Изобретение относится к радиолокации и может быть использовано в радиолокационной технике, в системах обработки первичной радиолокационной информации, для обнаружения сверхманевренной цели в импульсно-доплеровских радиолокационных станциях (ИД РЛС), работающих в режимах с высокой частотой повторения импульсов (ЧПИ), средней ЧПИ, низкой ЧПИ.
В ИД РЛС цели облучаются сигналами, представляющими собой пачки радиоимпульсов, излучаемые с определенной частотой повторения. При отражении от движущейся воздушной цели несущая частота радиоимпульсов сдвигается на доплеровскую частоту в большую или меньшую сторону в зависимости от направления движения цели относительно РЛС. В режиме однозначного измерения скорости цели частота повторения радиоимпульсов выбирается из условия необходимого превышения возможных величин доплеровских частот. При отражении от сверхманевренной цели, имеющей радиальное ускорение, радиоимпульсы преобразуются в дискретные выборки линейно-частотно-модулированного (ЛЧМ) сигнала.
Известен способ обнаружения сигналов, отраженных от маневрирующей цели (аналог) [1], заключающийся в том, что осуществляют аналого-цифровое преобразование (АЦП) сигнала, осуществляют панорамную развертку по частоте и по производной частоты, и последующему накоплению отсчетов в матричном фильтре. Недостатком способа является значительные вычислительные ресурсы на реализацию.
Из [2] известен способ обнаружения сигналов, отраженных от маневрирующей цели (аналог), заключающийся в разбиении сигнальной выборки на ряд коротких выборок, вычислении корреляционных сумм в узлах сетки гексагонального типа и сравнении их с порогом обнаружения. Недостатком этого способа является значительное число затрачиваемых вычислительных ресурсов на реализацию и, кроме того, сильная зависимость выигрыша в вычислительных операциях от числа каналов по скорости и ускорению (при увеличении числа каналов по скорости и ускорению, то есть увеличении разрешающей способности по частоте и по производной частоты, выигрыш в вычислительных операциях существенно снижается). Например, при N=1024, Nν=800, M=20, S=8 (где N - число импульсов в зондирующем сигнале, Nν - число каналов по скорости, М - число каналов по ускорению, S - длина сегмента БПФ [2]) выигрыш в сравнении с оптимальным способом составляет 2,5 раза, при N=1024, Nν=1024, М=60, S=8 - выигрыш 1,9 раз.
Известен способ обнаружения сигналов, отраженных от маневрирующей цели (прототип) [3], заключающийся в том, что осуществляют АЦП сигнала, вычисляют корреляционные суммы выборки сигнала и опорных комплексных линейно-частотно-модулированных сигналов, фазы действительной и мнимой частей которых сдвинуты на девяносто градусов, в узлах сетки, покрывающей область априорных значений частоты сигнала и ее производной, определяют максимум модуля корреляционной суммы по узлам сетки, сравнивают значение максимума модуля корреляционной суммы с порогом, при этом корреляционные суммы вычисляют в узлах прямоугольной сетки (fc, fj', где c=0...N-1; j=0...N2-1; fc=c/(NT) - частота опорного сигнала в узлах с индексом с, fj'=2j/(NT)2 - производная частоты опорного сигнала в узлах с индексом j; Т - период повторения зондирующих импульсов излучаемого пачечного сигнала; N - число импульсов в пачке зондирующего сигнала) путем умножения сигнальных отсчетов на фазовращающие множители, соответствующие значению производной частоты fj', и применения быстрого преобразования Фурье (БПФ), вычисляющего значения корреляционной суммы во всех узлах с одинаковым индексом j.
Недостатком данного способа является его узкий диапазон применения, т.к. невозможно его реализовать для широких областей измеряемых параметров частоты и ее производной ввиду резкого увеличения числа каналов обработки сигнала, что практически полностью не позволяет использовать данный способ на практике.
Известно, что межпериодный набег фазы сигнала за счет скорости и доплеровская частота сигнала однозначно связаны соотношением ϕC=2πfсТ, где ϕC - межпериодный набег фазы сигнала за счет скорости; fc - доплеровская частота сигнала; Т - период излучения импульсов в пачке. Межпериодный набег фазы сигнала за счет ускорения и скорость изменения доплеровской частоты сигнала fc' также связаны однозначной зависимостью: ϕc'=2πfc'T2, где ϕc' - межпериодный набег фазы сигнала за счет ускорения; fc' - скорость изменения доплеровской частоты сигнала; Т - период излучения импульсов в пачке.
Технический результат - снижение вычислительных затрат при обнаружении сигналов, отраженных от маневрирующей цели, при обеспечении высокой разрешающей способности по скорости и ускорению цели достигается тем, что каждый элемент выборки сигнала после аналого-цифрового преобразования задерживается на период излучения импульсов в пачке T, мнимую часть задержанного отсчета выборки сигнала инвертируют, умножают задержанный элемент выборки сигнала на следующий элемент выборки сигнала, осуществляют вычисление достаточных статистик в узлах сетки, покрывающей область параметра ускорения, по формуле

где Xj=Sj+1S* j,  (j=0, 1,..., N-2), ϕ'cmax=2πf'cmaxT2,
(j=0, 1,..., N-2), ϕ'cmax=2πf'cmaxT2,

f'cmax - максимальная скорость изменения доплеровской частоты сигнала; ϕ'cmax - межпериодный набег фазы сигнала за счет ускорения, соответствующий максимальной скорости изменения доплеровской частоты сигнала; armax - максимальное радиальное ускорение цели; λ - длина волны излучения РЛС; Δаr - заданная разрешающая способность по ускорению;  - настройка m-го канала по ускорению; N - число импульсов в пачке зондирующего сигнала; i - общепринятое обозначение мнимой единицы; М - число каналов по ускорению; ξ0 - порог обнаружения, выбираемый исходя из требуемой вероятности ложной тревоги, при превышении порога принимается решение об обнаружении маневрирующей цели;
- настройка m-го канала по ускорению; N - число импульсов в пачке зондирующего сигнала; i - общепринятое обозначение мнимой единицы; М - число каналов по ускорению; ξ0 - порог обнаружения, выбираемый исходя из требуемой вероятности ложной тревоги, при превышении порога принимается решение об обнаружении маневрирующей цели;  - максимально правдоподобная оценка межпериодного набега фазы сигнала за счет скорости в m-м канале по ускорению, определяемая по правилу
- максимально правдоподобная оценка межпериодного набега фазы сигнала за счет скорости в m-м канале по ускорению, определяемая по правилу

 sgn - знак числа; Im() - мнимая часть комплексного числа; Re() - действительная часть комплексного числа; arctg() - арктангенс; Xj - j-й элемент выборки {X}; * - знак комплексного сопряжения; А - комплексный коэффициент:
sgn - знак числа; Im() - мнимая часть комплексного числа; Re() - действительная часть комплексного числа; arctg() - арктангенс; Xj - j-й элемент выборки {X}; * - знак комплексного сопряжения; А - комплексный коэффициент:  ; W - комплексный коэффициент
; W - комплексный коэффициент  . Вычисление по формуле (1) осуществляется следующим образом:
. Вычисление по формуле (1) осуществляется следующим образом:
1) Хранящиеся в БР отсчеты Xj (j=0, 1,..., N-2) поэлементно умножают на фазовращающие множители:

где Xj=Sj+1S* j,  ,(j=0, 1,...,N-2),
,(j=0, 1,...,N-2), 
 Sj - j-й элемент выборки сигнала {S}, k=0, 1,..., N-2.
Sj - j-й элемент выборки сигнала {S}, k=0, 1,..., N-2.
Диапазон однозначного измерения радиального ускорения цели [1] при зондировании пространства пачкой когерентных радиоимпульсов составляет [-1/T2; 1/T2]. Определим значение первого слепого ускорения: аr=λ/(2T2): при типовом для ИД РЛС с высокой частотой повторения импульсов периоде Т=10-4 с, λ=0.03 м, первое слепое ускорение составляет 1.5·106 м/с2, что значительно превосходит маневренные возможности современных летательных аппаратов, следовательно, анализировать весь диапазон однозначного измерения ускорения не имеет смысла.
2) Дополняют последовательность комплексных отсчетов Yj=Xjzj (j=0, 1,..., N-2) нулями до N+M-2, где М - число каналов по ускорению.
Отметим, что значения фазовращающих множителей zj вычисляются заранее и хранятся в ПЗУ процессора обработки.
3) Вычисляют отсчеты ДПФ комплексных отсчетов Gj (j=0, 1,..., N+М-2) последовательности {G} по методу БПФ:

где k=0, 1,..., N+M-2.
4) Умножают поэлементно отсчеты Gk на отсчеты Vk (k=0, 1,..., N+M-2). Отсчеты Vk есть результат ДПФ над последовательностью νk (i=0, 1,..., N+М-2). Последовательность νi формируется по правилу
 если j изменяется от 0 до М-1 включительно;
если j изменяется от 0 до М-1 включительно;
 если j изменяется от М до N+M-2.
если j изменяется от М до N+M-2.
Отметим, что последовательность Vk (k=0, 1,..., N+М-2) также можно вычислить заранее и хранить в ПЗУ процессора.
5) Вычисляют отсчеты gl (l=0, 1,..., N+M-2) обратного ДПФ по методу БПФ отсчетов Fk=GkVk (k=0, 1,..., N+М-2). Отсчеты gl при l больше или равно М не имеют смысла и отбрасываются.
6) Умножают поэлементно отсчеты gm на элементы последовательности

Отметим, что элементы последовательности  (m=0, 1,..., M-1) также вычисляются заранее и хранятся в ПЗУ.
(m=0, 1,..., M-1) также вычисляются заранее и хранятся в ПЗУ.
9) Каждый из комплексных отсчетов Um подвергается функциональному преобразованию (ФП) по правилу (2), с расширенным диапазоном значений арктангенса. По превышении модулем величины Um порога обнаружения принимается решение об обнаружении цели с ускорением, соответствующим m-му каналу по ускорению и оценкой скорости, вычисленной по правилу (2). Правило (2) вычисляется табличным методом на основе постоянного запоминающего устройства (ПЗУ), в которое предварительно записываются числовые значения функции (в данном случае функции двух аргументов sin(•) и cos(•)) по адресам, соответствующим значениям аргументов функции.
Новыми признаками заявляемого способа, которые обладают существенными отличиями от способа-прототипа, являются следующие:
1) Получение из сигнальной входной выборки последовательности мультипликаций (в соответствии с пунктом 1);
2) Использование при вычислении выражения (1) метода ЛЧМ-фильтрации [4, стр.435];
3) Получение одноканальной максимально правдоподобной оценки доплеровского набега фазы сигнала за счет скорости в каждом канале по ускорению.
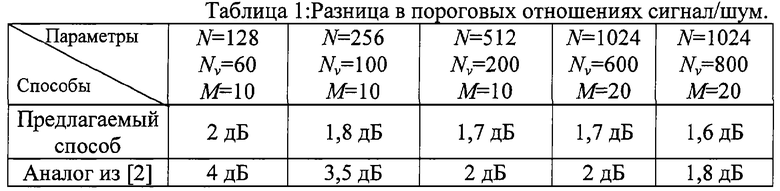
Рассмотрим показатель эффективности заявляемого способа, способа-прототипа [3], аналога [2], в качестве которого будем использовать характеристики обнаружения, т.е. зависимость вероятности правильного обнаружения от отношения сигнал/шум и число необходимых при реализации вычислительных операций предлагаемого способа и прототипа.
Для определения степени приближения предлагаемого способа к оптимальному проведено статистическое моделирование методом Монте-Карло при следующих параметрах: F=0,05 - вероятность ложной тревоги системы; число повторений опытов 500; межпериодный набег фазы сигнала за счет скорости 1π; межпериодный набег фазы за счет ускорения 0,0001π (при T=0,0001 с, λ=0,03 м ускорение равно 23,5 м/с2); флуктуации амплитуды импульсов, дружные в пределах пачки. Результаты представлены в таблице 1, в которой N - число импульсов в пачке, Nν - число каналов по скорости, М - число каналов по ускорению. В таблице 1 представлена степень приближения по критерию величины порогового отношения сигнал/шум заявляемого способа по отношению к прототипу, при различном числе импульсов в пачке, числе каналов по ускорению и числе каналов по скорости. Для справки в нижней строке таблицы 1 приведены также сравнительные характеристики аналога [2] с прототипом.
Произведем сравнительный анализ, по числу требуемых вычислительных операций на реализацию, заявляемого способа с прототипом и со способом [2]. Затраты вычислительных ресурсов измеряются в элементарных операциях (ЭО) типа умножения или сложения над действительными числами. Будем считать, что временные затраты на выполнение операции умножения и сложения близки, что соответствует современному уровню процессорной техники, при котором такие операции осуществляются за один такт.
Умножение на фазовращающие множители zk (k=0, 1,..., N-2) в пункте 1 требует 4(N-2) элементарных операций умножения и 2(N-2) ЭО сложения, то есть всего 6(N-2) ЭО.
На вычисление комплексного (N+M-2) точечного БПФ требуется 2(N+M-2)log2(N+M-2) действительных сложений и 3(N+M-2)log2(N+M-2) действительных умножений, что в сумме равно 5(N+M-2)log2(N+M-2) ЭО. В предлагаемом способе необходимо вычислить два (N+M-2) точечных БПФ, что соответствует 10(N+M-2)log2(N+M-2) ЭО. Поэлементное умножение на множители Gk (k=0, 1,..., N-2) в пункте 3 требует 6(N+M-2) ЭО. Умножение на фазовращающие множители в пункте 6 требует 6М ЭО.
Таким образом, суммарные вычислительные затраты (С) на реализацию заявляемого способа составят
C1=6(N-2)+10(N+M-2)log2(N+M-2)+6(N+M-2)+6M.
Для реализации способа-прототипа [3] необходимо отсчеты сигнальной выборки умножить на компенсирующие множители, определяемые настройкой канала по ускорению, и осуществить накопление полученных отсчетов в процессоре БПФ.
Для реализации умножения на компенсирующие множители требуется 6N ЭО, для реализации N точечного БПФ - 5(N)log2N ЭО. При числе каналов по ускорению М суммарные вычислительные затраты составят C2=M(5Nlog2N+6N) операций.
Реализация аналога из [2] требует C3=5Nlog2(N/S)+3,3Nν М операций, где Nν - число каналов по скорости; S - число сегментов БПФ [2].
Число вычислительных операций, затрачиваемых на реализацию заявляемого способа, способа-прототипа, аналога из [2], представлены в таблице 2.
Число вычислительных операций при реализации
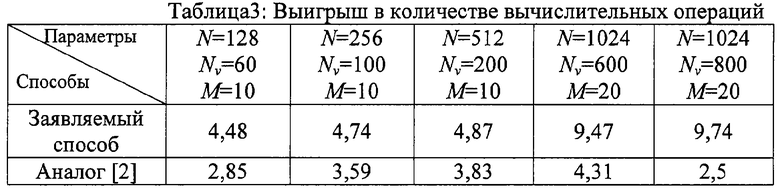
Результаты сравнения в виде отношения числа вычислительных операций в прототипе к числу вычислительных операций в заявляемом способе представлены в таблице 3. Для справки в нижней строке таблицы 3 приведены также сравнительные характеристики аналога [2] с прототипом [3].
Техническая реализация предлагаемого способа возможна на основе устройства, общая схема которого представлена на чертеже.
Устройство состоит из двух АЦП (аналого-цифровых преобразователей) 1, блока задержки 2, блока комплексного умножения 3, блока комплексного сопряжения 4, блока буферных регистров для комплексных отсчетов 5, ПЗУ устройства обработки 6, блока комплексных умножителей 7, блока вычисления комплексного N+M-2 точечного БПФ 8 [4], блока комплексных умножителей 9, блока вычисления комплексного N+M-2 точечного БПФ 11 [4], блока комплексных умножителей 13, М блоков вычисления правила (2) табличным способом 13, М блоков вычисления модуля 14, М пороговых устройств (ПУ) 15, М ключей 16, блока стабилизации уровня ложных тревог (СУЛТ) 10, блока выбора максимума 17, устройства вторичной обработки 18.
Устройство работает следующим образом. Сигнал, отраженный от маневрирующей цели, поступает на вход приемника, где последовательно проходит каскады усиления, преобразуется в квадратурных фазовых детекторах в видеочастоту и поступает на входы устройства, реализующего заявляемый способ. Квадратурные проекции сигнальной выборки после АЦП в одном элементе разрешения по дальности описываются последовательностью комплексных величин:

где Srk, Sik - действительная и мнимая части комплексного k-го отсчета соответственно, k=0...N-1.
Отсчеты Srk Sik последовательно во времени поступают на блок задержки 2, где задерживаются на период излучения импульсов в пачке Т. После этого в блоке комплексного сопряжения 4 осуществляется комплексное сопряжение задержанного отсчета. Далее в блоке комплексного умножения 3 осуществляется обработка в соответствии с правилом

С выходов блока комплексного умножения 3 отсчеты поступают в блок буферных регистров для комплексных отсчетов 5. С выходов блока буферных регистров для комплексных отсчетов 5 отсчеты поступают на вторые входы блока комплексных умножителей 7. В блоках 7, 8, 9, 11, 12 осуществляется скользящее суммирование вдоль азимута одного элемента разрешения по дальности с одновременной компенсацией доплеровского набега фазы за счет ускорения в М каналах по ускорению. Результаты скользящего суммирования и компенсации получаются на М выходах блока комплексных умножителей 12. Каждый выход блока комплексных умножителей 12 является одним каналом по ускорению. Каждый из полученных отсчетов поступает на вход схемы вычисления модуля 14 и на вход блока вычисления правила (2) 13. Полученный в 14 модуль комплексного отсчета поступает на вход порогового устройства 15, на другой вход порогового устройства 15 поступает значение порогового уровня, вычисленное в блоке СУЛТ 10. Модули комплексных отсчетов со всех М блоков вычисления модуля 14 поступают на М входов блока выбора максимума 17. В блоке 17 осуществляется выбор номера блока вычисления модуля 14, на выходе которого величина модуля отсчета максимальна, и на соответствующем этому блоку выходе блока выбора максимума 17 выставляется логическая 1, на остальных выходах блока выбора максимума 17 выставляется логический 0. При превышении величиной модуля комплексного отсчета порогового уровня в пороговом устройстве 15 на выходе соответствующего ПУ выставляется логическая 1. При этом открывается соответствующий ключ 16, который пропускает значение оценки межпериодного набега фазы сигнала за счет скорости с выхода блока вычисления правила (2) 13 на систему вторичной обработки 18, в которой по номеру открытого ключа определяется номер канала по ускорению, в котором произошло превышение порогового уровня и величина модуля комплексного отсчета, соответствующая достаточной статистике (1), в котором максимальна.
Анализ данных таблиц 1 и 2 показывает, что предлагаемый способ позволяет значительно уменьшить число вычислительных операций на реализацию, в 9,74 раз при N=1024, Nν=800, М=20, по сравнению с прототипом. При этом степень приближения порогового отношения сигнал/шум предлагаемого способа к способу-прототипу значительна (1,6 дБ при N=1024, Nν=800, М=20).
Источники информации
1. Обработка сигналов в многоканальных РЛС./Под. ред. А.П.Лукошкина. М.: Радио и связь, 1983, с.307, рис.12.18.
2. Патент № 2154837 по заявке 99113134/09 от 16.06.1999, опубл. 20.08.2000. Способ обнаружения линейно-частотно-модулированного сигнала с неизвестными параметрами. Аганин А.Г., Богданов А.В., Голубенко В.А., Киселев В.В., Лапердин В.Д., Меркулов В.И., Иванов Ю.Л., Рязанцев К.В.
3. Кузьменков В.Ю., Логинов В.М. Способы и устройства совместного измерения радиальной скорости и радиального ускорения.// Радиотехника и электроника, 1997, Т.42, № 12, с.1465...1475.
4. Рабинер Б., Гоулд Л. Теория и применение цифровой обработки сигналов: Пер. с англ. - М.: Мир, 1975, - с.848.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АДАПТИВНОЙ НАСТРОЙКИ КАНАЛОВ УСКОРЕНИЯ В МНОГОКАНАЛЬНОМ ОБНАРУЖИТЕЛЕ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2013 |
|
RU2542347C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2014 |
|
RU2553459C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ МНОГОКОМПОНЕНТНЫХ ПАССИВНЫХ ПОМЕХ | 2015 |
|
RU2593146C1 |
| Способ селекции движущихся целей | 2022 |
|
RU2820302C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА С НЕИЗВЕСТНЫМИ ПАРАМЕТРАМИ | 1999 |
|
RU2154837C1 |
| ОБНАРУЖИТЕЛЬ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2323452C1 |
| СПОСОБ И УСТРОЙСТВО БЫСТРОГО ВЫЧИСЛЕНИЯ ФУНКЦИИ НЕОПРЕДЕЛЕННОСТИ СИГНАЛА С УЧЕТОМ РЕВЕРБЕРАЦИОННОЙ ПОМЕХИ | 2009 |
|
RU2487367C2 |
| Способ обработки радиолокационных сигналов в моноимпульсной РЛС | 2016 |
|
RU2636058C1 |
| Способ адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях | 2019 |
|
RU2704789C1 |
Изобретение относится к радиолокации и может быть использовано в радиолокационной технике, в системах обработки первичной радиолокационной информации, для обнаружения маневрирующей цели в импульсно-доплеровских радиолокационных станциях, работающих в режимах с высокой частотой повторения импульсов (ЧПИ), средней ЧПИ. Способ обнаружения сигналов, отраженных от маневрирующей цели, заключается в получении мультипликаций из сигнальной выработки и их многоканальном накоплении в каналах по ускорению. Анализ результатов сравнения показывает, что при практической реализации заявляемый способ по сравнению со способом-прототипом позволяет значительно (в 9,74 раз при N=1024, Nν=800, М=20 и в 9,47 раз при N=1024, Nν=600, М=20, где N - число импульсов в пачке, Nν - число каналов по скорости, М - число каналов по ускорению) уменьшить количество вычислительных операций. При этом степень приближения порогового отношения сигнал/шум заявляемого способа к способу-прототипу значительная и составляет 1,6 дБ при N=1024, Nν=800, M=20, что существеннее, чем у аналогов, что и является достигаемым техническим результатом. 1 ил., 3 табл.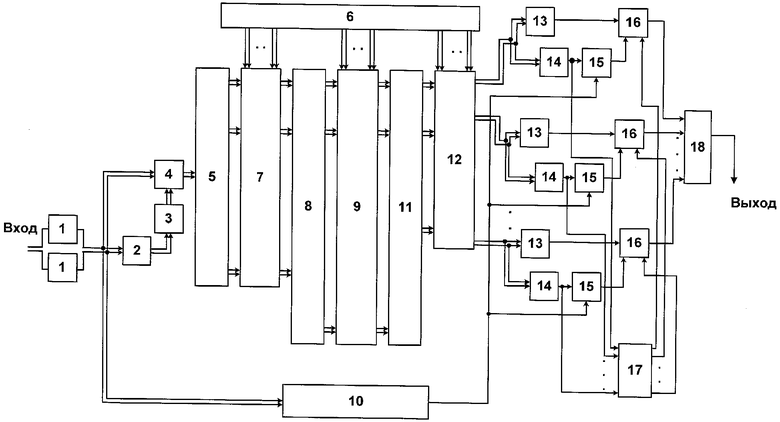
Способ обнаружения сигналов, отраженных от маневрирующей цели, заключающийся в том, что зондируют пространство пачкой когерентных радиоимпульсов, осуществляют аналого-цифровое преобразование отраженного от маневрирующей цели комплексного сигнала, представленного синфазной (действительной) и квадратурной (мнимой) составляющими, получают выборки сигналов, умножают каждый элемент выборки сигнала на комплексные фазоповорачивающие множители и запоминают их, отличающийся тем, что каждый элемент выборки сигнала, полученный после аналого-цифрового преобразования, задерживают на период повторения зондирующих импульсов, при этом мнимую часть задержанного отсчета выборки сигнала инвертируют, затем умножают каждый задержанный элемент выборки сигнала на следующий, после задержанного, элемент выборки, полученный после аналого-цифрового преобразования, осуществляют скользящее суммирование в виде комплексных отсчетов всех запомненных элементов выборки с одновременной компенсацией доплеровского набега фазы, отраженного сигнала, получаемого за счет ускорения изменения доплеровской частоты в М каналах по ускорению, каждый из полученных комплексных отсчетов используют для получения их модулей и одновременно для получения оценки доплеровского набега фазы отраженного сигнала, получаемого за счет оценки скорости изменения доплеровской частоты сигнала в соответствующем m-м канале по ускорению, где m=0, 1,..., М-1, и используемого при вычислении достаточной статистики параметров обнаружения, осуществляют выбор максимальной величины модуля комплексного отсчета, при превышении которым порогового уровня в систему вторичной обработки поступает значение оценки доплеровского набега фазы отраженного сигнала, получаемого за счет оценки скорости изменения доплеровской частоты сигнала в m-м канале по ускорению, при этом в системе вторичной обработки определяют m-й номер канала по ускорению, в котором произошло превышение порогового уровня, и соответствующую этому каналу максимальную величину модуля комплексного отсчета, соответствующую вычисленной достаточной статистике, по превышению порога обнаружения величиной модуля комплексного отсчета в m-м канале принимают решение об обнаружении маневрирующей цели.
| КУЗЬМЕНКОВ В.Ю., ЛОГИНОВ В.М | |||
| Способы и устройства совместного измерения радиальной скорости и радиального ускорения | |||
| Радиотехника и электроника, 1997, т.42, №12, с.1465-1475 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2001 |
|
RU2196341C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1998 |
|
RU2137152C1 |
| US 4173008 A, 30.10.1979 | |||
| Устройство для упрочняющей динамической обработки деталей | 1973 |
|
SU692720A2 |
| US 4458246 А, 03.07.1984. | |||

