Область техники
Изобретение относится к области радиолокационной техники, а точнее, к способам цифровой обработки сигнала, отраженного от целей и принятого радиолокатором, с целью определения числа целей, их скоростей, дальностей и амплитуд отраженных от них сигналов.
Уровень техники
Современный уровень цифровой обработки сигналов в радиолокации весьма полно описан в серии статей: Бобров Д.Ю., Доброжанский А.П., Зайцев Г.В., Маликов Ю.В., Цыпин И.Б. Цифровая обработка сигналов в многофункциональных РЛС. Часть 1: Принципы разработки. Преобразование сигнала в цифровую форму // Цифровая обработка сигналов. 2001, №4, с.2-11; Бобров Д.Ю., Доброжанский А.П., Зайцев Г.В., Маликов Ю.В., Цыпин И.Б. Цифровая обработка сигналов в многофункциональных РЛС. Часть 2: Алгоритмы обработки радиолокационных сигналов. Цифровая обработка сигналов. 2002, №1, с.28-39; Бобров Д.Ю., Доброжанский А.П., Зайцев Г.В., Маликов Ю.В., Цыпин И.Б. Цифровая обработка сигналов в многофункциональных РЛС. Часть 3: Программируемый процессор сигналов. Цифровая обработка сигналов. 2002, №2, с.42-50.
Самым предпочтительным вариантом является преобразование аналогового сигнала в цифровую форму с помощью одноканального аналогово-цифрового преобразователя (АЦП) на некоторой промежуточной частоте (ПЧ) с последующим использованием цифрового преобразователя полосы сигнала, включающего цифровой гетеродин и фильтр нижних частот с прореживанием выходных выборок. После этого дальность и скорость цели находятся путем взвешивания и оптимальной корреляционной обработки, которая состоит в сравнении принятого сигнала с образцом ожидаемого сигнала. При этом для определения дальности цели сигнал разделяется на некоторое число (до нескольких десятков) каналов дальности. Указанную обработку необходимо проводить в каждом канале дальности, что ведет к большому объему аппаратуры. Из-за разбиения тракта цифровой обработки на каналы дальности возникают так называемые "седловые потери" (вследствие неточного попадания сигнала в строб дальности), а также имеются трудности при различении целей, чьи сигналы близки (особенно когда они хотя бы частично перекрываются) по скорости и дальности. Указанный способ обработки является прототипом настоящего изобретения.
Аналогом данного изобретения является классическая аналоговая схема обработки сигнала с разделением на каналы дальности и частоты (Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981, стр.119).
Сущность изобретения
Настоящее изобретение основано на следующем фундаментальном свойстве спектра сигнала: при сдвиге сигнала во времени на некоторую величину его спектр приобретает линейный фазовый набег (относительно спектра исходного сигнала) в зависимости от частоты с крутизной, прямо пропорциональной величине сдвига. Кроме того, сигнал, отраженный от движущейся цели, сдвигается по частоте на величину доплеровского смещения частоты. Поэтому, сравнивая спектр зарегистрированного сигнала с известным образцом (спектром сигнала, отраженного от неподвижной цели с нулевой дальностью, возможно, неоднозначной), преобразованным по скорости и дальности, можно найти количество целей, их скорости, дальности и амплитуды их сигналов. При этом не требуется разбивать тракт обработки на каналы дальности.
В отличие от прототипа в настоящем изобретении сигнал на ПЧ, оцифрованный АЦП, подвергается взвешиванию и дискретному преобразованию Фурье (ДПФ) непосредственно (без предварительной обработки и разбиения на каналы дальности):

где х(n) - действительные выборки (отсчеты) принятого сигнала на выходе АЦП, n=0 соответствует нулевой дальности; W(n) - весовые множители; Sk - спектр оцифрованного принятого сигнала на частоте fk; fk - частота, принимающая дискретные значения

F0 - частота оцифровки АЦП; N0 - полное число отсчетов сигнала; NДПФ - порядок ДПФ, целое число, большее или равное N0; вычисления проводятся для целых чисел k, отвечающих области частот, прилегающей к центральной промежуточной частоте FПЧ (область "положительных" частот спектра, а область "отрицательных" частот, т.е. область, прилегающая к (F0-FПЧ), игнорируется) и в которой должна быть (если сигнал есть) сосредоточена основная часть мощности сигнала, а не только в области доплеровских частот. Наиболее очевидный выбор значения NДПФ - это подходящий размер наиболее эффективного алгоритма БПФ, превышающий N0, однако конкретная задача может потребовать иного решения (см. ниже). Если система многоканальная, то спектры всех каналов объединяются в один суммарный спектр, возможно, с применением адаптивных весов для подавления помех.
Вопросы построения тракта ПЧ, выбора частоты оцифровки и промежуточной частоты FПЧ, выбора весовых коэффициентов, вычисления ДПФ, адаптации и т.д. здесь не рассматриваются, поскольку они решаются в соответствии с современным уровнем техники (см., например, литературу, цитированную выше, и Хэррис Ф.Дж. Использование окон при гармоническом анализе методом дискретного преобразования Фурье. ТИИЭР, т.66, 1978, №1, с.60-96; М.В.Ратынский. Адаптация и сверхразрешение в антенных решетках. М.: Радио и связь, 2003).
В прототипе применяется так называемый цифровой гетеродин (умножение входного сигнала на экспоненту ехр(-j2πnFПЧt)), который сдвигает спектр на величину FПЧ влево. В данном изобретении авторы отказались от цифрового гетеродина по следующей причине. Дело в том, что в цифровой системе в отличие от аналоговой можно работать непосредственно с интересующим участком спектра без переноса его в область низких частот. Отдавая дань традиции, здесь также можно применить цифровой гетеродин (с соответствующим переносом области анализа в область низких частот, см. ниже), однако численная реализация ДПФ при этом оказывается менее эффективной.
Окончательно количество целей NЦ, их радиальные скорости νn, дальности Rn (возможно, неоднозначные) и комплексные амплитуды их ответных сигналов bn (n=1, …, NЦ) находятся путем поиска решений следующей системы уравнений:

где νn=-λfдоплер n/2; Sобразец(f) - известный спектр, рассчитанный по формуле (1) для сигнала, пришедшего от цели, находящейся на нулевой дальности и движущейся с нулевой скоростью, или его модели; fдоплер n - доплеровский сдвиг частоты сигнала, отраженного от цели номер n; целое число k принимает значения, соответствующие тем "положительным" частотам спектра и на которых сосредоточен спектр сигнала искомых целей для данных частот fдоплер n; λ - длина волны несущей высокочастотной волны и с - скорость света; при этом цель считается найденной, если модуль bn превышает установленный порог над шумом.
При реализации вычислений удобно записать систему уравнений (3) в виде

это приведет лишь к изменению рассчитанной фазы комплексной амплитуды bn (что несущественно), но значительно уменьшит аргумент экспоненты, положительно сказываясь на точности вычислений.
Система уравнений (3) решается численно с применением одного из известных математических методов, например метода сопряженных градиентов. При наличии шумов и ошибок измерения находим наилучшее приближенное решение, например, в смысле минимума среднеквадратической ошибки.
Если области спектра, соответствующие разным целям, перекрываются, уравнения для этих целей получаются связанными и решаются совместно, чем достигается высокое разрешение целей. Если эти области для некоторой цели (целей) не перекрываются с областями других целей (на достаточно низком уровне), то уравнения для этой цели (целей) независимы от других, то есть система уравнений (3) распадается на независимые системы уравнений, которые могут решаться отдельно (то есть порядок решаемой системы уменьшается и время решения сокращается).
В моноимпульсной системе по вышеописанной схеме строятся суммарный и все разностные каналы, причем спектр в разностных каналах можно рассчитывать только в тех областях, где найдены цели в суммарном канале.
После этого результаты передаются на устройство определения угловых координат и вторичную обработку, что лежит вне рамок данного изобретения.
Данное изобретение направлено на повышение точности определения дальностей, скоростей целей и амплитуд отраженных от них сигналов, улучшение разрешения целей, повышение потенциала РЛС и уменьшение объема аппаратуры.
Для иллюстрации работы данного способа цифровой обработки рассмотрим его на примере квазинепрерывного сигнала с высокой частотой повторения (пачка когерентных радиоимпульсов). Для пачки с линейной частотной модуляцией процедура такая же.
После перенесения на ПЧ этот сигнал можно рассматривать как вырезку из непрерывной синусоиды (с частотой, равной центральной промежуточной частоте FПЧ плюс доплеровский сдвиг fдоплер), последовательностью из М видеоимпульсов (которые для начала считаем прямоугольными), следующих с частотой повторения импульсов (ЧПИ) Fповт=1/Tповт и скважностью Q; длительность импульса τ=Tповт/Q. Этот сигнал превращается с помощью АЦП в последовательность действительных отсчетов, следующих с частотой оцифровки F0, при этом на один импульс пачки приходится J=τF0 отсчетов. Поскольку система цифровая, частота повторения импульсов в пачке кратна частоте оцифровки: Fповт=F0/K, где K - целое число, коэффициент деления, равный числу отсчетов в одном периоде следования импульсов.
Рассмотрим спектр этого сигнала, для чего последовательно проанализируем его составляющие:
а. Самая элементарная составляющая сигнала - это прямоугольный видеоимпульс, его спектр - функция
SВИ(f)=sin(2πfτ/2)/(2πfτ/2).
б. Пачка М видеоимпульсов. Ее спектр равен произведению спектра одного видеоимпульса на "множитель группирования" - спектр пачки М единичных δ-импульсов, следующих с периодом Тповт. Множитель группирования представляет собой периодическую функцию с периодом Fповт и ярко выраженным максимумом в начале координат, который периодически повторяется с периодом Fповт. Если все импульсы пачки имеют одинаковую амплитуду (все весовые множители равны единице), то множитель группирования имеет вид
sin(2πfNTповт/2)/sin(2πfTповт/2),
а спектр всей пачки видеоимпульсов есть

Огибающей этой функции является спектр одного видеоимпульса, а вписанные в нее максимумы множителя группирования следуют с периодом Fповт - именно эти области максимумов в пределах главного лепестка видеоимпульса и, возможно, ближайших его боковых лепестков содержат основную часть энергии сигнала и будут использованы при решении системы уравнений (3). В пределах главного лепестка огибающей помещается 2Q интервалов длиной Fповт (если модулирующий видеоимпульс не прямоугольный, а спадающий к краям, то главный лепесток его спектра расширяется и в него входит большее число таких интервалов). Если к пачке видеоимпульсов применена спадающая к ее краям весовая функция, то ее спектр изменяется известным образом: главный лепесток множителя группирования расширяется, а его боковые лепестки (как первые, так и дальние) понижаются, при этом множитель группирования всегда остается периодической функцией с периодом Fповт и максимумом в начале координат. Вес на пачку (например Wp=sin3(π(р-0.5)/М), где р=1, …, N - номер импульса в пачке) накладывается следующим образом: на весовой множитель Wp умножаются все отсчеты принятого сигнала х(n) попадающие в интервал номеров n от (р-1)К до (рК-1).
в. Спектр синусоиды с частотой (FПЧ+fдоплер) - это двe дельта-функции на частотах (FПЧ+fдоплер) и -(FПЧ+fдоплер).
г. Спектр пачки радиоимпульсов равен свертке спектров пачки видеоимпульсов и синусоиды. То есть это две копии спектра пачки видеоимпульсов, перенесенные на частоты (FПЧ+fдоплер) и -(FПЧ+fдоплер).
д. Спектр оцифрованной пачки радиоимпульсов - это спектр исходной пачки, повторенный периодически бесконечное число раз с периодом F0, то есть

Дальние лепестки паразитных размноженных спектров в формуле (6) убывают довольно медленно (их огибающая - спектр одного видеоимпульса). Это явление вызывает наложение спектров в рабочей области частот и, следовательно, искажает полезный сигнал. Для уменьшения его влияния применяют известный метод: выбирают подходящую частоту дискретизации и соотношение между ней и промежуточной частотой. В рамках настоящего изобретения можно также применять видеоимпульсы со спадающей огибающей, у которых быстро спадают дальние лепестки спектра.
При правильно выбранных параметрах сигнала наложение спектров незначительно. Поэтому пренебрегаем им и выбираем в качестве образца спектра Sобразец(f) функцию SпачкаВИ (f-FПЧ) (если, тем не менее, наложение спектров проявляется заметно, то эти составляющие тоже необходимо включить в образец). Области частот, для которых в данном случае записывается система (3), это участки, прилегающие к главным максимумам спектра образца, которые следуют с периодом Fповт.
Здесь для того, чтобы сделать спектр образца для удобства действительным, авторы фактически сдвинули начало координат во временной области в середину пачки, пришедшей с нулевой дальности. Поэтому необходимо соответственно сдвинуть последовательность, подвергаемую ДПФ (в квадратных скобках в формуле (1)) влево на ((М-1)К+(J-1))/(2F0). Для этого сдвигаем эту последовательность циклически на [(М-1)К+(J-1)]/2 позиций влево (квадратные скобки здесь обозначают операцию взятия целой части числа) и еще на 1/(2F0) вправо с помощью теоремы о сдвиге при вычислении ДПФ в (1), если величина в квадратных скобках четная. При этом если М четно, то решение системы уравнений (3) получается сдвинутым на половину периода неоднозначной дальности, что учитывается при окончательной записи решения уравнений (3). Эти действия подразумеваются, когда говорится о вычислениях по формуле (1) для квазинепрерывного сигнала.
Если выбрать размер ДПФ равным NДПФ=КМ' (где М' - целое число, равное степени числа 2 и большее М), то появится возможность применения алгоритма БПФ при расчете ДПФ по формуле (1) (где все отсчеты при n≥N0 полагаются равными нулю), и в то же время на периоде Fповт уместится ровно целое число М' дискретов частоты Δf=f0/NДПФ (то есть указанные выше области спектра, на которых записана система (3), будут периодическими не только по частоте, но и по индексу k). Частоты fk в формуле (1) оказываются расположенными регулярно в указанных областях, так что их можно занумеровать двумя индексами. Тогда система (3) может быть записана в виде

Здесь дискретная частота fmk принимает значения только в указанных выше областях, соответствующих каждой одиночной цели (или группе целей, близких по скорости) в каждом периоде ЧПИ: fmk=mFповт+kF0/NДПФ, где индекс m обозначает номер периода, k - номер отсчета внутри области; Smk - значения спектра, рассчитанные на частотах fmk. Смысл такого выбора числа NДПФ будет показан ниже.
При вычислении ДПФ (1) возможны различные способы построения эффективного алгоритма. В частности, при оптимальном выборе соотношения между F0 и FПЧ (например, F0=4FПЧ/3, см. Бобров Д.Ю., Доброжанский А.П., Зайцев Г.В., Маликов Ю.В., Цыпин И.Б. Цифровая обработка сигналов в многофункциональных РЛС. Часть 1: Принципы разработки. Преобразование сигнала в цифровую форму // Цифровая обработка сигналов. 2001, №4, с.2-11) расстояния между областью режекции (область малых доплеровских частот) и всеми ее копиями (см. формулу (6)) кратны F0/2. Поэтому для того, чтобы все периодические повторения области пассивных помех попали в область режекции и ее периодические повторения, число К следует выбирать четным. Тогда последовательность взвешенных выборок сигнала [W(n)×(n)] в формуле (1) можно представить как К/2 вложенных последовательностей длины 2 М', вычислить вклад каждой такой последовательности с помощью алгоритма БПФ и результаты сложить с учетом сдвига этих последовательностей во времени. Таким образом, получаем весьма эффективный алгоритм, с помощью которого к тому же можно вычислять ДПФ не во всем интервале от 0 до F0, а только в интересующей нас области. Заметим, что, в принципе, можно выбрать NДПФ равным подходящему размеру доступного алгоритма БПФ, например, минимальной целой степени двойки, превышающему N0. При этом мы получаем возможность применения эффективного алгоритма БПФ на полную длину сигнала, но спектр придется рассчитывать во всех NДПФ точках и, кроме того, на отрезке длиной Fповт в общем случае не будет укладываться целое число дискретов частоты и поэтому нельзя будет воспользоваться способом определения начального приближения, изложенным ниже.
На фиг.1 показан спектр отклика на три цели в одном зондировании, рассчитанный с помощью математической модели. Цели движутся со скоростями V1=-700 м/с, V2=-700 м/с и V3=-500 м/с и находятся на неоднозначных дальностях 0.27 RН, 0.54 RH и 0.79 RH, где RH=с/(2Fповт) - период неоднозначной дальности. Спектр показан на интервале FПЧ±5Fповт (нулевой индекс соответствует FПЧ). Амплитуда собственного шума 0 дБ, амплитуда импульса пачки от каждой цели +10 дБ, АЦП содержит 14 разрядов (включая знак), и на дисперсию шума приходится 2 разряда. Параметры пачки следующие: длительность 4 мс, скважность 5, длина волны несущей 3 см, темп оцифровки F0=80 МГц, частота повторения импульсов в пачке равна F0/726, промежуточная частота 60 МГц, импульсы прямоугольные, вес на пачку - "синус в кубе". Для наглядности, область режекции и ее повторения с периодом Fповт выбраны широкими (±10 кГц). Первые две цели совпадают по скорости, а цель номер 3 хорошо отделена от них. Поэтому на фиг.1 мы видим две системы пиков (каждый пик занимает 5-7 частотных точек). Левые пики в каждой паре соответствуют только одной третьей цели (ее доплер меньше), и поэтому их амплитуда отслеживает амплитуду спектра видеоимпульса. Правые пики соответствуют первым двум целям, их вклады складываются в различных фазах и могут даже взаимно компенсироваться; поэтому амплитуда этих пиков носит нерегулярный характер. Форма таких областей спектра тоже может меняться в зависимости от количества перекрывающихся областей и степени их перекрытия. Согласно настоящему изобретению при решении системы (3) или (7) необходимо рассчитать спектр по формуле (1) в области, заведомо содержащей подавляющую часть энергии сигнала (в данном случае это область внутри главного лепестка спектра видеоимпульса, сдвинутого на FПЧ, плюс, возможно, его ближайшие боковые лепестки), выделить в этой области последовательность подобластей спектра, следующих с периодом Fповт, которая предположительно содержит цель, и решить систему уравнений (3) или (7) для данных из этих подобластей, определив в результате количество целей в них и оценки их параметров. Затем следует перейти к поиску целей в следующей системе периодических подобластей и так до исчерпания всего спектра.
Заметим, что если цель одиночная или хорошо отделена от других целей по частоте, а отношение сигнал/шум велико, то из формулы (3) следует, что по разности фаз Δφ двух последующих пиков спектра можно вычислить значение дальности:

а скорость приближенно находится по доплеру обычным образом:

где λ - длина волны зондирующего сигнала и FЦ - положение максимума спектра. Крутизна характеристики (8) по фазе довольно высока: при изменении дальности от нуля до интервала неоднозначности RH=с/(2Fповт) разность фаз двух соседних пиков изменяется на 2π.
Однако, если необходимо достичь максимальной точности определения дальности, возможной в этой системе, следует анализировать фазы всех пиков, следующих с периодом Fповт и превышающих порог, но еще лучше полностью решать систему (3) или (7).
При численном решении системы нелинейных уравнений исключительно важное влияние на эффективность вычислительной процедуры оказывает правильный выбор области поиска и начального приближения. Чтобы получить представление о количестве целей, их скоростях и дальностях, введем в рассмотрение функцию

где r=R/RH - отношение дальности к периоду неоднозначной дальности, Fk=kF0/NДПФ - дискретная частота в области доплеровских частот искомых целей и * обозначает комплексное сопряжение. Выразив Fk через скорость по формуле (9), можно рассматривать эту функцию в зависимости от дальности и скорости.
Вычисление функции W по сути есть приближенное выделение компонентов сигнала из спектра - ситуация аналогична поиску цели в пространстве при осмотре его лучом антенны. Если цель одна или же она хорошо отделена от других по скорости или дальности, то максимумы этой функции с высокой точностью указывают число целей, их скорости, дальности и амплитуды сигналов. Иначе, если цель приближается к другим целям по скорости и дальности, соответствующий ей максимум функции W смещается относительно истинного положения цели и даже может полностью слиться с другими максимумами. Эту функцию можно рассматривать как аналог традиционной матрицы дальность-скорость, только она значительно точнее (без нарезки на каналы дальности) указывает дальность цели, поэтому будем называть ее функцией дальность-скорость (ДС). Используя максимумы функции ДС при формировании начального приближения и величины области поиска, можно значительно ускорить поиск решения системы уравнений (7), однако для того, чтобы ввести эту функцию, размер ДПФ должен быть кратен К. После расчета функции ДС можно прицельно решать систему уравнений (7), используя области спектра, соответствующие горбам функции ДС, превышающим порог. Вычисления по формуле (10) удобно проводить с помощью алгоритма БПФ.
На фиг.2а показан фрагмент функции ДС, рассчитанный по областям спектра, отвечающим первым двум целям предыдущего примера (по правой системе пиков на фиг.1) и построенный в координатах скорость (в м/с) - относительная дальность (неоднозначная дальность, нормированная на период неоднозначности), на фиг.2б - для третьей цели (по левой системе пиков на фиг.1). Результат численного решения системы (7) с начальными данными, отвечающими максимумам функции ДС, дал следующие оценки:
Nц=3, 
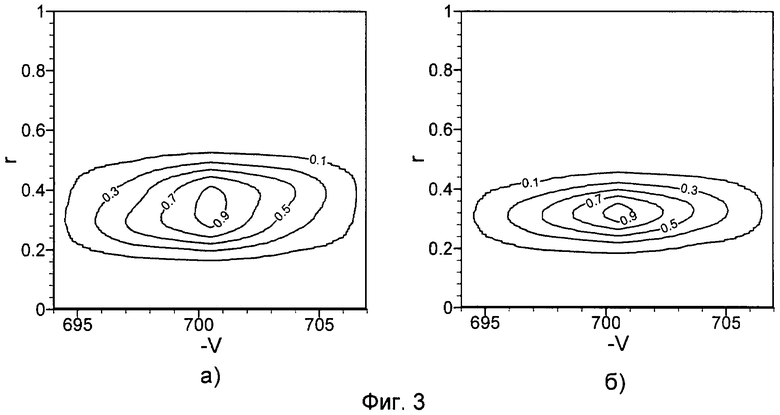
На фиг.3а показан фрагмент функции ДС для двух целей, которые движутся со скоростями V1=-700 м/с и V2=-701 м/с и находятся на неоднозначных дальностях 0.27 RH и 0.42 RH (то есть они перекрываются по дальности на 1/4 длины импульса), остальные параметры, как для фиг.1. Решение системы (7) дало оценки: 
На фиг.3б показан фрагмент функции ДС для двух целей, которые движутся со скоростями V1=-700 м/с и V2=-701 м/с и находятся на неоднозначных дальностях 0.27 RH и 0.37 RH (то есть они перекрываются по дальности на 1/2 длины импульса), остальные параметры, как для фиг.1. Решение системы (7) дало оценки: 
Видно, что во всех примерах цели опознаны с высокой точностью: не хуже 0.02 дискрета по скорости и 0.0025RH по дальности, в том числе для целей, близких друг к другу. При практической реализации, возможно, потребуется учесть отличие формы реального импульса от идеальной, чтобы устранить этот источник ошибки.
Заметим, что, несмотря на то что шумы со всех дальностей проектируются в формуле (1) на одну ось частот, помехоустойчивость данного способа цифровой обработки сигнала не только не понижается, но даже повышается по сравнению с прототипом. Дело в том, что процедуры поиска начального приближения (10) и различения целей (3) и (7) возвращают отклики назад по своим дальностям, а также отсутствуют "седловые" потери. То есть новая схема в отличие от традиционной использует всю энергию сигнала (это обеспечивает более высокую точность определения параметров цели).
За счет отсутствия стробов дальности в новой системе становится возможным применять в пачках радиоимпульсы со спадающей к краям огибающей; при этом для обработки необходимо использовать в качестве функции SВИ(f) в формулах (3)-(5) и (7) спектр именно этого импульса. Это приводит к снижению дальних боковых лепестков спектра импульса и, следовательно, к уменьшению уровня паразитных компонент спектра, возникших за счет оцифровки, в рабочей области.
Таким образом, настоящее изобретение имеет следующие преимущества над прототипом.
1. Устройство, реализующее данный способ обработки, работает в одном и том же режиме (по одному и тому же алгоритму) независимо от того, обнаруживает система цель (цели) или сопровождает ее (их). При этом из принятого сигнала выделяется информация обо всех целях в данном зондировании, так что и при сопровождении появляется возможность получать полную информацию о нескольких целях в одном зондировании.
2. За счет отсутствия каналов дальности и применения математической процедуры определения параметров целей путем сравнения с образцом обеспечивается максимально высокая точность определения дальности и скорости целей и амплитуд их ответных сигналов, а также повышается разрешение близких целей и уменьшается объем аппаратуры, что особенно важно для многоканальной системы.
3. Энергия принятого сигнала используется полностью, что повышает потенциал РЛС.
Перечень чертежей
Фиг.1. Спектр сигнала, отраженного от трех целей, две из которых имеют близкие скорости.
Фиг.2. Функция дальность-скорость для целей на Фиг.1.
Фиг.3. Функция дальность-скорость для целей, близких по скорости и дальности.
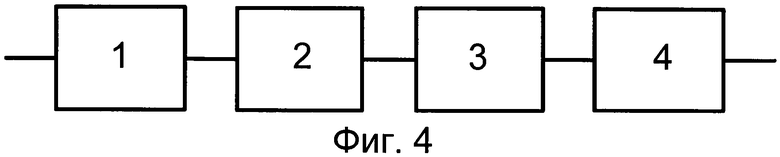
Фиг.4. Схема предпочтительной реализации.
Сведения, подтверждающие возможность осуществления изобретения
Схема предпочтительной реализации данного изобретения показана на фиг.4. Принятый радиолокационный сигнал на промежуточной частоте поступает на вход АЦП 1. Отсчеты оцифрованного сигнала поступают с выхода АЦП на вход вычислителя 2, который осуществляет взвешивание отсчетов, и затем на устройство 3, вычисляющее дискретное преобразование Фурье. Устройства 2 и 3 осуществляют вычисления по формуле (1). Результат поступает на вычислитель 4, который находит количество и параметры целей путем решения системы (3).
При реализации вычислений в устройстве 3 возможно применение различных приемов повышения эффективности вычисления БПФ.
В моноимпульсной системе по этой схеме построены суммарный и все разностные каналы, а взаимодействие между ними осуществляется традиционными способами.
В многоканальной системе каждый канал системы содержит блоки 1-3. Затем выходные спектры каналов поступают, с одной стороны, на устройство определения углов целей (вопросы измерения углов в многоканальной системе не обсуждаются, поскольку они выходят за рамки данного изобретения), с другой стороны, в суммарный канал, где они объединяются, возможно, с применением адаптации, и после этого суммарный спектр поступает на вычислитель 4.
Возможно внесение незначительных изменений в эту структуру обработки, направленных на оптимизацию вычислений и потоков данных, в рамках основных положений данного изобретения.
Средства для реализации данного изобретения те же, что и для прототипа. Серийно выпускаются высокопроизводительные АЦП и процессоры. Для повышения скорости вычислений возможно применение высокопроизводительных программируемых логических интегральных схем (ПЛИС). Таким образом, можно реализовать обработку в реальном времени.
Изобретение относится к области радиолокационной техники, а точнее, к способам цифровой обработки сигнала, отраженного от целей и принятого радиолокатором. Достигаемый технический результат изобретения - повышение точности определения дальностей, скоростей целей и амплитуд отраженных от них сигналов, улучшение разрешения целей, повышение потенциала радиолокационной станции и уменьшение объема аппаратуры. Сущность изобретения заключается в том, что, сравнивая спектр зарегистрированного отраженного от движущейся цели сигнала с известным образцом - спектром сигнала, отраженного от неподвижной цели, преобразованным по скорости и дальности, определяют количество целей, их скорости, дальности и амплитуды их сигналов, при этом не требуется разбивать тракт обработки на каналы дальности. 6 ил.
Способ определения количества, скорости и дальности целей и амплитуд отраженных от них сигналов по ответному сигналу в цифровом канале радиолокатора, отличающийся тем, что ответный радиолокационный сигнал на промежуточной частоте, оцифрованный аналогово-цифровым преобразователем (АЦП), подвергается весовой обработке и дискретному преобразованию Фурье (ДПФ):

где x(n) - действительные отсчеты принятого сигнала на выходе АЦП и n=0 соответствует нулевой дальности, W(n) - весовые множители, N0 - полное число отсчетов сигнала, Sk - спектр оцифрованного принятого сигнала на частоте fk, fk - дискретная частота
fk=kF0/NДПФ,
F0 - частота оцифровки АЦП, NДПФ - целое число, большее или равное N0, и целое число k принимает значения, отвечающие области частот, прилегающих к центральной промежуточной частоте Fпч, являющейся областью "положительных" частот спектра, и в которой сосредоточена основная часть мощности сигнала; после этого количество целей NЦ, их радиальные скорости νn, дальности Rn и комплексные амплитуды их ответных сигналов bn (n=1, …, Nц) определяются путем решения следующей системы уравнений:
 ,
,
где Sобразец(f) - известный спектр сигнала, рассчитанный по формуле (А) для сигнала, пришедшего от цели, находящейся на нулевой дальности и движущейся с нулевой скоростью, или его модели; fдоплер n - доплеровский сдвиг частоты для цели номер n; причем радиальные скорости целей νn определяются как νn=-λfдоплер n/2; целое число k принимает значения, соответствующие тем "положительным частотам", на которых сосредоточен спектр сигнала искомых целей для данных частот fдоплер n; λ - длина волны несущей высокочастотной волны и с - скорость света; при этом цель считается найденной, если модуль числа bn превышает установленный порог над шумом.
| ШИРМАН Я.Д., МАНЖОС В.Н | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| - М.: Радио и связь, 1981, с.119 | |||
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| МНОГОКАНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2316021C2 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОСИГНАЛОВ | 2003 |
|
RU2231118C1 |
| Способ получения керамических масс и изделий | 1949 |
|
SU78331A2 |
| WO 2009137441 A1, 12.11.2009 | |||
| US 5909675 A, 01.06.1999 | |||
| US 7376247 B2, 20.05.2008 | |||
| US 4338604 A, 06.07.1982. | |||

