Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству и способу для управления положением подвижной части кузова автомобиля, охарактеризованным в независимых пунктах формулы изобретения.
Уровень техники
В автомобилях все более широко используются устройства, которые должны облегчать управление подвижными частями кузова или служить для защиты от заклинивания или для управления перемещением дверей. Так, например, из публикации DE-A 19813513 известна система управления открытием и закрытием раздвижных дверей, установленная на боковой стороне кузова автомобиля. Раздвижная дверь приводится в движение приводным механизмом, например электродвигателем, в соответствии с наклоном раздвижной двери, когда транспортное средство наклонено относительно вертикали по своей продольной оси, т.е. когда транспортное средство останавливается на наклонном участке дороги.
В публикации DE-A 102005019846 раскрыто устройство управления для оптимизации функции открытия и закрытия оборудованной газонаполненным амортизатором задней двери, включающее в себя датчик для детектирования угла раскрытия задней двери относительно корпуса автомобиля. Электронный блок управления принимает зарегистрированный датчиком угол и выдает управляющий сигнал регулирования давления. Газонаполненный амортизатор регулирует давление в цилиндре в соответствии с управляющим сигналом блока управления.
Далее из публикации ЕР-А 1652708 известна двухсекционная задняя дверь, состоящая из верхней и нижней частей кузова. С помощью электродвигателей управление верхней и нижней частями кузова осуществляется таким образом, чтобы они двигались синхронно друг с другом. В публикации JP-A 2005194767 описан датчик перемещений для контроля положения раздвижной двери, причем датчик имеет такое расположение и такую конструкцию, которые позволяют избежать переразрядки автомобильного аккумулятора. Кроме того, в публикации JP-A 2005016252 раскрыт датчик перемещений, который передает сигнал устройству управления исполнительным механизмом для плавного открытия и закрытия двери автомобиля.
Из публикации DE-A 19755259 известно, что микропроцессоры управления различными исполнительными механизмами можно переводить в режим ожидания, чтобы снизить потребление электроэнергии в автомобиле. Посредством электронного коммутационного устройства на микропроцессор могут подаваться сигналы активизации (пробуждения) и действия выделенным для коммутационного устройства внешним выключателем, чтобы перевести микропроцессор из режима ожидания в рабочий режим. При этом коммутационное устройство имеет переключательную схему режима ожидания для генерирования активизирующего сигнала, включающего прерывание режима ожидания, когда нужно перевести микропроцессор из режима ожидания в рабочий режим, и переключательную схему рабочего режима для генерирования сигналов действия, причем переключательная схема режима ожидания подключена к допускающему активизацию цифровому входу, а переключательная схема рабочего режима - к аналоговому входу микропроцессора и для обеих переключательных схем выделен по меньшей мере один внешний выключатель.
Из публикации ЕР 625625 А1 известно устройство управления дверью. Это устройство содержит двигатель, открывающий или закрывающий дверь. В случае обнаружения перемещения двери вручную на заданное расстояние при выключенном двигателе двигатель включается для того, чтобы переместить дверь в том же направлении и тем самым завершить перемещение двери, инициированное вручную.
Предлагаемое в изобретении устройство для управления положением подвижной части кузова автомобиля, включающее в себя исполнительный механизм для перемещения подвижной части кузова и блок управления для управления исполнительным механизмом в рабочем состоянии, причем при отсутствии перемещения подвижной части кузова в течение определенного промежутка времени блок управления переходит из рабочего состояния в состояние покоя (бездействия), а также соответствующий способ управления положением подвижной части кузова имеют то преимущество по сравнению с уровнем техники, что помимо дальнейшего снижения потребления тока в состоянии покоя они позволяют отказаться от дополнительного чувствительного элемента для детектирования (обнаружения) перемещения подвижной части кузова, от дополнительного средства переключения и/или дополнительного измерения тока, необходимых для обратного перевода блока управления из состояния ожидания в рабочее состояние. Теперь это обеспечивается перемещением подвижной части кузова вручную. Таким образом, в предпочтительном варианте исполнения достаточно, чтобы блок управления обходился уже используемыми детекторами для определения положения или регистрацией положения подвижной части кузова без применения детекторов или датчиков. При перемещении подвижной части кузова в состоянии покоя или в фазе активизации блока управления может обнаружиться расхождение между хранящимся в памяти и фактическим положением подвижной части кузова. Поэтому в соответствии с изобретением блок управления имеет средства коррекции для коррекции положения перемещенной части кузова, изменившегося в фазе активизации при переходе из состояния покоя в рабочее состояние, причем фаза активизации блока управления включает в себя промежуток времени от перемещения подвижной части кузова вручную до считывания из памяти сохраненного в ней положения. Средствами коррекции могут быть, например, хранящийся в памяти алгоритм или поисковая таблица, причем поправочное значение определяется в зависимости от противоэлектродвижущей силы. В качестве другого поправочного значения в этой связи может служить зарегистрированная крутизна изменения противоэлектродвижущей силы, являющаяся мерой воздействия силы на подвижную часть кузова во время перемещения вручную. Кроме того, можно определять и сохранять в памяти в качестве поправочного значения среднее число тактовых импульсов детектора положения в фазе активизации.
Другие преимущества изобретения следуют из признаков, охарактеризованных в зависимых пунктах формулы изобретения, а также из чертежей и приведенного ниже описания.
В предпочтительном варианте осуществления изобретения исполнительным механизмом является электродвигатель, который для генерирования сигнала активизации работает в режиме генератора, а значит использует обратную электродвижущую силу или противоэлектродвижущую силу, которая действует на секции обмотки при перемещении подвижной части кузова вручную. Таким образом, вследствие перемещения подвижной части кузова вручную генерируется импульс напряжения и/или тока, который служит для блока управления сигналом активизации. В альтернативном варианте осуществления изобретения активизирующее средство находится во взаимодействии с подвижной частью кузова, поэтому перемещение подвижной части кузова вручную вызывает изменение напряжения и/или тока, которое служит в качестве активизирующего сигнала для блока управления. При этом в качестве активизирующего средства предпочтительно использовать потенциометр, прежде всего ползунковый реостат, и/или встроенный в исполнительный механизм датчик Холла.
Другое преимущество состоит в регистрации фактического положения подвижной части кузова в рабочем состоянии блока управления посредством детектора положения, причем блок управления перед его переводом из рабочего состояния в состояние ожидания сохраняет в памяти зарегистрированное детектором положения фактическое положение подвижной части кузова. Кроме того, это позволяет прерывать электропитание детектора положения от блока управления для дальнейшего снижения потребления энергии в состоянии покоя. После возврата блока управления в рабочее состояние сохраненное положение считывается из памяти, причем блок управления снова активизирует детектор положения для регистрации положения подвижной части кузова. При этом по экономическим соображениям и в целях экономии монтажного пространства предпочтительно, чтобы детектор положения представлял собой встроенный в исполнительный механизм датчик Холла. Предпочтительно он может также взять на себя функцию активизирующего средства, однако при этом следует избегать прерывания электропитания для снижения потребления тока в состоянии покоя. Альтернативно или дополнительно к этому в качестве детектора положения можно использовать активизирующее средство, взаимодействующее с подвижной частью кузова. Однако, как и при использовании датчика Холла, в этом случае также не следует принимать мер для прерывания электроснабжения активизирующего средства. Кроме того, можно полностью отказаться от детектора положения, если анализировать в блоке управления волнистость сигнала связи, управляющего исполнительным механизмом, выполненным в виде электродвигателя, для регистрации положения подвижной части кузова в рамках способа подсчета со сквозным переносом. И в этом случае блок управления перед переводом из рабочего состояния в состояние покоя может сохранять в памяти зарегистрированное фактическое положение подвижной части кузова.
Для постоянного обеспечения как можно более точного определения фактического положения подвижной части кузова предусмотрен вариант, в котором блок управления в определенные моменты времени в соответствующем конечном положении подвижной части кузова, т.е. в ее полностью открытом или закрытом состоянии, выполнял операцию калибровки. При этом частота операций калибровки зависит от требуемой точности процессов активизации и перемещения.
В диагностической ветви и/или в схеме помехоподавления исполнительного механизма может возникать ток утечки, ведущий к непреднамеренной активизации блока управления, особенно при повышенных окружающих температурах. Во избежание этого предусмотрены электрические средства, которые, в случае их исполнения в виде по меньшей мере одного коммутационного средства, отсоединяют диагностическую ветвь и/или помехоподавляющую схему исполнительного механизма от электрического потенциала массы. В альтернативном варианте осуществления изобретения электрические средства могут включать в себя по меньшей мере одну резисторную схему, соединенную с диагностической ветвью и/или помехоподавляющей схемой исполнительного механизма и рассчитанную таким образом, чтобы вызываемое током утечки падение напряжения не превышало заданного предельного значения для активизации блока управления.
Предлагаемое в изобретении устройство и соответствующий способ особенно целесообразно использовать применительно к таким подвижным частям кузова, как задняя дверь, боковая двери, складной верх, капот двигателя или створка крышки наливной горловины топливного бака автомобиля.
Краткое описание чертежей
Ниже изобретение поясняется примерами на фиг.1-5, причем одни и те же компоненты с одинаковыми функциями имеют одинаковые условные обозначения. На чертежах, в описании и формуле изобретения раскрыты многочисленные признаки изобретения, используемые в комбинации. Исходя из целесообразности специалист будет рассматривать эти признаки и в отдельности, а также объединять их в другие рациональные комбинации. На чертежах показано:
на фиг.1 - схематическое изображение предлагаемого в изобретении устройства для управления положением подвижной части кузова автомобиля,
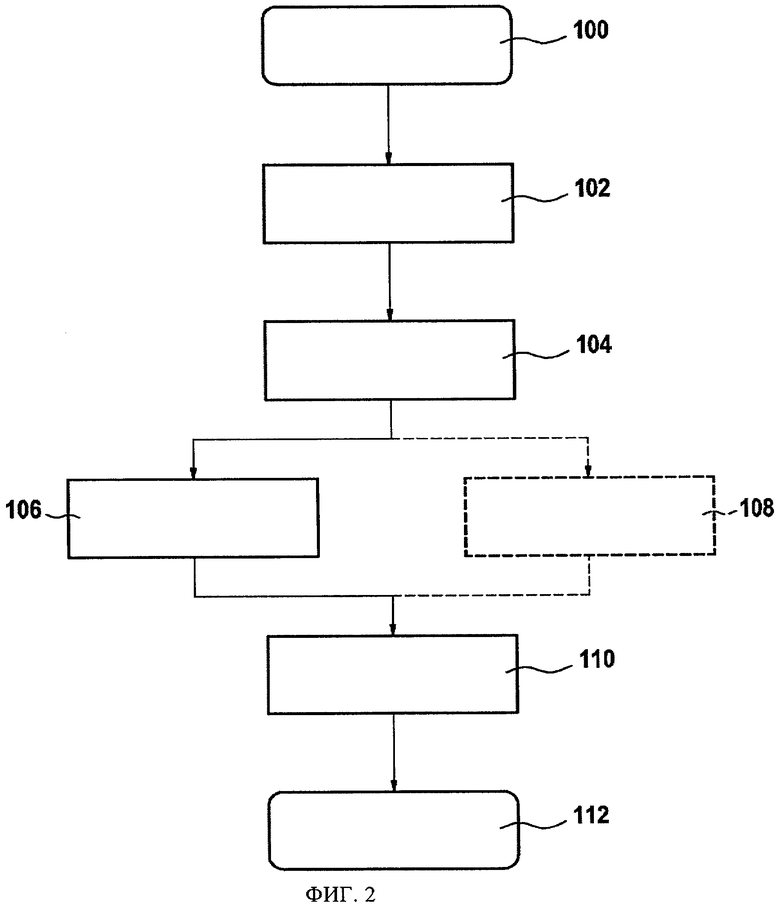
на фиг.2 - первая блок-схема предлагаемого в изобретении способа управления положением подвижной части кузова,
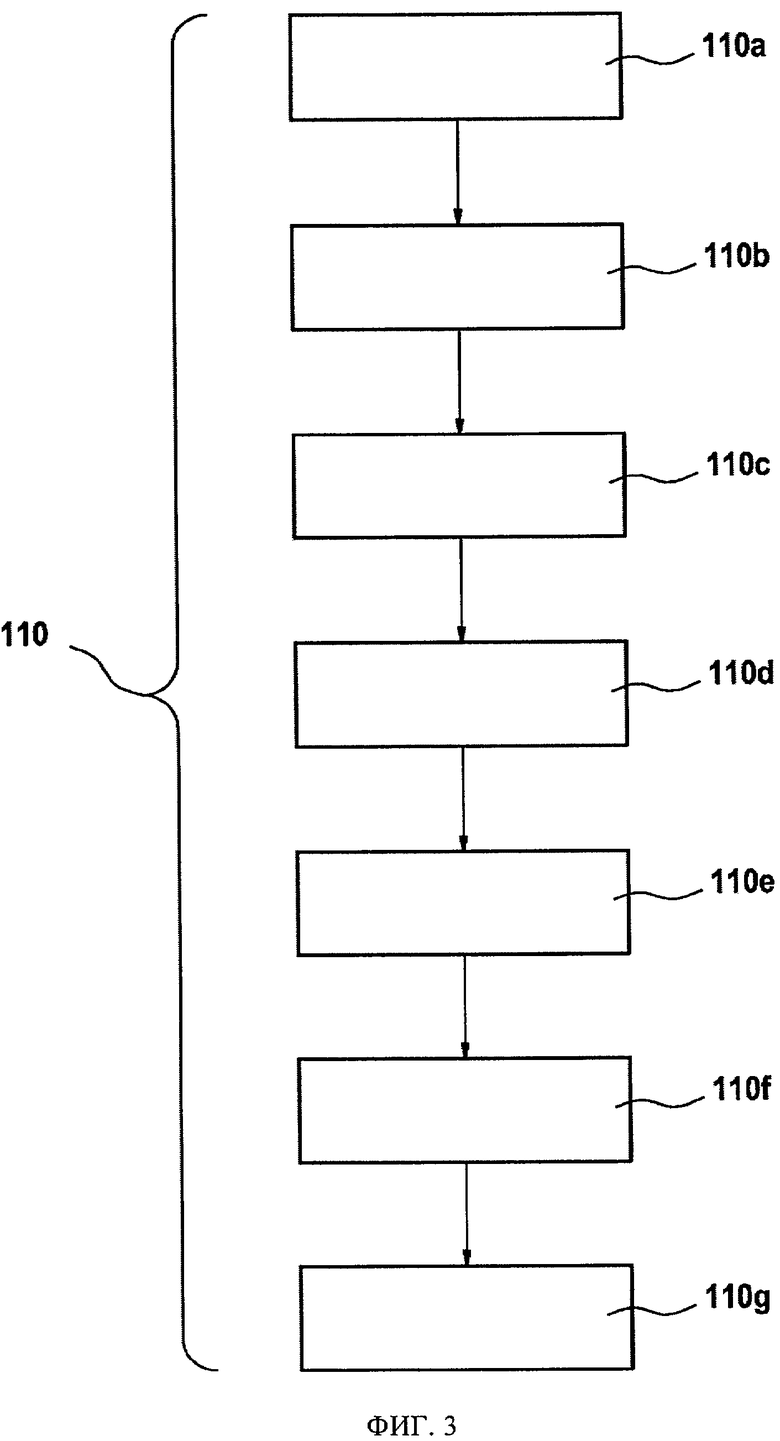
на фиг.3 - вторая блок-схема предлагаемого в изобретении способа управления положением подвижной части кузова,
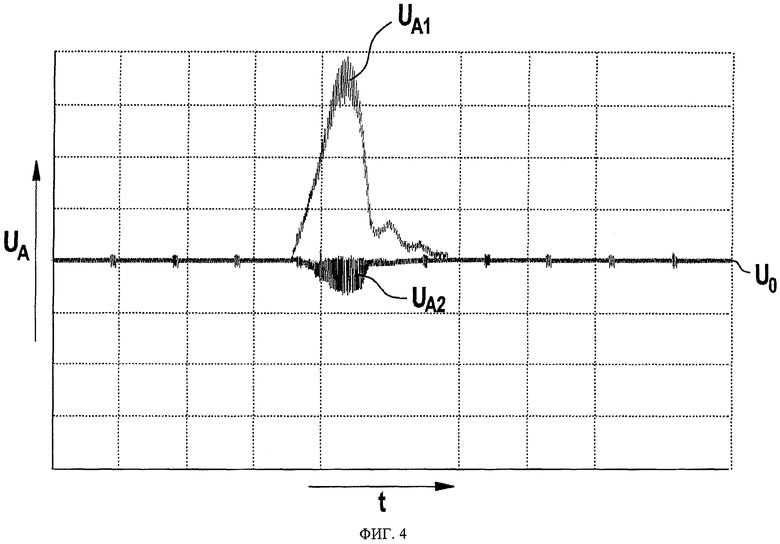
на фиг.4 - диаграмма изменения по времени импульса напряжения, измеренного на исполнительном механизма при перемещении подвижной части кузова вручную,
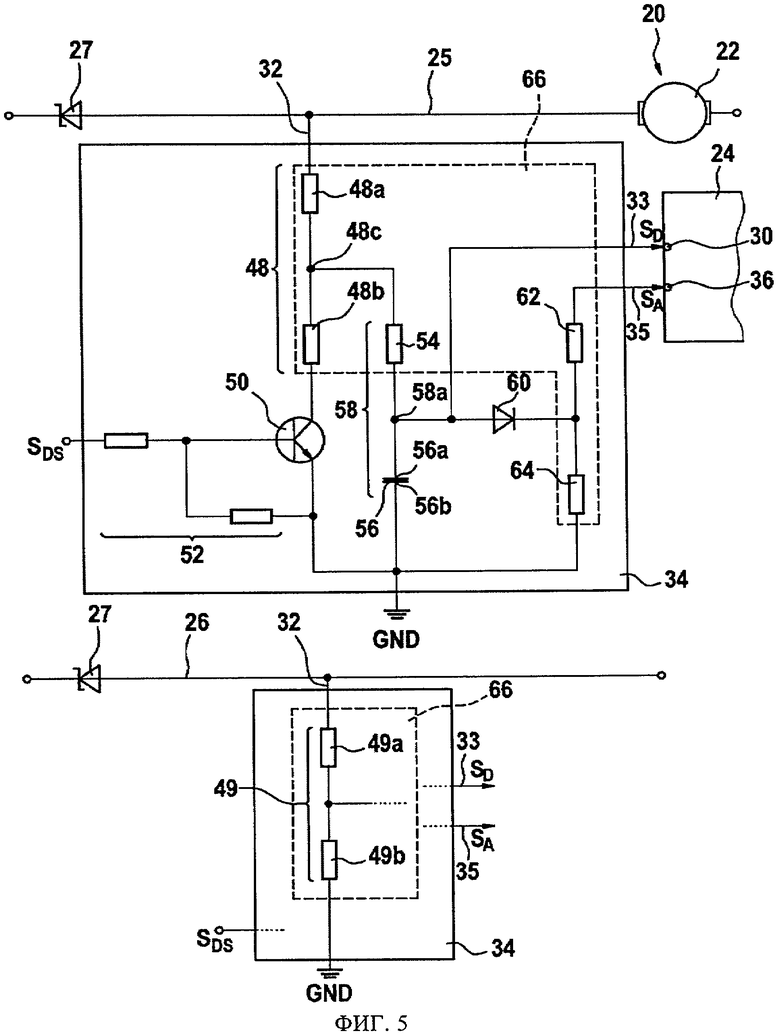
на фиг.5 - блок-схема диагностической ветви исполнительного механизма для генерирования активизирующего сигнала.
Осуществление изобретения
На фиг.1 показано схематическое изображение предлагаемого в изобретении устройства 10 для управления положением подвижной части 12 кузова автомобиля 14 на примере задней двери 16 и задней боковой двери 18. Исполнительный механизм для перемещения подвижной части 12 кузова имеет обозначение 20 и может крепиться на кузове автомобиля 14 или на подвижной части 12 кузова. Исполнительный механизм 20 в представленном примере выполнен в виде электродвигателя 22. Однако можно использовать и другие пригодные в рамках изобретения исполнительные механизмы 20, например газонаполненные амортизаторы (газонаполненные упоры) или подобные им устройства. Подвижными частями 12 кузова наряду с показанными здесь задней дверью 16 и задней боковой дверью 18 могут быть также другие двери автомобиля 14, капот двигателя, складной верх, створка крышки наливной горловины топливного бака и иные аналогичные детали.
Для управления электродвигателем 22 служит блок 24 управления, например, микропроцессор, специализированная интегральная схема или соответствующая дискретная или интегральная переключательная схема. С этой целью в блок 24 управления, к которому приложено напряжение питания U+ и электрический потенциал массы GND, подается соответствующий управляющий сигнала SS от не показанного на чертеже датчика сигналов, предпочтительно расположенного за пределами устройства 10. Датчик может быть выполнен, например, как радиоприемник дистанционного радиоуправления автомобилем 14 или как расположенное внутри автомобиля 14 средство переключения или манипуляции. Вместе с тем, возможно также встраивание радиоприемника непосредственно в устройство 10 или даже в блок 24 управления.
Для упрощения на фиг.1 не показано соединение на массу электродвигателя 22. Соединение можно реализовать, например, посредством полумоста, устанавливаемого между блоком 24 управления и электродвигателем 22. С помощью двух ветвей управления 25 и 26, в каждой из которых для стабилизации напряжения установлен диод Зенера, можно запускать электродвигатель 22 в двух различных направлениях для открытия или закрытия подвижной части 12 кузова. При этом переключение направления движения осуществляется путем реверсирования полярности посредством реле 28, расположенного в ветви управления 26. Возможно также без ограничения предмета изобретения, чтобы ветвь управления 25 содержала реле 28 или чтобы в обеих ветвях управления 25 и 26 имелось соответствующее реле.
Блок 24 управления имеет диагностический интерфейс 30 для диагностики электродвигателя 22 посредством соответствующих диагностических ветвей 32 в рабочем состоянии. При этом возможно, чтобы, как показано на фиг.1, все контакты электродвигателя 22 или ветвей управления 25, 26 имели диагностическую ветвь 32 или чтобы контролировалось только подмножество контактов. Диагностические ветви 32 переключательными схемами 34, о которых будет подробнее сказано в связи с фиг.5, и соответствующими диагностическими линиями соединены с диагностическим интерфейсом 30 блока 24 управления. В качестве альтернативы, для каждой диагностической ветви 32 может быть предусмотрен собственный диагностический интерфейс 30 в блоке 24 управления. Диагностические ветви 32 в состоянии покоя блока 24 управления служат также, как будет показано в связи с фиг.2-5, для активизации блока 24 управления посредством активизирующего сигнала SA. Для этого они переключательными схемами 34 и соответствующими активизирующими линиями 35 соединены с активизирующим интерфейсом 36 блока 24 управления, активным в состоянии покоя и неактивным в рабочем состоянии. Как к диагностическому интерфейсу 30, так и к активизирующему интерфейсу 36 относится, что они могут быть предусмотрены для каждой ветви управления 25, 26 или контакта электродвигателя 22. Если обе ветви управления 25 и 26 переключательной схемой 34 соединены с активизирующим интерфейсом 36, то этим обеспечивается активизация блока 24 управления путем перемещения подвижной части 12 кузова вручную в обоих направлениях. Далее возможно, чтобы диагностический интерфейс 30 и активизирующий интерфейс 36 были объединены в общем интерфейсе (на фиг.1 не показан). В этом случае общий интерфейс работает в состоянии покоя блока 24 управления как активизирующий интерфейс, а в рабочем состоянии блока 24 управления как диагностический интерфейс.
Для регистрации положения подвижной части 12 кузова служит детектор 37 положения, выполненный в данном случае в виде датчика Холла и встроенный в электродвигатель 22. Не показанный на схеме магнитный диск, установленный на валу ротора электродвигателя 22 с фиксацией от проворачивания, позволяет простым и известным способом регистрировать положение ротора, а значит и подвижной части 12 кузова. Можно использовать также и другие датчики, в частности анизотропные магниторезистивные датчики или подобные им. Кроме того, вместо датчика Холла 38 для регистрации положения подвижной части 12 кузова возможно использование потенциометра 40, взаимодействующего с валом ротора электродвигателя 22 или с самой подвижной частью 12 кузова. В случае взаимодействия с подвижной частью 12 кузова потенциометр 40 мог бы быть выполнен, в частности, как ползунковый реостат. Вместо потенциометра 40 можно использовать также линейный или другой аналогичный датчик. Еще одной альтернативой является регистрация положения подвижной части кузова без использования детекторов или датчиков путем анализа по методу счета со сквозным переносом остаточной волнистости переключательного сигнала SC, управляющего коммутационным устройством электродвигателя 22, посредством блока 24 управления. В дальнейшем без ограничения предмета изобретения будем исходить из применения датчика Холла 38. Сигнал положения Sp передается в блок 24 управления для сохранения в памяти 42 фактического положения подвижной части 12 кузова. Соответствующий подход можно перенести на уже упоминавшиеся альтернативы применения датчика Холла 38.
Блок-схемы на фиг.2 и 3 поясняют сущность предлагаемого в изобретении способа управления положением подвижной части 12 кузова. Рабочее состояние устройства 10, в котором возможно как перемещение подвижной части 12 кузова вручную, так и автоматическое перемещение подвижной части 12 кузова в режиме дистанционного управления или посредством размещенного в автомобиле 14 средства переключения или манипуляции имеет обозначение 100. При этом под перемещением вручную следует понимать, например, перемещение от руки, а под автоматическим - перемещение посредством исполнительного механизма 20. На первом шаге 102 включают дистанционное управление или средство переключения или манипуляции, под действием которого подвижная часть 12 кузова в зависимости от управляющего сигнала SS перемещается в направлении закрытого или открытого положения. При этом диагностические ветви 32 и диагностический интерфейс 30 блока 24 управления, позволяют контролировать исполнительный механизм 20 с помощью сигнала диагностики SD. Кроме того, получающий электропитание блок 24 управления регистрирует положение подвижной части 12 кузова с помощью детектора 37 положения или, как описано выше, посредством схемы, не использующей детекторы и датчики. На следующем шаге 104 подвижную часть 12 кузова останавливают в произвольном положении и зарегистрированное посредством детектора 37 положение как сигнал положения Sp записывают в память 42 блока 24 управления. Однако сохранение в памяти сигнала положения Sp непосредственно после каждой остановки подвижной части 12 кузова в принципе не обязательно.
Если в течение определенного промежутка времени, например 30 секунд, после последнего перемещения, не произойдет повторное перемещение вручную или автоматическое перемещение подвижной части 12 кузова, то на шаге 106 устройство 10 или блок 24 управления будет переведен в состояние покоя, ожидания или экономии энергии и зарегистрированное фактическое положение подвижной части 12 кузова будет сохранено в памяти 42 блока 24 управления как сигнал положения Sp. При этом отключается диагностический интерфейс 30 и подключается активизирующий интерфейс 36. Поскольку в связи с этим значительно снижается или полностью прерывается электропитание блока 24 управления, детектора 37 положения и электродвигателя 22, устанавливается очень малый ток в состоянии покоя. Это весьма существенно, в частности в современных автомобилях, так как возрастающее число потребителей электроэнергии делает необходимой продуманную концепцию управления током в состоянии покоя, чтобы минимизировать или исключить нагрузку на аккумулятор автомобиля в выключенном состоянии автомобиля 14, а также связанную с этим опасность глубокой разрядки аккумулятора. Если предусмотрено управление исполнительным механизмом 20 по шине, например CAN- или LIN-шине в автомобиле 14, то, в качестве альтернативы, устройство 10 можно выводить из состояния покоя посредством шины данных на шаге, обозначенном блоком 108, выполненным штриховой линией.
Перемещение подвижной части 12 кузова вручную на шаге 110 приводит к тому, что электродвигатель 22 работает в режиме генератора, который вследствие возникающей в результате противоэлектродвижущей силы генерирует импульс напряжения и/или тока. Пример зависимости импульса напряжения UA от времени t показан на фиг.4 для перемещения подвижной части 12 кузова вручную в направлении более широко открытого состояния (импульс напряжения UA1) и в направлении более плотно закрытого состояния (импульс напряжения UA2), причем исходящая из базового значения Uo положительная или отрицательная ориентация импульса напряжения UA зависит от направления вращения электродвигателя 22. Импульс напряжения UA через диагностические ветви 32 соответствующих ветвей управления 25, 26 для открытия или закрытия подвижной части 12 кузова, переключательные схемы 34 и активизирующие линии 35 как активизирующий сигнал SA воздействует на активизирующие интерфейсы 36 блока 24 управления (см. фиг.1). После этого устройство 10 на шаге 112 снова переводится из состояния покоя в рабочее состояние. Альтернативно также возможно, чтобы работающий как детектор 37 положения потенциометр 40 выполнял задачу активизирующего средства 44. При этом перемещение подвижной части 12 кузова вызывает изменение омического сопротивления потенциометра 40, а следовательно, и изменение напряжения и/или тока, которое при превышении определенного порогового значения служит в качестве активизирующего сигнала SA для блока 24 управления. От точного описания топологии схемы с использованием потенциометра 40 можно здесь отказаться, так как использование потенциометра 40, например, в рассчитанном соответствующим образом делителе напряжения известно. В этом случае можно также использовать активизирующий интерфейс 36 в качестве входа для активизирующего сигнала SA. Вместе с тем, как уже пояснялось выше, возможно и применение общего интерфейса блока 24 управления для диагностики и активизации.
Точное описание фазы активизации, а также коррекции сохраненного в памяти положения подвижной части 12 кузова на шаге 110 приведено далее в связи с фиг.3. Перемещение подвижной части 12 кузова вручную на шаге 110а создает на шаге 110b уже упоминавшийся импульс напряжения и/или тока в электродвигателе 22, как показано на фиг.4. Этот импульс действует как активизирующий сигнал SA через диагностические ветви 32 на активизирующий интерфейс 36 блока 24 управления. С учетом приведенного выше описания возможно также, чтобы вместо исполнительного механизма активизирующий сигнал SA создавали служащий в качестве активизирующего средства 44 потенциометр 40 или датчик Холла 38.
На шаге 110с блок 24 управления под действием активизирующего сигнала SA переходит из состояния покоя в рабочее состояние и получает электропитание. После этого он на шаге 110d снова считывает сохраненное в его памяти до перевода в состояние покоя положение подвижной части 12 кузова. Таким образом, промежуток времени, затраченного на выполнение шагов 110а-110d, определяет фазу активизации блока 24 управления.
На шаге 110е блок 24 управления обеспечивает электропитание детектора 37 положения, выполненного как датчик Холла 38 или потенциометр 40, для повторной регистрации фактического положения подвижной части 12 кузова на шаге 110f. Если же потенциометр 40 дополнительно работает как активизирующее средство 44, то подача напряжения питания U+ не требуется, так как оно и без того должно быть постоянно приложено для генерирования активизирующего сигнала SA. В этом случае можно обойтись без шага 110е. То же относится к случаю, когда датчик Холла 38 наряду со своей функцией детектора 37 положения служит также для генерирования активизирующего сигнала SA.
После регистрации фактического положения на шаге 110f посредством детектора 37 положения на шаге 110g осуществляется актуализация фактического положения, сохраненного в памяти блока 24 управления. Благодаря этому устройство 10 работает с правильными данными. Тем не менее, вследствие кратковременного перемещения подвижной части 12 кузова в состоянии покоя или в фазе активизации блока 24 управления возможно появление неточного сигнала положения Sp, так как фактическое положение подвижной части 12 кузова и сохраненное в памяти 42 положение могут отличаться друг от друга. Поэтому блок 24 управления имеет средства 46 коррекции, позволяющие корректировать положение подвижной части 12 кузова, изменившееся в фазе активизации при переходе из состояния покоя в рабочее состояние. Средства 46 коррекции могут быть реализованы, например, в форме сохраненного в блоке 24 управления алгоритма или поисковой таблицы, причем поправочное значение зависит от определенной противоэлектродвижущей силы электродвигателя 22. В качестве другого поправочного значения в этой связи может служить зарегистрированная крутизна изменения противоэлектродвижущей силы, являющаяся мерой воздействия силы на подвижную часть 12 кузова при ее перемещении вручную. Возможно также определение среднего числа тактовых импульсов детектора 37 положения в фазе активизации и сохранение его как поправочного значения в памяти 42 блока 24 управления, чтобы скорректировать первоначально записанный сигнал положения Sp в зависимости от направления перемещения подвижной части 12 кузова. При этом можно детектировать направление перемещения, как показано на фиг.4, по созданному электродвигателем 22 импульсу напряжения и/или тока.
После возможной коррекции считанного из памяти 42 положения выполнение способа на шаге 110 заканчивается и осуществляется переход к шагу 112 согласно фиг.2. Теперь устройство 10 снова перешло в обычное рабочее состояние и позволяет вручную или автоматически перемещать подвижную часть 12 кузова. Диагностический интерфейс 30 в это время находится в активизированном состоянии, а активизирующий интерфейс 36 - в выключенном состоянии. Дополнительно можно предусмотреть, чтобы блок 24 управления в определенные моменты времени в конечных положениях подвижной части кузова, т.е. в полностью открытом или закрытом состоянии, выполнял операцию калибровки, чтобы эти абсолютные положения представляли собой контрольное значение (0% или 100%) для измеренных без помощи детектора или посредством детектора 37 положений. При этом частота операций калибровки зависит от конкретного случая применения, т.е. от того, какую подвижную часть 12 кузова перемещают, и/или от требуемой точности операций перемещения и активизации. Следовательно, чем выше требования к точности, тем чаще следует производить калибровку. Далее целесообразно производить калибровку после каждого перезапуска блока 24 управления или устройства 10, например, вследствие прерывания или уменьшения напряжения аккумулятора. При этом своевременное обнаружение уменьшения напряжения батареи может осуществляться путем контроля не показанного на схеме регулятора напряжения или подобного ему устройства, причем соответствующий выданный сигнал запускает операцию калибровки. В сочетании с выполненной новой калибровкой функциональность устройства 10 может быть ограничена таким образом, чтобы непосредственно после новой калибровки было невозможным автоматическое перемещение подвижной части 12 кузова с помощью исполнительного механизма 20. Однако возможно исключение из этого правила при использовании не показанных на схеме датчиков защиты от защемления подвижной частью 12 кузова, позволяющих повышать безопасность автоматического перемещения, несмотря на отсутствие калибровки. Далее возможно определение максимального числа разрешенных операций перемещения, при достижении которого необходимо выполнять калибровку. Например, можно предусмотреть, чтобы подвижная часть 12 кузова автоматически подвергалась калибровке после каждой сотой или двухсотой операции перемещения при следующем полном открытии и/или закрытии. Калибровку можно осуществлять также после каждого полного открытия или закрытия вручную, причем соответственно установленный датчик генерирует сигнал конечного положения и передает его в блок 24 управления.
На фиг.5 показана часть одной из представленных на фиг.1 переключательных схем 34 для диагностики электродвигателя 22 или для активизации блока 24 управления посредством управляющей ветви 25. При этом предпочтительно одна переключательная схема 34 соединена с управляющими ветвями 25 и 26, чтобы обеспечить активизацию в обоих направлениях перемещения подвижной части 12 кузова. Далее каждая переключательная схема 34 диагностической линией 33 соединена с диагностическим интерфейсом 30 и активизирующей линией 35 - с активизирующим интерфейсом 36 блока 24 управления для передачи диагностического сигнала SD в рабочем состоянии или активизирующего сигнала SA в состоянии покоя.
Переключательные схемы 34 снабжены первым делителем напряжения 48, 49, который, с одной стороны, подключен к управляющей ветви 25, 26 между анодом диода Зенера 27 и контактом электродвигателя 22, работающего как исполнительный механизм 20, а с другой стороны, коммутационным средством 50 может быть соединен на электрический потенциал массы GND. Для этой цели средство переключения 50, выполненное, например, как биполярный транзистор, полевой транзистор, реле или тому подобный элемент, может по диагностическому коммутационному сигналу SDS активизироваться или отключаться вторым делителем напряжения 52. При этом диагностическим коммутационным сигналом может быть, например, постоянное напряжение около 5 В, генерируемое расположенным за пределами устройства 10 устройством управления или самим блоком 24 управления.
Соединенная с управляющей ветвью 26 переключательная схема 34 для большей наглядности представлена лишь частями. Ее конструкция по существу соответствует конструкции переключательной схемы 34, соединенной с управляющей ветвью 25. В случае, если активизация блока 24 управления требуется только в одном направлении движения или если необходимо контролировать только одну из управляющих ветвей 25, 26, переключательные схемы 34 могут вполне отличаться друг от друга, если, например, отказаться от активизирующей линии 35 или от диагностической линии 33, а также от связанных с ними компонентов. Ниже поясняются принцип работы и конструкция переключательных схем 34 на примере переключательной схемы 34, соединенной с управляющей ветвью 25. Между двумя сопротивлениями 48а и 48b первого делителя напряжения 48 предусмотрено ответвление 48с от средней точки образованного сопротивлением 54 и конденсатором 56 резистивно-емкостного звена 58, причем первый контакт 56а конденсатора 56 ответвлением 58а от средней точки резистивно-емкостного звена 58 соединен с анодом диода 60, а второй контакт 56b конденсатора 56 - с электрическим потенциалом массы GND. Далее существует связь ответвления 58а от средней точки через диагностическую линию 33 с диагностическим входом 30 блока 24 управления для передачи диагностического сигнала SD в рабочем состоянии блока 24 управления при активизированном или низкоомном коммутационном средстве 50. Наконец, катод диода 60 посредством сопротивления 62 и активизирующей линии 35 соединен с активизирующим интерфейсом 36 блока 24 управления для передачи активизирующего сигнала SA в состоянии покоя, а посредством другого сопротивления 64 - с электрическим потенциалом массы. GND.
В рабочем состоянии блока 24 управления коммутационное средство 50 активизировано диагностическим коммутационным сигналом SDS, поэтому второе сопротивление 48b первого делителя напряжения 48 соединено с электрическим потенциалом массы GND. В этом случае вследствие прохождения тока через первое сопротивление 48а первого делителя напряжения 48, сопротивление 54 резистивно-емкостного звена 58 и диагностическую линию 33 возможна однозначная диагностика электродвигателя 22 блоком 24 управления.
В состоянии покоя блока 24 управления его диагностический интерфейс 30 отключен, поэтому ток может воздействовать только на активизирующий интерфейс 36. Однако из-за повышенной окружающей температуры (например, 80°С) при непосредственном соединении на массу первого делителя напряжения 48 может возникать ток утечки через диод Зенера 27, который сопровождается непреднамеренной активизацией блока 24 управления активизирующим интерфейсом 36. Соответствующий ток утечки может вызывать также не показанная здесь помехоподавляющая схема, соединенная с электродвигателем 22. Во избежание подобных токов утечки коммутационное средство 50 отключают посредством обнуления диагностического коммутационного сигнала SDS, чтобы отсоединить первый делитель напряжения 48 от электрического потенциала массы GND. Если конденсатор 56 резистивно-емкостного звена 58 заряжен, то через него также отсутствует соединение на электрический потенциал массы GND. Поскольку блок 24 управления находится в состоянии покоя, диагностический интерфейс 30 не выполняет диагностику электродвигателя 22.
В приведенном ниже примере исходят из типичного для управления задней дверью тока утечки около 200 мкА при 80°С. Он соответствует максимальному току в состоянии покоя для электрооборудования автомобилей и для области температур от -40 до +85°С, причем регулирование осуществляется, например, посредством первого делителя напряжения 49 соединенной с управляющей ветвью 26 переключательной схемой 34. Если исходить из того, что этот первый делитель напряжения 49 имеет два сопротивления 49а и 49b величиной, соответственно, 6,8 кОм и 1 кОм, причем сопротивление 1 кОм можно соединять на электрический потенциал массы GND, то вследствие тока утечки 200 мкА возникает падение напряжения на электродвигателе 22 величиной 1,56 В, которое падает также в соединенной с управляющей ветвью 25 переключательной схеме 34. Хотя переключательные схемы 34 в данном случае имеют преимущественно одинаковую конструкцию, однако их компоненты рассчитаны не одинаково.
Если, например, исходить из того, что первое сопротивление 48а и второе сопротивление 48b соединенной с управляющей ветвью 25 переключательной схемы 34 имеют величины, соответственно, 47 кОм и 27 кОм и что второе сопротивление 48b первого делителя напряжения 48 вследствие отключения коммутационного средства 50, а также рассчитанное на 27 кОм сопротивление 54 резистивно-емкостного звена 58 вследствие заряда конденсатора 56 не имеют соединения на электрический потенциал массы GND, то через рассчитанное на 1 МОм сопротивление 64 с учетом того, что на диоде 60 падение напряжения пропускания составляет 0,6 В, то приложено напряжение 0,9 В. Поскольку сопротивление 62, соединенное по активизирующей линии 35 с активизирующим интерфейсом 36 блока 24 управления, имеет по сравнению с сопротивлением 64 величину 1,2 кОм, которой можно пренебречь, следовательно, и к активизирующему интерфейсу 36 приложено напряжение почти 0,9 В.
Активизирующий интерфейс 36 рассчитан таким образом, чтобы требовалось напряжение по меньшей мере 1 В для перевода блока 24 управления из состояния покоя в рабочее состояние. Если подвижную часть 12 кузова перемещают вручную, то электродвигатель 22 под действием противоэлектродвижущей силы работает в режиме генератора и генерирует импульс напряжения UA в соответствии с фиг.4. Под влиянием этого импульса напряжения UA напряжение около 0,9 В, приложенное к активизирующему интерфейсу 36, повышается за пределы 1 В, поэтому импульс напряжения UA в смысле активизирующего сигнала SA активизирует блок 24 управления. Соответствующая характеристика возможна также в том случае, если диагностический интерфейс 30 и активизирующий интерфейс 36 объединены в общем интерфейсе. В этом случае требуется только переключение функции общего интерфейса блоком 24 управления в зависимости от его состояния.
Сопротивления 48а, 48b, 54, 62 и 64 вместе образуют соединенную с диагностической ветвью 32 электродвигателя 22 резисторную схему 66, рассчитанную таким образом, чтобы вызываемое током утечки падение напряжения на активизирующем сопротивлении 36 не превышало заданного предельного значения 1 В для активизации блока 24 управления. Сопротивления 49а и 49b, а также другие не показанные на схеме сопротивления соединенной с управляющей ветвью 26 переключательной схемы 34 могут быть составной частью резисторной схемы 66. Это целесообразно постольку, поскольку сопротивления 49а и 49b позволяют, например, регулировать обусловленное током утечки падение напряжения на электродвигателе 22, которое представляет собой значительный сдвиг в сторону увеличения или уменьшения заданного предельного значения (в данном случае 1 В) для активизации блока 24 управления вследствие перемещения подвижной части 12 кузова вручную. Следовательно, соответствующие сопротивления обеих переключательных схем 34 могут образовывать резисторную схему 66 для точного регулирования процесса активизации. При этом упомянутые здесь величины сопротивления следует понимать не как ограничение, а лишь в качестве примера. Специалист в состоянии согласовать сопротивления с конкретными потребностями, например, в зависимости от предельного значения и/или тока утечки.
В заключение еще следует указать на то, что приведенные примеры осуществления изобретения не ограничиваются указанными на фиг.1-5 значениями сопротивления или напряжения. Использование диода Зенера 27 в управляющих ветвях 25, 26 также не следует понимать как ограничение сущности изобретения. Кроме того, возможно, чтобы переключательные схемы 34 и резисторной схемы 66 для каждой ветви управления были рассчитаны по-разному. О том, что эта мера вполне разумна, свидетельствует фиг.4, из которой следует, что противоэлектродвижущая сила может в значительной мере зависеть от направления перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДАЧИ ДВЕРИ И СПОСОБ ЕЕ РАБОТЫ | 2017 |
|
RU2704938C1 |
| Устройство для сборки и сварки кузовов легковых автомобилей | 1978 |
|
SU763056A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ГРУЗА | 2020 |
|
RU2799087C2 |
| КОРОБКА ПЕРЕДАЧ | 2002 |
|
RU2278793C2 |
| БЛОК УПРАВЛЕНИЯ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОЙ СЕКЦИЕЙ СВОИХ ФУНКЦИЙ ПРИ КРЕПЛЕНИИ ЛАВЫ В ГОРНОЙ ВЫРАБОТКЕ | 2008 |
|
RU2463451C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ УСТРОЙСТВА ЗАЩИТЫ | 1998 |
|
RU2223532C2 |
| ЭЛЕКТРИЧЕСКОЕ БЛОКИРУЮЩЕЕ УСТРОЙСТВО РУЛЕВОГО МЕХАНИЗМА, В ЧАСТНОСТИ, ДЛЯ АВТОМОБИЛЯ | 2007 |
|
RU2421351C2 |
| Клавишный выключатель | 1989 |
|
SU1830152A3 |
| БЛОК УПРАВЛЕНИЯ СИСТЕМЫ ЭЛЕКТРОБЛОКИРОВКИ ЗАМКОВ ДВЕРЕЙ | 1992 |
|
RU2067658C1 |
| МОДУЛЬ-КОНТЕЙНЕР ДЛЯ РАЗМЕЩЕНИЯ АНТЕННЫХ СИСТЕМ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 2009 |
|
RU2382447C1 |
Устройство (10) для управления положением подвижной части (12) кузова автомобиля включает в себя исполнительный механизм (20) для перемещения подвижной части (12) кузова и блок (24) управления для управления исполнительным механизмом (20) в рабочем состоянии. При отсутствии перемещения подвижной части (12) кузова в течение определенного промежутка времени блок (24) управления переходит из рабочего состояния в состояние покоя. Перемещением подвижной части (12) кузова вручную блок (24) управления снова переводится из состояния покоя в рабочее состояние. Также описан соответствующий способ управления положением подвижной части (12) кузова. Технический результат - снижение потребления тока, исключение дополнительного элемента для обнаружения перемещения подвижной части кузова и дополнительного средства переключения и/или дополнительного измерения тока, необходимых для обратного перевода блока управления из состояния ожидания в рабочее положение. 2 н. и 30 з.п. ф-лы, 5 ил.
1. Устройство (10) для управления положением подвижной части (12) кузова автомобиля, включающее в себя исполнительный механизм (20) для перемещения подвижной части (12) кузова и блок (24) управления для управления исполнительным механизмом (20) в рабочем состоянии, причем при отсутствии перемещения подвижной части (12) кузова в течение определенного промежутка времени блок (24) управления переходит из рабочего состояния в состояние покоя, а перемещением подвижной части (12) кузова вручную блок (24) управления снова переводится из состояния покоя в рабочее состояние, отличающееся тем, что блок (24) управления имеет средства (46) коррекции для коррекции положения перемещаемой части (12) кузова, изменившегося в фазе активизации при переходе из состояния покоя в рабочее состояние.
2. Устройство (10) по п.1, отличающееся тем, что перемещение подвижной части (12) кузова вручную генерирует в исполнительном механизме (20) импульс напряжения и/или тока (Up), который служит в качестве активизирующего сигнала (SA) для блока (24) управления.
3. Устройство (10) по п.1, отличающееся тем, что предусмотрено взаимодействующее с подвижной частью (12) кузова активизирующее средство (44), которое вследствие перемещения подвижной части (12) кузова вручную вызывает изменение напряжения и/или тока, служащее в качестве активизирующего сигнала (SA) для блока (24) управления.
4. Устройство (10) по п.3, отличающееся тем, что активизирующим средством (44) является потенциометр (40), в частности ползунковый реостат, и/или встроенный в исполнительный механизм (20) датчик Холла (38).
5. Устройство (10) по п.1, отличающееся тем, что в нем предусмотрен детектор (37) положения для регистрации фактического положения подвижной части (12) кузова в рабочем состоянии блока (24) управления.
6. Устройство (10) по п.1, отличающееся тем, что регистрация фактического положения подвижной части (12) кузова осуществляется без применения детекторов.
7. Устройство (10) по п.5 или 6, отличающееся тем, что блок (24) управления перед переводом из рабочего состояния в состояние покоя сохраняет в памяти (42) зарегистрированное фактическое положение подвижной части (12) кузова и после повторного перевода в рабочее состояние снова считывает его из памяти (42).
8. Устройство (10) по п.7, отличающееся тем, что блок (24) управления после повторного перевода блока (24) управления в рабочее состояние снова активизирует детектор (37) положения для регистрации положения подвижной части (12) кузова.
9. Устройство (10) по п.1, отличающееся тем, что фаза активизации блока управления включает в себя промежуток времени от перемещения подвижной части (12) кузова вручную до считывания из памяти (42) сохраненного в ней положения.
10. Устройство (10) по п.1, отличающееся тем, что блок (24) управления в определенные моменты времени в соответствующем конечном положении подвижной части (12) кузова выполняет операцию калибровки.
11. Устройство (10) по п.10, отличающееся тем, что частота операций калибровки зависит от требуемой точности операций активизации и перемещения.
12. Устройство (10) по п.1, отличающееся тем, что предусмотрены электрические средства (50, 66), предупреждающие непреднамеренную активизацию блока (24) управления вследствие тока утечки.
13. Устройство (10) по п.10, отличающееся тем, что электрические средства (50, 66) включают в себя по меньшей мере одно коммутационное средство (50), которое в состоянии покоя блока (24) управления отсоединяет диагностическую ветвь (32) исполнительного механизма (20) от электрического потенциала массы (GND).
14. Устройство (10) по п.10 или 11, отличающееся тем, что электрические средства (50, 66) включают в себя по меньшей мере одну соединенную с диагностической ветвью (32) исполнительного механизма (20) резисторную схему (66), рассчитанную таким образом, чтобы вызываемое током утечки падение напряжения не превышало заданного предельного значения для активизации блока (24) управления.
15. Устройство (10) по п.1, отличающееся тем, что подвижной частью (12) кузова автомобиля является задняя дверь (16), боковая дверь (18), складной верх, капот двигателя или створка крышки наливной горловины топливного бака.
16. Устройство (10) по п.1, отличающееся тем, что исполнительным механизмом (20) является электродвигатель (22), который для генерирования активизирующего сигнала (SA) работает в режиме генератора.
17. Устройство (10) по одному из пп.3-6, отличающееся тем, что детектор (37) положения представляет собой встроенный в исполнительный механизм (20) датчик Холла (38) и/или взаимодействующее с подвижной частью (12) кузова активизирующее средство (44).
18. Способ управления положением подвижной части (12) кузова автомобиля посредством исполнительного механизма (20), управляемого блоком (24) управления в рабочем состоянии, причем при отсутствии перемещения подвижной части (12) кузова в течение определенного промежутка времени блок (24) управления переводят из рабочего состояния в состояние покоя, а перемещением подвижной части (12) кузова вручную блок (24) управления снова переводят из состояния покоя в рабочее состояние, отличающийся тем, что положение подвижной части (12) кузова, изменившееся в фазе активизации блока (24) управления при переходе из состояния покоя в рабочее состояние, корректируют с помощью средства (46) коррекции блока (24) управления.
19. Способ по п.18, отличающийся тем, что при перемещении подвижной части (12) кузова вручную в исполнительном механизме (20) генерируется импульс напряжения и/или тока (UA), который служит в качестве активизирующего сигнала (SA) для блока (24) управления.
20. Способ по п.18, отличающийся тем, что предусмотрено взаимодействующее с подвижной частью (12) кузова активизирующее средство (44), причем вследствие перемещения подвижной части (12) кузова вручную активизирующее средство (44) вызывает изменение напряжения и/или тока, которое служит в качестве активизирующего сигнала (SA) для блока (24) управления.
21. Способ по п.18, отличающийся тем, что фактическое положение подвижной части (12) кузова в рабочем состоянии блока (24) управления регистрируют детектором (37) положения, причем перед переводом блока (24) управления из рабочего состояния в состояние покоя зарегистрированное фактическое положение сохраняют в памяти (42) блока (24) управления, а после повторного перевода блока (24) управления в рабочее состояние - снова считывают из памяти (42) блока (24) управления.
22. Способ по п.21, отличающийся тем, что детектор (37) положения после повторного перевода блока (24) управления в рабочее состояние снова активизируется блоком (24) управления для регистрации положения подвижной части (12) кузова.
23. Способ по одному из пп.18-20, отличающийся тем, что фактическое положение подвижной части (12) кузова регистрируют без применения детекторов.
24. Способ по п.18, отличающийся тем, что фаза активизации блока (24) управления включает в себя промежуток времени от перемещения подвижной части (12) кузова вручную до считывания сохраненного в памяти (42) положения.
25. Способ по п.18, отличающийся тем, что в определенные моменты времени в соответствующем конечном положении подвижной части (12) кузова выполняют операцию калибровки.
26. Способ по п.25, отличающийся тем, что частота операций калибровки зависит от требуемой точности операций активизации и перемещения.
27. Способ по п.18, отличающийся тем, что с помощью электрических средств (50, 66) предупреждают непреднамеренную активизацию блока (24) управления вследствие тока утечки.
28. Способ по п.27, отличающийся тем, что электрические средства (50, 66) включают в себя по меньше мере одно коммутационное средство (50), причем в состоянии покоя блока (24) управления отсоединяют диагностическую ветвь (32) исполнительного механизма (20) от электрического потенциала массы (GND).
29. Способ по п.27 или 28, отличающийся тем, что электрические средства (50, 66) включают в себя по меньше мере одну резисторную схему (66) в диагностической ветви (32) исполнительного механизма (20), рассчитанную таким образом, чтобы вызываемое током утечки падение напряжения не превышало заданного предельного значения для активизации блока (24) управления.
30. Способ по п.18, отличающийся тем, что подвижной частью (12) кузова автомобиля является задняя дверь (16), боковая дверь (18), складной верх, капот двигателя или створка крышки наливной горловины топливного бака.
31. Способ по п.18, отличающийся тем, что исполнительный механизм (20) представляет собой электродвигатель (22), который для генерирования активизирующего сигнала (SA) работает в режиме генератора.
32. Способ по п.18, отличающийся тем, что детектор (37) положения представляет собой встроенный в исполнительный механизм (20) датчик Холла (38) или взаимодействующий с подвижной частью (12) кузова потенциометр (40).
| Способ нанесения покрытий из сплавов на основе рутения | 1974 |
|
SU625625A3 |
| DE 19639974 A1, 12.06.1997 | |||
| US 4952080 A, 28.08.1990 | |||
| US 4915075 A, 10.04.1990 | |||
| JP 2005016252 A, 20.01.2005 | |||
| JP 2005194767 A, 21.07.2005. | |||

