Изобретение относится к области вооружения и военной техники, в частности к комплексам вооружения боевых машин (БМ) типа боевых машин пехоты (БМП), танков, бронетранспортеров (БТР), боевых машин десанта (БМД) и т.п.
Известен способ стрельбы с закрытых позиций по ненаблюдаемой цели (В.С. Кузнецов, Г.Ф. Платонов, М.А. Свистунов. Стрельба с закрытых позиций. Под ред. генерал-майора артиллерии С.С. Волкенштейна. Изд. Военной ордена Ленина академии бронетанковых войск им. И.В. Сталина, М., 1958, стр. 23.).
По вышеназванному способу обнаруживают и распознают цели, определяют топографические координаты и высоту огневой позиции БМ с установленным на ней орудием над уровнем моря, выбирают основное направление стрельбы, получают топографические координаты цели и определяют ее высоту над уровнем моря, выбирают тип снаряда, вводят поправки на отклонение условий стрельбы от табличных, на деривацию и при необходимости поправки угла прицеливания на угол места цели, назначают на основе исчисленных данных исходные установки стрельбы и отрабатывают их относительно предварительно выбранного основного направления, выполняют стрельбу по цели.
Недостатком вышеназванного способа является большое время на выполнение необходимых расчетов и операций по нацеливанию орудий.
Известен способ стрельбы по цели реализуемый в боевой машине БМП-3 (Бронетехника. Изд. Попурри, Минск, 2000, стр. 185-190).
По вышеназванному способу обнаруживают и распознают цели с помощью оптического прицела наводчика, электрически связанного с оружием, выбирают основное направление стрельбы, вычислительные операции осуществляют с использованием блока управления и баллистического вычислителя с системой датчиков входной информации, включающей лазерный дальномер, отрабатывают поправки стабилизатором вооружения, выполняют стрельбу по цели.
Недостатками вышеназванного способа является большое время на обнаружение и распознавание целей, невозможность автоматизированного (следовательно, с минимальными затратами времени) наведения оружия на цели, координаты которых известны заранее (например, по разведданным с современных средств обнаружения, с беспилотных летательных аппаратов, со спутниковых средств).
Известен способ стрельбы, реализованный в комплексе вооружения боевой машины (RU, патент на изобретение №2351876. Комплекс вооружения боевой машины, приоритетный №2007124061 от 26.06.2007, Бюл. №10 от 10.04.2009).
По вышеназванному способу обнаруживают и распознают цель, определяют топографические координаты и высоту огневой позиции БМ, с установленным на ней орудием, над уровнем моря, выбирают основное направления стрельбы, получают топографические координаты цели и определяют ее высоту над уровнем моря, выбирают тип снаряда, вводят поправки на отклонение условий стрельбы от табличных, на деривацию и при необходимости - поправки угла прицеливания на угол места цели, назначают на основе вычисленных данных исходные установки стрельбы и отрабатывают их относительно предварительно выбранного основного направления, выполняют стрельбу по цели.
Недостатками вышеназванного способа является большое время на обнаружение и распознавание целей, невозможность автоматизированного (следовательно, с минимальными затратами времени) введение координат цели, в тех случаях, когда координаты целей известны заранее (например, по разведданным с современных средств обнаружения, с беспилотных летательных аппаратов, со спутниковых средств).
Наиболее близким по технической сущности и достигаемому результату является способ стрельбы боевой машины с закрытых позиций по ненаблюдаемой цели (RU, патент на изобретение №2444693. Способ стрельбы боевой машины с закрытых позиций по ненаблюдаемой цели и система управления огнем для ее осуществления, приоритетный №2010100521 от 11.01.2010, Бюл. №7 от 20.07.2011) и принят за прототип.
По известному способу, по эквивалентности, обнаруживают и распознают цели, определяют топографические координаты и высоту огневой позиции боевой машины с установленным на ней орудием над уровнем моря, выбирают основное направление стрельбы, при стрельбе с закрытых позиций по ненаблюдаемой цели получают топографические координаты цели и ее высоту над уровнем моря, выбирают тип снаряда, вводят поправки на отклонение условий стрельбы от табличных, на деривацию и при необходимости - поправки угла прицеливания на угол места цели, назначают на основе вычисленных данных исходные установки стрельбы и отрабатывают их относительно предварительно выбранного основного направления, вычислительные операции осуществляют с использованием блока управления и баллистического вычислителя, координаты боевой машины определяют автоматически с помощью системы измерения координат или вводят их в блок управления вручную, затем контролируют поступающие с автоматических датчиков метеоданные, координаты цели и вводят их в блок управления, исходное положение продольной оси боевой машины определяют относительно предварительно выбранного основного направления по горизонту, определенного с учетом предварительно введенных в блок управления координат ориентира, или относительно направления север-юг по горизонту с помощью датчика азимута, и вводят в блок управления, определяют потребный угол разворота линии визирования на цель по горизонту и на угол места цели из-за разности высот расположения машины и цели, определяют с помощью баллистического вычислителя рассогласование положения линии визирования прицела наводчика относительно плоскости горизонта, предварительно определив положение с помощью датчика крена, передают по каналу связи потребную величину рассогласования по вертикали из баллистического вычислителя в блок управления, затем из блока управления выдают ее в автоматическую оптикотелетепловизионную систему, с помощью которой вырабатывают сигнал управления зеркалом в канале вертикального наведения, тем самым перемещают зеркало прицела наводчика по вертикали в сторону уменьшения рассогласования а, при проведении стрельбы с закрытых позиций по ненаблюдаемой цели, обеспечивают слежение линии визирования прицела наводчика за линией горизонта, принимают по каналу информационного обмена от датчика поворота башни значение угла разворота башни относительно оси машины, рассчитывают величину рассогласования между положением башни по горизонту и направлением на цель, которую выдают в автоматическую оптикотелетепловизионную систему, с помощью которой вырабатывают сигнал управления зеркалом в канале горизонтального наведения, приводят таким образом к движению зеркала оптико-телевизионный прицел наводчика по горизонту в сторону уменьшения рассогласования, и отрабатывают с погрешностью не более заданной рассогласование орудия относительно линии визирования по вертикальному и горизонтальному каналам, рассчитывают в блоке управления, при проведении стрельбы с закрытых позиций по ненаблюдаемой цели, дальности до цели, передают в баллистический вычислитель код дальности до цели, где определяют углы прицеливания и упреждения по вертикальному и горизонтальному наведению с учетом поправок на условия стрельбы, отрабатывают поправки стабилизатором вооружения, формируют с помощью баллистического вычислителя команду разрешения выстрела и передают ее по каналу информационного обмена в пульт оператора, где подготавливают цепи электроспуска и выполняют стрельбу по цели
Недостатком известного способа является последовательное выполнение внешних целеуказаний (при необходимости проведения стрельбы по нескольким целям), что приводит к дополнительному (непроизводительному, а в большинстве случаев и опасному) увеличению времени подготовки и проведения стрельбы на огневой позиции. Кроме того, введение координат цели должно осуществляться вручную на пульте в системе управления огнем (по полученным данным, переданным по каналам голосовой связи), что увеличивает вероятность внесения погрешностей операторами.
Технической задачей, на решение которой направлен предлагаемый способ, является сокращение времени на подготовку и проведении стрельбы боевыми машинами на огневых позициях, а также уменьшение вероятности внесения погрешностей операторами и командирами БМ при подготовке и проведении стрельбы боевыми машинами на огневых позициях.
Техническая задача предлагаемого способа стрельбы боевой машины решается тем, что обнаруживают и распознают цели, определяют топографические координаты и высоту огневой позиции боевой машины с установленным на ней орудием над уровнем моря, выбирают основное направление стрельбы, при стрельбе с закрытых позиций по ненаблюдаемой цели получают топографические координаты цели и определяют ее высоту над уровнем моря, выбирают тип снаряда, вводят поправки на отклонение условий стрельбы от табличных, на деривацию и при необходимости - поправки угла прицеливания на угол места цели, назначают на основе вычисленных данных исходные установки стрельбы и отрабатывают их относительно предварительно выбранного основного направления, отличие состоит в том, что вычислительные операции осуществляют с использованием блока управления и баллистического вычислителя, координаты боевой машины определяют автоматически с помощью системы измерения координат или вводят их в блок управления вручную, затем контролируют поступающие с автоматических датчиков метеоданные, координаты цели и вводят их в блок управления, исходное положение продольной оси боевой машины определяют относительно предварительно выбранного основного направления по горизонту, определенного с учетом предварительно введенных в блок управления координат ориентира, или относительно направления север-юг по горизонту с помощью датчика азимута, и вводят в блок управления, определяют потребный угол разворота линии визирования на цель по горизонту и на угол места цели из-за разности высот расположения машины и цели, определяют с помощью баллистического вычислителя рассогласование положения линии визирования прицела наводчика относительно плоскости горизонта, предварительно определив положение с помощью датчика крена, передают по каналу связи потребную величину рассогласования по вертикали из баллистического вычислителя в блок управления, затем из блока управления выдают ее в автоматическую оптикотелетепловизионную систему, с помощью которой вырабатывают сигнал управления зеркалом в канале вертикального наведения, тем самым перемещают зеркало прицела наводчика по вертикали в сторону уменьшения рассогласования а, при проведении стрельбы с закрытых позиций по ненаблюдаемой цели, обеспечивают слежение линии визирования прицела наводчика за линией горизонта, принимают по каналу информационного обмена от датчика поворота башни значение угла разворота башни относительно оси машины, рассчитывают величину рассогласования между положением башни по горизонту и направлением на цель, которую выдают в автоматическую оптикотелетепловизионную систему, с помощью которой вырабатывают сигнал управления зеркалом в канале горизонтального наведения, приводят таким образом к движению зеркала оптико-телевизионный прицел наводчика по горизонту в сторону уменьшения рассогласования, и отрабатывают с погрешностью не более заданной рассогласование орудия относительно линии визирования по вертикальному и горизонтальному каналам, рассчитывают в блоке управления, при проведении стрельбы с закрытых позиций по ненаблюдаемой цели, дальности до цели, передают в баллистический вычислитель код дальности до цели, где определяют углы прицеливания и упреждения по вертикальному и горизонтальному наведению с учетом поправок на условия стрельбы, отрабатывают поправки стабилизатором вооружения, формируют с помощью баллистического вычислителя команду разрешения выстрела и передают ее по каналу информационного обмена в пульт оператора, где подготавливают цепи электроспуска и выполняют стрельбу по цели, при этом при проведении стрельбы с открытых позиций по наблюдаемой цели, перед передачей в баллистический вычислитель кода дальности до цели, дальность до цели определяют с помощью лазерного дальномера, и с его же помощью, при отсутствии предварительно известных координат цели, вычисляют координаты цели, кроме того, при определении исходного положения продольной оси боевой машины, при отсутствии заранее определенного ориентира с известными координатами, в качестве ориентира с известными координатами, используют взаимодействующую вторую боевую машину, также оснащенную средствами автоматического определения координат боевой машины или выбирают в качестве такого ориентира точку при выдвижении боевой машины на огневую позицию, при прохождении которой измеряют и запоминают ее координаты с помощью средств определения координат боевой машины или выбирают в качестве такого ориентира видимую неподвижную цель, координаты которой переданы в боевую машину как разведданные.
Дополнительно, в случаях, когда по тем или иным причинам отсутствуют необходимые определению исходного положения продольной оси БМ ориентиры с заранее известными топографическими координатами (или, например, находятся вне зоны прямой видимости для оптических средств БМ) и для сокращения времени подготовки к стрельбе в этих условиях:
- при определении исходного положения продольной оси боевой машины с помощью взаимодействующей второй боевой машины, размещают боевые машины на огневых позициях, удаленных друга на дальности, достаточной для обеспечения требуемой точности определения исходного положения продольной оси боевой машины, причем для определения положения продольных осей боевых машин последовательно или одновременно на взаимодействующих боевые машины взаимно наводят оптико-телевизионные прицелы, задействуют лазерные дальномеры и определяют азимут относительно исходного положения продольной оси боевой машины и фактическую дальность и передают по каналу передачи цифровых данных между взаимодействующими боевыми машинами координаты боевых машин на огневых позициях;
- при определении исходного положения продольной оси боевой машины с помощью дополнительной точки на трассе выдвижения боевой машины на огневую позицию, такую точку выбирают на удалении от планируемой огневой позиции, достаточном для обеспечения требуемой точности определения исходного положения продольной оси боевой машины, а после выдвижения боевой машины на огневую позицию наводят оптико-телевизионный прицел на дополнительную точку, задействуют лазерный дальномер, определяют фактическую дальность, азимут и используют координаты точки, зафиксированные при выдвижении боевой машины на огневую позицию, и азимутальное измерение до точки, выполненные на огневой позиции, для определения исходного положения продольной оси боевой машины.
Также дополнительно, для дальнейшего уменьшения времени решения огневой задач боевыми машинами:
- в автоматизированной системе управления огнем боевой машины фиксируют несколько целей с их координатами и после выполнения стрельбы по цели вводят координаты следующей цели в соответствии с ее приоритетом и выполняют автоматически цикл подготовки к стрельбе и стрельбу по следующей цели;
- при участии нескольких боевых машин в решении огневой задачи, перечень целей с координатами передают на все боевые машины, а их приоритетами в каждой автоматизированной системе управления огнем боевой машины указывают распределение целей по боевым машинам, причем по результатам стрельбы по целям при необходимости изменяют приоритеты, чем проводят оперативное перераспределение целей по боевым машинам.
Известна система управления огнем, представленная в комплексе вооружения БМ (RU, патент на изобретение №2351876. Комплекс вооружения боевой машины, приоритетный №2007124061 от 26.06.2007, Бюл. №10 от 10.04.2009).
В вышеназванном комплексе вооружения БМ включены, по эквивалентности, баллистический вычислитель с системой датчиков входной информации, в состав которой входит датчик азимута, стабилизатор вооружения, блок управления, оптико-телевизионный прицел наводчика, а также телетепловизионный автомат сопровождения целей, пульт командира и пульт оператора, система измерения координат, в состав которой входят антенный блок, приемник и преобразователь угол-код, а также место командира, включающее последовательно соединенные пульт управления и видеосмотровое устройство командира, причем первые входы и первые выходы оптико-телевизионного прицела наводчика, телетепловизионного автомата сопровождения целей, блока управления, стабилизатора, баллистического вычислителя, пульта командира и пульт оператора соединены с цифровым каналом связи, четвертый вход и четвертый выход блок управления соединены соответственно со вторым выходом и вторым входом телетепловизионного автомата сопровождения целей, второй выход оптико-телевизионного прицела наводчика соединен с четвертым входом стабилизатора вооружения, третий вход которого соединен со вторым выходом пульта оператора.
Недостатком вышеназванного комплекса вооружения является большое время решения комплексной огневой задачи. В условиях повышение скоротечности и динамичности современного боя, с развитием средств разведки, в том числе космического базирования, средств автоматической передачи данных, неэффективно тратить время на ожидание артиллерийских подразделений поддержки. Совершенствование боевой мощи вооружения БМ позволяет возложить решение дополнительного ряда задач на БМ и, в частности, уничтожение целей с известными координатами (по разведданным), на большем удалении (чем ранее присуще было для БМ), в том числе, и с закрытых боевых позиций.
Наиболее близкой по технической сущности и достигаемому результату является система управления огнем (RU, патент на изобретение №2444693. Способ стрельбы боевой машины с закрытых позиций по ненаблюдаемой цели и система управления огнем для ее осуществления, приоритетный №2010100521 от 11.01.2010, Бюл. №7 от 20.07.2011).
В известной системе, по эквивалентности, включены баллистический вычислитель с системой датчиков входной информации, в состав которой входит датчик азимута, стабилизатор вооружения, блок управления, оптико-телевизионный прицел наводчика, а также телетепловизионный автомат сопровождения целей, пульт командира и пульт оператора, система измерения координат, в состав которой входят антенный блок, приемник и преобразователь угол-код, а также место командира, включающее последовательно соединенные пульт управления и видеосмотровое устройство командира, причем первые входы и первые выходы оптико-телевизионного прицела наводчика, телетепловизионного автомата сопровождения целей, блока управления, стабилизатора, баллистического вычислителя, пульта командира и пульт оператора соединены с цифровым каналом связи, четвертый вход и четвертый выход блок управления соединены соответственно со вторым выходом и вторым входом телетепловизионного автомата сопровождения целей, второй выход оптико-телевизионного прицела наводчика соединен с четвертым входом стабилизатора вооружения, третий вход которого соединен со вторым выходом пульта оператора, система измерения координат соединена с пятым входом блока правления, третий выход блока управления соединен с первым входом видеосмотрового устройства командира, выход которого соединен с пультом управления, второй выход которого соединен с третьим входом блок управления.
Недостатком известной системы управления огнем является большое время решения комплексной огневой задачи. В условиях повышение скоротечности и динамичности современного боя, с развитием средств разведки, в том числе космического базирования, средств автоматической передачи данных, неэффективно тратить время при нахождении БМ на огневой позиции на выполнение расчетом большого числа ручных операций, которые затягивают время выполнения огневой задачи, увеличивают вероятность ошибочных действий номеров расчета и увеличивают риски БМ на огневой позиции.
Технической задачей, на решение которой направлена предлагаемая система управления огнем, является сокращение времени на подготовку и проведение стрельбы боевыми машинами с огневых позиций по целям, находящимся как в зоне видимости оптических средств БМ, так и вне зон видимости, а также уменьшение вероятности внесения погрешностей операторами и командирами БМ при подготовке и проведении стрельбы боевыми машинами на огневых позициях.
Техническая задача решается тем, что предлагаемая система управления огнем включает баллистический вычислитель с системой датчиков входной информации, в состав которой входит датчик азимута, стабилизатор вооружения, блок управления, оптико-телевизионный прицел наводчика, а также телетепловизионный автомат сопровождения целей, пульт командира и пульт оператора, система измерения координат, в состав которой входят антенный блок, приемник и преобразователь угол-код, а также место командира, включающее последовательно соединенные пульт управления и видеосмотровое устройство командира, причем первые входы и первые выходы оптико-телевизионного прицела наводчика, телетепловизионного автомата сопровождения целей, блока управления, стабилизатора, баллистического вычислителя, пульта командира и пульт оператора соединены с цифровым каналом связи, четвертый вход и четвертый выход блок управления соединены соответственно со вторым выходом и вторым входом телетепловизионного автомата сопровождения целей, второй выход оптико-телевизионного прицела наводчика соединен с четвертым входом стабилизатора вооружения, третий вход которого соединен со вторым выходом пульта оператора, система измерения координат соединена с пятым входом блока правления, третий выход блока управления соединен с первым входом видеосмотрового устройства командира, выход которого соединен с пультом управления, второй выход которого соединен с третьим входом блок управления, при этом в нее дополнительно введен комплекс разведки управления и связи, реализованный как компьютер мобильного типа, первые входы и выходы которого соединены через приемник-передатчик коммуникационной системы с комплексами разведки управления и связи других боевых машин, участвующими в решении огневой задачи, и с комплексами разведки управления и связи мобильных или стационарных командных пунктов, а вторые входы и выходы соединены через адаптер с цифровым каналом связи.
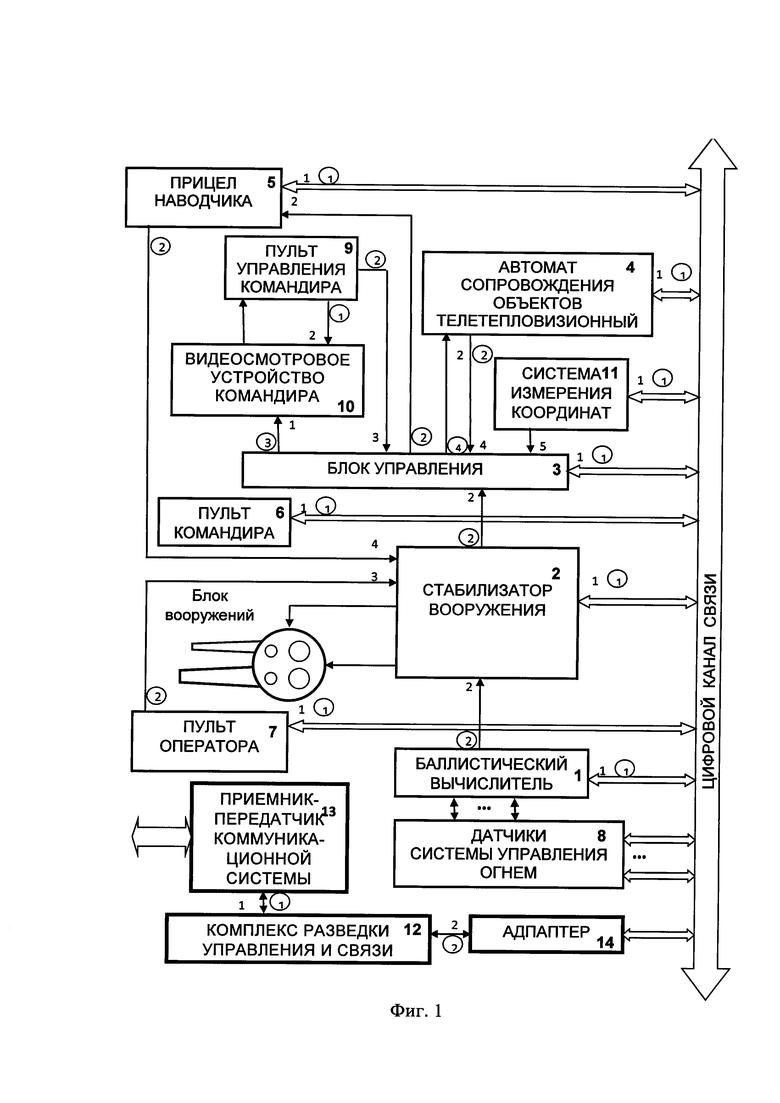
Предлагаемый группа изобретений поясняется фиг. 1 и фиг. 2.
На фиг. 1 и фиг. 2. представлена структурная схема предлагаемой системы управления огнем БМ. Пронумерованные входы и выходы компонентов системы дополнительно помечены на схеме (причем номера выходов помещены в окружности).
Система управления огнем содержит:
- баллистический вычислитель 1, с системой датчиков входной информации (на фиг. 1 датчики системы управления огнем 8), в состав которой входит датчик азимута, крена БМ и др.;
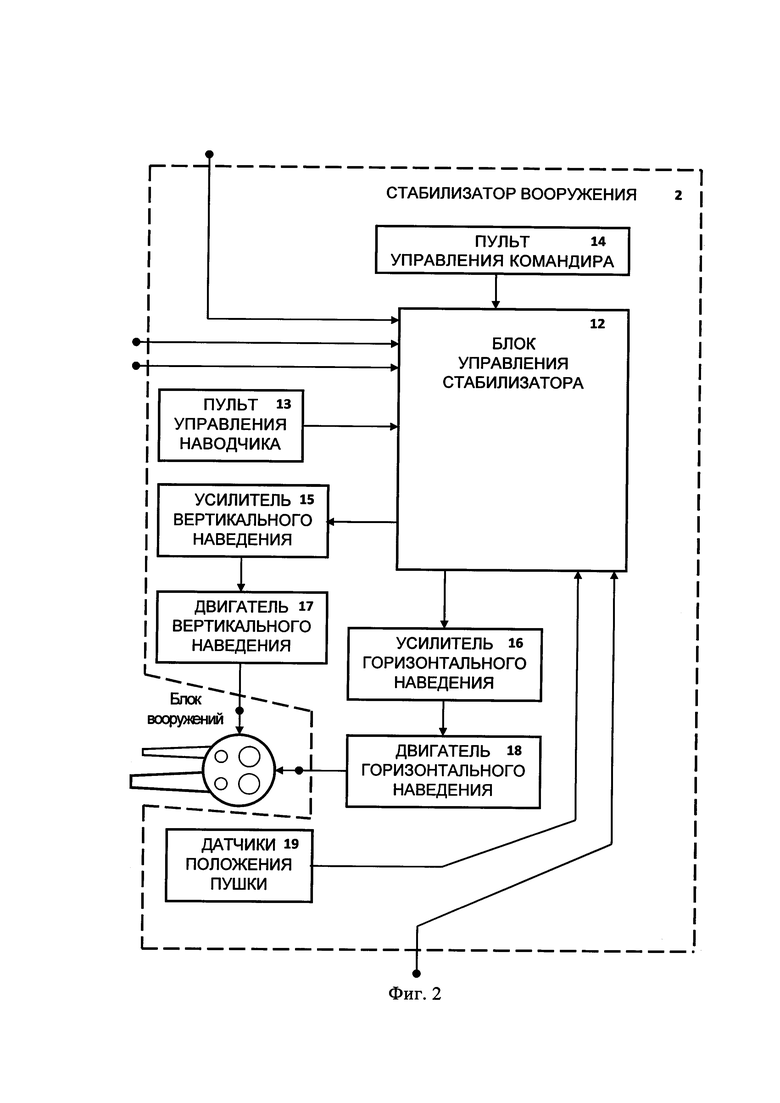
- стабилизатор вооружения 2 (на фиг. 1 условно обозначен и блок вооружений, положением которого по азимуту и по углу места управляет стабилизатор 2; не показаны на схеме имеющиеся в составе стабилизатора пульты управления, двигатели вертикального и горизонтального наведения, датчики положения блока вооружений, в совокупности обеспечивающие высокоточное наведение на цель блока вооружений);
- блок управления 3;
- автомат сопровождения объектов телетепловизионный 4;
- оптико-телевизионный прицел наводчика (на схеме - прицел наводчика) 5;
- пульт командира 6;
- пульт оператора 7;
- датчики системы управления огнем 8;
- пульт управления командира 9;
- видеосмотровое устройство командира 10 (вместе с пультом 9 образует место командира для видеообзора обстановки и выполнения определенных действий по результатам обзора);
- система измерения координат 11, в состав которой входят антенный блок, приемник и преобразователь угол-код (работая абонентом спутниковой навигационной системы блок 4 выдает координаты БМ).
Указанные выше компоненты системы по эквивалентности полностью повторяют все основные признаки прототипа, реализуют в полной мере интерфейсные и технические возможности известной системы управления огнем БМ (например, реализованные в БМД-4).
В отличие от известной системы управления огнем в состав предлагаемой системы дополнительно включены:
- комплекс разведки, управления и связи 12;
- приемник-передатчик коммуникационной системы 13;
- адаптер 14;
В первом приближении основу этих компонентов можно реализовать из отдельных составных частей существующего комплекса разведки, управления и связи (КРУС) «Стрелец», например, ноутбук (ПКК) - в качестве блока 12, радиостанция (Р-438-М) - в качестве приемника-передатчика 13. Адаптер 14 предназначен для стыковки с цифровым каналом и для передачи цифровых данных в цифровой канал с форматом RS-485.
Включение дополнительных средств расширяет интерфейсные и технические возможности системы управления огнем БМ.
Определяющим фактором в повышении технического уровня БМ является переход при внешних целеуказаниях к передаче цифровых данных. При передаче данных о топографических координатах цели в цифровом формате через приемник-передатчик коммуникационной системы 13 в комплекс разведки, управления и связи 12 достаточно выделить данные по цели на сенсорном экране ПКК и следующим действием (эквивалентным выбору опции в всплывающем меню на обычном компьютере) передать из блока 12 через адаптер 14 эти координаты на пульты (наводчика, командира), в баллистический вычислитель 2, в блок управления 3. Отсутствие необходимости ввода топографических координат цели на одном из пультов БМ сокращает время подготовки к выстрелу и снижает риск возможных ошибок ввода данных. Использование автоматизированных расчета необходимых поправок и автоматизированного наведения блока оружия, с малым риском ошибок ручного ввода данных, с повышением точности автоматизированного наведения по сравнению с ручным, существенно повышает и точность стрельбы. Уменьшается и время наведения. Автоматизированное наведение используют как по стрельбе с закрытых позиций (как в известной системе) так и по видимым целям (в отличие от известной системы).
Передача цифровых данных по нескольким целям с указанием их приоритетов на БМ или на группу БМ позволяет развить это преимущество и организовать скоординированное и с малыми затратами времени решение огневой задачи (03) как по целям в зоне видимости, так и с закрытых позиций (реализуются п. 4 и п. 5 формулы изобретения).
Одна из проблем, препятствующих в полной мере использовать возможности известной системы управления огнем БМ, является, в отдельных случаях, отсутствие удовлетворительных ориентиров с известными и достаточно точными топографическими координатами. Такие ориентиры необходимы для точного определение положения продольной оси БМ (коррекции данных о положении продольной оси) на огневой позиции, что необходимо для автоматизированного высокоточного наведения оружия на цели. Известное применение в БМ датчиков азимута не вполне удовлетворительно по двум причинам: большие погрешности таких датчиков (превышающих требования обеспечения высокоточного наведения оружия); погрешности автономных датчиков азимута при длительном движении БМ накапливаются.
В настоящей группе изобретений для дополнительных возможностей уточнения положения продольной оси предлагается:
использование взаимодействующей БМ (вторая группа признаков в отличительной части первого пункта формулы - «… кроме того, при определении исходного положения продольной оси боевой машины, при отсутствии заранее определенного ориентира с известными координатами, в качестве ориентира с известными координатами, используют взаимодействующую вторую боевую машину, также оснащенную средствами автоматического определения координат боевой машины …» и второй пункт формулы);
использование дополнительного ориентира, выбранного и с замеренными координатами в ходе выдвижения БМ на огневую позицию (третья группа признаков в отличительной части первого пункта формулы - «… или выбирают в качестве такого ориентира точку при выдвижении боевой машины на огневую позицию, при прохождении которой измеряют и запоминают ее координаты с помощью средств определения координат боевой машины …» и третий пункт формулы);
использование в качестве ориентира одной из неподвижных целей с известными координатами (четвертая группа признаков в отличительной части первого пункта формулы - «… или выбирают в качестве такого ориентира видимую неподвижную цель, координаты которой переданы в боевую машину как разведданные.»).
Все возможности известной системы управления огнем реализуются и в предлагаемой системе.
В отличие от известной системы, при выдвижении БМ на огневую позицию, в случае, когда одна из БМ по решению командира будет использована в качестве ориентира, при выходе БМ на выбранную ориентирную позицию выполняются следующие действия:
в БМ (ориентир) с помощью системы измерения координат 11 измеряют топографические координаты БМ-ориентира; полученные координаты через цифровой канал связи, адаптер 14, комплекс разведки, управления и связи 12, приемник-передатчик коммуникационной системы 13, по радиоканалу, через приемник-передатчик коммуникационной системы 13, комплекс разведки, управления и связи 12, адаптер 14 по цифровому каналу связи БМ на огневой позиции передаются в блок управления 3, баллистический вычислитель 1 БМ (на огневой позиции); в БМ (на огневой позиции) также измеряют топографические координаты и в обратном порядке также передают на БМ-ориентир;
при поступлении координат БМ (ориентир) в БМ (на огневой позиции) в соответствии указанными координатами, собственными координатами, предварительным азимутом продольной оси БМ, по данным с датчиков 8 (от датчика азимута) с помощью блока управления 3 наводят видеосмотровое устройство командира 10 на БМ (ориентир); корректируют положение видеосмотрового устройства 10, высчитывают и фиксируют реальный азимут между боевыми машинами; разницу азимутов реального и предварительного уточняют продольную ось БМ (на огневой позиции); вычисленный реальный азимут (с соотвествующим изменением их, эквивалентному разнице в 180° азимутов «БМ (на огневой позиции) → БМ (ориентир)» и «БМ (ориентир) → БМ (на огневой позиции)» или передают на БМ (ориентир) для уточнения ее продольной оси (при этом на БМ-ориентире аналогичные действия по наведению устройства 10 на БМ на огневой позиции, определения азимута соответствующего предварительному азимуту его продольной оси осуществляют на системе управления БМ-ориентира) или проводят автономно (по имеющимся координатам самой БМ и взаимодействующей БМ и расчет реального азимута «БМ (ориентир) → БМ (на огневой позиции)»; по разнице азимутов также корректируют данные о положении продольной оси БМ.
При решении ОЗ одной БМ, при выдвижении БМ на огневую позицию, выбирают по ходу выдвижения дополнительный ориентир (столб, вышка, угол сооружения и т.п.), делают кратковременную остановку как можно более близко к потенциальному ориентиру, с помощью системы измерения координат 11 определяют координаты ориентира, запоминают эти координаты; при достижении огневой позиции наводят видеосмотровое устройство командира 10 на дополнительно выбранный ориентир по предварительным данным продольной оси БМ и запомненным координатам дополнительного ориентира, корректируют положение видеосмотровое устройство командира 10 (доводят селектор прицела на дополнительный ориентир), вычисляют и запоминают азимут по соответстветствию с предварительным положением продольной оси БМ (по данным датчика азимута в составе датчиков системы управления 8), вычисляют азимут (считая его реальным) по координатам БМ и запомненным координатам дополнительного ориентира; по разнице указанных азимутов уточняют (корректируют) положение продольной оси БМ.
В случаях отсутствия других возможностей коррекции данных о азимуте продольной оси БМ в предлагаемой системе управления огнем может быть использована и стационарная цель с известными координатами. Коррекция данных о азимуте продольной оси БМ выполняется уже в ходе решения ОЗ. В соответствии с предварительными данными о положении продольной оси, известными (например по разведданным, переданным в БМ) координатами цели и координатами БМ прицел 10 или прицел наводчика 5 (уже в ходе выполнения стрельбы по цели) наводится на стационарную цель, вручную корректируется положение прицела до соответствующего совпадения с целью и перед вводом расчетных поправок (например, по метеоданным, включающим ветровые) фиксируется азимут до цели (азимут, определенный на предварительных данных о положения продольной оси); далее возможно и ввод поправок и выполнение выстрелов, но и дополнительное вычисление по зафиксированному азимуту и расчетному (по координатам цели и БМ) в приемлемый момент времени (например, перед переводом блока вооружения на другую цель, или, при необходимости коррекции стрельбы, перед переходом на автоматическое наведение на цель) вводится коррекция положения продольной оси БМ.
В результате реализации предлагаемых способов стрельбы боевой машины и предлагаемой системы управления огнем достигаются первичные эффекты:
- снижаются риски ошибок уточнения положения продольной оси БМ и, соответственно, уменьшаются погрешности при стрельбе из орудий БМ по видимым и невидимым целям (за счет реализации возможностей коррекции положения продольной оси БМ в условиях или отсутствия ориентиров с заранее известными координатами, или отсутствия видимости оптическими средствами БМ этих ориентиров /по погодным условиям; из-за рельефа местности; предпринятых противником действий по уничтожению видимых признаков ориентира, дымовых завес и т.д./);
- сокращается время на подготовку к проведению стрельбы БМ на огневой позиции (за счет сокращения времени оперирования координатами цели по разведданным, достигаемого исключением ручного ввода координат на пультах БМ);
- сокращается время на подготовку к проведению стрельбы БМ на огневой позиции (за счет сокращение времени на прием координат следующих целей по разведданным, достигаемого исключением ручного приема координат по голосовой связи и ручного ввода координат на пультах БМ; за счет сокращения времени на перенацеливание оружия БМ; за счет сокращение времени на перераспределение целей между взаимодействующими БМ при выполнении корректирующих воздействий по результатам стрельбы);
- сокращается время на стрельбу (за счет сокращение времени на наведения оружия на цели, достигаемого в использовании преимущественно автоматизированного наведения);
- уменьшаются погрешности при стрельбе из орудий БМ (за счет использования преимущественно автоматизированного инструментально точного наведения на цели оружия БМ).
Дополнительными эффектами от применения предлагаемых способов и системы являются:
- сокращение рисков поражения БМ на огневых позициях (за счет сокращения времени выполнения огневой задачи боевыми машинами на огневых позициях);
- сокращение рисков несанкционированных перехватов передач по голосовой связи координат атакуемых целей (за счет практического исключения таких передач данных);
- сокращение рисков несанкционированных перехватов содержания передач по голосовой связи (за счет существенного сокращения как их числа, так и продолжительности переговоров по такой связи).
Особенно актуально использование предложений в системах управления огнем БМ типа боевых машин пехоты, боевых машин десанта, танков, бронетранспортеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
| Система управления огнем боевой машины и блок управления автоматикой | 2018 |
|
RU2718186C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
| Система управления огнем боевой машины | 2020 |
|
RU2743893C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2839637C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2828680C1 |
Изобретение относится к системам вооружения и военной техники, в частности к комплексам вооружения боевых машин (БМ) пехоты, десанта, танков, бронетранспортеров и т.п. Система управления огнем включают баллистический вычислитель (1) с системой датчиков входной информации (8), в состав которой входит датчик азимута, стабилизатор вооружения (2), блок управления (3), оптико-телевизионный прицел наводчика (5), а также телетепловизионный автомат (4) сопровождения целей, пульт командира (6) и пульт оператора (7), систему измерения координат (11), в состав которой входят антенный блок, приемник и преобразователь угол-код, место командира, включающее последовательно соединенные пульт управления (9) и видеосмотровое устройство командира (10). При этом первые входы и первые выходы оптико-телевизионного прицела наводчика (5), телетепловизионного автомата (4) сопровождения целей, блока управления (3), стабилизатора (2), баллистического вычислителя (1), пульта командира (6) и пульт оператора (7) соединены с цифровым каналом связи. Четвертый вход и четвертый выход блока управления (3) соединены соответственно со вторым выходом и вторым входом телетепловизионного автомата (4) сопровождения целей. Второй выход оптико-телевизионного прицела наводчика (5) соединен с четвертым входом стабилизатора вооружения (2), третий вход которого соединен со вторым выходом пульта оператора (7). Система измерения координат (11) соединена с пятым входом блока управления (3). Третий выход блока управления (3) соединен с первым входом видеосмотрового устройства командира (10), выход которого соединен с пультом управления (9), второй выход которого соединен с третьим входом блока управления (3). Дополнительно имеется комплекс разведки управления и связи (12), реализованный как компьютер мобильного типа, первые входы и выходы которого соединены через приемник-передатчик коммуникационной системы (13) с комплексами разведки управления и связи других БМ, участвующих в решении огневой задачи, и с комплексами разведки управления и связи мобильных или стационарных командных пунктов, а вторые входы и выходы соединены через адаптер с цифровым каналом связи. Также предложен способ стрельбы БМ с использованием системы управления огнем. Обеспечивается сокращение времени на подготовку и проведение стрельбы БМ с огневых позиций по целям, находящимся как в зоне видимости оптических средств БМ, так и вне зон видимости, а также уменьшение вероятности внесения погрешностей операторами и командирами БМ при подготовке и проведении стрельбы БМ на огневых позициях. 2 н. и 4 з.п. ф-лы, 2 ил.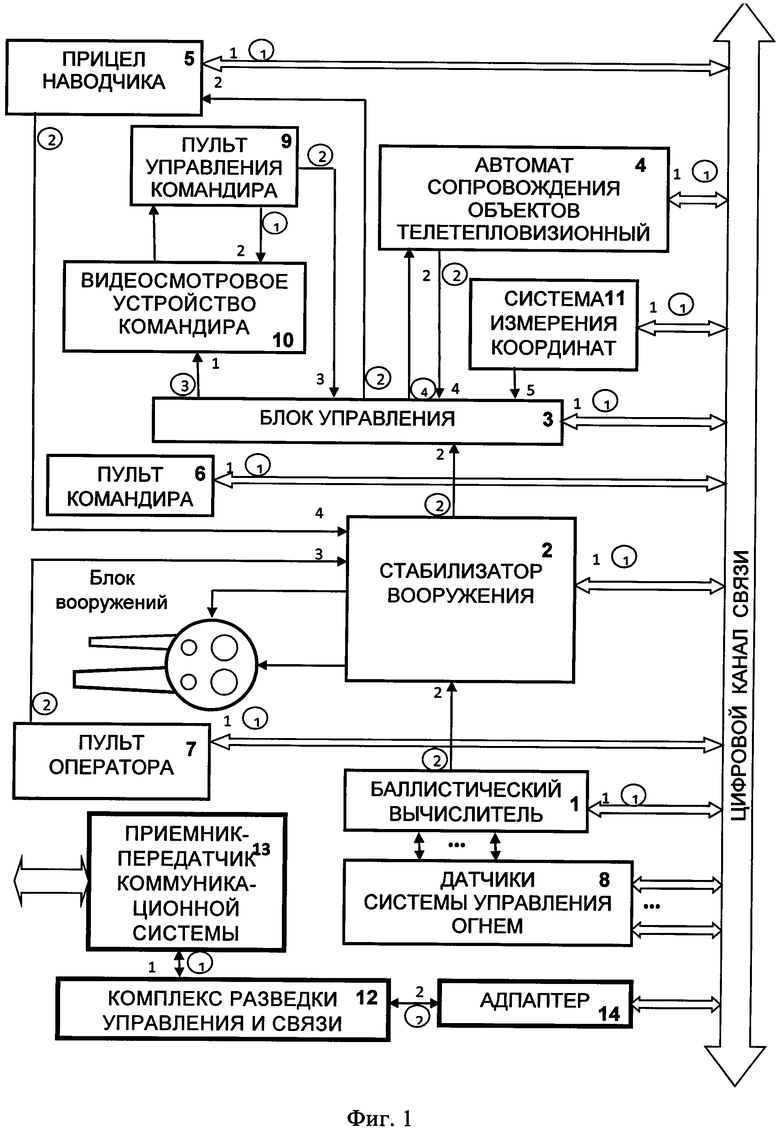
1. Способ стрельбы боевой машины, при котором обнаруживают и распознают цели, определяют топографические координаты и высоту огневой позиции боевой машины с установленным на ней орудием над уровнем моря, выбирают основное направление стрельбы, при стрельбе с закрытых позиций по ненаблюдаемой цели получают топографические координаты цели и определяют ее высоту над уровнем моря, выбирают тип снаряда, вводят поправки на отклонение условий стрельбы от табличных, на деривацию и при необходимости - поправки угла прицеливания на угол места цели, назначают на основе вычисленных данных исходные установки стрельбы и отрабатывают их относительно предварительно выбранного основного направления, вычислительные операции осуществляют с использованием блока управления и баллистического вычислителя, координаты боевой машины определяют автоматически с помощью системы измерения координат или вводят их в блок управления вручную, затем контролируют поступающие с автоматических датчиков метеоданные, координаты цели и вводят их в блок управления, исходное положение продольной оси боевой машины определяют относительно предварительно выбранного основного направления по горизонту, определенного с учетом предварительно введенных в блок управления координат ориентира, или относительно направления север-юг по горизонту с помощью датчика азимута и вводят в блок управления, определяют потребный угол разворота линии визирования на цель по горизонту и на угол места цели из-за разности высот расположения машины и цели, определяют с помощью баллистического вычислителя рассогласование положения линии визирования прицела наводчика относительно плоскости горизонта, предварительно определив положение с помощью датчика крена, передают по каналу связи потребную величину рассогласования по вертикали из баллистического вычислителя в блок управления, затем из блока управления выдают ее в автоматическую оптико-телетепловизионную систему, с помощью которой вырабатывают сигнал управления зеркалом в канале вертикального наведения, тем самым перемещают зеркало прицела наводчика по вертикали в сторону уменьшения рассогласования, а при проведении стрельбы с закрытых позиций по ненаблюдаемой цели обеспечивают слежение линии визирования прицела наводчика за линией горизонта, принимают по каналу информационного обмена от датчика поворота башни значение угла разворота башни относительно оси машины, рассчитывают величину рассогласования между положением башни по горизонту и направлением на цель, которую выдают в автоматическую оптико-телетепловизионную систему, с помощью которой вырабатывают сигнал управления зеркалом в канале горизонтального наведения, приводят таким образом к движению зеркала оптико-телевизионный прицел наводчика по горизонту в сторону уменьшения рассогласования и отрабатывают с погрешностью не более заданной рассогласование орудия относительно линии визирования по вертикальному и горизонтальному каналам, рассчитывают в блоке управления, при проведении стрельбы с закрытых позиций по ненаблюдаемой цели, дальности до цели, передают в баллистический вычислитель код дальности до цели, где определяют углы прицеливания и упреждения по вертикальному и горизонтальному наведению с учетом поправок на условия стрельбы, отрабатывают поправки стабилизатором вооружения, формируют с помощью баллистического вычислителя команду разрешения выстрела и передают ее по каналу информационного обмена в пульт оператора, где подготавливают цепи электроспуска и выполняют стрельбу по цели, отличающийся тем, что при проведении стрельбы с открытых позиций по наблюдаемой цели, перед передачей в баллистический вычислитель кода дальности до цели, дальность до цели определяют с помощью лазерного дальномера и с его же помощью, при отсутствии предварительно известных координат цели, вычисляют координаты цели, кроме того, при определении исходного положения продольной оси боевой машины, при отсутствии заранее определенного ориентира с известными координатами, в качестве ориентира с известными координатами используют взаимодействующую вторую боевую машину, также оснащенную средствами автоматического определения координат боевой машины, или выбирают в качестве такого ориентира точку при выдвижении боевой машины на огневую позицию, при прохождении которой измеряют и запоминают ее координаты с помощью средств определения координат боевой машины, или выбирают в качестве такого ориентира видимую неподвижную цель, координаты которой переданы в боевую машину как разведданные.
2. Способ по п. 1, отличающийся тем, что при определении исходного положения продольной оси боевой машины с помощью взаимодействующей второй боевой машины размещают боевые машины на огневых позициях, удаленных друг от друга на дальность, достаточную для обеспечения требуемой точности определения исходного положения продольной оси боевой машины, причем для определения положения продольных осей боевых машин последовательно или одновременно на взаимодействующих боевых машинах взаимно наводят оптико-телевизионные прицелы, задействуют лазерные дальномеры и определяют азимут относительно исходного положения продольной оси боевой машины и фактическую дальность и передают по каналу передачи цифровых данных между взаимодействующими боевыми машинами координаты боевых машин на огневых позициях.
3. Способ по п. 1, отличающийся тем, что при определении исходного положения продольной оси боевой машины с помощью дополнительной точки на трассе выдвижения боевой машины на огневую позицию такую точку выбирают на удалении от планируемой огневой позиции, достаточном для обеспечения требуемой точности определения исходного положения продольной оси боевой машины, а после выдвижения боевой машины на огневую позицию наводят оптико-телевизионный прицел на дополнительную точку, задействуют лазерный дальномер, определяют фактическую дальность, азимут и используют координаты точки, зафиксированные при выдвижении боевой машины на огневую позицию, и азимутальное измерение до точки, выполненные на огневой позиции, для определения исходного положения продольной оси боевой машины.
4. Способ по п. 1, отличающийся тем, что в автоматизированной системе управления огнем боевой машины фиксируют несколько целей с их координатами и после выполнения стрельбы по цели вводят координаты следующей цели в соответствии с ее приоритетом и выполняют автоматически цикл подготовки к стрельбе и стрельбу по следующей цели.
5. Способ по п. 4, отличающийся тем, что при участии нескольких боевых машин в решении огневой задачи перечень целей с координатами передают на все боевые машины, а их приоритетами в каждой автоматизированной системе управления огнем боевой машины указывают распределение целей по боевым машинам, причем по результатам стрельбы по целям при необходимости изменяют приоритеты, чем проводят оперативное перераспределение целей по боевым машинам.
6. Автоматизированная система управления огнем боевой машины, включающая баллистический вычислитель с системой датчиков входной информации, в состав которой входит датчик азимута, стабилизатор вооружения, блок управления, оптико-телевизионный прицел наводчика, а также телетепловизионный автомат сопровождения целей, пульт командира и пульт оператора, система измерения координат, в состав которой входят антенный блок, приемник и преобразователь угол-код, а также место командира, включающее последовательно соединенные пульт управления и видеосмотровое устройство командира, причем первые входы и первые выходы оптико-телевизионного прицела наводчика, телетепловизионного автомата сопровождения целей, блока управления, стабилизатора, баллистического вычислителя, пульта командира и пульт оператора соединены с цифровым каналом связи, четвертый вход и четвертый выход блока управления соединены соответственно со вторым выходом и вторым входом телетепловизионного автомата сопровождения целей, второй выход оптико-телевизионного прицела наводчика соединен с четвертым входом стабилизатора вооружения, третий вход которого соединен со вторым выходом пульта оператора, система измерения координат соединена с пятым входом блока управления, третий выход блока управления соединен с первым входом видеосмотрового устройства командира, выход которого соединен с пультом управления, второй выход которого соединен с третьим входом блок управления, отличающаяся тем, что в нее дополнительно введен комплекс разведки управления и связи, реализованный как компьютер мобильного типа, первые входы и выходы которого соединены через приемник-передатчик коммуникационной системы с комплексами разведки управления и связи других боевых машин, участвующими в решении огневой задачи, и с комплексами разведки управления и связи мобильных или стационарных командных пунктов, а вторые входы и выходы соединены через адаптер с цифровым каналом связи.
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| US 4494198 A, 15.01.1985 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| RU 2005127400 А, 10.03.2007. | |||

