Группа изобретений относится к области вооружения и военной техники, в частности, к выверке - согласованию оптических осей прицела и оружия комплекса вооружения боевых машин (БМ) типа танков, БМП, БТР, БМД и т.п.
В качестве прототипа способа согласования оптических осей прицелов и оружия комплекса вооружения боевых машин выбран способ согласования оптической оси прицела БПК-2-42 и оси оружия (2А42) и контроля согласования для комплекса вооружения БМ («Боевая машина пехоты БМП-2. Техническое описание и инструкция по эксплуатации. Часть 1», Военное издательство Министерства обороны СССР, Москва, 1987 г., стр. 110), включающий расположение БМ на горизонтальной площадке, установку выверочного мишенного щита (контрольной мишени) на соответствующей ему контрольной дальности так, чтобы установочная линия на мишени была параллельна горизонтальной линии прицела наводчика (ПН), совмещение прицельной марки (перекрестия) ПН с соответствующей ему маркой на мишени, установку трубки холодной пристрелки (ТХП) в ствол или пусковую установку и их наведение на соответствующую данному оружию марку на контрольной мишени.
В качестве прототипа системы для осуществления данного способа выбрана система согласования оптических осей прицелов и оружия комплекса вооружения БМ, описанная там же («Боевая машина пехоты БМП-2. Техническое описание и инструкция по эксплуатации. Часть 1», Военное издательство Министерства обороны СССР, Москва, 1987 г., стр. 85). Данная система содержит ПН, оружие с установленной в стволе трубкой холодной пристрелки (ТХП) и контрольную мишень.
Недостатком данного способа и реализующей его системы является значительное время, затрачиваемое экипажем на выполнение подготовительных операций, связанных с выходом экипажа из машины (установка ТХП в канал ствола, установка мишени). Кроме того, проверка одним из членов экипажа согласования путем наблюдения через окуляр ТХП является травмоопасной операцией.
В прототипе процесс регулирования выверок - согласования (пошаговой подборки и фиксации) оптической оси прицела и геометрической оси канала ствола (пусковой установки (ПУ)) осуществляется механически, т.е. путем регулирования (подкручивания) системы болтов и гаек, отдельно по вертикальному и горизонтальному каналам.
В частности, совмещение перекрестия прицел-прибора и перекрестия ТХП с соответствующими отметками на мишени рекомендуется по горизонту производить поворотом корпуса прицел-прибора с помощью регулировочного винта, а по вертикали - поворотом направляющей с помощью гайки выверочного механизма.
Также в комплексах вооружения современных образцов легкобронированной техники требуется произвести выверку двух прицелов: прицела наводчика и прицела командира (ПК), причем в каждом прицеле -помимо оптического визирного может быть нескольких каналов технического зрения - телевизионного (широкого и узкого полей зрения), тепловизионного, информационного, что увеличивает время на проверочные работы.
Способ, описанный в прототипе, не позволяет обеспечивать дистанционное наведение вооружения, что является серьезным недостатком при существующей тенденции перехода на безэкипажные боевые модули.
Кроме того, в нем не учитывается необходимость постоянной корректировки (изменения) смещения ствола оружия (ПУ) относительно оптических осей каналов прицелов наводчика и командира при изменении дальности. Это особенно важно в современных условиях возрастания доли боевых задач при стрельбе с подвижного носителя, по подвижным целям.
Задача, на решение которой направлена группа изобретений, заключается в повышении эксплуатационных характеристик комплекса вооружения за счет уменьшения времени подготовки к стрельбе и, как следствие, более раннего открытия огня по выбранной цели с обеспечением требуемой точности прицеливания, в сокращении времени согласования прицельных устройств за счет автоматизации процесса контроля согласования, создании предпосылок для обеспечения дистанционного управления вооружением, снижение травмоопасных ситуаций, связанных, в частности, с наблюдением одним из членов экипажа через окуляр ТХП.
Автоматизация процесса контроля согласования позволяет сократить продолжительность подготовительных операций, связанных с выходом экипажа из машины, в частности с установкой ТХП в канал ствола или пусковой установки.
Поставленная задача решается способом согласования оптических осей прицелов и оружия комплекса вооружения БМ, включающем расположение БМ на горизонтальной площадке, установку контрольной мишени на соответствующей дальности таким образом, чтобы установочная линия на этой мишени была параллельна горизонтальной линии ПН, совмещение прицельной марки ПН с соответствующей ему маркой на мишени, установку ТХП в ствол оружия или пусковую установку и их наведение на соответствующую данному оружию марку на контрольной мишени, новым является то, что совмещение прицельной марки ПН осуществляют также и по удаленной точке, находящейся на предварительно измеренном расстоянии (дальности сведения), а совмещение прицельной марки ПН осуществляют по изображению на видеомониторе наводчика (ВМ-Н) с помощью органа управления наводчика, при этом оружие должно находиться в режиме слежения за ПН, а ПК - в режиме слежения за оружием, с помощью системы наведения вооружения (СНВ) последовательными отклонениями многофункционального переключателя (МФП) наводчика добиваются совмещения перекрестия ТХП с центром соответствующей марки на мишени или по удаленной точке и сохраняют полученные параметры в бортовом вычислителе (БВ), повторяют данную последовательность действий для каждого вида оружия комплекса вооружения, далее осуществляют согласование положения ПК и оружия путем перемещения оружия с использованием МФП командира и контролируя наведение по изображению на видеомодуле командира (ВМ-К), затем переводят ПН в режим слежения за ПК и, удерживая с помощью органа управления командира прицельную марку ПК на соответствующей марке на мишени или удаленной точке, последовательными отклонениями МФП наводчика добиваются точного совмещения прицельной марки ПН с соответствующей маркой на мишени, сохраняют параметры в БВ, далее переводят ПК в режим слежения за положением ПН и, удерживая с помощью органа управления наводчика марку ПН на соответствующей марке на мишени, последовательными отклонениями МФП командира добиваются совмещения прицельной марки ПК с соответствующей маркой на мишени, сохраняют параметры в БВ, причем во время стрельбы артвооружения постоянно пересчитывают в БВ значения угловых рассогласований с учетом введенных до стрельбы дальностей сведения оружия, а также измеряемой при стрельбе текущей дальности, геометрического смещения прицела относительно оружия (параллаксов), длины ствола и угла его подъема относительно линии визирования, далее в процессе работы комплекса осуществляют периодически контроль взаимного положения прицелов и оружия с помощью ПК по изображению на ВМ-К.
Поставленная задача решается системой согласования оптических осей прицелов и оружия комплекса вооружения БМ, содержащей ПН, оружие с установленной в стволе ТХП, контрольную мишень, при этом новым является то, что в нее дополнительно введены СНВ, подключенная к выходу ПН последовательно с оружием, содержащая в том числе первый сумматор (СУМ1), далее ПК, содержащий в том числе второй сумматор (СУМ2), также введен БВ, причем первый и второй выходы БВ соединены соответственно с первыми входами СУМ1 и СУМ2, а вторые входы СУМ1 и СУМ2 замкнуты отрицательной обратной связью с выходами соответственно оружия и ПК, а ко входу БВ дополнительно подсоединены последовательно соединенные между собой введенные МФП командира, орган управления командира и ВМ-К, вход которого соединен с выходом ПК, кроме того, ко входу ПН дополнительно подсоединены последовательно соединенные между собой введенные МФП наводчика, орган управления наводчика и ВМ-Н, вход которого соединен с выходом ПН.
Также в качестве органов управления могут использоваться пульт управления наводчика (ПУН) или пульт управления командира (ПУК).
Именно организованные таким образом система управления огнем и блок управления автоматикой вооружения обеспечивают сокращение времени контроля выверки, снижение травмоопасных ситуаций, а в целом - автоматизацию процесса контроля выверки, создание предпосылок для перехода к дистанционному управлению вооружением.
Сопоставительный анализ с прототипом показывает, что заявляемая система управления огнем БМ отличается наличием новых операций, а именно:
1) согласование оси прицельного устройства и ствола (ПУ) может производиться не только по визирному каналу, но и с помощью каналов технического зрения, например телевизионного канала, с узким полем зрения. При этом наводчик наблюдает точность совмещения прицельной марки (перекрестия) ПН с соответствующей ему маркой на мишени на видеосмотровом устройстве (или видеомониторе) наводчика;
2) согласование может осуществляться не только по пристрелочному щиту, но и по выбранной удаленной точке, дальность до которой измеряется и заводится в БВ предварительно (дальность сведения). Причем во время стрельбы артвооружения постоянно пересчитывают в БВ значения угловых рассогласований с учетом введенных до стрельбы дальностей сведения оружия, геометрического смещения прицела относительно оружия (параллаксов), длины ствола, а также измеряемых при стрельбе текущей дальности и угла подъема ствола относительно линии визирования;
3) наведение оружия производится дистанционно в автоматизированном режиме, с использованием реализованных в боевом модуле электрических связей, с использованием органов управления прицелов и оружия, например пульта управления наводчика (командира), а также СНВ;
4) второй прицел, в нашем случае - прицел командира, постоянно находится в режиме слежения за оружием и, если на выбранной дальности отслеживает с потребной точностью, то в БВ записываются (запоминаются) полученные для этой дальности значения рассогласований;
5) при наличии нескольких видов оружия в комплексе вооружения осуществляют согласование оптической оси прицела наводчика (командира) и геометрической оси ствола (пусковой), т.е. выверку, для каждого вида оружия комплекса вооружения;
6) отдельно производят согласование оптических осей ПН и ПК;
7) полученные значения параметров согласования прицелов и оружия, прицелов между собой записывают в энергонезависимую память бортового вычислителя;
8) в процессе функционирования комплекса вооружения БМ периодически осуществляют контроль рассогласования по щиту или по удаленной точке с помощью ПК по изображению на ВМ-К.
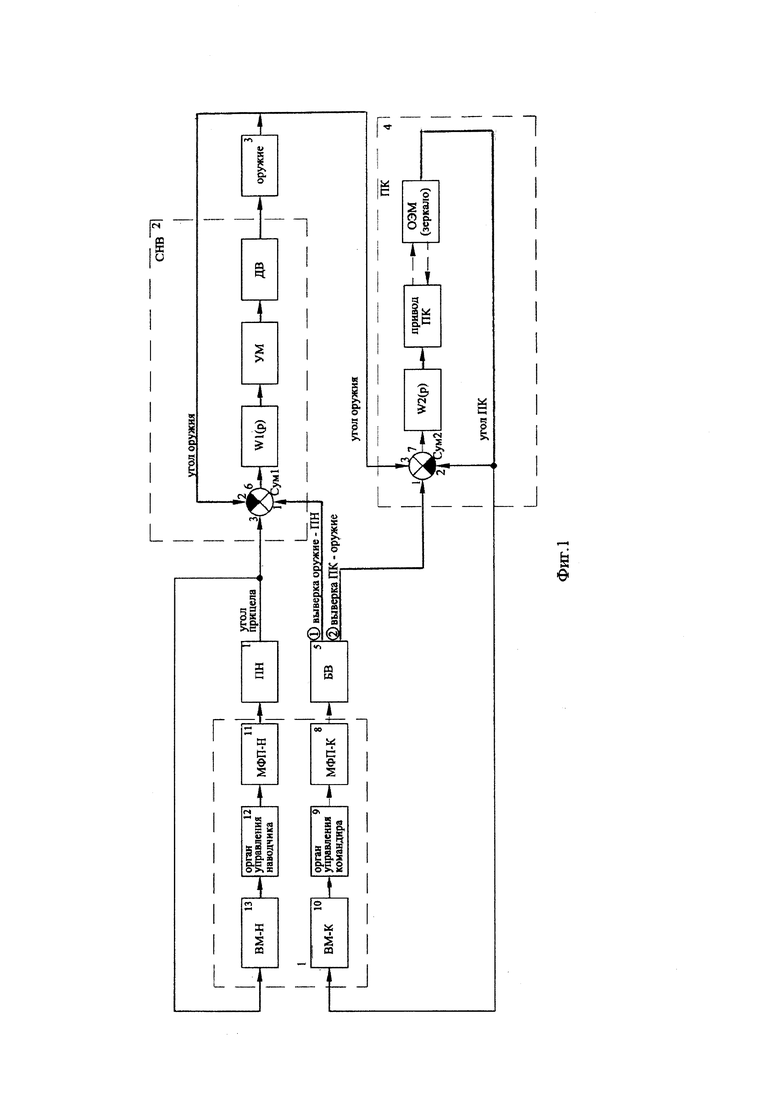
Сущность группы изобретений поясняются чертежом, представленным на фиг. 1, на котором показана функциональная схема системы согласования оптических осей прицелов и оружия комплекса вооружения боевой машины, где:
1 - прицел наводчика (ПН); 2 - система наведения вооружения (СНВ), 3 - оружие, 4 - прицел командира (ПК), 5 - бортовой вычислитель (БВ) с датчиковой аппаратурой, 6 - первый сумматор (СУМ 1), 7 - второй сумматор (СУМ2), 8 - многофункциональный переключатель командира (МФП-К), 9 - орган управления командира, 10 - видемодуль командира (ВМ-К), 11 - многофункциональный переключатель наводчика (МФП-Н), 12 - орган управления наводчика, 13 - видеомодуль наводчика (ВМ-Н).
Система согласования оптических осей прицелов и оружия комплекса вооружения боевой машины содержит ПН 1, СНВ 2, оружие 3, ПК 4, а также БВ 5 с датчиковой аппаратурой, первый и второй выходы которого соединены соответственно с первыми входами первого и второго сумматоров (СУМ1 6, СУМ2 7), входящих в состав соответственно СНВ 2 и ПК 4, на вторые входы которых поступают сигналы отрицательной обратной связи с выходов соответственно оружия 3 и оптико-электронного модуля зеркала прицела командира 4, также ко входу БВ 5 подсоединены последовательно соединенные введенные МФП-К 8, орган управления командира 9 и ВМ-К 10, вход которого соединен с выходом ПК 4, кроме того, ко входу ПН 1 подсоединены последовательно введенные МФП-Н 11, орган управления наводчика 12 и ВМ-Н 13, вход которого соединен с выходом ПН 1.
Способ согласования оптических осей прицелов и оружия комплекса вооружения боевых машин осуществляется следующим образом.
На определенном расстоянии (20,0±0,1) м от дульного среза ствола автоматической пушки (АП) комплекса вооружения боевой машины устанавливают выверочную мишень, а в ствол АП устанавливается ТХП. Далее удерживают прицельную марку ПН с центром марки «ПН» на мишени, отклоняя рукоятки пульта управления наводчика. По командам наблюдателя последовательными отклонениями МФП на пульте управления наводчика добиваются отклонения перекрестия ТХП от центра марки «АП» на определенную величину, затем совмещают его с центром перекрестия марки «АП» на мишени и сохраняют его.
Далее устанавливают ТХП в ствол пулемета и устанавливают тип соответствующего боеприпаса. Выполняют аналогичную проверку, контролируя перекрестие положения ТХП относительно знака «Пулемет» на мишени. Затем повторяют эти действия для блока пускового левого и правого.
Выполняют аналогичные действия при управлении соответствующим оружием с установленным в его ствол (пусковую установку) ТХП с места командира, наводя прицельную марку ПК на марку «ПК» на мишени.
Затем совмещают прицельную марку ПК с центром марки «ПК» на мишени. После завершения разворота боевого отделения контролируют нахождение прицельной марки ПН в районе знака «ПН» на мишени.
Далее выполняют проверку, выполнив целеуказание с места наводчика и контролируя положение прицельной марки ПК относительно марки «ПК» на мишени.
Использование заявляемого способа и реализующей его системы обеспечит по сравнению с существующими следующие преимущества:
- повышение эксплуатационных характеристик комплекса вооружения за счет уменьшения времени подготовки к стрельбе и, как следствие, более раннего открытия огня по выбранной цели с обеспечением требуемой точности прицеливания;
- повышение точности стрельбы, особенно с подвижного носителя;
- повышение точности стрельбы и отсюда ее эффективности, в особенности по подвижным, в частности скоростным воздушным целям;
-обеспечение подготовки вооружения к стрельбе в режиме дистанционного управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс вооружения боевой машины с информационно-управляющей системой | 2016 |
|
RU2628027C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| Система управления огнем боевой машины и блок управления автоматикой | 2018 |
|
RU2718186C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
| Способ повышения точности стрельбы артиллерийского вооружения боевой машины по цели (варианты) и система для его реализации | 2018 |
|
RU2692844C1 |
| Система управления и наведения вооружения боевой машины | 2019 |
|
RU2723501C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| КОМПЛЕКС УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ТАНКА | 2002 |
|
RU2226664C2 |
Способ согласования оптических осей прицелов и оружия комплекса вооружения боевых машин, при котором располагают боевую машину БМ на горизонтальной площадке, установку контрольной мишени обеспечивают на соответствующей дальности таким образом, чтобы установочная линия на этой мишени была параллельна горизонтальной линии прицела наводчика (ПН), производят совмещение прицельной марки ПН с соответствующей ему маркой на мишени, установку трубки холодной пристрелки (ТХП) в ствол оружия или пусковую установку и их наведение на соответствующую данному оружию марку на контрольной мишени. Совмещение прицельной марки ПН осуществляют также и по удаленной точке, находящейся на предварительно измеренном расстоянии (дальности сведения), а совмещение прицельной марки ПН осуществляют по изображению на видеомониторе наводчика (ВМ-Н) с помощью органа управления наводчика, при этом оружие должно находиться в режиме слежения за ПН, а ПК - в режиме слежения за оружием. С помощью системы наведения вооружения (СНВ) последовательными отклонениями многофункционального переключателя (МФП) наводчика добиваются совмещения перекрестия ТХП с центром соответствующей марки на мишени или по удаленной точке и сохраняют полученные параметры в бортовом вычислителе (БВ). Данную последовательность действий повторяют для каждого вида оружия комплекса вооружения относительно каждого типа прицела, а также прицелов относительно друг друга сохраняют параметры в БВ, а в процессе работы комплекса осуществляют периодически контроль взаимного положения прицелов и оружия с помощью ПК по изображению на ВМ-К. Система согласования оптических осей прицелов и оружия комплекса вооружения боевой машины (БМ) содержит прицел наводчика (ПН), оружие с установленной в стволе трубкой холодной пристрелки (ТХП), контрольную мишень, дополнительно введены система наведения вооружения (СНВ), подключенная к выходу ПН последовательно с оружием, прицел командира (ПК), а также бортовой вычислитель, ко входу БВ дополнительно подсоединены последовательно соединенные между собой введенные многофункциональный переключатель (МФП) командира, орган управления командира и видеомодуль командира (ВМ-К), а ко входу ПН дополнительно подсоединены последовательно соединенные между собой введенные МФП наводчика, орган управления наводчика и видеомодуль наводчика (ВМ-Н). В качестве органов управления могут использоваться пульт управления наводчика (ПУН) или пульт управления командира (ПУК). Технический результат - повышение эксплуатационных характеристик комплекса вооружения, более раннее открытие огня. 2 н. и 1 з.п. ф-лы, 1 ил.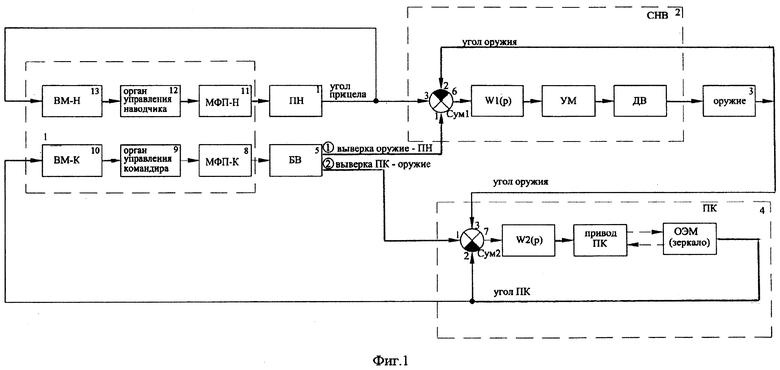
1. Способ согласования оптических осей прицелов и оружия комплекса вооружения боевой машины (БМ), включающий расположение БМ на горизонтальной площадке, установку контрольной мишени на соответствующей дальности таким образом, чтобы установочная линия на этой мишени была параллельна горизонтальной линии прицела наводчика (ПН), совмещение прицельной марки ПН с соответствующей ему маркой на мишени, установку трубки холодной пристрелки (ТХП) в ствол оружия или пусковую установку и их наведение на соответствующую данному оружию марку на контрольной мишени, отличающийся тем, что совмещение прицельной марки ПН осуществляют также и по удаленной точке, находящейся на предварительно измеренном расстоянии (дальности сведения), а совмещение прицельной марки ПН осуществляют по изображению на видеомониторе наводчика (ВМ-Н) с помощью органа управления наводчика, при этом оружие должно находиться в режиме слежения за ПН, а ПК - в режиме слежения за оружием, с помощью системы наведения вооружения (СНВ) последовательными отклонениями многофункционального переключателя (МФП) наводчика добиваются совмещения перекрестия ТХП с центром соответствующей марки на мишени или по удаленной точке и сохраняют полученные параметры в бортовом вычислителе (БВ), повторяют данную последовательность действий для каждого вида оружия комплекса вооружения, далее осуществляют согласование положения ПК и оружия путем перемещения оружия с использованием МФП командира, контролируя наведение по изображению на видеомодуле командира (ВМ-К), затем переводят ПН в режим слежения за ПК и, удерживая с помощью органа управления командира прицельную марку ПК на соответствующей марке на мишени или удаленной точке, последовательными отклонениями МФП наводчика добиваются точного совмещения прицельной марки ПН с соответствующей маркой на мишени, сохраняют параметры в БВ, далее переводят ПК в режим слежения за положением ПН и, удерживая с помощью органа управления наводчика марку ПН на соответствующей марке на мишени, последовательными отклонениями МФП командира добиваются совмещения прицельной марки ПК с соответствующей маркой на мишени, сохраняют параметры в БВ, причем во время стрельбы артвооружения постоянно пересчитывают в БВ значения угловых рассогласований с учетом введенных до стрельбы дальностей сведения оружия, а также измеряемой при стрельбе текущей дальности, геометрического смещения прицела относительно оружия (параллаксов), длины ствола и угла его подъема относительно линии визирования, далее в процессе работы комплекса осуществляют периодически контроль взаимного положения прицелов и оружия с помощью ПК по изображению на ВМ-К.
2. Система согласования оптических осей прицелов и оружия комплекса вооружения боевой машины (БМ), содержащая прицел наводчика (ПН), оружие с установленной в стволе трубкой холодной пристрелки (ТХП), контрольную мишень, отличающаяся тем, что в нее дополнительно введены система наведения вооружения (СНВ), подключенная к выходу ПН последовательно с оружием, содержащая в том числе первый сумматор (СУМ1), далее прицел командира (ПК), содержащий в том числе второй сумматор (СУМ2), также введен бортовой вычислитель (БВ), причем первый и второй выходы БВ соединены соответственно с первыми входами первого и второго сумматоров (СУМ1, СУМ2), а вторые входы СУМ1 и СУМ2 замкнуты отрицательной обратной связью с выходами соответственно оружия и ПК, а ко входу БВ дополнительно подсоединены последовательно соединенные между собой введенные многофункциональный переключатель (МФП) командира, орган управления командира и видеомодуль командира (ВМ-К), вход которого соединен с выходом ПК, кроме того, ко входу ПН дополнительно подсоединены последовательно соединенные между собой введенные МФП наводчика, орган управления наводчика и видеомодуль наводчика (ВМ-Н), вход которого соединен с выходом ПН.
3. Система согласования оптических осей прицелов и оружия комплекса вооружения БМ по п. 2, отличающаяся тем, что в качестве органов управления могут использоваться пульт управления наводчика (ПУН) или пульт управления командира (ПУК).
| RU 2000114127 A, 20.04.2002 | |||
| ОРУЖЕЙНАЯ УСТАНОВКА С ПРИЦЕЛЬНЫМ УСТРОЙСТВОМ И СПОСОБ ЕГО ВЫВЕРКИ | 2003 |
|
RU2235263C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ И ВЫВЕРКИ СПАРЕННОГО ПУЛЕМЕТА В ТАНКЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2124174C1 |
| DE 58906236 D1, 05.01.1994 | |||
| DE 10202548 A1, 07.08.2003. | |||

