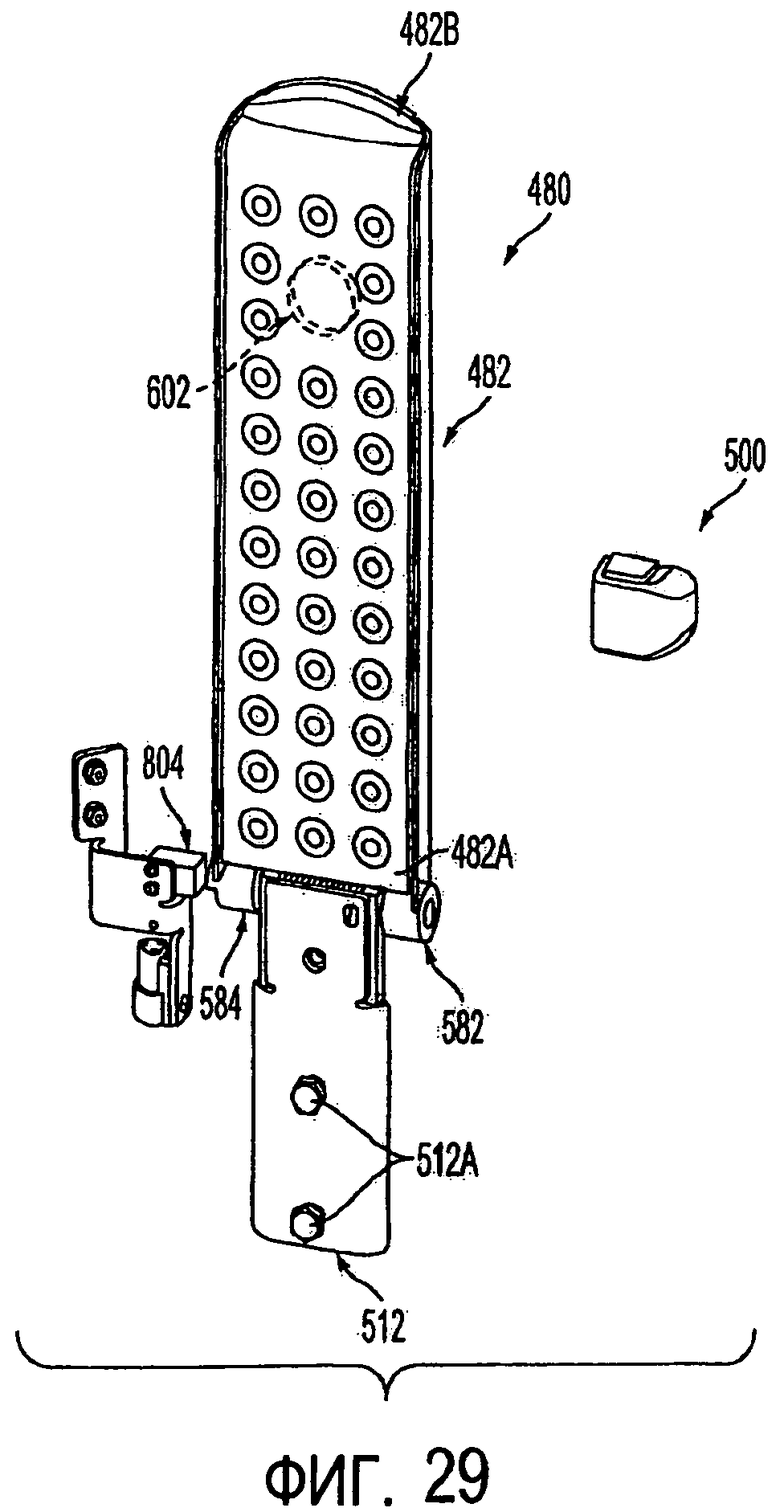
На фиг.29 и 30 показан вид в перспективе узла первой ступеньки, показанного на фиг.28.
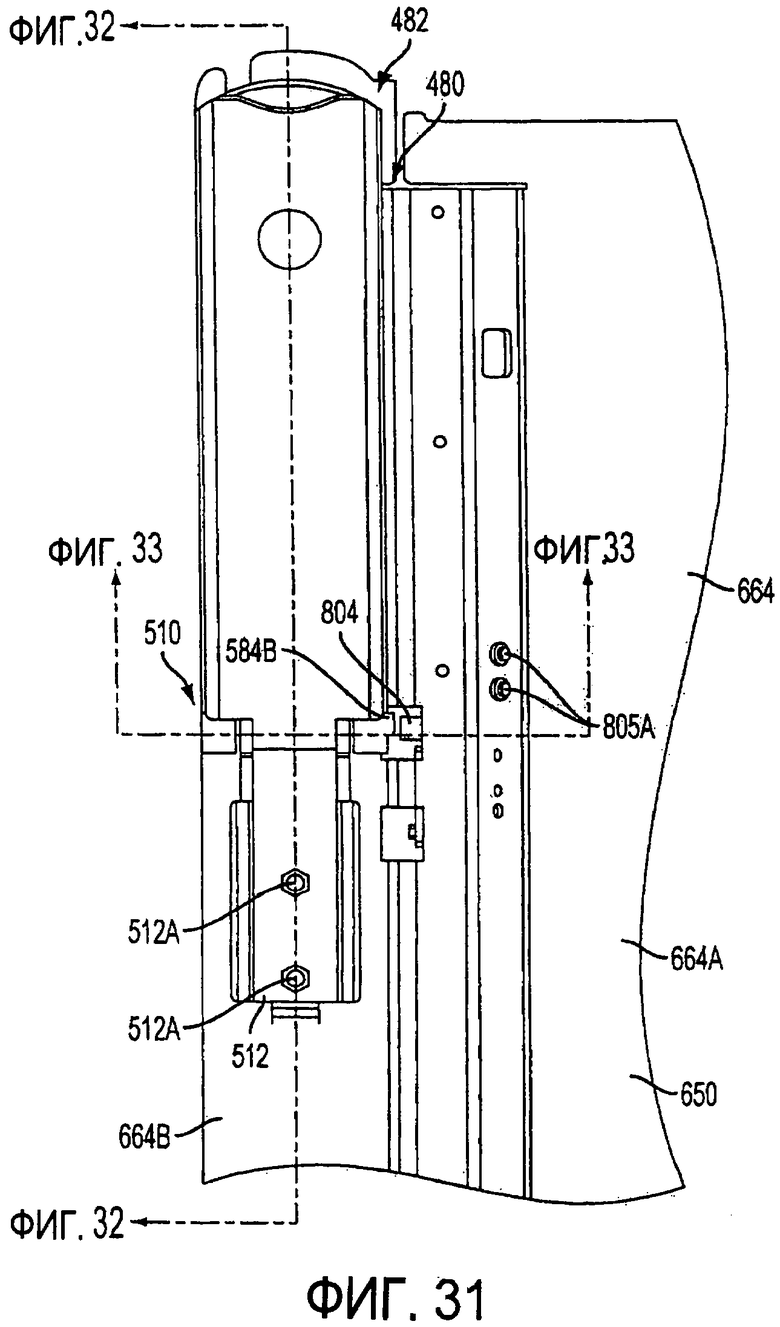
На фиг.31 показан узел первой ступеньки, соединенный со второй стенкой тележки для погрузки-разгрузки материалов.
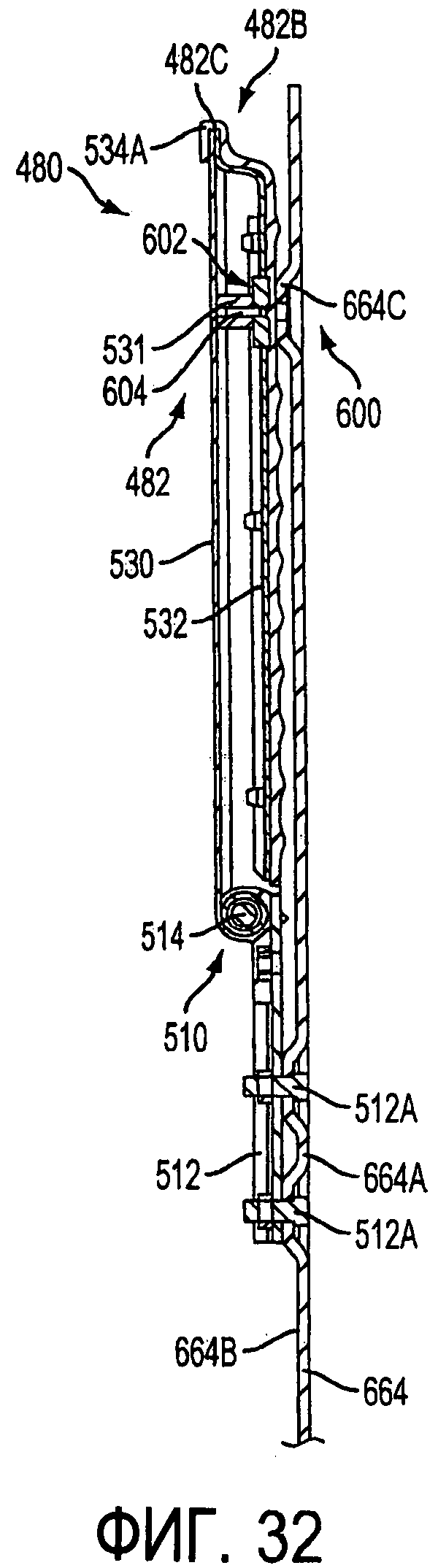
На фиг.32 показан разрез по линии 32-32 фиг.31.
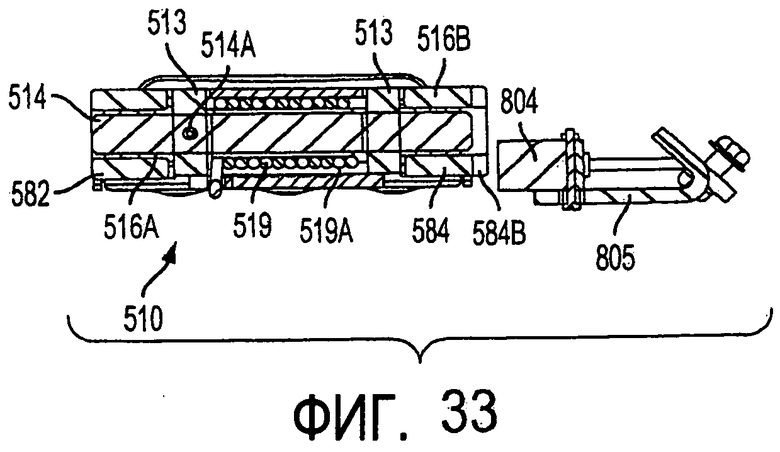
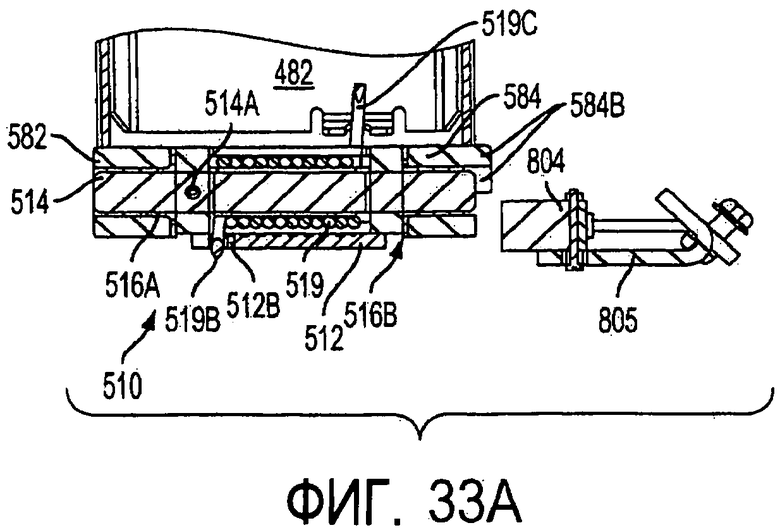
На фиг.33 показан разрез по линии 33-33 фиг.31, с первой ступенькой в ее транспортном положении и без второй стенки.
На фиг.33А показан вид, аналогичный фиг.33, но с первой ступенькой в ее развернутом положении.
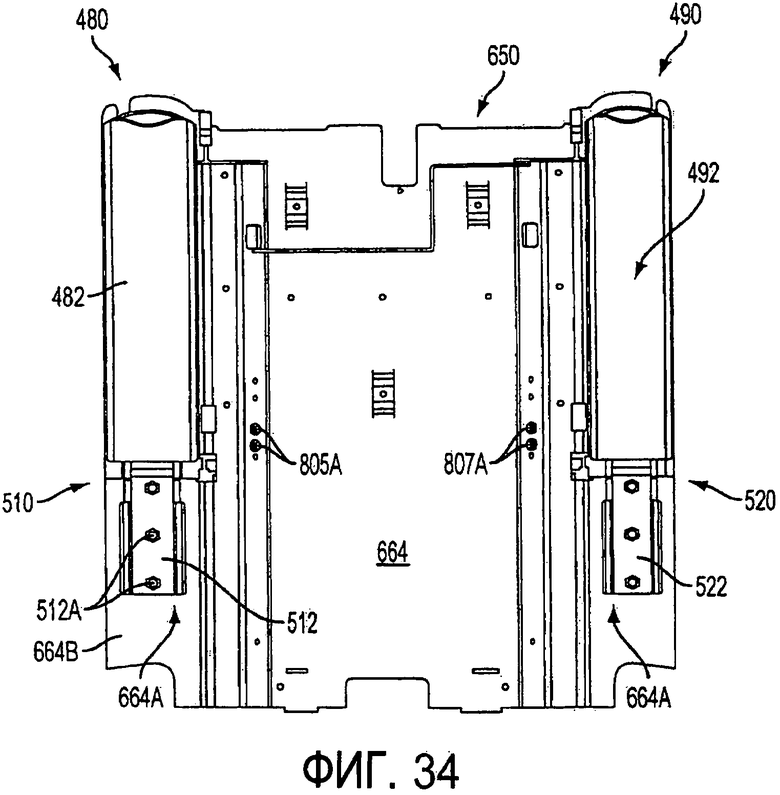
На фиг.34 показаны узлы первой и второй ступенек, показанные на фиг.28, соединенные со второй стенкой.
Подробное описание изобретения
Обратимся теперь к рассмотрению фиг.1, на которой показана тележка 10 для погрузки-разгрузки материалов, которая содержит захват, расположенный на низком уровне. Тележка 10 содержит раму 12, содержащую силовой агрегат 20, содержащий узел 300 тягового двигателя/ тормоза, соединенный с ведущим колесом 22, (см. фиг.5, 6 и 27), для приведения в движение и торможения ведущего колеса 22. Ведущее колесо 22 расположено под силовым агрегатом 20. Не приводное самоориентирующееся колесо (не показано) также расположено под силовым агрегатом 20. Двигатель рулевого управления (не показан) предусмотрен в силовом агрегате 20 для поворота ведущего колеса 22, то есть для того, чтобы управлять направлением движения тележки 10. Гидравлический насос/ двигатель (не показан) также расположен в силовом агрегате 20 и служит для подачи рабочей жидкости под давлением в блок поршня/ цилиндра (не показан), для подъема и опускания первого и второго вилочных захватов 30 и 32 относительно опорной стенки 40. Опорная стенка 40 содержит часть рамы 12 тележки. Вилочные захваты 30 и 32 показаны только на фиг.1. Узел 30А колеса нагрузки соединен с каждым вилочным захватом 30, 32. Рама 12 дополнительно содержит батарейный отсек 50, содержащий батарею 52. Батарейный отсек 50 расположен рядом с силовым агрегатом 20. Батарея 52 снабжает энергией узел тягового двигателя/ тормоза, двигатель рулевого управления и гидравлический насос/ двигатель. Рама 12 также содержит сквозной отсек 60 оператора, который расположен между батарейным отсеком 50 и опорной стенкой 40. Оператор, при нахождении в отсеке 60 оператора, может управлять скоростью, торможением, направлением движения тележки 10 и высотой вилочных захватов 30 при помощи рукоятки 70 управления.
Сквозной отсек 60 оператора может иметь противоположные первую и вторую стенки 62 и 64 и пол 66, см. фиг.1-6. Сквозной отсек 60 оператора дополнительно содержит первый и второй входы 68А и 68В, через которые оператор может входить в отсек 60 оператора и выходить из него, см. фиг.2-6.
Тележка 10 дополнительно содержит, в соответствии с первым вариантом настоящего изобретения, узлы 80 и 90 первой и второй ступенек и первый и второй упоры 100 и 102 (упоры на фиг.1 не показаны), см. фиг.2-10. Узел 80 первой ступеньки содержит первую ступеньку 82, выполненную с возможностью поворота между развернутым положением, в котором ступенька 82 расположена поперек первого входа 68А, см. фиг.2-4 и 6, и транспортным положением, в котором первая ступенька 82 расположена так, чтобы не блокировать первый вход 68А в отсек 60 оператора, см. фиг.5. При нахождении в транспортном положении, второй конец 82В ступеньки 82, противоположный первому концу 82А ступеньки 82, входит в зацепление с упором 100 или упирается в него. Упор 100 соединен болтами или иным образом с первой стенкой 62, в таком местоположении на первой стенке 62, что ступенька 82 расположена в целом в горизонтальной плоскости. Узел 90 второй ступеньки содержит вторую ступеньку 92, выполненную с возможностью поворота между развернутым положением, в котором ступенька 92 расположена поперек второго входа 68В, см. фиг.2-4, и транспортным положением, в котором вторая ступенька 92 расположен так, чтобы не блокировать второй вход 68В в отсек 60 оператора, см. фиг.5. При нахождении в развернутом положении, второй конец 92В ступеньки 92, противоположный первому концу 92А ступеньки 92, входит в зацепление с упором 102 или упирается в него. Упор 102 соединен болтами или иным образом с первой стенкой 62, в таком местоположении на первой стенке 62, что ступенька 92 расположена в целом в горизонтальной плоскости. Когда первая и вторая ступеньки 82 и 92 расположены в их нижних или развернутых положениях, они могут быть расположены над полом 66 на расстоянии ориентировочно от 250 мм до 450 мм. Как это лучше всего показано на фиг.4, внешние кромки 82С и 92С или первая и вторая ступеньки 82 и 92 расположены в непосредственной близости от внешней периферийной кромки 10А тележки 10. Когда первая ступенька 82 находится в ее развернутом положении, оператор может встать на ступеньку 82, чтобы получить доступ к верхней ячейке стеллажа. Аналогично, когда вторая ступенька 92 находится в ее развернутом положении, оператор может встать на ступеньку 92, чтобы получать доступ к верхней ячейке стеллажа.
Узел 80 первой ступеньки дополнительно содержит первый шарнирный механизм 110 для соединения ступеньки 82 с базовым участком 64А второй стенки 64, см. фиг.16 и 17. Узел 90 второй ступеньки дополнительно содержит второй шарнирный механизм 120 для соединения ступеньки 92 с базовым участком 64А второй стенки 64, см. фиг.16. Вторая стенка 64 образует одну из стенок батарейного отсека 50. В показанном варианте, шарнирные механизмы 110 и 120 не соединены с верхним участка 64В второй стенки. Также предусмотрено, что вторая стенка 64 может иметь только один (общий) участок. Таким образом, стенка 64 не будет содержать отдельные базовый и верхний участки 64А и 64В, а вместо этого будет содержать только один участок.
Первая ступенька 82 содержит внешний швеллер 130 и внутреннюю пластину 132 ступеньки, соединенные вместе при помощи одного или нескольких сварных швов 133, расположенных вдоль внешних кромок 132А пластины 132 и внутренних кромок 130А внешнего швеллера 130, см. фиг.11А. Полимерный лист или мат (коврик) 134, изготовленный, например, из синтетического каучука, расположен поверх внутренней пластины 132 ступеньки, см. фиг.11, 11А, 17 и 22. Мат 134 соединен с внутренней пластиной 132 при помощи клея, болтов или других аналогичных средств крепления. Пара соединительных кронштейнов 182, каждый из которых имеет отверстие 182А, см. фиг.11В, соединены сваркой с внешним швеллером 130, см. фиг.22. Внешний швеллер 130 не показан на фиг.18, 19 и 20.
Первый шарнирный механизм 110 содержит основной блок 112 крепления, приваренный или иным образом соединенный с внутренней поверхностью 164А базового участка 64А второй стенки, поблизости от первой внешней краевой секции 364А базового участка 64А второй стенки, см. фиг.16 и 17. Внутренняя поверхность 164А расположена напротив внешней поверхности 264А, которая обращена к отсеку 60 оператора, см. фиг.16. Поворотный шкворень 114 проходит через отверстия 182А в соединительных кронштейнах 182 ступеньки и через отверстие 112А, предусмотренное в основном блоке 112 крепления, см. фиг.11В. Шплинты (не показаны) могут быть предусмотрены в отверстиях 114А в шкворне 114, чтобы поддерживать шкворень 114 в заданном положении относительно соединительных кронштейнов 182 и основного блока 112. Первая и вторая втулки 116 установлены на шкворне 114 и идут через отверстия 182А в соединительных кронштейнах 182. Кронштейн 118 зацепления с пружиной соединен с основным блоком 112 крепления при помощи пары болтов 118А, которые по резьбе введены в отверстия 112В в основном блоке 112 крепления, см. фиг.11 и 17-22. Торсионная пружина 119 намотана на шкворне 114, см. фиг.11, 11В и 17-22. Пружина 119 не показана на фиг.23-26. Первый конец 119А торсионной пружины 119 входит в зацепление с кронштейном 118, в то время как второй конец 119В торсионной пружины 119 входит в зацепление со ступенькой 82, а более конкретно, с внутренней поверхностью 132В пластины 132 ступеньки, см. фиг.11А и 17-20. Первый шарнирный механизм 110 позволяет первой ступеньке 82 совершать поворот между ее нижним или развернутым положением, когда ступенька 82 расположена поперек первого входа 68А, см. фиг.2-4 и 6, и ее верхним или транспортным положением, когда первая ступенька 82 расположена так, чтобы не блокировать первый вход 68А в отсек 60 оператора, см. фиг.5. Пружина 119 образует смещающий элемент, который помогает оператору перемещать ступеньку 82 из ее нижнего или развернутого положения в ее верхнее или транспортное положение.
Вторая ступенька 92 содержит внешний швеллер 140 и внутреннюю пластину 142 ступеньки, см. фиг.21А и 22А, соединенные вместе при помощи одного или нескольких сварных швов 133, расположенных вдоль внешних кромок пластины 142 и внутренних кромок внешнего швеллера 140. Полимерный лист или мат 144, изготовленный, например, из синтетического каучука, расположен поверх внутренней пластины 142 ступеньки. Мат 144 соединен с внутренней пластиной 142 при помощи клея, болтов или других аналогичных средств крепления. Пара соединительных кронштейнов 192, каждый из которых имеет отверстие, соединены сваркой с внешним швеллером 140.
Второй шарнирный механизм 120 содержит основной блок 122 крепления, приваренный или иным образом соединенный с внутренней поверхностью 164А базового участка 64А второй стенки, поблизости от второй внешней краевой секции 364В базового участка 64А второй стенки, см. фиг.16. Поворотный шкворень 124 проходит через отверстия в соединительных кронштейнах 192 ступеньки и через отверстие, предусмотренное в основном блоке 122 крепления, см. фиг.21А и 22А. Шплинты (не показаны) могут быть предусмотрены в отверстиях 124А в шкворне 124, чтобы поддерживать шкворень 124 в заданном положении относительно соединительных кронштейнов 192 и основного блока 122. Пара втулок (не показаны) установлены на шкворне 124 и идут через отверстия в соединительных кронштейнах 192. Кронштейн 128 зацепления с пружиной соединен с основным блоком 122 крепления при помощи пары болтов 128А, которые по резьбе введены в отверстия 122В в основном блоке 122 крепления. Торсионная пружина 129 намотана на шкворне 124. Первый конец 129А торсионной пружины 129 входит в зацепление с кронштейном 128, в то время как второй конец 129В торсионной пружины 129 входит в зацепление со ступенькой 92, а более конкретно, с внутренней поверхностью пластины 142 ступеньки. Второй шарнирный механизм 120 позволяет второй ступеньке 92 совершать поворот между ее нижним или развернутым положением, когда ступенька 92 расположена поперек второго входа 68В, см. фиг.2-4, и ее верхним или транспортным положением, когда вторая ступенька 92 расположена так, чтобы не блокировать второй вход 68В в отсек 60 оператора, см. фиг.5. Пружина 129 образует смещающий элемент, который помогает оператору перемещать ступеньку 92 из ее нижнего или развернутого положения в ее верхнее или транспортное положение.
Первый стопорный механизм 200 предусмотрен для блокирования, с возможностью освобождения, первой ступеньки 82 в ее верхнем или транспортном положении, см. фиг.12, 13 и 13А. Второй стопорный механизм 230 предусмотрен для блокирования, с возможностью освобождения, второй ступенька 92 в ее верхнем или транспортном положении, см. фиг.21А. Второй стопорный механизм 230 сконструирован аналогично первому стопорному механизму 200. Поэтому далее будет описан подробно только первый стопорный механизм 200. Специалисты легко поймут, как можно сконструировать второй стопорный механизм 230, пользуясь приведенным здесь описанием первого стопорного механизма 200.
Первый стопорный механизм 200 содержит охватывающий участок 202, имеющий внутреннюю полость 204, с пружиной 206, установленной в выемке 208 на входе 204А во внутреннюю полость 204, см. фиг.12, 13 и 13А. Охватывающий участок 202 соединен с верхним участком 64В второй стенки 64 при помощи болта 210, пропущенного через отверстие в верхнем участке 64В второй стенки и по резьбе введенного в отверстие 202А в охватывающем участке 202, см. фиг.13А и 14. Первый стопорный механизм 200 дополнительно содержит охватываемый участок 220, соединенный с внешним швеллером 130 ступеньки 82, см. фиг.11А, 12, 13, 13А и 15. Гайка 222 навинчена по резьбе на ось 220А охватываемого участка 220, см. фиг.13А. Гайка 222, в свою очередь, приварена к внешнему швеллеру 130 ступеньки 82, см. фиг.11А. Когда первая ступенька 82 переместилась почти в вертикальное положение, оператор может нажать на ступеньку 82 в направлении охватывающего участка 202, с силой, достаточной для перемещения ступеньки 82 в вертикальное положение и также побуждающей охватываемый участок 220 первого стопорного механизма 200 проходить через пружину 206 и входить во внутреннюю полость 204 охватывающего участка 202, см. фиг.13А. Пружина 206 удерживает охватываемый участок 220 во внутренней полости 204 до тех пор, пока оператор не приложит силу к ступеньке 82 в направлении удаления от охватывающего участка 202, достаточную для выхода охватываемого участка 220 из внутренней полости 204, что позволяет вручную повернуть ступеньку 82 вниз в ее развернутое положение, см. фиг.2.
Вместо охватывающего и охватываемого участков 202 и 220 могут быть использованы и другие освобождаемые стопорные механизмы, например, такие как один или несколько магнитов.
Как уже было указано здесь выше, узел 300 тягового двигателя/ тормоза соединен с ведущим колесом 22 тележки, для приведения в движение и торможения ведущего колеса 22. Контроллер 302 управляет работой узла 300 тягового двигателя/ тормоза, см. фиг.27. Первый и второй датчики, объединенные соответственно с первой и второй ступеньками 82 и 92, в показанном варианте представляют собой соответственно первый и второй микропереключатели 304 и 306, соединенные с контроллером 302, см. фиг.27. Первый микропереключатель 304 также соединен с кронштейном 118 зацепления с пружиной, см. фиг.21-23 и 25, в то время как второй микропереключатель 306 также соединен с кронштейном 128 зацепления с пружиной, см. фиг.21А и 22А. На фиг.24 и 26 показан первый микропереключатель 304, однако кронштейн 118 не показан.
Первый кронштейн 182' соединительных кронштейнов 182 первой ступеньки содержит поверхность 382 кулачка, см. фиг.23-26. Когда первая ступенька 82 находится в ее транспортном положении, см. фиг.5, поверхность 382 кулачка входит в зацепление с подпружиненным рычагом 304А управления, образующим часть первого микропереключателя 304, вызывая срабатывание микропереключателя 304. При срабатывании, микропереключатель 304 подает сигнал на контроллер 302, указывающий, что первая ступенька 82 находится в состоянии перемещения (состоянием перемещения в описании настоящего изобретения называют состояние перемещения тележки. - Прим. переводчика), то есть ступенька 82 находится в своем транспортном положении в этом показанном варианте. Однако, когда ступенька 82 повернута против часовой стрелки ориентировочно на 1 градус от вертикали, поверхность 382 кулачка освобождает рычаг 304А управления, что приводит к выключению микропереключателя 304. Когда микропереключатель 304 выключен, он подает сигнал на контроллер 302, указывающий, что первая ступенька 82 больше не находится в состоянии перемещения.
Второй кронштейн 192' соединительных кронштейнов 192 второй ступеньки содержит поверхность 392 кулачка, см. фиг.21А и 22А. Когда вторая ступенька 92 находится в ее транспортном положении, поверхность 392 кулачка входит в зацепление с подпружиненным рычагом 306А управления, образующим часть второго микропереключателя 306, вызывая срабатывание микропереключателя 306. При срабатывании, микропереключатель 306 подает сигнал на контроллер 302, указывающий, что вторая ступенька 92 находится в состоянии перемещения, то есть ступенька 92 находится в своем транспортном положении в показанном варианте.
Однако, после поворота ступеньки 92 против часовой стрелки ориентировочно на 1 градус от вертикали, поверхность 392 кулачка освобождает рычаг 306А управления, что приводит к выключению микропереключателя 306. Когда микропереключатель 306 выключен, он подает сигнал на контроллер 302, указывающий, что вторая ступенька 92 больше не находится в состоянии перемещения.
Контроллер 302, в ответ на команды оператора, подает сигналы управления на узел 300 тягового двигателя/ тормоза, чтобы приводить во вращение колесо 22 только тогда, когда он получает сигналы от обоих первого и второго микропереключателей 304 и 306, указывающие, что ступеньки 82 и 92 находятся в их состояниях перемещения, то есть находятся в их транспортных положениях в этом показанном варианте. Однако, если контроллер 302 получает сигнал от первого микропереключателя 304, что первая ступенька 82 больше не находится в состоянии перемещения, или сигнал от второго микропереключателя 306, что вторая ступенька 92 больше не находится в состоянии перемещения, то контроллер 302 не подает сигнал управления на узел 300 тягового двигателя/ тормоза, то есть контроллер 302 только позволяет узлу 300 тягового двигателя/ тормоза тормозить колесо 22, но не позволяет узлу 300 тягового двигателя/ тормоза приводить во вращение колесо 22. Когда контроллер 302 получает сигнал от первого микропереключателя 304, что первая ступенька 82 больше не находится в состоянии перемещения, или сигнал от второго микропереключателя 306, что вторая ступенька 92 больше не находится в состоянии перемещения, то контроллер 302 преимущественно побуждает узел 300 тягового двигателя/ тормоза тормозить колесо 22.
Несмотря на то, что были использованы микропереключатели 304 и 306 в качестве первого и второго датчиков в показанном варианте, специалисты легко поймут из описания настоящего изобретения, что датчики Холла, другие датчики приближения и/или другие устройства, расположенные в других местоположениях относительно ступенек 82 и 92, например, поблизости от вторых концов 82В и 92В ступенек 82 и 92, могут быть использованы в качестве первого и второго датчиков в соответствии с настоящим изобретением.
Несмотря на то, что это не показано на чертежах, предполагается, что первая и вторая ступеньки 82 и 92 могут скользить между развернутым и транспортным положениями. Предполагается также, что первая и вторая ступеньки 82 и 92 могут совершать поворот из горизонтального положения в вертикальное положение, ранее перемещения в гнездо хранения, чтобы быть убранными в вертикальном положении. После вытягивания из гнезда хранения для развертывания, каждую ступеньку 82, 92 поворачивают из ее вертикального положения в ее горизонтальное положение.
Альтернативные схемы управления могут быть предпочтительными в некоторых применениях. Например, может быть желательно, чтобы тележка могла двигаться, когда ступенька 82, 92 находится в ее нижнем, развернутом положении, если необходимо произвести несколько отборов из рядов верхних ячеек стеллажа. Для выполнения такой операции, датчик может быть введен в ступеньку, введен в упор, который поддерживает ступеньку или объединен со ступенькой иным образом, так чтобы датчик срабатывал, когда ступенька развернута. Таким образом, тележка может двигаться, когда ступенька находится в транспортном или развернутом положениях, но не когда ступенька находится в любом положении между своими транспортным и развернутым положениями.
Для этого режима работы было бы желательно предотвращать перемещение тележки, если оператор стоит на ступеньке. Таким образом, в то время как датчик указывает, что ступенька развернута, этот или другой датчик также указывает, что ступенька используется, то есть оператор стоит на ступеньке или иным образом прикладывает к ней заданную силу, например, сидит на ступеньке, положил на нее пакет или другой объект, и т.д. Если поступает индикация об использовании ступеньки, то движение тележки не допускается.
Единственный датчик может быть использован для выработки первого сигнала, когда ступенька развернута, то есть когда сила создается весом ступеньки, но никакая другая сила не приложена к ступеньке, и для выработки второго сигнала, если ступенька развернута и используется, о чем свидетельствует сила выше заданного порогового значения, то есть некоторая сила, превышающая вес собственно ступеньки, приложенная к ступеньке. Например, датчиком может быть трехпозиционный переключатель, который замыкает (или размыкает) первый контакт при приложении веса развернутой ступеньки и создает первый сигнал, и замыкает (или размыкает) второй контакт при приложении увеличенного веса и создает второй сигнал.
В этом варианте, "состояние перемещения" соответствует состоянию, когда ступенька находится в своем развернутом положении, о чем свидетельствует первый сигнал, но не когда ступеньку используют, о чем свидетельствует второй сигнал. В этом варианте также может быть использован датчик убранного состояния ступеньки, так что "состояние перемещения " соответствует состоянию, когда ступенька убрана.
Альтернативно, в ступеньке может быть предусмотрен датчик; например, такое устройство, как чувствительный к весу пьезоэлектрический элемент или другое аналогичное устройство, могут быть встроены в ступеньку, чтобы обнаруживать деформацию ступеньки, созданную за счет развертывания ступеньки, и за счет этого вырабатывать первый сигнал, и чтобы обнаруживать дополнительную деформацию, созданную за счет дополнительного веса, приложенного к ступеньке и соответствующего заданной силе, приложенной к ступеньке, такой как сила, возникающая в том случае, когда оператор становится на ступеньку, и за счет этого вырабатывать второй сигнал. Датчик давления, установленный на обращенной вверх поверхности ступеньки, под матом ступеньки, может быть использован для выработки второго сигнала в ответ на давление, приложенное к верхней поверхности ступеньки, например, когда оператор стоит на мате (коврике) ступеньки.
В этом случае, "состояние перемещения" также соответствует состоянию, когда ступенька находится в своем развернутом положении, о чем свидетельствует первый сигнал, но не когда ступеньку используют, о чем свидетельствует второй сигнал. В этом варианте также может быть использован датчик убранного состояния ступеньки, так что "состояние перемещения " соответствует состоянию, когда ступенька убрана.
Кроме того, один или несколько датчиков, чувствительных к весу, могут быть установлены в шарнирном механизме 110, 120 ступеньки 82, 92.
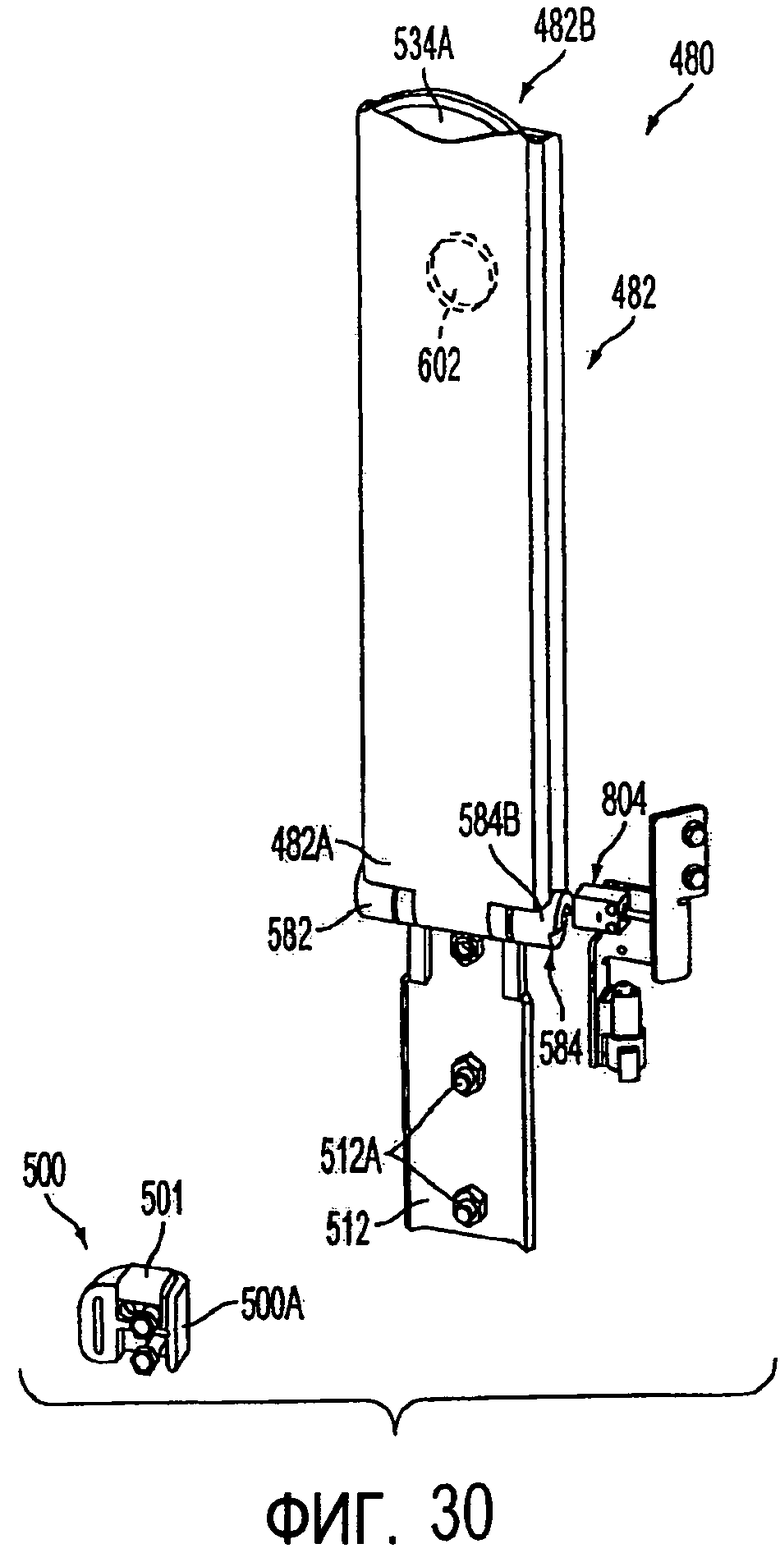
Первый и второй узлы 480 и 490 ступенек и первый и второй упоры 500 и 502, сконструированные в соответствии со вторым вариантом настоящего изобретения, показаны на фиг.28. Узел 480 первой ступеньки содержит первую ступеньку 482, см. фиг.28-30, выполненную с возможностью поворота между развернутым положением, в котором ступенька 482 расположена поперек первого входа в отсек оператора (не показан на фиг.28-30) и транспортным положением, в котором первая ступенька 482 расположен так, чтобы не блокировать первый вход в отсек оператора. Отсек оператора может быть ограничен противоположными первой и второй стенками, такими как первая и вторая противоположные стенки 62 и 64, показанные на фиг.1-6. В развернутом положении, второй конец 482В ступеньки 482, противоположный первому концу 482А ступеньки 482, входит в зацепление с упором 500 или упирается в него. Упор 500 соединен болтами или иным образом с первой стенкой отсека оператора, в таком местоположении на первой стенке, что ступенька 482 расположена в целом в горизонтальной плоскости, когда она развернута. Когда первая ступенька 482 находится в развернутом положении, оператор может встать на ступеньку 482, чтобы получать доступ к верхней ячейке стеллажа.
Узел 490 второй ступеньки содержит вторую ступеньку 492, см. фиг.28, выполненную с возможностью поворота между развернутым положением, в котором ступенька 492 расположена поперек второго входа в отсек оператора, и транспортным положением, когда вторая ступенька 492 расположена так, чтобы не блокировать второй вход в отсек оператора. В развернутом положении, второй конец 492В ступеньки 492, противоположный первому концу 492А ступеньки 492, входит в зацепление с упором 502 или упирается в него. Упор 502 соединен болтами или иным образом с первой стенкой отсека оператора, в таком местоположении на первой стенке, что ступенька 492 расположена в целом в горизонтальной плоскости. Когда вторая ступенька 492 находится в развернутом положении, оператор может встать на ступеньку 492, чтобы получать доступ к верхней ячейке стеллажа.
Узел 480 первой ступеньки дополнительно содержит первый шарнирный механизм 510 для соединения ступеньки 482 с базовым участком 664А второй стенки 664 отсека оператора, см. фиг.31, 32 и 34. Узел 490 второй ступеньки дополнительно содержит второй шарнирный механизм 520 для соединения ступеньки 492 с базовым участком 664А второй стенки 664, см. фиг.34. Вторая стенка 664 образует одну из стенок батарейного отсека 650.
Первая ступенька 482 содержит внешний швеллер 530 и внутреннюю пластину 532 ступеньки, см. фиг.28, соединенные вместе при помощи одного или нескольких сварных швов (не показаны), расположенных вдоль внешних кромок пластины 532 ступеньки и внутренних кромок внешнего швеллера 530. Полимерный лист или мат 534, изготовленный, например, из синтетического каучука, расположен поверх внутренней пластины 532 ступеньки и содержит участок 534А захвата, идущий поверх лапки 482С, образованной концами внешнего швеллера 530 и внутренней пластины 532 ступеньки, см. фиг.28 и 32. Лапка 482С и участок 534А захвата образуют второй конец 482В ступеньки 482. Участок 534А захвата, так как он изготовлен из поглощающего звук полимерного материала, служит для уменьшения уровня звука, когда ступенька 482 входит в контакт с упором 500. Мат 534 может быть соединен с внутренней пластиной 532 и лапкой 482С при помощи клея, болтов или других аналогичных средств крепления.
Первая ступенька 482 дополнительно содержит первый и второй соединительные кронштейны 582 и 584, имеющие соответствующие отверстия 582А, 584А, см. фиг.28. Первый и второй соединительные кронштейны 582 и 584 соединены с внешним швеллером 530.
Первый шарнирный механизм 510 содержит основной блок 512 крепления, соединенный при помощи болтов 512А с внешней поверхностью 664В базового участка 664А второй стенки 664, см. фиг.31, 32 и 34. Основной блок 512 крепления снабжен парой кронштейнов 513, каждый из которых имеет отверстие 513А, см. фиг.28. Поворотный шкворень 514 проходит через отверстия 582А, 584А в первом и втором соединительных кронштейнах 582 и 584 первой ступеньки 482 и через отверстия 513А в кронштейнах 513, которые представляют собой часть основного блока 512 крепления, см. фиг.28 и 33. Шплинт или установочный винт 514А пропущен через шкворень 514 и соединен с одним из кронштейнов 513 основного блока крепления, так чтобы поддерживать шкворень 514 в заданном положении относительно основного блока 512 крепления.
Первая и вторая втулки 516А и 516В установлены на шкворне 514 и идут через отверстия 582А, 584А в соединительных кронштейнах 582, 584, см. фиг.28 и 33. Втулки 516А, 516В позволяют первому и второму соединительным кронштейнам 582, 584 и, следовательно, ступеньке 482, вращаться относительно шкворня 514 и основного блока 512 крепления. Трубка 519А надета на шкворень 514 и расположена между первой и второй втулками 516А и 516В. Торсионная пружина 519 намотана на шкворне 514 и трубке 519А, см. фиг.28 и 33. Первый конец 519В торсионной пружины 519 входит в отверстие 512B в блоке 512 крепления, в то время как второй конец 519С торсионной пружины 519 входит в зацепление со ступенькой 482, см. фиг.28 и 33А.
Первый шарнирный механизм 510 позволяет первой ступеньке 482 совершать поворот вперед и назад между ее нижним или развернутым положением, когда ступенька 482 расположена поперек первого входа в отсек оператора, и ее верхним или транспортным положением, когда первая ступенька 482 расположена так, чтобы не блокировать первый вход в отсек оператора. Пружина 519 образует смещающий элемент, который помогает оператору перемещать ступеньку 482 из ее нижнего или развернутого положения в ее верхнее или транспортное положение.
Вторая ступенька 492 содержит внешний швеллер 540 и внутреннюю пластину 542 ступеньки, см. фиг.28 и 28А, соединенные вместе при помощи одного или нескольких сварных швов (не показаны), расположенных вдоль внешних кромок пластины 542 ступеньки и внутренних кромок внешнего швеллера 540. Полимерный лист или мат 544, изготовленный, например, из синтетического каучука, расположен поверх внутренней пластины 542 ступеньки и содержит участок 544А захвата, идущий поверх лапки 492С, образованной концами внешнего швеллера 540 и внутренней пластины 542 ступеньки, см. фиг.28, 28А и 28В. Лапка 492С и участок 544А захвата образуют второй конец 492В ступеньки 492. Участок 544А захвата служит для уменьшения уровня звука, который может возникать, когда ступенька 492 входит в контакт с упором 502. Мат 544 может быть соединен с внутренней пластиной 542 и лапкой 492С при помощи клея, болтов или других аналогичных средств крепления.
Вторая ступенька 492 дополнительно содержит первый и второй соединительные кронштейны 592 и 594, имеющие соответствующие отверстия 592А, 594А, см. фиг.28А. Первый и второй соединительные кронштейны 592 и 594 соединены с внешним швеллером 540.
Второй шарнирный механизм 520 содержит основной блок 522 крепления, соединенный при помощи болтов 522А с внешней поверхностью 664В базового участка 664А второй стенки 664, см. фиг.34. Основной блок 522 крепления снабжен парой кронштейнов 523, каждый из которых имеет отверстие 523А, см. фиг.28А и 28В, Поворотный шкворень 524 проходит через отверстия 592А, 594А в первом и втором соединительных кронштейнах 592 и 594 второй ступеньки 492 и через отверстия 523А в кронштейнах 523, которые представляют собой часть основного блока 522 крепления. Шплинт или установочный винт 524А пропущен через шкворень 524 и соединен с одним из кронштейнов 523 основного блока крепления, так чтобы поддерживать шкворень 524 в заданном положении относительно основного блока 512 крепления.
Первая и вторая втулки 526А и 526В установлены на шкворне 524 и идут через отверстия 592А, 594А в соединительных кронштейнах 592, 594. Втулки 526А, 526В позволяют первому и второму соединительным кронштейнам 592, 594 и, следовательно, ступеньке 492, вращаться относительно шкворня 524 и основного блока 522 крепления. Трубка 529А надета на шкворень 524 и расположена между первой и второй втулками 526А и 526В. Торсионная пружина 529 намотана на шкворне 514 и трубке 529А. Первый конец 529В торсионной пружины 529 входит в отверстие 522В в блоке 522 крепления, в то время как второй конец 529С торсионной пружины 529 входит в зацепление со ступенькой 492.
Второй шарнирный механизм 520 позволяет второй ступеньке 492 совершать поворот вперед и назад между ее нижним или развернутым положением, когда ступенька 492 расположена поперек второго входа в отсек оператора, и ее верхним или транспортным положением, когда вторая ступенька 482 расположена так, чтобы не блокировать второй вход в отсек оператора. Пружина 529 образует смещающий элемент, который помогает оператору перемещать ступеньку 492 из ее нижнего или развернутого положения в ее верхнее или транспортное положение.
Первый стопорный механизм 600 предусмотрен для блокирования, с возможностью освобождения, первой ступеньки 482 в ее верхнем или транспортном положении, см. фиг.28 и 32. Второй стопорный механизм 630 предусмотрен для блокирования, с возможностью освобождения, второй ступенька 492 в ее верхнем или транспортном положении. Второй стопорный механизм 630 сконструирован аналогично первому стопорному механизму 600. Поэтому далее будет описан подробно только первый стопорный механизм 600. Специалисты легко поймут, как можно сконструировать второй стопорный механизм 630, пользуясь приведенным здесь описанием первого стопорного механизма 600.
Первый стопорный механизм 600 содержит магнит 602, прикрепленный при помощи болта 604 к удлинению 531 внешнего швеллера 530, см. фиг.32, и расположенный внутри отверстия 532А во внутренней пластине 532 ступеньки, см. фиг.28. Мат 534 закрывает магнит 602. Когда ступенька 4S2 расположена в ее верхнем или транспортном положении, магнит 602 притягивается к противоположной выступающей секции 664С второй стенки 664, что позволяет удерживать, с возможностью освобождения, ступеньку 482 в ее транспортном положении, см. фиг.32.
Упор 500 содержит корпус 500А и резиновый упорный элемент 501, прикрепленный к корпусу 500А при помощи болтов 501А, см. фиг.28. Когда ступенька 482 перемещается в ее развернутое положение, упорный элемент 501 амортизирует завершающий удар ступеньки 482 в упор 500. Упор 502 содержит корпус 502А и резиновый упорный элемент 503, прикрепленный к корпусу 502А при помощи болтов 503А, см. фиг.28А. Когда ступенька 492 перемещается в ее развернутое положение, упорный элемент 503 амортизирует завершающий удар ступеньки 492 в упор 502.
Как уже было указано здесь выше, узел 300 тягового двигателя/ тормоза соединен с ведущим колесом 22 тележки, для приведения в движение и торможения ведущего колеса 22. Контроллер 302 управляет работой узла 300 тягового двигателя/ тормоза, см. фиг.27А. Во втором варианте, первый и второй датчики, которые объединены соответственно с первой и второй ступеньками 482 и 492, содержат первый и второй датчики 804 и 806 приближения, см. фиг.27А. Датчики 804 и 806 имеют связь с контроллером 302. Первый датчик 804 приближения также соединен с первым кронштейном 805 крепления при помощи болтов 804А, а второй датчик 806 приближения соединен со вторым кронштейном 807 крепления при помощи болтов 806А, см. фиг.28. Первый кронштейн 805 крепления соединен с внутренней поверхностью второй стенки 664 при помощи болтов 805А, а второй кронштейн 807 крепления соединен с внутренней поверхностью второй стенки 664 при помощи болтов 807А, см. фиг.34. Внутренняя поверхность второй стенки 664 расположена напротив внешней поверхности 664В, показанной на фиг.34.
Второй соединительный кронштейн 584 первой ступеньки 482 содержит флажок 584В, см. фиг.30, 33, 33А. Когда первая ступенька 482 находится в своем транспортном положении, см. фиг.31, 32 и 33, флажок 584В расположен непосредственно поперек (напротив) датчика 804 приближения, что побуждает датчик 804 приближения срабатывать. При срабатывании, датчик 804 приближения подает сигнал на контроллер 302, указывающий, что первая ступенька 482 находится в состоянии перемещения, то есть что ступенька 482 находится в своем транспортном положении в этом показанном варианте. Однако, когда ступенька 482 повернута на угол ориентировочно от 1 до 10 градусов, а преимущественно около 5 градусов от вертикали, флажок 584В совершает поворот на угол, достаточный для того, чтобы вызвать выключение датчика 804 приближения. Когда датчик приближения 804 выключается, он подает сигнал на контроллер 302, указывающий, что первая ступенька 482 больше не находится в состоянии перемещения. На фиг.33А ступенька 482 показана в ее развернутом положении, в котором флажок 584В расположен на достаточном расстоянии удаления от датчика 804 приближения, так что датчик 804 приближения выключен.
Второй соединительный кронштейн 594 второй ступеньки 492 содержит флажок 594В, см. фиг.28А и 28В. Когда вторая ступенька 492 находится в своем транспортном положении, флажок 594В расположен непосредственно поперек (напротив) датчика 806, приближения, что побуждает датчик 806 приближения срабатывать. При срабатывании, датчик 806 приближения подает сигнал на контроллер 302, указывающий, что вторая ступенька 492 находится в состоянии перемещения, то есть что ступенька 492 находится в своем транспортном положении в этом показанном варианте. Однако, когда ступенька 492 повернута на угол ориентировочно от 1 до 10 градусов, а преимущественно около 5 градусов от вертикали, флажок 594В совершает поворот на угол, достаточный для того, чтобы вызвать выключение датчика 806 приближения. Когда датчик приближения 806 выключается, он подает сигнал на контроллер 302, указывающий, что вторая ступенька 492 больше не находится в состоянии перемещения.
Контроллер 302, в ответ на команды оператора, подает сигналы управления на узел 300 тягового двигателя/ тормоза, чтобы приводить во вращение колесо 22 только тогда, когда он получает сигналы от обоих первого и второго датчиков 804 и 806 приближения, указывающие, что ступеньки 482 и 492 находятся в их состоянии перемещения, то есть находятся в их транспортных положениях в этом показанном варианте. Однако, если контроллер 302 получает сигнал от первого датчика 804 приближения, что первая ступенька 482 больше не находится в состоянии перемещения, или сигнал от второго датчика 806 приближения, что вторая ступенька 492 больше не находится в состоянии перемещения, то контроллер 302 не подает сигнал управления на узел 300 тягового двигателя/ тормоза, то есть контроллер 302 только позволяет узлу 300 тягового двигателя/ тормоза тормозить колесо 22, но не позволяет узлу 300 тягового двигателя/ тормоза приводить во вращение колесо 22. Когда контроллер 302 получает сигнал от первого датчика 804 приближения, что первая ступенька 482 больше не находится в состоянии перемещения, или сигнал от второго датчика 806 приближения, что вторая ступенька 492 больше не находится в состоянии перемещения, то контроллер 302 преимущественно побуждает узел 300 тягового двигателя/ тормоза тормозить колесо 22.
Несмотря на то, что были описаны предпочтительные варианты осуществления изобретения, совершенно ясно, что в него специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят однако за рамки формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕЖКА ДЛЯ ПОГРУЗКИ-РАЗГРУЗКИ МАТЕРИАЛОВ | 2007 |
|
RU2445253C2 |
| СЕНСОРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РЫЧАГА МЕХАНИЗМА НАТЯЖЕНИЯ ШПАГАТА | 2013 |
|
RU2644595C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ПОГРУЗКИ И РАЗГРУЗКИ МАТЕРИАЛА И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ (ВАРИАНТЫ) | 2003 |
|
RU2365711C2 |
| ПРОМЫШЛЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2006 |
|
RU2397885C2 |
| АТТРАКЦИОН ПАРКА РАЗВЛЕЧЕНИЙ С СИДЯЧЕЙ ИМИТАЦИЕЙ ДВИЖЕНИЯ | 2018 |
|
RU2720576C1 |
| ФОТОЛЮМИНЕСЦЕНТНАЯ РУЧКА СТУПЕНЬКИ | 2016 |
|
RU2708145C2 |
| АТТРАКЦИОН ПАРКА РАЗВЛЕЧЕНИЙ С ИМИТАЦИЕЙ ДВИЖЕНИЯ | 2018 |
|
RU2727814C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ СОЗДАНИЯ РЕЦЕПТА НАПИТКА ДЛЯ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ДЛЯ ДОЗИРОВАНИЯ И ПЕРЕМЕШИВАНИЯ/СМЕШИВАНИЯ ИНГРЕДИЕНТОВ НАПИТКА | 2009 |
|
RU2501076C2 |
| ИНТЕГРИРОВАННЫЙ СПОСОБ И СИСТЕМА ДЛЯ ДОЗИРОВАНИЯ И ПЕРЕМЕШИВАНИЯ/СМЕШИВАНИЯ ИНГРЕДИЕНТОВ НАПИТКА | 2009 |
|
RU2503246C2 |
| САМОХОДНАЯ БУФЕРНАЯ ПЛАТФОРМА | 2011 |
|
RU2477692C1 |
Тележка (10) для погрузки-разгрузки материалов содержит раму (12), которая включает отсек (60) оператора, имеющий вход (68А, 68В) и пол (66). Тележка дополнительно содержит ступеньку (82, 482), которая выполнена с возможностью расположения поперек входа со смещением выше пола, так что оператор может встать на указанную ступеньку, чем облегчается доступ к верхней ячейке стеллажа. 10 з.п. ф-лы, 41 ил.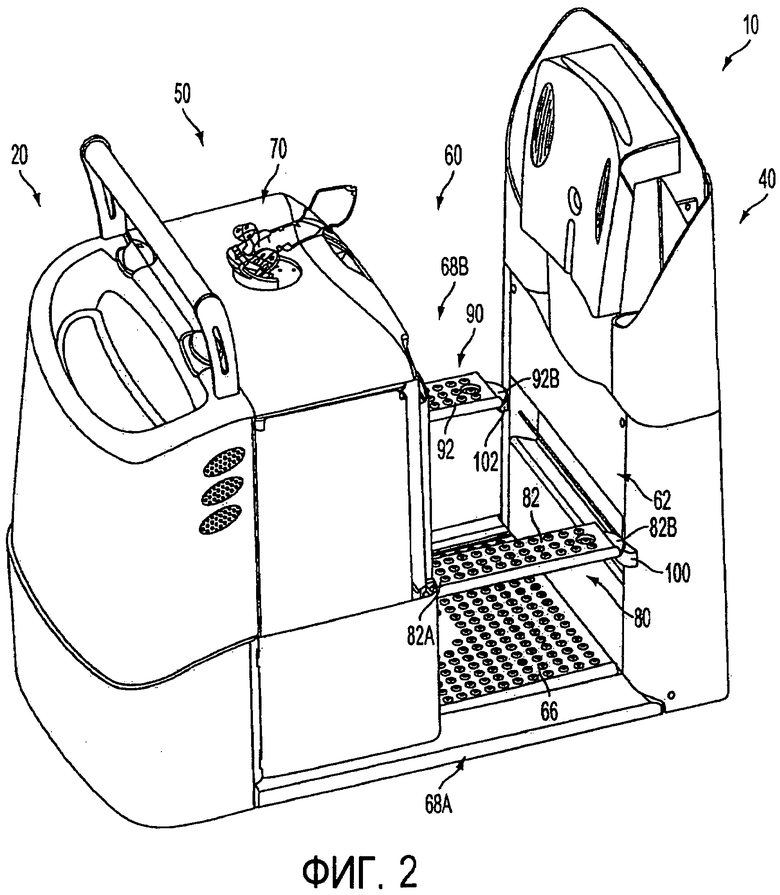
1. Тележка (10) для погрузки-разгрузки материалов, содержащая:
раму, которая содержит отсек (60) оператора, имеющий по меньшей мере один вход (68А) и пол (66);
по меньшей мере одну ступеньку (82, 482), которая выполнена с возможностью расположения поперек указанного входа (68А) со смещением выше пола (66), так что оператор может встать на указанную ступеньку, когда она расположена поперек входа, чтобы получать доступ к верхней ячейке стеллажа.
2. Тележка по п. 1, в которой ступенька (82, 482) выполнена с возможностью перемещения между развернутым положением, в котором она расположена поперек входа (68А), и транспортным положением, в котором она расположена так, чтобы не блокировать вход в отсек (60) оператора и выход из него.
3. Тележка по п. 2, в которой ступенька (82, 482) выполнена с возможностью скольжения между развернутым и транспортным положениями.
4. Тележка по п. 2, которая дополнительно содержит по меньшей мере один шарнирный механизм (110, 510), соединенный с указанной по меньшей мере одной ступенькой (82, 482), для поворота ее между развернутым и транспортным положениями.
5. Тележка по п. 4, в которой ступенька (82, 482) находится в нижнем положении, когда она развернута, и в верхнем положении, когда она убрана, и дополнительно содержит смещающий элемент (119, 519) для содействия оператору в перемещении ступеньки из нижнего положения в верхнее положение.
6. Тележка по п. 5, в которой отсек (60) оператора дополнительно содержит первую и вторую стенки (62, 64, 664) и упор (100, 500), соединенный с первой стенкой, причем ступенька (82, 482) шарнирно соединена на первом конце с второй стенкой, а
второй конец ступеньки входит в зацепление с указанным упором, когда ступенька перемещена в нижнее положение.
7. Тележка по п. 6, которая дополнительно содержит стопорный механизм (200, 600), объединенный с второй стенкой (64, 664), для блокирования, с возможностью освобождения, ступеньки (82, 482), когда она перемещена в верхнее положение.
8. Тележка по п. 2, которая дополнительно содержит:
ведущее колесо (22), соединенное с рамой (12);
двигатель (300), соединенный с указанным ведущим колесом для осуществления его вращения;
контроллер (302) для управления работой указанного двигателя (300); и
по меньшей мере один датчик (304, 804), объединенный со ступенькой (82, 482), причем датчик подает сигнал на указанный контроллер, когда ступенька находится в состоянии перемещения, при этом контроллер подает сигнал возбуждения на двигатель тогда, когда сигнал состояния перемещения вырабатывается при помощи указанного датчика.
9. Тележка по п. 1, в которой ступенька (82, 482) расположена над полом (66) на расстоянии от 250 мм до 450 мм.
10. Тележка по п. 1, в которой отсек (60) оператора представляет собой сквозной отсек, имеющий первый и второй входы (68А, 68В), и которая имеет первую и вторую ступеньки (82, 92, 482, 492), причем первая ступенька выполнена с возможностью установки поперек первого входа (68А) со смещением от пола (66), а вторая ступенька выполнена с возможностью установки поперек второго входа со смещением от пола, причем оператор может стоять на одной из указанных первой и второй ступенек, когда одна ступенька расположена поперек соответствующего одного из первого или второго входов, чтобы получить доступ к верхней ячейке стеллажа.
11. Тележка по п. 10, в которой первая ступенька (82, 482) выполнена с возможностью перемещения между развернутым положением, в котором она расположена поперек первого входа (68А), и транспортным положением, в котором первая ступенька расположена так, чтобы не блокировать первый вход в отсек (60) оператора, а вторая ступенька (92, 492) выполнена с возможностью перемещения между развернутым положением, в котором она (92) расположена поперек второго входа (68В), и транспортным положением, в котором вторая ступенька расположена так, чтобы не блокировать второй вход в отсек оператора.
| DE 19730156 A1, 21.01.1999 | |||
| JP 2001213594 A, 07.08.2001; | |||
| Устройство для защиты электродвигателя от перегрева | 1979 |
|
SU936178A2 |
| US 4750752 A, 14.06.1988 | |||
| US 6357773 A, 19.03.2002 | |||
| US 3656578 A, 18.04.1972 | |||
| US 2004099461 A1, 27.05.2004 | |||
| US 5050700 A, 24.09.1991 | |||

