ПЕРЕКРЕСТНАЯ ССЫЛКА
По данной заявке испрашивается приоритет по предварительной заявке на выдачу патента США № 61/025641, поданной 1 февраля 2008 г., озаглавленной "FREQUENCY ERROR ESTIMATION METHOD FOR LTE UL", которая переуступлена правопреемнику настоящей заявки и полностью включена в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Нижеследующее описание в целом относится к беспроводной связи и, в частности, к оценке отклонения частоты.
УРОВЕНЬ ТЕХНИКИ
Системы беспроводной связи широко развернуты для предоставления передачи различного типа контента, такого как речь, данные и т.п. Эти системы могут быть системами множественного доступа, выполненными с возможностью поддержки обмена информацией с несколькими пользователями путем совместного использования доступных ресурсов системы (например, полосы пропускания, мощности передачи и т.п.). Примеры систем множественного доступа включают в себя системы множественного доступа с кодовым разделением (CDMA), системы множественного доступа с временным разделением (TDMA), системы множественного доступа с частотным разделением (FDMA), системы долгосрочного развития (LTE) 3GPP, системы множественного доступа с ортогональным частотным разделением (OFDMA) и другие.
Как правило, беспроводная система связи множественного доступа может одновременно поддерживать связь для нескольких беспроводных терминалов. Каждый терминал взаимодействует с одной или несколькими базовыми станциями посредством передачи по прямой и обратной линиям связи. Прямая линия связи (или нисходящая линия связи) относится к связи от базовых станций к терминалам, а обратная линия связи (или восходящая линия связи) относится к линии связи от терминалов к базовым станциям. Линия связи может устанавливаться посредством системы с одним входом и одним выходом (SISO), со многими входами и одним выходом (MISO) или со многими входами и многими выходами (MIMO).
Как правило, для оценки отклонения частоты используются, по меньшей мере, две последовательные настраивающие последовательности (например, пилот-символы). Однако некоторые системы предоставляют только одну настраивающую последовательность и/или более одной настраивающей последовательности, причем каждая из них появляется в разной частотной области. Оценка отклонения частоты не может быть надежно произведена в системах, которые не предоставляют две последовательные настраивающие последовательности, занимающие одинаковую полосу пропускания.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Нижеследующее представляет упрощенную сущность одного или нескольких аспектов, чтобы обеспечить базовое понимание таких аспектов. Эта сущность не является всесторонним общим представлением всех предполагаемых аспектов и не предназначена ни для установления ключевых или важных элементов всех аспектов, ни для очерчивания объема любой или всех аспектов. Ее единственная цель - представить некоторые идеи одной или нескольких аспектов в упрощенной форме в качестве вступления к более подробному описанию, которое представляется позднее.
В соответствии с одним или несколькими аспектами и их соответствующим раскрытием различные аспекты описываются применительно к оценке и отслеживанию частоты. Информация о частоте может быть извлечена на основе наблюдения за одиночным символом, например символом OFDM, переносящим пилот-сигналы, независимо от расположения полосы пропускания символа. Например, информация об отклонении частоты может быть извлечена после выбора тонов, назначенных определенному мобильному устройству (например, после FFT (быстрое преобразование Фурье)). Представление временной области извлеченных пилот-символов может умножаться на локальную пилот-последовательность, и результирующая последовательность проецируется на верхний и нижний полукруг путем умножения на вращающийся вектор при разносе поднесущих +/- 0,5 (например, любой интервал разноса между 0 и 1). Разность модулей результирующих векторов может нести в себе информацию об отклонении частоты.
Один аспект относится к способу для оценки отклонения частоты. Способ включает в себя этапы, на которых получают пилот-сигнал в частотной области для первого пользователя от первой антенны и выполняют обратное дискретное преобразование Фурье для перевода частотной области пилот-сигнала в первую последовательность временной области для первой антенны. Способ также включает в себя этапы, на которых умножают первую последовательность временной области на сопряженную локальную копию, чтобы получить результирующую последовательность и модулированные последовательности, и проецируют результирующую последовательность и модулированные последовательности на верхний полукруг и нижний полукруг. Дополнительно, способ включает в себя этапы, на которых вычисляют квадрат модуля векторной суммы для верхнего полукруга и нижнего полукруга, чтобы оценить коррекцию отклонения частоты, и корректируют отклонение частоты путем умножения первой последовательности временной области на вращающийся вектор.
Другой аспект относится к устройству беспроводной связи, которое включает в себя запоминающее устройство и процессор. Запоминающее устройство хранит команды, имеющие отношение к получению пилот-сигнала в частотной области для первого пользователя от первой антенны, выполнению обратного дискретного преобразования Фурье для перевода частотной области пилот-сигнала в первую последовательность временной области для первой антенны и умножению первой последовательности временной области на сопряженную локальную копию, чтобы получить результирующую последовательность и модулированные последовательности. Запоминающее устройство также хранит команды, имеющие отношение к проецированию результирующей последовательности и модулированных последовательностей на верхний полукруг и нижний полукруг, вычислению квадрата модуля векторной суммы для верхнего полукруга и нижнего полукруга, чтобы оценить коррекцию отклонения частоты, и коррекции отклонения частоты путем умножения первой последовательности временной области на вращающийся вектор. Процессор соединяется с запоминающим устройством и конфигурируется для выполнения команд, сохраненных в запоминающем устройстве.
Еще один аспект относится к устройству беспроводной связи, которое оценивает отклонение частоты. Устройство включает в себя средство для извлечения пилот-сигнала в частотной области для первого пользователя от первой антенны и средство для выполнения обратного дискретного преобразования Фурье для перевода частотной области пилот-сигнала в первую последовательность временной области для первой антенны. Устройство также включает в себя средство для умножения первой последовательности временной области на сопряженную локальную копию, чтобы получить результирующую последовательность и модулированные последовательности, и средство для проецирования результирующей последовательности и модулированных последовательностей на верхний полукруг и нижний полукруг. Дополнительно устройство включает в себя средство для вычисления квадрата модуля векторной суммы для верхнего полукруга и нижнего полукруга, чтобы оценить коррекцию отклонения частоты, и средство для коррекции отклонения частоты путем умножения первой последовательности временной области на вращающийся вектор.
Еще один аспект относится к компьютерному программному продукту, содержащему машиночитаемый носитель. Машиночитаемый носитель включает в себя первый набор кодов для побуждения компьютера извлечь пилот-сигнал в частотной области для первого пользователя от первой антенны, и второй набор кодов для побуждения компьютера выполнить обратное дискретное преобразование Фурье для перевода частотной области пилот-сигнала в первую последовательность временной области для первой антенны. Также включается третий набор кодов для побуждения компьютера умножить первую последовательность временной области на сопряженную локальную копию, чтобы получить результирующую последовательность и модулированные последовательности, и четвертый набор кодов для побуждения компьютера спроецировать результирующую последовательность и модулированные последовательности на верхний полукруг и нижний полукруг. Машиночитаемый носитель также включает в себя пятый набор кодов для побуждения компьютера вычислить квадрат модуля векторной суммы для верхнего полукруга и нижнего полукруга, чтобы оценить коррекцию отклонения частоты, и шестой набор кодов для побуждения компьютера скорректировать отклонение частоты путем умножения первой последовательности временной области на вращающийся вектор.
Дополнительный аспект относится, по меньшей мере, к одному процессору, сконфигурированному для оценки и коррекции отклонения частоты. Процессор включает в себя первый модуль для извлечения пилот-сигнала в частотной области для первого пользователя от первой антенны, второй модуль для выполнения обратного дискретного преобразования Фурье для перевода частотной области пилот-сигнала в первую последовательность временной области для первой антенны, и третий модуль для умножения первой последовательности временной области на сопряженную локальную копию, чтобы получить результирующую последовательность и модулированные последовательности. Процессор также включает в себя четвертый модуль для проецирования результирующей последовательности и модулированных последовательностей на верхний полукруг и нижний полукруг, пятый модуль для вычисления квадрата модуля векторной суммы для верхнего полукруга и нижнего полукруга, чтобы оценить коррекцию отклонения частоты, и шестой модуль для коррекции отклонения частоты путем умножения первой последовательности временной области на вращающийся вектор.
Для выполнения вышеупомянутых и связанных целей один или несколько аспектов содержат признаки, полностью описываемые ниже и отдельно указываемые в формуле изобретения. Нижеследующее описание и приложенные чертежи подробно излагают определенные пояснительные аспекты одной или нескольких аспектов. Эти признаки, тем не менее, указывают только на некоторые из различных способов, которыми могут быть использованы принципы различных аспектов. Другие преимущества и новые признаки станут очевидными из нижеследующего подробного описания при рассмотрении в сочетании с чертежами, и раскрытые аспекты предназначены для включения всех таких аспектов и их эквивалентов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует систему беспроводной связи с коллективным доступом в соответствии с одним или несколькими аспектами.
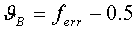
Фиг. 2 иллюстрирует схематическое представление пилот-символов, занимающих разные местоположения поднесущих из-за скачкообразной перестройки частоты.
Фиг. 3 иллюстрирует систему, которая выполняет оценку отклонения частоты в среде беспроводной связи.
Фиг. 4 иллюстрирует высокоуровневое схематическое представление цикла отслеживания частоты в соответствии с различными аспектами.
Фиг. 5 иллюстрирует схематическое представление детектора отклонения частоты в соответствии с раскрытыми аспектами.
Фиг. 6 иллюстрирует интуитивное обоснование алгоритма "проецирования".
Фиг. 7 иллюстрирует детектор отклонения частоты для многолучевых каналов.
Фиг. 8 иллюстрирует способ оценивания отклонения частоты в системе беспроводной связи.
Фиг. 9 иллюстрирует способ оценивания отклонения частоты в соответствии с одной или несколькими раскрытыми аспектами.
Фиг. 10 иллюстрирует способ оценки отклонения частоты для нескольких антенн.
Фиг. 11 иллюстрирует систему, которая облегчает оценку отклонения частоты в соответствии с одной или несколькими раскрытыми аспектами.
Фиг. 12 иллюстрирует систему, которая облегчает оценивание и коррекцию отклонения частоты в соответствии с различными аспектами, представленными в этом документе.
Фиг. 13 иллюстрирует типовую систему беспроводной связи.
Фиг. 14 иллюстрирует пример системы, которая оценивает и корректирует отклонение (отклонения) частоты.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже описываются различные аспекты со ссылкой на чертежи. В нижеследующем описании для целей пояснения излагаются многочисленные особые подробности, чтобы обеспечить всестороннее понимание одного или нескольких аспектов. Тем не менее может быть очевидным, что такие аспекты могут быть применены на практике без этой специальной подробной информации. В иных случаях широко известные структуры и устройства показываются в виде блок-схем, чтобы облегчить описание этих аспектов.
При использовании в данной заявке термины "компонент", "модуль", "система" и т.п. предназначены для ссылки на связанный с применением компьютера объект, любой из аппаратных средств, микропрограммного обеспечения, сочетания аппаратных средств и программного обеспечения, программного обеспечения либо программного обеспечения в ходе исполнения. Например, компонент может быть, но не ограничивается этим, работающим на процессоре процессом, процессором, объектом, исполняемым файлом, потоком выполнения, программой и/или компьютером. В качестве иллюстрации и приложение, работающее на вычислительном устройстве, и вычислительное устройство могут быть компонентом. Один или несколько компонентов могут находиться в процессе и/или потоке выполнения, и компонент может располагаться на одном компьютере и/или распределяться между двумя или более компьютерами. К тому же эти компоненты могут исполняться с различных машиночитаемых носителей, имеющих записанные на них различные структуры данных. Компоненты могут взаимодействовать посредством локальных и/или удаленных процессов, например в соответствии с сигналом, имеющим один или несколько пакетов данных (к примеру, данных от одного компонента, взаимодействующего с другим компонентом в локальной системе, распределенной системе и/или по сети, такой как Интернет, с другими системами посредством сигнала).
Кроме того, в этом документе описываются различные аспекты применительно к мобильному устройству. Мобильное устройство также может называться и может содержать некоторые или все функциональные возможности системы, абонентского модуля, абонентского пункта, подвижной станции, мобильного, беспроводного терминала, узла, устройства, удаленной станции, удаленного терминала, терминала доступа, пользовательского терминала, терминала, устройства беспроводной связи, устройства беспроводной связи, агента пользователя, пользовательского устройства или пользовательского оборудования (UE). Мобильное устройство может быть сотовым телефоном, беспроводным телефоном, телефоном протокола инициирования сеанса связи (SIP), смартфоном, станцией беспроводной местной системы связи (WLL), персональным цифровым помощником (PDA), переносным компьютером, карманным устройством связи, карманным вычислительным устройством, спутниковой радиосистемой, платой беспроводного модема и/или другим устройством обработки для взаимодействия в беспроводной системе. Кроме того, различные аспекты описываются в этом документе применительно к базовой станции. Базовая станция может использоваться для взаимодействия с беспроводным терминалом (терминалами), и также может называться и может содержать некоторые или все функциональные возможности точки доступа, узла, Узла В, усовершенствованного Узла В, e-NB или некоторого другого сетевого объекта.
Различные аспекты или признаки будут представляться на основе систем, которые могут включать в себя некоторое количество устройств, компонентов, модулей и т.п. Нужно понимать и принимать во внимание, что различные системы могут включать в себя дополнительные устройства, компоненты, модули и т.д. и/или могут не включать в себя все из этих устройств, компонентов, модулей и т.д., обсуждаемых в связи с чертежами. Также может использоваться сочетание этих подходов.
Со ссылкой на Фиг. 1 иллюстрируется система 100 беспроводной связи множественного доступа в соответствии с одним или несколькими аспектами. Система 100 беспроводной связи может включать в себя одну или несколько базовых станций, находящихся в связи с одним или несколькими пользовательскими устройствами. Каждая базовая станция обеспечивает покрытие для множества секторов. Иллюстрируется трехсекторная базовая станция 102, которая включает в себя несколько групп антенн, причем одна включает в себя антенны 104 и 106, другая включает антенны 108 и 110, а третья включает антенны 112 и 114. В соответствии с Фиг. 1 показано только две антенны для каждой группы антенн, однако больше или меньше антенн может использоваться для каждой группы антенн. Мобильное устройство 116 осуществляет связь с антеннами 112 и 114, причем антенны 112 и 114 передают информацию мобильному устройству 116 по прямой линии 118 связи и принимают информацию от мобильного устройства 116 по обратной линии 120 связи. Прямая линия связи (или нисходящая линия связи) относится к линии связи от базовых станций к мобильным устройствам, а обратная линия связи (или восходящая линия связи) относится к линии связи от мобильных устройств к базовым станциям. Мобильное устройство 122 осуществляет связь с антеннами 104 и 106, причем антенны 104 и 106 передают информацию мобильному устройству 122 по прямой линии 124 связи и принимают информацию от мобильного устройства 122 по обратной линии 126 связи. Например, в системе FDD линии 118, 120, 124 и 126 связи могли бы использовать разные частоты для связи. Например, прямая линия 118 связи могла бы использовать иную частоту, чем частота, используемая обратной линией 120 связи.
Каждая группа антенн и/или область, в которой они предназначены для осуществления связи, может называться сектором базовой станции 102. В одной или нескольких особенностях группы антенн предназначены для передачи информации мобильным устройствам в секторе или областях, охватываемых базовой станцией 102. Базовая станция может быть стационарной станцией, используемой для взаимодействия с терминалами.
При осуществления связи по прямым линиям 118 и 124 связи передающие антенны базовой станции 102 могут использовать формирование луча, чтобы улучшить отношение сигнал-шум у прямых линий связи для разных мобильных устройств 116 и 122. Также базовая станция, использующая формирование луча для передачи мобильным устройствам, разбросанным беспорядочно по ее зоне обслуживания, могла бы давать меньше помех на мобильные устройства в соседних сотах, чем помехи, которые могут вызываться базовой станцией, передающей через одну антенну всем мобильным устройствам в ее зоне обслуживания.
В соответствии с некоторыми аспектами, система 100 беспроводной связи выполнена с возможностью облегчения оценки и отслеживания частоты. Информация о частоте может быть извлечена на основе наблюдения за одиночным символом, например символом OFDM, переносящим пилот-сигналы, независимо от расположения ширины полосы символа. Например, информация об отклонении частоты может получаться после выбора тональных сигналов, назначенных определенному мобильному устройству (например, после FFT (быстрое преобразование Фурье)).
Раскрытые аспекты предоставляют схему для оценки отклонения частоты на узле приемника (например, в соте усовершенствованного Узла Б для системы LTE). Хотя различные аспекты могли бы описываться со ссылкой на множественный доступ с частотным разделением с одной несущей (SC-FDMA) в качестве схемы множественного доступа, соответствующей восходящей линии связи (UL) системы долгосрочного развития (LTE), раскрытые аспекты не ограничиваются этой схемой и могут распространяться на обобщенную схему OFDMA и другие схемы.
Раскрытые аспекты предоставляют несколько преимуществ, например оценку отклонения частоты на основе наблюдения за одиночным символом OFDM, переносящим пилот-сигналы. Другое преимущество состоит в том, что отсутствует оценка канала, необходимая для реализации раскрытых аспектов. Более того, раскрытые аспекты устойчивы к многолучевым системам и обладают небольшой сложностью реализации.
Некоторые аспекты будут описываться относительно оценки и отслеживания частоты на узле базовой станции (например, называемом усовершенствованным Узлом В в терминологии LTE). Схема множественного доступа для восходящей линии связи (UL) в LTE основана на FDMA (например, разное подмножество доступных поднесущих выделяется каждому пользователю).
Проблема отклонения частоты возникает, по меньшей мере, по двум основным причинам. Во-первых, гетеродин (LO) передатчика (например, мобильного устройства или другого передающего устройства) имеет смещение по отношению к смещению, используемому на приемнике (например, усовершенствованном Узле В). Это несоответствие может вызываться уходом часов, колебаниями температуры, старением, а также другими факторами. Любой беспроводной модем может испытывать один или несколько этих аспектов. Во-вторых, отклонение частоты может вызвать доплеровский сдвиг несущей частоты, вызванный относительным движением мобильного устройства в присутствии сильного отражающего компонента, обычно называемого зоной прямой видимости (LOS), который часто встречается в беспроводной сотовой связи.
Хотя приемное устройство (например, усовершенствованный Узел В) может отправлять периодические сообщения, чтобы информировать передающее устройство (например, мобильное устройство) о регулировках синхронизации его локального тактового генератора, может быть некоторое остаточное несоответствие между гетеродином (LO) терминала и сетью. Кроме того, уход частоты, вызванный доплеровским эффектом, нельзя предварительно компенсировать, и особое внимание следует уделить высокой скорости передачи данных/модуляции высокого порядка.
Результирующий эффект состоит в том, что после преобразования с понижением частоты в основную полосу принятый сигнал в приемном устройстве (например, усовершенствованном Узле В) может подвергаться частотному сдвигу, который переводится во вращение модуляционной констелляции. Это может вызвать серьезное ухудшение в рабочих характеристиках модема, особенно если применяется модуляция высокого порядка (например, 16-QAM, 64-QAM и так далее).
Чтобы помочь решению этой проблемы, модем приемника может оборудоваться устройством коррекции частоты, которое оценивает это отклонение частоты и компенсирует отклонение частоты путем простого устранения вращения принятого сигнала с использованием, например, генератора с цифровым управлением.
Некоторые технологии для оценки отклонения частоты можно сгруппировать, по меньшей мере, в две категории: обработка во временной области и обработка в частотной области. Обработка во временной области использует структуру циклического префикса (CP), который имеет место в нумерологии OFDM. Информация об отклонении частоты получается из коррелирования CP с последней частью символа OFDM и вычисления арктангенса результата. Хотя этот способ используется в WLAN, он не может применяться к восходящей линии связи (UL) в LTE, где каждый пользователь испытывает разный сдвиг частоты, так что усовершенствованному Узлу В нужно оценивать и корректировать отклонение частоты независимо для каждого пользователя. Это требование приводит к оцениванию оценки частоты после FFT, где каждый пользователь разделяется на основании структуры FDM восходящей линии связи (UL)в LTE, что может выполняться в соответствии с раскрытыми аспектами.
Традиционные подходы частотной области для оценивания отклонения частоты опираются на предположение о двух последовательных символах OFDM, переносящих пилот-сигналы. Информация об отклонении частоты получается путем взаимной корреляции этих соответствующих тональных сигналов и вычисления арктангенса. Однако этот способ не подходит для UL LTE (и других сетей), потому что пилот-символы сильно разделены во времени (что приводит к уменьшенной полосе затягивания), и что еще важно, пилот-символы могут занимать разные местоположения поднесущих из-за скачкообразной перестройки частоты. Фиг. 2 иллюстрирует схематичное представление 200 пилот-символов, занимающих разные местоположения поднесущих из-за скачкообразной перестройки частоты.
Иллюстрируются местоположения во времени символов SC-FDMA (горизонтальная ось), обозначенные от 0 до 13, и местоположения поднесущих на вертикальной оси. Фиг. 2 иллюстрирует структуру Физического совместно используемого канала восходящей линии связи (PUSCH) с перестройкой частоты внутри TTI (интервал времени передачи) для системы UL LTE. В первом временном интервале (индекс символа от 0 до 6) PUSCH и опорный сигнал (RS) занимают верхнюю часть 202 полосы пропускания. Во втором временном интервале (индекс символа с 7 по 13) те же самые каналы занимают другой набор поднесущих с выделенной полосой пропускания, как проиллюстрировано ссылкой 204. Это может называться разделением со сдвигом Чу.
Фиг. 3 иллюстрирует систему 300, которая выполняет оценку отклонения частоты в среде беспроводной связи. Система 300 конфигурируется для оценки отклонения частоты каждого передатчика на приемнике. Оценка отклонения частоты может основываться на наблюдении за одиночным символом, переносящим пилот-сигналы, расположенные в любом месте ширины полосы. Система 300 обеспечивает сложность реализации от умеренной до низкой и не нуждается в канальной информации (некогерентная). Более того, система 300 может применяться к многолучевым средам.
Система 300 включает в себя устройство 302 беспроводной связи, которое показано передающим данные по каналу. Хотя и изображено как передающее данные, устройство 302 беспроводной связи также может принимать данные по каналу (например, устройство 302 беспроводной связи может одновременно передавать и принимать данные, устройство 302 беспроводной связи может передавать и принимать данные в отличающиеся моменты, или сочетания этого). Устройство 302 беспроводной связи может быть базовой станцией, мобильным устройством или т.п.
В устройство 302 беспроводной связи включается выделитель 304 пилот-сигнала, который конфигурируется для извлечения тональных сигналов для каждого пользователя (например, мобильного устройства) в соответствии с соответствующим распределением ширины полосы. Пилот-сигналы могут извлекаться в частотной области. В соответствии с некоторыми аспектами, пилот-сигналы могут получаться для первого мобильного устройства от первой антенны и второй антенны.
Также в устройство 302 беспроводной связи включается процессор 306 IDFT, который конфигурируется для выполнения обработки IDFT для перевода частотной области пилот-сигналов в последовательности временной области для первой антенны и второй антенны.
Корректор 308 отклонения частоты конфигурируется для коррекции отклонения частоты. Корректор 308 отклонения частоты может умножать последовательность временной области на вращающийся вектор. В соответствии с некоторыми аспектами, вращающийся вектор может формироваться генератором с цифровым управлением (NCO), который управляется оценкой отклонения частоты.
Также в устройство 302 беспроводной связи включается блок 310 оценки отклонения частоты, который конфигурируется для оценки отклонения частоты на каждое мобильное устройство. В блок 310 оценки отклонения частоты включается умножитель 312, который конфигурируется для умножения принятой последовательности пилот-сигналов временной области на сопряженную локальную копию. Маршрутизатор 314 проецирует каждую из результирующих последовательностей на верхний полукруг и нижний полукруг. В соответствии с некоторыми аспектами, результирующие последовательности проецируются на каждый из полукругов путем соответственного умножения на экспоненту. Эта операция практически такая же, как вычисление DFT на дробной части разноса поднесущих.
Также в блок 310 оценки отклонения частоты включается вычислитель 316, который вычисляет квадрат модуля векторной суммы для каждого полукруга и вычитает два результата (один результат для каждого полукруга), чтобы получить оценку отклонения частоты. Дополнительные подробности блока 310 оценки отклонения частоты будут предоставлены ниже.
В соответствии с некоторыми аспектами, устройство 302 беспроводной связи также включает в себя селектор (не проиллюстрирован), который конфигурируется для выбора многолучевых компонентов из каждой последовательности временной области. Также может включаться объединитель (не проиллюстрирован), который конфигурируется для объединения коррекций отклонения частоты от каждого из многолучевых компонентов, чтобы добиться объединенной коррекции отклонения частоты.
Система 300 может включать в себя запоминающее устройство, функционально соединенное с устройством 302 беспроводной связи. Запоминающее устройство может быть внешним по отношению к устройству 302 беспроводной связи или может постоянно находиться внутри устройства 302 беспроводной связи. Запоминающее устройство может хранить информацию, имеющую отношение к оцениванию отклонения частоты в соответствии с раскрытыми аспектами. Процессор может быть функционально подключен к устройству 302 беспроводной связи (и/или запоминающему устройству), чтобы облегчить анализ информации, имеющей отношение к оценке отклонения частоты в сети связи. Процессор может процессором, выделенным для анализа и/или формирования информации, принятой устройством 302 беспроводной связи, процессором, который управляет одним или несколькими компонентами системы 300, и/или процессором, который как анализирует и формирует информацию, принятую устройством 302 беспроводной связи, так и управляет одним или несколькими компонентами системы 300.
Запоминающее устройство может хранить протоколы, связанные с коррекцией отклонения частоты, действующие для управления взаимодействием между устройством 302 беспроводной связи и другими устройствами системы 300, так что система 300 может применять сохраненные протоколы и/или алгоритмы для достижения улучшенных взаимодействий в беспроводной сети, как описано в этом документе. Например, запоминающее устройство может хранить команды, имеющие отношение к получению пилот-сигнала в частотной области для первого мобильного устройства от первой антенны и выполнению Обратного дискретного преобразования Фурье для перевода частотной области пилот-сигнала в первую последовательность временной области для первой антенны. Команды также могут относиться к умножению последовательности временной области на сопряженную локальную копию, чтобы получить результирующую последовательность и модулированные последовательности, и проецированию результирующей последовательности и модулированных последовательностей на верхний полукруг и нижний полукруг. Более того, команды могут относиться к вычислению квадрата модуля векторной суммы для верхнего полукруга и нижнего полукруга, чтобы оценить коррекцию отклонения частоты, и коррекции отклонения частоты путем умножения последовательности временной области на вращающийся вектор.
Следует принять во внимание, что описываемые в этом документе компоненты хранилища данных (например, запоминающих устройств) могут быть либо энергозависимым запоминающим устройством, либо энергонезависимым запоминающим устройством, либо могут включать в себя как энергозависимое, так и энергонезависимое запоминающее устройство. В качестве примера, а не ограничения, энергонезависимое запоминающее устройство может включать в себя постоянное запоминающее устройство (ROM), программируемое ROM (PROM), электрически программируемое ROM (EPROM), электрически стираемое и программируемое ROM (EEPROM) или флэш-память. Энергозависимое запоминающее устройство может включать в себя оперативное запоминающее устройство (RAM), которое действует как внешняя кэш-память. В качестве примера, а не ограничения, RAM доступно во многих видах, таких как синхронное RAM (SRAM), динамическое RAM (DRAM), синхронное DRAM (SDRAM), SDRAM с удвоенной скоростью обмена (DDR SDRAM), усовершенствованное SDRAM (ESDRAM), DRAM с синхронным каналом обмена (SLDRAM) и RAM с прямым доступом от Rambus (DRRAM). Запоминающее устройство 320 из раскрытых аспектов имеет целью содержать, без ограничения, эти и другие подходящие типы запоминающего устройства.
Фиг. 4 иллюстрирует высокоуровневое схематичное представление 400 цикла отслеживания частоты в соответствии с различными аспектами. Эта Фиг.4 представлена по отношению к базовой станции, однако, раскрытые аспекты применяются и к другим устройствам. Как проиллюстрировано, группа пользователей (например, мобильных устройств) обрабатывается посредством усовершенствованного Узла В. Мобильные устройства иллюстрируются в виде: Пользователя1 402, Пользователя2 404, Пользователяi 406 - ПользователяKu 408, где Ku - целое число. Обозначение "N" относится к размеру FFT системы, а обозначение "M" относится к пользовательским поднесущим.
Сигнал принимается в каждой антенне и обрабатывается посредством буфера 410. Над принятым сигналом производится обработка (412) быстрым преобразованием Фурье (FFT). Имеется n тональных сигналов, где n - целое число. Каждый пользователь 402, 404, 406, 408 занимает разное подмножество из n тональных сигналов. В простом примере n равно 20. Первый пользователь 402 занимает тональные сигналы с 1 по 5, второй пользователь 404 занимает тональные сигналы с 6 по 8, третий пользователь 406 занимает тональные сигналы с 9 по 11, и так далее, чтобы тональные сигналы не перекрывались. Более того, тональные сигналы находятся на разных частотах. Сигнал мультиплексируется (414) разным пользователям 402, 404, 406, 408, которые обслуживаются практически одновременно.
Цикл отслеживания частоты работает независимо для каждого пользователя 402, 404, 406 и 408. Этот цикл иллюстрируется подробно по отношению к Пользователюi 406, что проиллюстрировано пунктирным прямоугольником 416. Поскольку предопределено, какие тональные сигналы заняты Пользователемi 406, то по ссылке 418 извлекаются те подмножества из M тональных сигналов, где M - целое число, в соответствии с распределением полосы пропускания. Обратное дискретное преобразование 420 Фурье (IDFT) выполняется для преобразования извлеченных тональных сигналов 418 в выборки временной области. Блок 422 дискриминатора отклонения частоты (FED) оценивает отклонение частоты, которое корректируется посредством цифрового фазовращателя, синтезированного с помощью справочной таблицы 424 (LUT). В соответствии с некоторыми аспектами, FED 422 принимает контрольные выборки способом, аналогичным системе TDM. Информация об отклонении частоты получается с использованием детектора отклонения частоты, который будет подробнее объясняться со ссылкой на следующие фигуры.
Аналогичный цикл отслеживания частоты повторяется для каждого мобильного устройства (например, пользователя), потому что каждое мобильное устройство может испытывать разное отклонение частоты. Разные пользователи могут перемещаться с разными величинами скорости, и разные величины (например, доплеровский сдвиг) могут приводить к отклонению частоты. Например, первый пользователь путешествует в машине, едущей со скоростью 50 миль в час, второй пользователь едет на поезде, который движется гораздо быстрее, другой пользователь идет пешком, и так далее. Величина отклонения частоты может быть пропорциональна величине скорости. Таким образом, отклонение частоты оценивается для каждого пользователя и корректируется в расчете на пользователя.
Фиг. 5 иллюстрирует схематичное представление детектора 500 отклонения частоты в соответствии с раскрытыми аспектами. Нижеследующее будет описывать интуитивное обоснование алгоритма. Принимается сигнал временной области r[m], как проиллюстрировано ссылкой 502. В соответствии с некоторыми аспектами, сигнал может быть принят в частотной области и преобразован во временную область посредством различных методик, например Обратного дискретного преобразования Фурье (IDFT).
Принятый сигнал временной области  умножается поэлементно на сопряженную локальную последовательность пилот-сигналов временной области, чтобы убрать полярность пилот-символов. Принятый сигнал, который находится во временной области, сопоставляется с известной последовательностью. Известная последовательность может выводиться, поскольку в конкретный момент времени, когда принимается сигнал, сигнал переносит пилот-сигналы, которые уже известны, и соответственно могут дублироваться.
умножается поэлементно на сопряженную локальную последовательность пилот-сигналов временной области, чтобы убрать полярность пилот-символов. Принятый сигнал, который находится во временной области, сопоставляется с известной последовательностью. Известная последовательность может выводиться, поскольку в конкретный момент времени, когда принимается сигнал, сигнал переносит пилот-сигналы, которые уже известны, и соответственно могут дублироваться.
Результирующая последовательность затем "проецируется" на верхнюю половину 504 и нижнюю половину 506 единичной окружности. Формируется локальный пилот-сигнал, обозначенный с помощью  . Локальный пилот-сигнал
. Локальный пилот-сигнал  является индексом во времени. Каждый принятый сигнал умножается на локальный пилот-сигнал. Таким образом, имеется общая и немодулированная последовательность (например, отсутствует полярность). В соответствии с некоторыми аспектами, проекция на верхнюю половину 504 и нижнюю половину 506 аналогична дискретному преобразованию Фурье (DFT), вычисленному на дробной части разноса поднесущих.
является индексом во времени. Каждый принятый сигнал умножается на локальный пилот-сигнал. Таким образом, имеется общая и немодулированная последовательность (например, отсутствует полярность). В соответствии с некоторыми аспектами, проекция на верхнюю половину 504 и нижнюю половину 506 аналогична дискретному преобразованию Фурье (DFT), вычисленному на дробной части разноса поднесущих.
При умножении на комплексное число, например комплексно-сопряженное число, можно добиться "идеального" сигнала, если отсутствует отклонение частоты. Таким образом, в "идеальном" сценарии с отсутствием отклонения частоты и шума результирующая последовательность дает в результате все единицы ("1"). Проецирования результирующей последовательности на верхнюю половину 504 и нижнюю половину 506 единичной окружности можно достичь путем умножения результирующей последовательности на  (позиция 508) и
(позиция 508) и  (позиция 510).
(позиция 510).
 обозначает векторную сумму всех единичных векторов, расположенных в верхнем полукруге 504, а
обозначает векторную сумму всех единичных векторов, расположенных в верхнем полукруге 504, а  обозначает векторную сумму всех единичных модулей, расположенных в нижнем полукруге 506, как проиллюстрировано. Разность квадрата модуля результирующей векторной суммы каждой ветви (верхний полукруг 504 и нижний полукруг 506) выражает информацию об отклонении частоты.
обозначает векторную сумму всех единичных модулей, расположенных в нижнем полукруге 506, как проиллюстрировано. Разность квадрата модуля результирующей векторной суммы каждой ветви (верхний полукруг 504 и нижний полукруг 506) выражает информацию об отклонении частоты.
Как проиллюстрировано на Фиг. 6, если нет отклонения частоты, нет шума, то верхняя половина и нижняя половина распределения единичных векторов были бы почти точно симметричными, как проиллюстрировано ссылкой 602. Поэтому модули и , обозначенные пунктирными векторами 604 и 606, в этом случае были бы равны, следовательно, было бы обнаружено нулевое отклонение частоты.
Однако при наличии отклонения частоты единичные векторы каждого полукруга 504 и 506 поворачиваются на угол, пропорциональный отклонению частоты  . В этом случае модули векторной суммы и не будут равны (как пример, проиллюстрированный ссылкой 608), где пунктирный вектор 604 больше пунктирного вектора 606. Разность модулей этих двух векторов имеет отношение к отклонению частоты согласно следующему уравнению, где
. В этом случае модули векторной суммы и не будут равны (как пример, проиллюстрированный ссылкой 608), где пунктирный вектор 604 больше пунктирного вектора 606. Разность модулей этих двух векторов имеет отношение к отклонению частоты согласно следующему уравнению, где  является отклонением частоты:
является отклонением частоты:
 (1.0)
(1.0)
Уравнение 1
Уравнение 1 представляет аналитическое выражение S-кривой, которое может быть выведено в соответствии со следующим подробным аналитическим выводом. Пусть сигнал передачи  выражается в виде:
выражается в виде:

Уравнение 2
где  являются пилотными символами частотной области, соответствующими последовательности Чу с корнем
являются пилотными символами частотной области, соответствующими последовательности Чу с корнем  . Принятый сигнал может выражаться в виде:
. Принятый сигнал может выражаться в виде:

Уравнение 3
где  является белым комплексным шумом, а
является белым комплексным шумом, а  обозначает отклонение частоты. "Проекция" верхнего полукруга имеет вид:
обозначает отклонение частоты. "Проекция" верхнего полукруга имеет вид:

Уравнение 4.
Векторная сумма всех единичных векторов верхней половины вычисляется следующим образом:
Уравнение 5
где  формируется локально следующим образом:
формируется локально следующим образом:

Уравнение 6
Уравнение 5 тогда может быть переписано следующим образом:

Уравнение 7
При допущении плавного замирания (например,  ) Уравнение 7 может быть упрощено следующим образом:
) Уравнение 7 может быть упрощено следующим образом:

Уравнение 8
После алгебраических преобразований Уравнение 8 может быть записано в виде:

Уравнение 9
где:
 .
.
Уравнение 10
Предполагаемое значение квадрата модуля суммы векторов верхнего полукруга тогда имеет вид:

Уравнение 11
Аналогичным образом, для нижнего полукруга квадрат модуля суммы векторов равен:

Уравнение 12
где:
Уравнение 13
В конечном счете, выражение для S-кривой имеет вид:

Уравнение 13.
Дополнительно ссылаясь на Фиг. 5, в 512 нижняя ветвь 506 вычитается из верхней ветви 504, обозначенной знаком "минус". Здесь сравниваются две ветви 504 и 506, чтобы определить, равны ли ветви (нулевое отклонение частоты) или не равны (отклонение частоты). Если ветви отличаются на большую величину, то это указывает большое отклонение частоты.
Если определение заключается в том, что имеется отклонение частоты, то выполняется оценка. Поскольку обычно имеется вносимый шум, то может использоваться фильтр 514 в соответствии с некоторыми аспектами, чтобы уменьшить величину шума и предоставить "более чистую" оценку.
После фильтрации контур обратной связи продолжается к справочной таблице 516. Справочная таблица 516 формирует косинус и синус для коррекции принятого сигнала (во временной области) с помощью предполагаемой частоты, обозначенной  . Контур обратной связи продолжается в 518 и продолжает корректировать в течение некоторого времени, пока он не сведет и не скорректирует все отклонение частоты. Этот контур обратной связи может выполняться любое количество раз.
. Контур обратной связи продолжается в 518 и продолжает корректировать в течение некоторого времени, пока он не сведет и не скорректирует все отклонение частоты. Этот контур обратной связи может выполняться любое количество раз.
Детектор 500 отклонения частоты может использоваться в многолучевой среде, как обозначено ссылкой 520, что будет описываться со ссылкой на Фиг. 7, которая иллюстрирует детектор 700 отклонения частоты для многолучевых каналов. Этот детектор 700 отклонения частоты является расширением одноканального детектора отклонения частоты (FED), обозначенного ссылкой 702 пунктирными линиями, который описывался со ссылкой на Фиг. 5 выше. Чтобы сделать возможным коррекцию многолучевого замирания, может использоваться множество блоков FED. Каждый блок FED может получать информацию об отклонении частоты для определенного тракта. В частности, локальная копия во временной области пилот-сигнала выравнивается по времени с данным разрешимым трактом с задержкой  , где "i" является индексом тракта.
, где "i" является индексом тракта.
В практической реализации информация о расположении самых сильных трактов может предоставляться устройством оценки канала, которое может включаться в беспроводной приемник. Оценки ошибок, предоставленные каждым FED, впоследствии объединяются для сглаживания колебаний шума. Это может повысить достоверность оценки отклонения частоты. Следует отметить, что возможны разные типы схем объединения, включая равное усиление, взвешивание пилот-сигналов, объединение с максимальным отношением (MRC) и другие. Для простоты на Фиг. 7 иллюстрируется только линейное сложение без потери универсальности.
Практически одновременно с объединением ошибок разнесения результирующая ошибка от каждой антенны может объединяться (пространственное объединение) для дополнительного повышения надежности оценки. Пространственное объединение может быть задействовано независимо от того, сколько трактов доступны во времени, соответственно обеспечивая разнесение.
Раскрытые аспекты дополнительно могут получать информацию об отклонении частоты у пользователей с совпадающим каналом, например пользователей SDMA в восходящей линии связи LTE. Умножение на локальную копию пилот-сигнала во временной области также может использоваться для разделения пользователей с совпадающим каналом на основании уникальной ортогональной последовательности пилот-сигналов каждого пользователя. Скалярное произведение может быть реализовано путем умножения принятого многопользовательского сигнала на локальную копию пилот-сигнала заданного пользователя, например пользователя i, и затем суммирования по M выборкам, как проиллюстрировано в пунктирном прямоугольнике 702.
Возможность работать в многолучевой среде является преимуществом раскрытых аспектов. В приемнике может быть задержанная копия, так как сигналы многолучевого распространения могут поступать с некоторой задержкой. Более подробно, сигнал принимается в 704 (из FFT). В 706 извлекаются M тональных сигналов для пользователя. Например, если базовая станция обнаруживает отклонение частоты, то базовая станция могла бы быть обслуживающей множество пользователей, и отклонение частоты для каждого пользователя следует независимо определять и корректировать. Тональные сигналы обрабатываются посредством IDFT 708, и сигнал разделяется на некоторое количество ветвей, три из которых иллюстрируются в 710, 712 и 714. Каждая ветвь выполняет аналогичную операцию, как проиллюстрировано по отношению к первому тракту 710 и FED 702, однако каждый тракт испытывает разную задержку.
Каждый FED 702, 716 и 718 отслеживает некоторый тракт, соответственно вводится  . Обозначено как
. Обозначено как  для первого тракта 710,
для первого тракта 710,  для второго тракта 712 и так далее до
для второго тракта 712 и так далее до  , где L - целое число, которое представляет количество трактов. При умножении на локальную копию
, где L - целое число, которое представляет количество трактов. При умножении на локальную копию  ,
,  указывает, что последовательность должна быть задержана, и локальная копия должна быть задержана соответственно.
указывает, что последовательность должна быть задержана, и локальная копия должна быть задержана соответственно.
Для каждого из нескольких трактов оценивается  , и для всех трактов объединяются в 720. Чтобы дополнительно уточнить и скорректировать отклонение частоты, аналогичная операция повторяется для другой антенны (антенн). Таким образом, сначала имеется объединение по трактам, приводящее к ошибке
, и для всех трактов объединяются в 720. Чтобы дополнительно уточнить и скорректировать отклонение частоты, аналогичная операция повторяется для другой антенны (антенн). Таким образом, сначала имеется объединение по трактам, приводящее к ошибке  на первой антенне и второй ошибке
на первой антенне и второй ошибке  на второй антенне (проиллюстрировано в 722), и так далее. Эти ошибки вводятся в фильтр 724.
на второй антенне (проиллюстрировано в 722), и так далее. Эти ошибки вводятся в фильтр 724.
С помощью объединения различных трактов и усреднения отклонения частоты тракты, которые обладают малым количеством энергии и/или ненадежны, усредняются благодаря многолучевому разнесению. Контур обратной связи продолжается к справочной таблице 724.
В соответствии с некоторыми аспектами, отклонение частоты может применяться по пространству (например, среди антенн). Если приемник может обнаружить только один тракт, разнесение отсутствует, так как тракты не могут быть объединены. Если имеется более одной антенны, и антенны находятся на достаточно большом расстоянии, каждая антенна могла бы испытывать независимый тип замирания. Например, один сигнал мог бы иметь замирание и приниматься на первой антенне, в то время как другой тракт, принятый на второй антенне, будет иметь хороший сигнал.
В связи с типовыми системами, показанными и описанными выше, методологии, которые могут быть реализованы в соответствии с раскрытым предметом изобретения, будут лучше восприняты со ссылкой на нижеследующие блок-схемы алгоритмов. Хотя в целях простоты объяснения методологии показываются и описываются в виде последовательностей этапов, нужно понимать и принимать во внимание, что заявленный предмет изобретения не ограничивается числом или порядком этапов, так как некоторые этапы могут происходить в других порядках и/или практически одновременно с другими этапами, нежели изображено и описано в этом документе. Кроме того, не все проиллюстрированные этапы могут потребоваться для реализации методологий, описываемых в этом документе. Нужно принять во внимание, что функциональные возможности, связанные с этапами, могут быть реализованы с помощью программного обеспечения, аппаратных средств, их сочетания или любого другого подходящего средства (например, устройства, системы, процесса, компонента). Более того, следует еще принимать во внимание, что методологии, раскрытые далее и на всем протяжении этого описания изобретения, допускают хранение на изделии для облегчения транспортировки и передачи таких методологий различным устройствам. Специалисты в данной области техники должно быть понятно, что в качестве альтернативы методология могла бы быть представлена как последовательность взаимосвязанных состояний или событий, например на диаграмме состояний.
Различные способы, раскрытые в этом документе, могут выполнять оценку и компенсацию отклонения частоты в расчете на каждого пользователя. В соответствии с некоторыми аспектами, оценка и компенсация отклонения частоты выполняется во временной области.
Фиг. 8 иллюстрирует способ 800 для оценивания отклонения частоты в системе беспроводной связи. Способ 800 конфигурируется для оценки на усовершенствованном Узле В отклонения частоты для каждого пользователя (например, мобильного устройства). Как оценка отклонения частоты, так и компенсация выполняются в расчете на каждого пользователя (на мобильное устройство) во временной области.
На этапе 802 извлекаются тональные сигналы для каждого пользователя согласно соответствующему распределению ширины полосы. На этапе 804 выполняется обратное дискретное преобразование Фурье (IDFT) для перевода пилот-символов частотной области в последовательность временной области.
На этапе 806 последовательность временной области (полученная на этапе 804) умножается на вращающийся вектор, чтобы скорректировать отклонение частоты. В соответствии с некоторыми аспектами вращающийся вектор может формироваться генератором с цифровым управлением (NCO), управляемым оценкой отклонения частоты.
На этапе 808 оценивается отклонение частоты. На Фиг. 9 иллюстрируется способ 900 для оценивания этого отклонения частоты в соответствии с одной или несколькими раскрытыми аспектами.
Способ 900 конфигурируется для получения информации об отклонении частоты от одиночного символа (например, символа OFDM), переносящего пилот-сигналы. В соответствии с некоторыми аспектами не требуется ограничение (ограничения) по распределению частот. Пилот-сигналы могут занимать любую полосу пропускания в любом заданном символе, так как это происходит из-за скачкообразной перестройки частоты, без влияния на возможности алгоритма оценки. Более того, способ 900 является надежным и может работать в многолучевой среде, если имеется приблизительная информация о синхронизации.
На этапе 902 принятая последовательность пилот-сигналов временной области умножается на сопряженную локальную копию. Результирующая последовательность проецируется на верхний полукруг и нижний полукруг на этапе 904. Эта проекция соответственно может включать в себя умножение результирующей последовательности на экспоненту. На этапе 906 вычисляется квадрат модуля векторной суммы для каждого полукруга. На этапе 908 две величины (выведенные на этапе 906) вычитаются для получения оценки отклонения частоты. Эта операция практически такая же, как вычисление DFT на дробной части разноса поднесущих.
Фиг. 10 иллюстрирует способ 1000 для оценки отклонения частоты для нескольких антенн. На этапе 1002 первый пилот-сигнал для первого пользователя принимается от первой антенны, а второй пилот-сигнал для первого пользователя принимается от второй антенны. На этапе 1004 выполняется IDFT для перевода частотной области первого пилот-сигнала в первую последовательность временной области для первой антенны и второго пилот-сигнала во вторую последовательность временной области для второй антенны.
Многолучевые компоненты из каждой из первой и второй последовательностей временной области получаются от каждой антенны на этапе 1006. Каждый из многолучевых компонентов на этапе 1008 умножается на их соответствующие сопряженные локальные копии, смещенные во времени, с абсолютным сдвигом, характерным для первого пользователя, чтобы получить результирующие последовательности.
На этапе 1010 абсолютный сдвиг во времени локальной копии последовательности пилот-сигналов изменяется, чтобы получить отклонение частоты у разных пользователей с совпадающим каналом. Результирующая последовательность на этапе 1010 проецируется на верхний полукруг и нижний полукруг. На этапе 1014 вычисляется квадрат модуля векторной суммы для верхнего полукруга и нижнего полукруга. Вычисление квадрата модуля векторной суммы оценивает коррекцию отклонения частоты. Это может быть практически тем же, что и вычисление DFT на дробной части разноса поднесущих, где дробная часть является любой величиной между нулем и единицей.
На этапе 1016 коррекции отклонения частоты от каждого из многолучевых компонентов объединяются для получения объединенной коррекции отклонения частоты для каждой антенны. Результирующее отклонение частоты у каждой антенны на этапе 1018 объединяется, чтобы предоставить общую оценку отклонения частоты. На этапе 1020 отклонение частоты корректируется путем умножения последовательностей временной области на вращающийся вектор, сформированный генератором с цифровым управлением, управляемым общей объединенной коррекцией отклонения частоты.
На Фиг. 11 иллюстрируется система 1100, которая облегчает оценку отклонения частоты в соответствии с одной или несколькими раскрытыми аспектами. Система 1100 может постоянно находиться в пользовательском устройстве. Система 1100 содержит приемник 1102, который может принимать сигнал, например, от антенны приемника. Приемник 1102 может выполнять над принятым сигналом типичные действия, например фильтрацию, усиление, преобразование с понижением частоты и т.д. Приемник 1102 также может оцифровывать обработанный сигнал для получения выборок. Демодулятор 1104 может получать принятые символы для каждого периода символа, а также предоставлять принятые символы процессору 1106.
Процессор 1106 может быть процессором, выделенным для анализа информации, принятой компонентом 1102 приемника, и/или формирования информации для передачи передатчиком 1108. Дополнительно или в качестве альтернативы процессор 1106 может управлять одним или несколькими компонентами пользовательского устройства 1100, анализировать информацию, принятую приемником 1102, формировать информацию для передачи передатчиком 1108, и/или управлять одним или несколькими компонентами пользовательского устройства 1100. Процессор 1106 может включать в себя компонент контроллера, допускающий координирование связи с дополнительными пользовательскими устройствами.
Пользовательское устройство 1100 дополнительно может содержать запоминающее устройство 1108, функционально соединенное с процессором 1106, которое может хранить информацию, имеющую отношение к координированию связи, и любую другую подходящую информацию. Запоминающее устройство 1110 дополнительно может хранить протоколы, связанные с оценкой отклонения частоты. Понятно, что описываемые в этом документе компоненты хранилища данных (например, запоминающих устройств) могут быть либо энергозависимым запоминающим устройством, либо энергонезависимым запоминающим устройством, либо могут включать в себя как энергозависимое, так и энергонезависимое запоминающее устройство. В качестве иллюстрации, а не ограничения, энергонезависимое запоминающее устройство может включать в себя постоянное запоминающее устройство (ROM), программируемое ROM (PROM), электрически программируемое ROM (EPROM), электрически стираемое и программируемое ROM (EEPROM) или флэш-память. Энергозависимое запоминающее устройство может включать в себя оперативное запоминающее устройство (RAM), которое действует как внешняя кэш-память. В качестве иллюстрации, а не ограничения, RAM доступно во многих видах, таких как синхронное RAM (SRAM), динамическое RAM (DRAM), синхронное DRAM (SDRAM), SDRAM с удвоенной скоростью обмена (DDR SDRAM), усовершенствованное SDRAM (ESDRAM), DRAM с синхронным каналом обмена (SLDRAM) и RAM с прямым доступом от Rambus (DRRAM). Запоминающее устройство 1108 из обсуждаемых систем и/или способов предназначено, чтобы содержать (не будучи ограниченным) эти и любые другие подходящие типы запоминающих устройств. Пользовательское устройство 1100 дополнительно может содержать модулятор 1112 символов и передатчик 1108, который передает модулированный сигнал.
Фиг. 12 - иллюстрация системы 1200, которая облегчает оценивание и коррекцию отклонения частоты в соответствии с различными аспектами, представленными в этом документе. Система 1200 содержит базовую станцию или точку 1202 доступа. Как проиллюстрировано, базовая станция 1202 принимает сигналы от одного или нескольких пользовательских устройств 1204 с помощью приемной антенны 1206 и передает к одному или нескольким пользовательским устройствам 1204 посредством передающей антенны 1208.
Базовая станция 1202 содержит приемник 1210, который принимает информацию от приемной антенны 1206 и функционально связан с демодулятором 1212, который демодулирует принятую информацию. Демодулированные символы анализируются процессором 1214, который соединен с запоминающим устройством 1216, которое хранит информацию, имеющую отношение к формам сигнала широковещательной/групповой передачи, вложенным в форму сигнала одноадресной передачи. Модулятор 1218 может мультиплексировать сигнал для передачи передатчиком 1220 через передающую антенну 1208 к пользовательским устройствам 1204.
Фиг. 13 иллюстрирует типовую систему 1300 беспроводной связи. Система 1300 беспроводной связи изображает одну базовую станцию и один терминал для краткости. Однако ясно, что система 1300 может включать в себя более одной базовой станции или точки доступа и/или более одного терминала или пользовательского устройства, где дополнительные базовые станции и/или терминалы могут быть практически аналогичны или могут отличаться от типовой базовой станции и терминала, описываемых ниже. К тому же нужно понимать, что базовая станция и/или терминал могут применять системы и/или способы, описанные в этом документе, для содействия беспроводной связи между ними.
Согласно Фиг. 13, на нисходящей линии связи в точке 1305 доступа процессор 1310 передаваемых (ТХ) данных принимает, форматирует, кодирует, перемежает и модулирует (или посимвольно преобразует) данные трафика и предоставляет символы модуляции ("символы данных"). Модулятор 1315 символов принимает и обрабатывает символы данных и пилот-символы и предоставляет поток символов. Модулятор 1315 символов мультиплексирует данные и пилот-символы и получает набор из N передаваемых символов. Каждый передаваемый символ может быть символом данных, пилотным символом или сигнальным значением нуля. Пилот-символы могут отправляться непрерывно в каждом периоде символа. Пилот-символы могут быть мультиплексированы с частотным разделением (FDM), мультиплексированы с ортогональным частотным разделением (OFDM), мультиплексированы с временным разделением (TDM), мультиплексированы с частотным разделением (FDM) или мультиплексированы с кодовым разделением (CDM).
Модуль 1320 передатчика (TMTR) принимает и преобразует поток символов в один или несколько аналоговых сигналов и дополнительно обрабатывает (например, усиливает, фильтрует и преобразует с повышением частоты) аналоговые сигналы для формирования сигнала нисходящей линии связи, пригодного для передачи по беспроводному каналу. Сигнал нисходящей линии связи затем передается через антенну 1325 к терминалам. На терминале 1330 антенна 1335 принимает сигнал нисходящей линии связи и предоставляет принятый сигнал модулю 1340 приемника (RCVR). Модуль 1340 приемника обрабатывает (например, фильтрует, усиливает и преобразует с понижением частоты) принятый сигнал и оцифровывает обработанный сигнал для получения выборок. Демодулятор 1345 символов получает N принятых символов и предоставляет принятые пилот-символы процессору 1350 для оценки канала. Демодулятор 1345 символов дополнительно принимает оценку частотной характеристики для нисходящей линии связи от процессора 1350, выполняет демодуляцию данных над принятыми символами данных для получения оценок символов данных (которые являются оценками переданных символов данных) и предоставляет оценки символов данных процессору 1355 принимаемых данных, который демодулирует (то есть посимвольно восстанавливает), устраняет перемежение и декодирует оценки символов данных для восстановления переданных данных трафика. Обработка демодулятором 1345 символов и процессором 1355 принимаемых данных является дополняющей к обработке модулятором 1315 символов и процессором 1310 передаваемых данных соответственно, в точке 1305 доступа.
На восходящей линии связи процессор 1360 передаваемых данных обрабатывает данные трафика и предоставляет символы данных. Модулятор 1365 символов принимает и мультиплексирует символы данных вместе с пилотными символами, выполняет модуляцию и предоставляет поток символов. Затем модуль 1370 передатчика принимает и обрабатывает поток символов для формирования сигнала восходящей линии связи, который передается антенной 1335 к точке 1305 доступа.
В точке 1305 доступа сигнал восходящей линии связи от терминала 1330 принимается антенной 1325 и обрабатывается модулем 1375 приемника для получения выборок. Затем демодулятор 1380 символов обрабатывает выборки и предоставляет принятые пилот-символы и оценки символов данных для восходящей линии связи. Процессор 1385 принимаемых данных обрабатывает оценки символов данных для восстановления данных трафика, переданных терминалом 1330. Процессор 1390 выполняет оценку канала для каждого активного терминала, передающего по восходящей линии связи.
Процессоры 1390 и 1350 управляют (например, контролируют, координируют, управляют) работой в точке 1305 доступа и терминале 1330 соответственно. Соответствующие процессоры 1390 и 1350 могут быть ассоциативно связаны с запоминающими устройствами (не показаны), которые хранят программные коды и данные. Процессоры 1390 и 1350 также могут выполнять вычисления для выведения оценок частотной и импульсной характеристики для восходящей линии связи и нисходящей линии связи соответственно.
Для системы множественного доступа (например, FDMA, OFDMA, CDMA, TDMA и т.п.) несколько терминалов могут одновременно передавать по восходящей линии связи. Для такой системы поддиапазоны пилот-сигнала могут совместно использоваться между разными терминалами. Методы оценки канала могут использоваться в случаях, где поддиапазоны пилот-сигнала для каждого терминала охватывают всю рабочую полосу (возможно, за исключением краев полосы). Такая структура поддиапазона пилот-сигнала была бы желательной для получения частотного разнесения для каждого терминала. Описанные в этом документе методики могут реализовываться различными средствами. Например, эти методы могут реализовываться в аппаратных средствах, программном обеспечении либо их сочетании. Для аппаратной реализации модули обработки, используемые для оценки канала, могут реализовываться в одной или нескольких специализированных интегральных схемах (ASIC), цифровых процессорах сигналов (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных блоках, спроектированных для выполнения описанных в этом документе функций, или в их сочетании. С помощью программного обеспечения реализация может происходить посредством модулей (например, процедур, функций и так далее), которые выполняют описанные в этом документе функции. Коды программного обеспечения могут храниться в запоминающем устройстве и выполняться процессорами 1390 и 1350.
Со ссылкой на Фиг. 14 иллюстрируется пример системы 1400, которая оценивает и корректирует отклонение (отклонения) частоты. Система 1400 может, по меньшей мере, частично, постоянно находиться в мобильном устройстве, базовой станции или других устройствах. Нужно принять во внимание, что система 1400 представляется как включающая в себя функциональные блоки, которые могут быть функциональными блоками, которые представляют функции, реализуемые процессором, программным обеспечением или их сочетанием (например, микропрограммным обеспечением).
Система 1400 включает в себя логическую группировку 1402 электрических компонентов, которые могут действовать отдельно или совместно. Логическая группировка 1402 включает в себя электрический компонент 1404 для получения пилот-сигнала в частотной области. Пилот-сигнал может предназначаться для первого пользователя и поступать от первой антенны. В соответствии с некоторыми аспектами, пилот-сигнал извлекается из одиночного символа OFDM, переносящего пилот-сигналы. Пилот-сигналы могут занимать любую полосу пропускания в символе OFDM, что происходит из-за скачкообразной перестройки частоты.
Также в логическую группировку 1402 включается электрический компонент 1406 для выполнения обратного дискретного преобразования Фурье (IDFT) для перевода частотной области первого пилот-сигнала в первую последовательность временной области для первой антенны. Также включается электрический компонент 1408 для умножения первой последовательности временной области на сопряженную локальную копию, чтобы получить результирующую последовательность и модулированные последовательности. Логическая группировка 1402 также включает в себя электрический компонент 1410 для проецирования результирующей последовательности и модулированных последовательностей на верхний полукруг и нижний полукруг.
Электрический компонент 1412 для вычисления квадрата модуля векторной суммы для верхнего полукруга и нижнего полукруга, чтобы оценить коррекцию отклонения частоты, также включается логическую группировку 1402. В соответствии с некоторыми аспектами, вычисление квадрата модуля векторной суммы для верхнего полукруга и нижнего полукруга является дискретным преобразованием Фурье, вычисленным на дробной части разноса поднесущих, которая может быть любой дробной частью разноса поднесущих между нулем и единицей.
Дополнительно логическая группировка 1402 включает в себя электрический компонент 1414 для коррекции отклонения частоты путем умножения первой последовательности временной области на вращающийся вектор. В соответствии с некоторыми аспектами, вращающийся вектор формируется генератором с цифровым управлением, управляемым объединенной коррекцией отклонения частоты.
В соответствии с различными аспектами электрический компонент 1404 также может получать второй пилот-сигнал в частотной области для первого пользователя от второй антенны, а электрический компонент 1406 может выполнять IDFT для перевода частотной области второго пилот-сигнала во вторую последовательность временной области для второй антенны. В соответствии с этой особенностью логическая группировка 1402 включает в себя электрический компонент для идентификации многолучевых компонентов от каждой из первой и второй последовательностей временной области, полученных от каждой антенны, и электрический компонент для умножения каждого из многолучевых компонентов на их соответствующие сопряженные локальные копии, смещенные во времени, с абсолютным сдвигом, характерным для первого пользователя, чтобы получить результирующие последовательности. Также в логическую группировку 1402 может включаться электрический компонент для изменения абсолютного сдвига во времени локальной копии последовательности пилот-сигналов, чтобы получить отклонение частоты у разных пользователей с совпадающим каналом, и электрический компонент для проецирования каждой из результирующих последовательностей на верхний полукруг и нижний полукруг. Также включается электрический компонент для вычисления квадрата модуля векторной суммы для верхнего полукруга и нижнего полукруга, чтобы оценить коррекцию отклонения частоты, и электрический компонент для объединения коррекций отклонения частоты от каждого из многолучевых компонентов, чтобы получить объединенную коррекцию отклонения частоты для каждой антенны. Дополнительно логическая группировка 1402, в соответствии с этой особенностью, включает в себя электрический компонент для объединения результирующего отклонения частоты у каждой антенны, чтобы предоставить общую оценку отклонения частоты, и электрический компонент для коррекции отклонения частоты путем умножения последовательностей временной области на вращающийся вектор, сформированный генератором с цифровым управлением, управляемым общей оценкой отклонения частоты.
Кроме того, система 1400 может включать в себя запоминающее устройство 1416, которое хранит команды для выполнения функций, ассоциированных с электрическими компонентами 1404, 1406, 1408, 1410, 1412 и 1414 или другими компонентами. Нужно понимать, что один или более электрических компонентов 1404, 1406, 1408, 1410, 1412 и 1414 могут существовать внутри запоминающего устройства 1416, хотя и показаны в качестве внешних относительно запоминающего устройства 1416.
Понятно, что описанные в этом документе аспекты могут быть реализованы с помощью аппаратных средств, программного обеспечения, микропрограммного обеспечения или любого их сочетания. При реализации в программном обеспечении функции могут храниться или передаваться в виде одной или нескольких команд или кода на машиночитаемом носителе. Машиночитаемые носители включают в себя как компьютерные носители информации, так и средства связи, включая любой носитель, который способствует передаче компьютерной программы из одного места в другое. Носители информации могут быть любыми доступными носителями, к которым можно обращаться посредством универсального или специализированного компьютера. В качестве примера, а не ограничения, такие машиночитаемые носители могут содержать RAM, ROM, EEPROM, компакт-диск или другой накопитель на оптических дисках, накопитель на магнитных дисках или другие магнитные запоминающие устройства, либо любой другой носитель, который может использоваться для перемещения или хранения необходимого средства программного кода в виде команд или структур данных, и к которому можно обращаться посредством универсального или специализированного компьютера или универсального или специализированного процессора. Также любое соединение корректно называть машиночитаемым носителем. Например, если программное обеспечение передается с веб-сайта, сервера или другого удаленного источника с использованием коаксиального кабеля, оптоволоконного кабеля, витой пары, цифровой абонентской линии (DSL) или беспроводных технологий, например ИК-связи, радиочастотной связи и СВЧ-связи, то коаксиальный кабель, оптоволоконный кабель, витая пара, DSL или беспроводные технологии, например ИК-связь, радиочастотная связь и СВЧ-связь, включаются в определение носителя. Диск и диск, при использовании в данном документе, включает в себя компакт-диск (CD), лазерный диск, оптический диск, цифровой универсальный диск (DVD), гибкий диск и диск Blu-ray, где магнитные диски обычно воспроизводят данные магнитным способом, тогда как оптические диски воспроизводят данные оптически с помощью лазеров. Сочетания вышеперечисленного также следует включить в область машиночитаемых носителей.
Различные пояснительные логические узлы, логические блоки, модули и схемы, описанные применительно к особенностям, раскрытым в этом документе, могут быть реализованы или выполнены с помощью универсального процессора, цифрового процессора сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства, схемы на дискретных компонентах или транзисторной логики, дискретных аппаратных компонентов или любого их сочетания, предназначенных для выполнения описанных в этом документе функций. Универсальный процессор может быть микропроцессором, но в альтернативном варианте процессор может быть любым традиционным процессором, контроллером, микроконтроллером или конечным автоматом. Процессор также может быть реализован в виде сочетания вычислительных устройств, например, сочетания DSP и микропроцессора, множества микропроцессоров, одного или нескольких микропроцессоров совместно с ядром DSP, или любой другой подобной конфигурации. Более того, по меньшей мере, один процессор может содержать один или несколько модулей, функционирующих для выполнения одного или нескольких этапов и/или действий, описанных выше.
Для программной реализации описанные здесь методики могут реализовываться с помощью модулей (например, процедур, функций и так далее), которые выполняют описанные здесь функции. Коды программного обеспечения могут храниться в запоминающих устройствах и выполняться процессорами. Запоминающее устройство может реализовываться внутри процессора или вне процессора, в этом случае оно может быть коммуникационно соединено с процессором через различные средства, которые известны в данной области техники. Более того, по меньшей мере, один процессор может включать в себя один или несколько модулей, функционирующих для выполнения функций, описанных в этом документе.
Описываемые в этом документе методики могут использоваться для различных систем беспроводной связи, таких как CDMA, TDMA, FDMA, OFDMA, SC-FDMA и других систем. Термины "система" и "сеть" часто используются взаимозаменяемо. Система CDMA может реализовывать технологию радиосвязи, такую как универсальный наземный радиодоступ (UTRA), CDMA2000 и т.д. UTRA включает в себя широкополосный CDMA (W-CDMA) и другие разновидности CDMA. Более того, CDMA2000 охватывает стандарты IS-2000, IS-95 и IS-856. Система TDMA может реализовывать технологию радиосвязи, такую как глобальная система мобильной связи (GSM). Система OFDMA может реализовывать технологию радиосвязи, такую как усовершенствованный UTRA (E-UTRA), сверхширокополосная мобильная связь (UMB), IEEE 802.11 (Wi-Fi), IEEE 802.16 (WiMAX), IEEE 802.20, Flash-OFDM® и т.д. UTRA и E-UTRA являются частью универсальной системы мобильных телекоммуникаций (UMTS). Система долгосрочного развития (LTE) 3GPP является выпуском UMTS, которая использует E-UTRA, который применяет OFDMA на нисходящей линии связи и SC-FDMA на восходящей линии связи. UTRA, E-UTRA, UMTS, LTE и GSM описываются в документах организации "Проект Партнерства Третьего Поколения" (3GPP). Более того, CDMA2000 и UMB описываются в документах организации "Вторым Проектом Партнерства Третьего Поколения" (3GPP2). Более того, такие системы беспроводной связи могут дополнительно включать в себя одноранговые (например, от мобильного устройства к мобильному устройству) специализированные (ad hoc) сетевые системы, часто использующие непарные нелицензируемые спектры, беспроводную локальную сеть 802.xx, Bluetooth и любые другие методы беспроводной связи ближнего или дальнего действия.
Кроме того, различные аспекты или признаки, описываемые в этом документе, могут быть реализованы в виде способа, устройства или изделия, используя стандартные программные и/или технические методики. Термин "изделие" при использовании в этом документе предназначен для включения в себя компьютерной программы, доступной с любого машиночитаемого устройства, несущей или носителей. Например, машиночитаемые носители могут включать в себя, но не ограничиваются, магнитные запоминающие устройства (например, жесткий диск, дискета, магнитные ленты и т.д.), оптические диски (например, компакт-диск (CD), цифровой универсальный диск (DVD) и т.д.), смарт-карты и устройства флэш-памяти (например, EPROM, карта памяти, "флэшка" и т.д.). Более того, различные носители информации, описанные в этом документе, могут представлять одно или более устройств и/или другие машиночитаемые носители для хранения информации. Термин "машиночитаемый носитель" может включать в себя, не будучи ограниченным, беспроводные каналы и различные другие носители, допускающие хранение, содержание и/или перемещение команды (команд) и/или данных. Более того, компьютерный программный продукт может включать в себя машиночитаемый носитель, имеющий одну или несколько команд или кодов, функционирующих, чтобы заставить компьютер выполнить описанные в этом документе функции.
Кроме того, этапы и/или действия способа или алгоритма, описанные применительно к раскрытым в этом документе особенностям, могут быть реализованы непосредственно в аппаратных средствах, в программном модуле, выполняемом процессором, или в сочетании этих двух элементов. Программный модуль может находиться в памяти RAM, флэш-памяти, памяти ROM, памяти EPROM, памяти EEPROM, регистрах, на жестком диске, съемном диске, компакт-диске или любом другом виде носителя информации, известного в данной области техники. Типовой носитель информации может соединяться с процессором, так что процессор может считывать информацию и записывать информацию на носитель информации. В альтернативном варианте носитель информации может составлять единое целое с процессором. Более того, в некоторых особенностях процессор и носитель информации могут постоянно находиться в ASIC. Более того, ASIC может постоянно находиться в пользовательском терминале. В альтернативном варианте процессор и носитель информации могут постоянно находиться в виде обособленных компонентов в пользовательском терминале. Более того, в некоторых особенностях этапы и/или действия способа или алгоритма могут постоянно находиться в виде одного или любого сочетания или набора кодов и/или команд на машиночитаемом носителе, который может являться частью компьютерного программного продукта.
Хотя вышеупомянутое раскрытие изобретения рассматривает пояснительные аспекты и/или аспекты, следует отметить, что в нем могут быть сделаны различные изменения и модификации без отклонения от объема описываемых аспектов и/или аспектов, который определен прилагаемой формулой изобретения. Соответственно, описанные аспекты имеют целью включать в себя все такие изменения, модификации и вариации, которые находятся в пределах объема прилагаемой формулы изобретения. Кроме того, хотя элементы описываемых аспектов могут быть описаны и заявлены в единственном числе, при этом предполагается и множественное число, если явным образом не указано ограничение единственным числом. Более того, все или часть любого аспекта могут использоваться со всем или частью любого другого аспекта, если не указано иное.
В случае, если термин "включает в себя" используется либо в подробном описании, либо в формуле изобретения, такой термин предназначен быть включающим, в некотором смысле аналогично термину "содержащий", как он интерпретируется, когда применяется в качестве промежуточного слова в формуле изобретения. Кроме того, термин "или" при использовании либо в подробном описании, либо в формуле изобретения подразумевается как "не исключающее или".
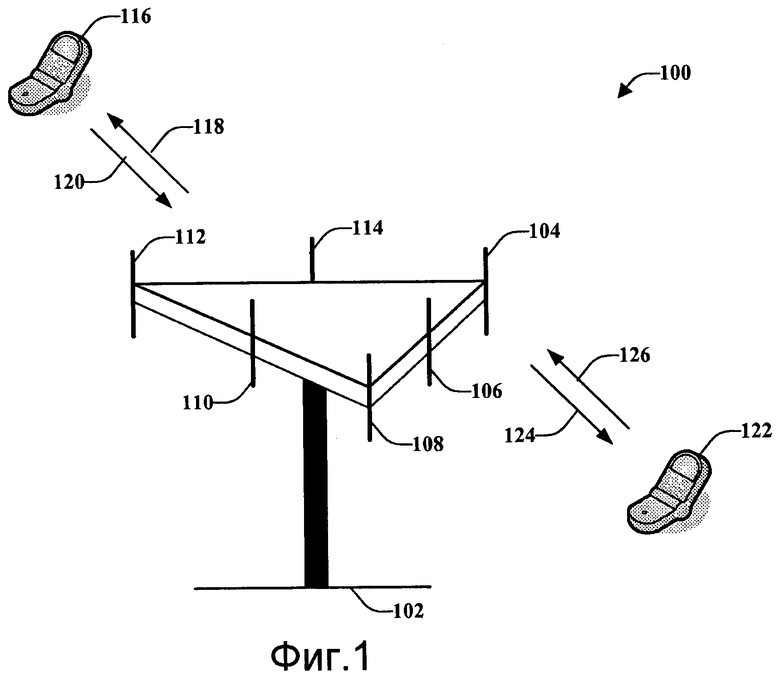

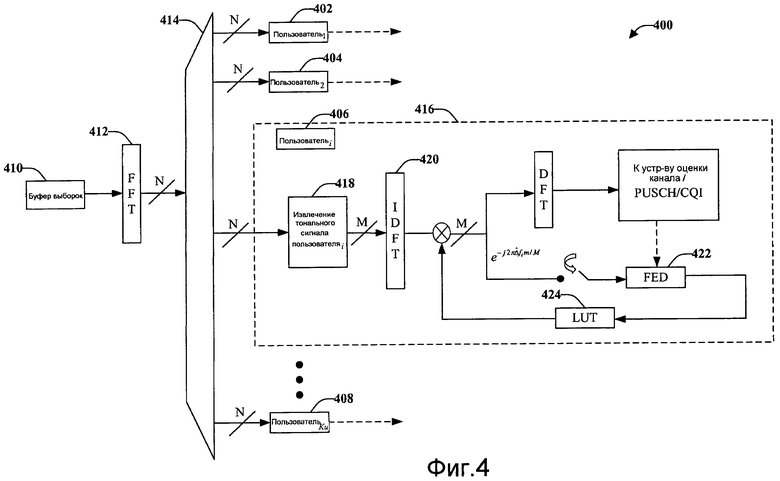
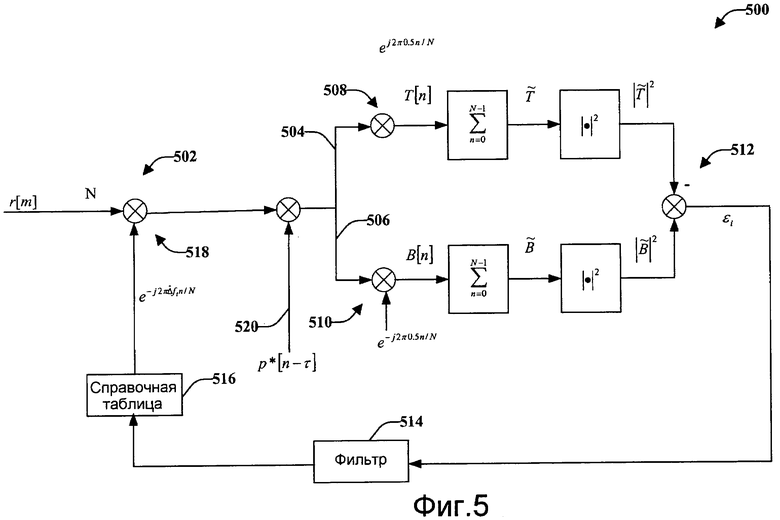
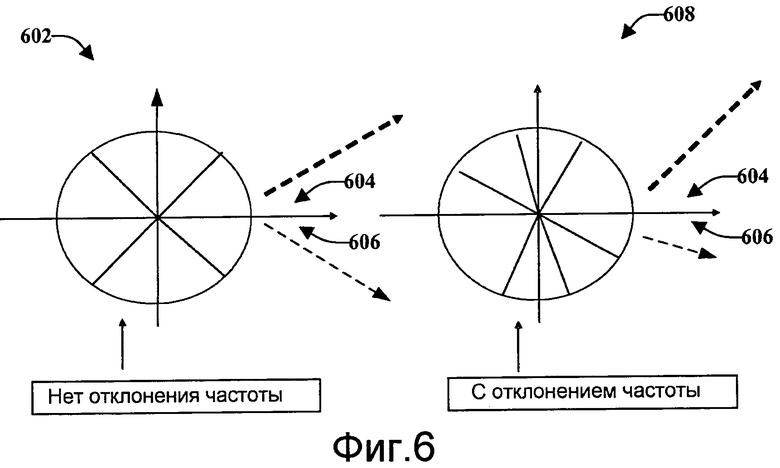
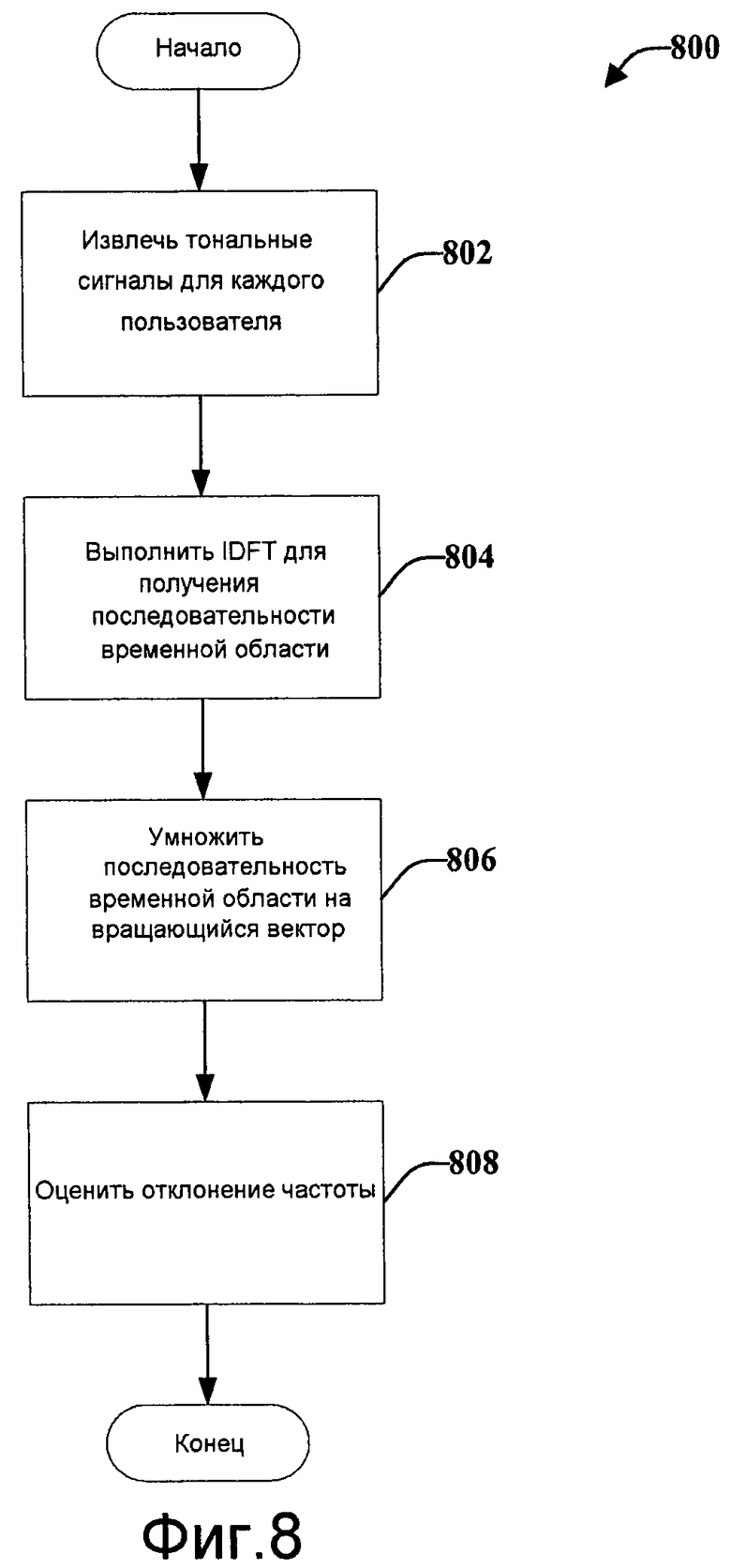
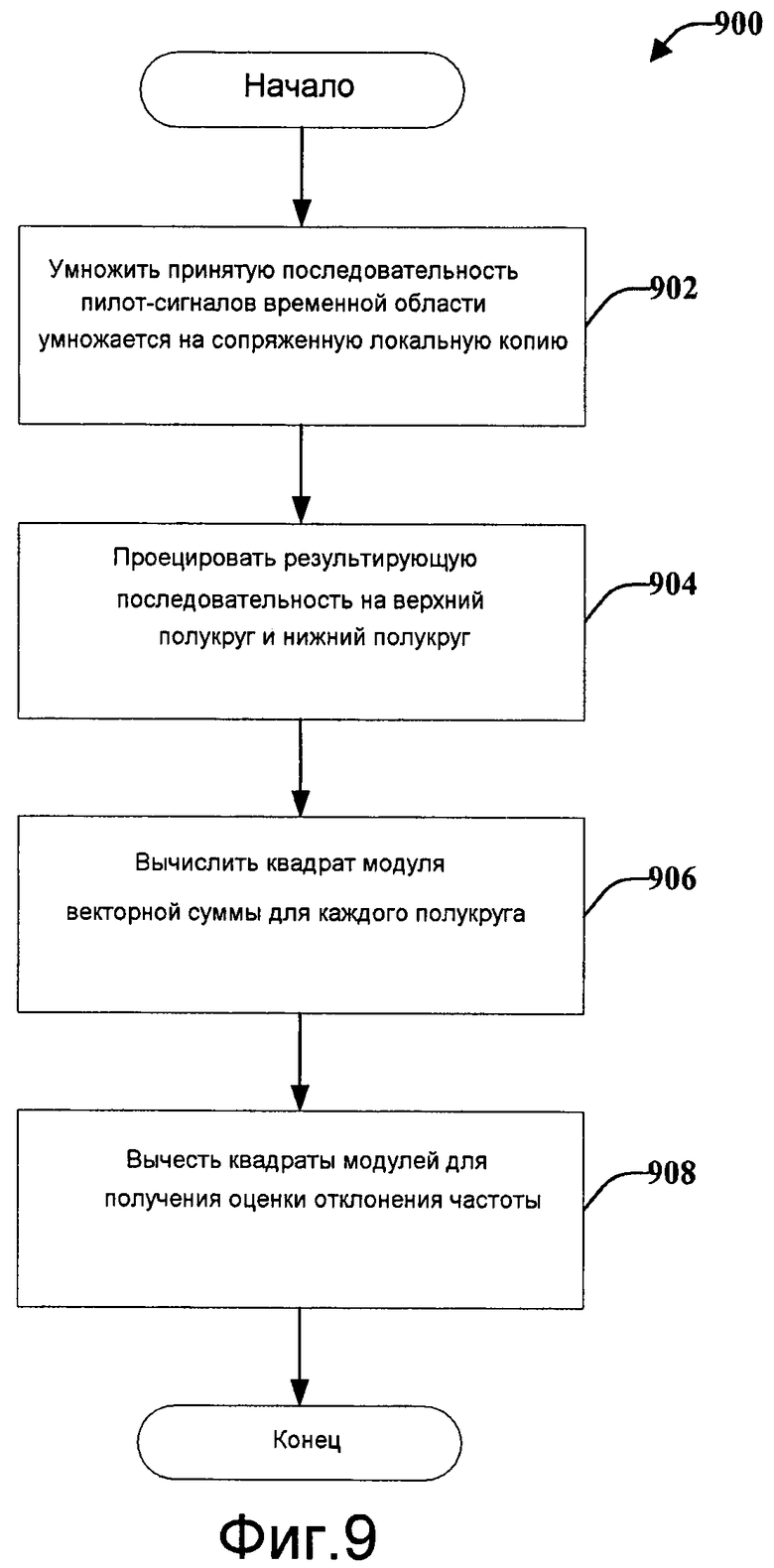
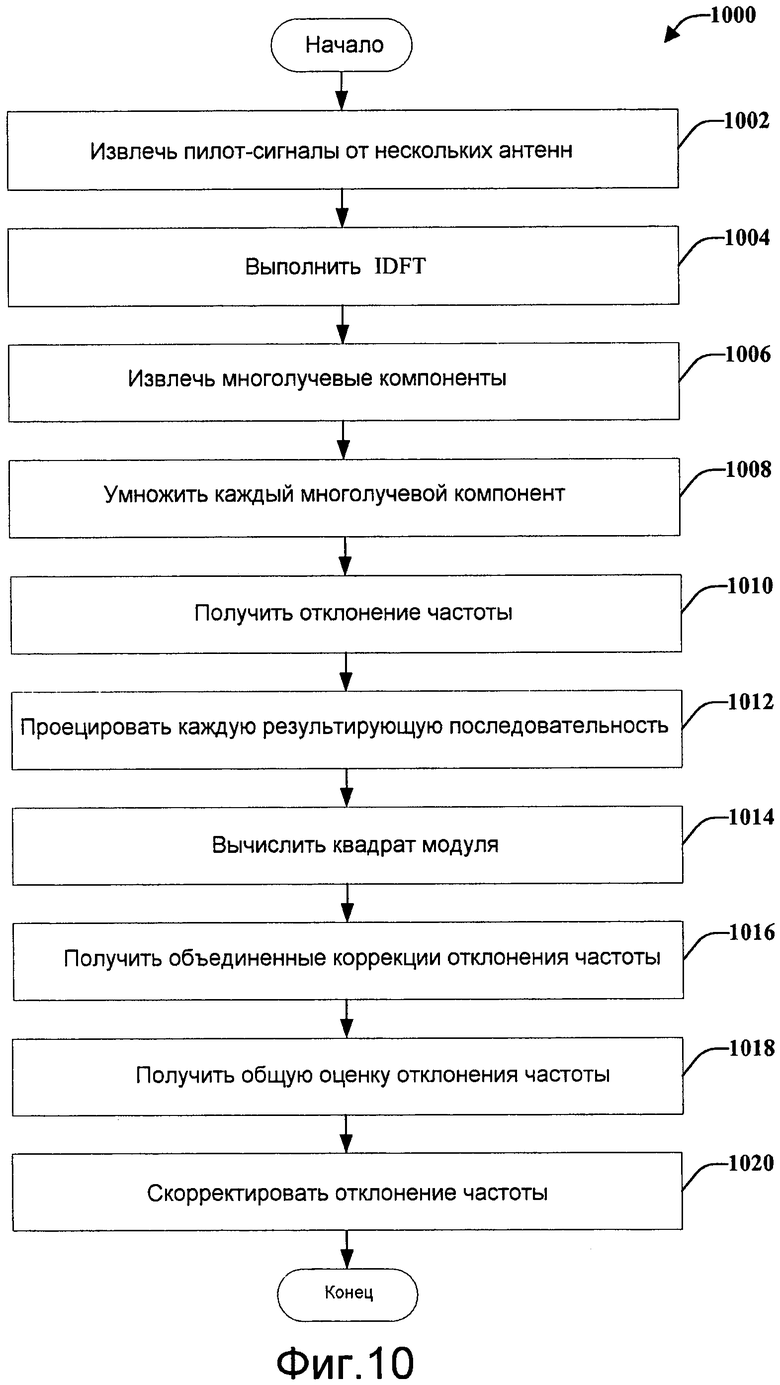
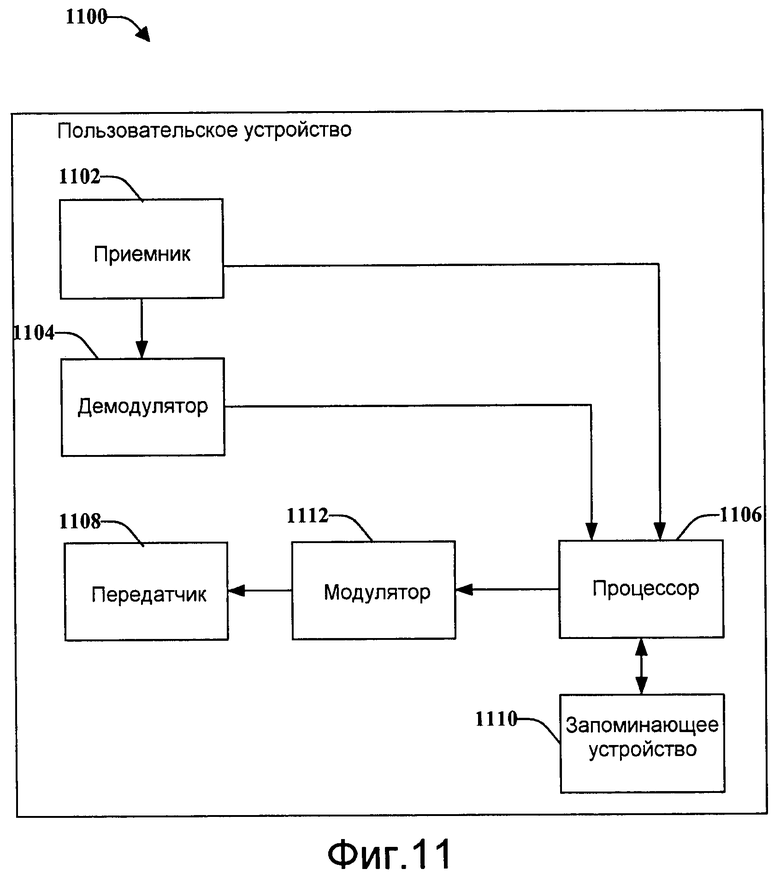
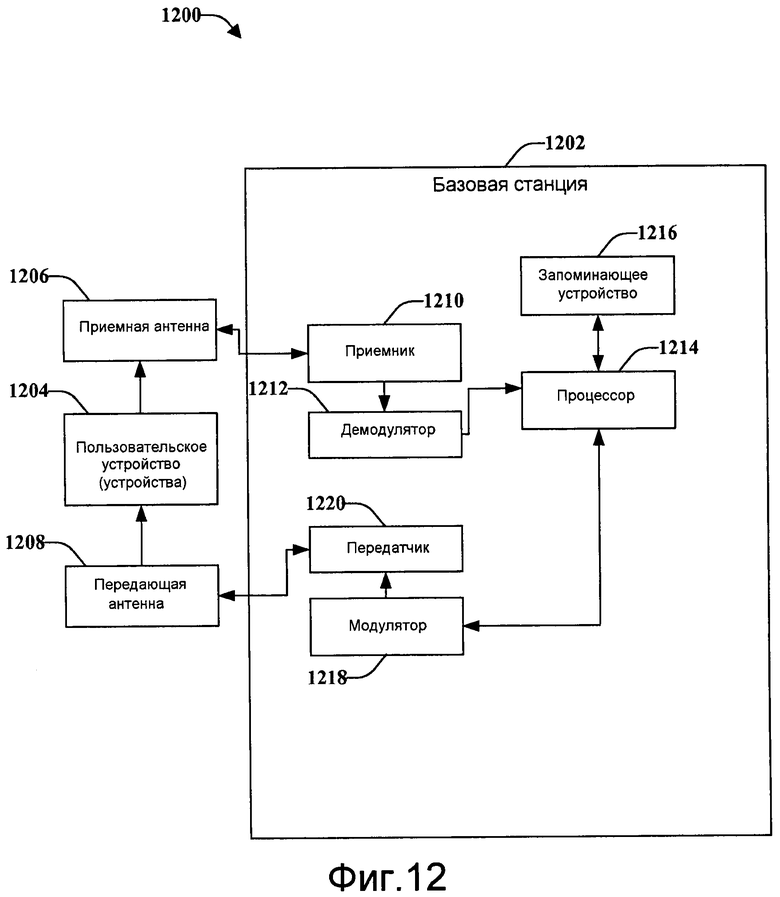
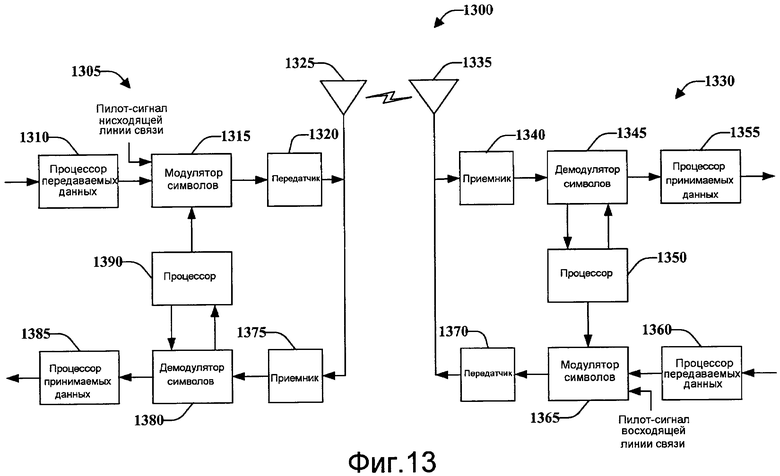
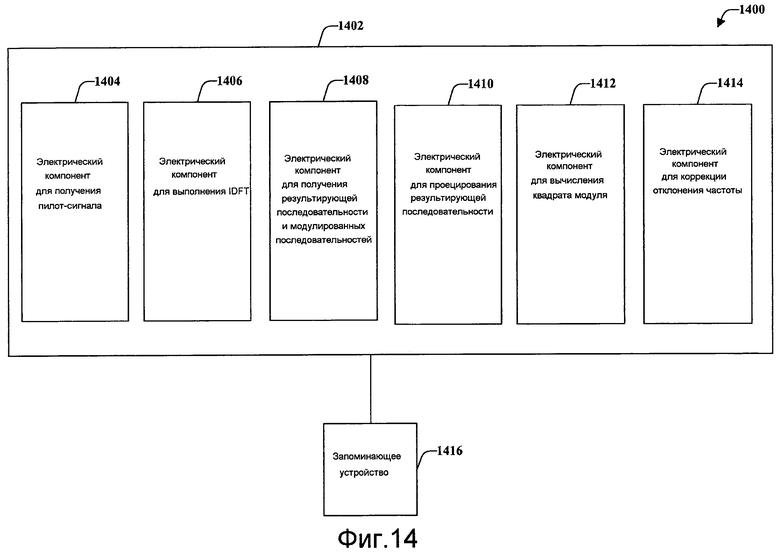
Изобретение относится к беспроводной связи и, в частности, к оценке и отслеживанию частоты и позволяет повысить точно выполнения оценки отклонения частоты. Информация о частоте получается на основе наблюдения за одиночным символом, переносящим пилот-сигналы, который может находиться в любом расположении ширины полосы. В частности, информация об отклонении частоты получается после выбора пилот-сигнала, назначенного определенному пользователю, преобразования выбранного пилот-сигнала в пилот-сигнал временной области, сопоставления его с комплексно-сопряженным пилот-сигналом, проецирования результата на верхнюю половину и нижнюю половину единичной окружности путем умножения результата на еj2π0.5n/N и е-j2π0.5n/N соответственно и вычисления разности квадрата модуля результирующей векторной суммы у каждой половины в качестве оценки отклонения частоты. Отклонение частоты может корректироваться на основе этой оценки. Более того, раскрытые аспекты могут применяться к многолучевым средам. 5 н. и 23 з.п. ф-лы, 14 ил.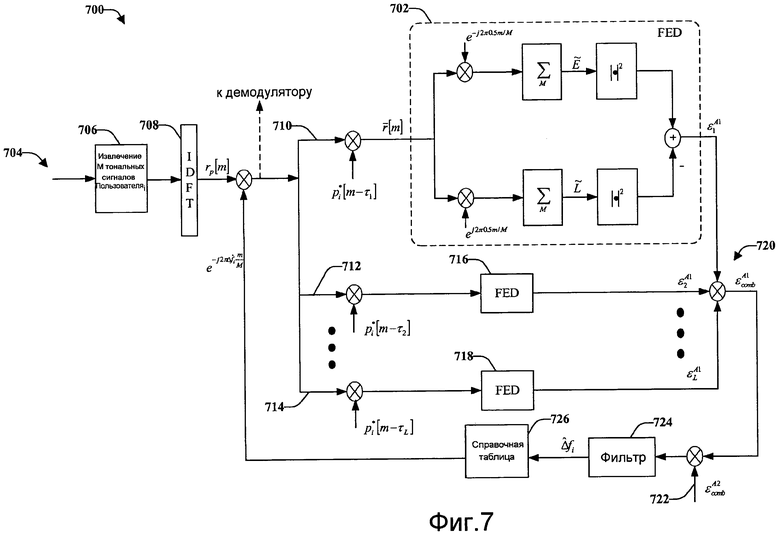
1. Способ оценки отклонения частоты, содержащий этапы, на которых:
извлекают пилот-сигнал в частотной области для первого пользователя от первой антенны;
выполняют обратное дискретное преобразование Фурье для перевода частотной области пилот-сигнала в первую последовательность временной области для первой антенны;
умножают первую последовательность временной области на сопряженную локальную копию, чтобы получить результирующую последовательность;
проецируют результирующую последовательность на верхнюю половину и нижнюю половину единичной окружности;
вычисляют квадрат модуля векторной суммы для верхней половины и нижней половины единичной окружности, чтобы оценить коррекцию отклонения частоты; и
корректируют отклонение частоты путем умножения первой последовательности временной области на вращающийся вектор, связанный с коррекцией отклонения частоты.
2. Способ по п.1, в котором вращающийся вектор формируется генератором с цифровым управлением, управляемым объединенной коррекцией отклонения частоты.
3. Способ по п.1, в котором пилот-сигнал извлекается из одиночного символа OFDM, переносящего пилот-сигналы.
4. Способ по п.3, в котором пилот-сигналы занимают любую ширину полосы в символе OFDM, что происходит из-за скачкообразной перестройки частоты.
5. Способ по п.1, в котором вычисление квадрата модуля векторной суммы для верхней половины и нижней половины единичной окружности является дискретным преобразованием Фурье, вычисленным на дробной части разноса поднесущих.
6. Способ по п.5, в котором дробная часть разноса поднесущих составляет около 0,5.
7. Способ по п.1, дополнительно содержащий этапы, на которых:
извлекают второй пилот-сигнал в частотной области для первого пользователя от второй антенны;
выполняют обратное дискретное преобразование Фурье для перевода частотной области второго пилот-сигнала во вторую последовательность временной области для второй антенны;
идентифицируют многолучевые компоненты от каждой из первой и второй последовательностей временной области, полученных от каждой антенны;
умножают каждый из многолучевых компонентов на их соответствующие сопряженные локальные копии, смещенные во времени, с абсолютным сдвигом, характерным для первого пользователя, чтобы получить результирующие последовательности;
изменяют абсолютный сдвиг во времени локальной копии последовательности пилот-сигналов, чтобы получить отклонение частоты у разных пользователей с совпадающим каналом;
проецируют каждую из результирующих последовательностей на верхнюю половину и нижнюю половину единичной окружности;
вычисляют квадрат модуля векторной суммы для верхней половины и нижней половины единичной окружности, чтобы оценить коррекцию отклонения частоты;
объединяют коррекции отклонения частоты от каждого из многолучевых компонентов, чтобы получить объединенную коррекцию отклонения частоты для каждой антенны;
объединяют результирующее отклонение частоты каждой антенны, чтобы предоставить общую оценку отклонения частоты; и корректируют отклонение частоты путем умножения последовательностей временной области на вращающийся вектор, сформированный генератором с цифровым управлением, управляемым общей оценкой отклонения частоты.
8. Устройство беспроводной связи, содержащее:
запоминающее устройство, которое хранит команды, относящиеся к получению пилот-сигнала в частотной области для первого пользователя от первой антенны, выполнению обратного дискретного преобразования Фурье для перевода частотной области пилот-сигнала в первую последовательность временной области для первой антенны, умножению первой последовательности временной области на сопряженную локальную копию, чтобы получить результирующую последовательность, проецированию результирующей последовательности на верхнюю половину и нижнюю половину единичной окружности, вычислению квадрата модуля векторной суммы для верхней половины и нижней половины единичной окружности, чтобы оценить коррекцию отклонения частоты, и коррекции отклонения частоты путем умножения первой последовательности временной области на вращающийся вектор, связанный с коррекцией отклонения частоты; и
процессор, соединенный с запоминающим устройством, сконфигурированный для выполнения команд, сохраненных в запоминающем устройстве.
9. Устройство беспроводной связи по п.8, в котором вращающийся вектор формируется генератором с цифровым управлением, управляемым объединенной коррекцией отклонения частоты.
10. Устройство беспроводной связи по п.8, в котором пилот-сигнал извлекается из одиночного символа OFDM, переносящего пилот-сигналы.
11. Устройство беспроводной связи по п.8, в котором пилот-сигналы занимают любую ширину полосы в символе OFDM, что происходит из-за скачкообразной перестройки частоты.
12. Устройство беспроводной связи по п.8, в котором вычисление квадрата модуля векторной суммы для верхней половины и нижней половины единичной окружности является дискретным преобразованием Фурье, вычисленным на дробной части разноса поднесущих.
13. Устройство беспроводной связи по п.8, в котором дробная часть разноса поднесущих составляет около 0,5.
14. Устройство беспроводной связи по п.8, в котором запоминающее устройство дополнительно хранит команды, относящиеся к извлечению второго пилот-сигнала в частотной области для первого пользователя от второй антенны, выполнению обратного дискретного преобразования Фурье для перевода частотной области второго пилот-сигнала во вторую последовательность временной области для второй антенны, идентификации многолучевых компонентов от каждой из первой и второй последовательностей временной области, полученных от каждой антенны, умножению каждого из многолучевых компонентов на их соответствующие сопряженные локальные копии, смещенные во времени, с абсолютным сдвигом, характерным для первого пользователя, чтобы получить результирующие последовательности, изменению абсолютного сдвига во времени локальной копии последовательности пилот-сигналов, чтобы получить отклонение частоты у разных пользователей с совпадающим каналом, проецированию каждой из результирующих последовательностей на верхнюю половину и нижнюю половину единичной окружности, вычислению квадрата модуля векторной суммы для верхней половины и нижней половины единичной окружности, чтобы оценить коррекцию отклонения частоты, объединению коррекций отклонения частоты от каждого из многолучевых компонентов, чтобы получить объединенную коррекцию отклонения частоты для каждой антенны, объединению результирующего отклонения частоты каждой антенны, чтобы предоставить общую оценку отклонения частоты, и коррекции отклонения частоты путем умножения последовательностей временной области на вращающийся вектор, сформированный генератором с цифровым управлением, управляемым общей оценкой отклонения частоты.
15. Устройство беспроводной связи, которое оценивает отклонение частоты, содержащее:
средство для извлечения пилот-сигнала в частотной области для первого пользователя от первой антенны;
средство для выполнения обратного дискретного преобразования Фурье для перевода частотной области пилот-сигнала в первую последовательность временной области для первой антенны;
средство для умножения первой последовательности временной области на сопряженную локальную копию, чтобы получить результирующую последовательность;
средство для проецирования результирующей последовательности на верхнюю половину и нижнюю половину единичной окружности;
средство для вычисления квадрата модуля векторной суммы для верхней половины и нижней половины единичной окружности, чтобы оценить коррекцию отклонения частоты; и
средство для коррекции отклонения частоты путем умножения первой последовательности временной области на вращающийся вектор, связанный с коррекцией отклонения частоты.
16. Устройство беспроводной связи по п.15, в котором вращающийся вектор формируется генератором с цифровым управлением, управляемым объединенной коррекцией отклонения частоты.
17. Устройство беспроводной связи по п.15, в котором пилот-сигнал извлекается из одиночного символа OFDM, переносящего пилот-сигналы.
18. Устройство беспроводной связи по п.15, в котором пилот-сигналы занимают любую ширину полосы в символе OFDM, что происходит из-за скачкообразной перестройки частоты.
19. Устройство беспроводной связи по п.15, в котором вычисление квадрата модуля векторной суммы для верхней половины и нижней половины единичной окружности является дискретным преобразованием Фурье, вычисленным на дробной части разноса поднесущих.
20. Устройство беспроводной связи по п.15, в котором дробная часть разноса поднесущих находится примерно между 0 и 1.
21. Устройство беспроводной связи по п.15, дополнительно содержащее:
средство для извлечения второго пилот-сигнала в частотной области для первого пользователя от второй антенны;
средство для выполнения обратного дискретного преобразования Фурье для перевода частотной области второго пилот-сигнала во вторую последовательность временной области для второй антенны;
средство для идентификации многолучевых компонентов от каждой из первой и второй последовательностей временной области, полученных от каждой антенны;
средство для умножения каждого из многолучевых компонентов на их соответствующие сопряженные локальные копии, смещенные во времени, с абсолютным сдвигом, характерным для первого пользователя, чтобы получить результирующие последовательности;
средство для изменения абсолютного сдвига во времени локальной копии последовательности пилот-сигналов, чтобы получить отклонение частоты у разных пользователей с совпадающим каналом;
средство для проецирования каждой из результирующих последовательностей на верхнюю половину и нижнюю половину единичной окружности;
средство для вычисления квадрата модуля векторной суммы для верхней половины и нижней половины единичной окружности, чтобы оценить коррекцию отклонения частоты;
средство для объединения коррекций отклонения частоты от каждого из многолучевых компонентов, чтобы получить объединенную коррекцию отклонения частоты для каждой антенны;
средство для объединения результирующего отклонения частоты каждой антенны, чтобы предоставить общую оценку отклонения частоты; и средство для коррекции отклонения частоты путем умножения последовательностей временной области на вращающийся вектор, сформированный генератором с цифровым управлением, управляемым общей оценкой отклонения частоты.
22. Машиночитаемый носитель, на котором хранятся команды, которые при исполнении компьютером, побуждают компьютер:
извлекать пилот-сигнал в частотной области для первого пользователя от первой антенны;
выполнять обратное дискретное преобразование Фурье для перевода частотной области пилот-сигнала в первую последовательность временной области для первой антенны;
умножать первую последовательность временной области на сопряженную локальную копию, чтобы получить результирующую последовательность;
проецировать результирующую последовательность на верхнюю половину и нижнюю половину единичной окружности;
вычислять квадрат модуля векторной суммы для верхней половины и нижней половины единичной окружности, чтобы оценить коррекцию отклонения частоты; и
корректировать отклонение частоты путем умножения первой последовательности временной области на вращающийся вектор, связанный с коррекцией отклонения частоты.
23. Машиночитаемый носитель по п.22, в котором вращающийся вектор формируется генератором с цифровым управлением, управляемым объединенной коррекцией отклонения частоты.
24. Машиночитаемый носитель по п.22, в котором пилот-сигнал извлекается из одиночного символа OFDM, переносящего пилот-сигналы.
25. Машиночитаемый носитель по п.22, в котором вычисление квадрата модуля векторной суммы для верхней половины и нижней половины единичной окружности является дискретным преобразованием Фурье, вычисленным на дробной части разноса поднесущих.
26. Процессор, выполненный с возможностью оценки и коррекции отклонения частоты, содержащий:
первый модуль для извлечения пилот-сигнала в частотной области для первого пользователя от первой антенны;
второй модуль для выполнения обратного дискретного преобразования Фурье для перевода частотной области пилот-сигнала в первую последовательность временной области для первой антенны;
третий модуль для умножения первой последовательности временной области на сопряженную локальную копию, чтобы получить результирующую последовательность;
четвертый модуль для проецирования результирующей последовательности на верхнюю половину и нижнюю половину единичной окружности;
пятый модуль для вычисления квадрата модуля векторной суммы для верхней половины и нижней половины единичной окружности, чтобы оценить коррекцию отклонения частоты; и шестой модуль для коррекции отклонения частоты путем умножения первой последовательности временной области на вращающийся вектор, связанный с коррекцией отклонения частоты.
27. Процессор по п.26, в котором пилот-сигнал извлекается из одиночного символа OFDM, переносящего пилот-сигналы.
28. Процессор по п.26, в котором вычисление квадрата модуля векторной суммы для верхней половины и нижней половины единичной окружности является дискретным преобразованием Фурье, вычисленным на дробной части разноса поднесущих.
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОСТ-БПФ КОРРЕКЦИИ ТОЧНОГО СДВИГА ПО ЧАСТОТЕ | 2003 |
|
RU2303856C2 |
| NATALI F D: "AFC TRACKING ALGORITHMS" IEEE TRANSACTIONS ON COMMUNICATIONS, IEEE SERVICE CENTER, PISCATAWAY, NJ, US, vol | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Тиристорный источник питания резистивной электропечи | 1978 |
|
SU758571A1 |
| US 2003058966 A1, 27.03.2003 | |||
| US 6891792 B1, 10.05.2005 | |||
| WO 2005071911 A1, 04.08.2005. | |||

