Предлагаемый способ применяется для измерения и оценки отклонения от перпендикулярности двух осей вращения приборов, одна из которых ведущая, а вторая - ведомая. Область техники: метрология, приборостроение.
Известны схемы и способы измерений отклонения от перпендикулярности двух осей вращения; два метода, представленные в ГОСТ 22267-76 «Станки металлорежущие. Схемы и способы измерений геометрических параметров», имеют ряд принципиальных ограничений, связанных, прежде всего, с особенностями применяемых контактных средств измерений и контроля, таких как рамные уровни и контрольные оправки. Кроме того, при определении исследуемого параметра, согласно известным методам необходима физическая доступность к обеим осям вращения прибора.
Наиболее близким по совокупности существенных признаков к предлагаемому изобретению является способ измерения угла с помощью автоколлимационного теодолита, ГОСТ 10529-96. «Теодолиты. Общие технические условия».
Известный способ заключается в том, что на отражающую поверхность наводят зрительную трубу теодолита и получают начальный отсчет измеряемого угла.
Но известным способом невозможно измерить отклонение от перпендикулярности двух осей вращения приборов.
Поставленная задача решается за счет того, что в предлагаемом изобретении, так же как и в известном способе, измерения осуществляются путем наведения первого теодолита, работающего в автоколлимационном режиме, на одну из граней призмы, установленной на ведомой оси и повернутой на 90° относительно начального положения прибора и получения начального отсчета первого угла. Но, в отличие от известного способа, в предлагаемом наводят зрительную трубу второго теодолита, работающего в автоколлимационном режиме, на ту же грань призмы, которая повернута на 180° вокруг обеих осей прибора относительно предыдущего положения и получают начальный отсчет второго угла, а затем обеспечивают оптическую связь первого и второго теодолитов с третьим и получают конечные отсчеты первого и второго теодолитов, а третьим теодолитом получают начальный и конечный отсчеты третьего угла, и по разности суммы измеренных трех углов и 180° оценивают отклонение от перпендикулярности двух осей прибора.
Достигаемым техническим результатом является возможность измерения отклонения от перпендикулярности двух осей вращения приборов бесконтактным способом.
Совокупность существенных признаков, сформулированных в п.2. формулы изобретения, характеризует способ оценивания отклонения от перпендикулярности двух осей вращения приборов, в котором измерения выполняются полными приемами.
Изобретение иллюстрируется чертежом, на котором схематично изображена последовательность операций по реализации предлагаемого способа. Реализацию способа рассмотрим с учетом признаков, изложенных в п.2. формулы изобретения на примере использования трех точных автоколлимационных теодолитов 1, 2, 3 серии 3Т2КА и шестигранной призмы 4.
Исходя из того, что угловое поле зрительной трубы теодолита ЗТ2КА составляет 1°35' и наименьшее расстояние визирования без дополнительной насадки - 1500 мм, следует, что теодолиты выставляют на штативах с точностью по высоте не менее ±20 мм.
Далее закрепляют призму с помощью оправки на ведомой оси прибора и юстируют положение призмы с помощью теодолита 3 следующим образом:
выставляют зрительную трубу теодолита так, чтобы в автоколлимационном режиме работы прибора визуально наблюдать отраженное от первой грани призмы изображение, далее, последовательно поворачивая ведомую ось прибора на 30°, убеждаются в том, что отраженные изображения от всех граней призмы по вертикальному отсчету теодолита находятся в пределах ±1'.
Таким образом, предельное значение отклонения от перпендикулярности измерительных (рабочих) поверхностей призмы относительно базовой для меры угла 2-го (худшего) класса точности составит ±1'30'' ГОСТ 2875-88. «Меры плоского угла призматические. Общие технические условия».
Исследования, описанные в работе Yu. V. Filatov, D.P. Loukianov, P.A. Pavlov, M.N. Burnashev, R. Probst. Dynamic ring laser goniometer. Ch. 12 in "Optical Gyros and their Application" / RTO/NATO AGARDograph 339, Neuilly-sur-Seine, France, 1999, p.12-17, показывают зависимость определения угла разворота многогранной призмы от величины отклонения от перпендикулярности измерительных (рабочих) поверхностей призмы относительно базовой.
Согласно формуле
 ,
,
где Δφ - погрешность определения угла поворота многогранной призмы;
φ0 - максимальное значение измеряемого угла;
β - величина отклонения от перпендикулярности измерительных (рабочих) поверхностей призмы относительно базовой.
Для рассматриваемого случая (при φ0=30° и β=90'') величина Δφ составит 0,009'', что в данном случае является пренебрежимо малой величиной.
После выставки призмы в горизонт разворачивают ведомую ось прибора на 90° вокруг ведущей оси (фиг.1 (а)) и снимают «кругом слева» первый начальный отсчет  теодолитом 1 от первой грани шестигранной призмы. Далее снимают соответствующий отсчет «кругом справа»
теодолитом 1 от первой грани шестигранной призмы. Далее снимают соответствующий отсчет «кругом справа»  и вычисляют первый начальный отсчет теодолита 1 по двум измерениям:
и вычисляют первый начальный отсчет теодолита 1 по двум измерениям:

Далее, реализовывая повороты призмы на 180° вокруг ведомой и ведущей осей прибора (фиг.1 (б)), снимают двумя кругами соответствующие горизонтальные отсчеты  и
и  теодолитом 2 от 1-й грани шестигранной призмы и вычисляют второй начальный отсчет α21:
теодолитом 2 от 1-й грани шестигранной призмы и вычисляют второй начальный отсчет α21:

Теодолит 3 выставляют так, чтобы обеспечить оптическую связь между всеми теодолитами, иначе говоря, подсвеченная сетка нитей теодолита 3 должна быть наблюдаема в окуляры теодолитов 1 и 2, при повороте первого на угол α3 (фиг.1).
Далее разворачивают теодолит 3 вокруг его вертикальной оси в сторону теодолита 1 так, чтобы существовала возможность обоими кругами снять горизонтальные отсчеты  и
и  теодолитом 1 изображения подсвеченной сетки нитей теодолита 3, при этом фиксируют третий начальный отсчет α31 теодолита 3. Вычисляют горизонтальный отсчет α13 :
теодолитом 1 изображения подсвеченной сетки нитей теодолита 3, при этом фиксируют третий начальный отсчет α31 теодолита 3. Вычисляют горизонтальный отсчет α13 :
Аналогично, развернув теодолит 3 вокруг его вертикальной оси в сторону теодолита, снимают отсчеты  и
и  и вычисляют α23:
и вычисляют α23:
Кроме того, фиксируют горизонтальный отсчет α32 теодолита 3.
Наконец, имея все входные данные, вычисляют углы α1, α2 и α3:



После чего, исходя из известного правила суммы углов треугольника, рассчитывают величину отклонения от перпендикулярности двух осей:

Далее приведем оценку погрешности определения исследуемого параметра:
При нахождении углов α1 и α2 соответственно теодолитами 1 и 2 измерения осуществляют двумя кругами, что исключает коллимационную ошибку теодолитов.
Нахождение угла α3 рассчитывают из показаний, полученных теодолитом 3 одним кругом, соответственно ошибка такого измерения составляет паспортное значение величины коллимационной ошибки теодолита 3Т2КА:
Кроме того, согласно ГОСТу 10529-96. «Теодолиты. Общие технические условия» величина коллимационной ошибки для теодолитов с автоколлимационным окуляром, может превышать паспортное значение, но не более чем на 50%, поэтому:

Перед началом измерений все три теодолита выставляют в плоскость горизонта по цилиндрическим уровням при алидаде горизонтальных кругов, с ценой деления 15'', поэтому возможная погрешность выставки составляет 7,5''. Таким образом, исходя из паспортных данных теодолитов данной серии, вычисляется систематическая погрешность компенсации. На 1' наклона вертикальной оси прибора относительно нормали к горизонту погрешность измерений составляет 0,8'', следовательно, при соответствующем наклоне в 7,5'', погрешность измерений одного теодолита составит:
Однако, т.к. все отсчеты снимают по горизонтальному углу, эту погрешность можно не учитывать.
Погрешности измерений, вызванные наличием рена и параллакса отсчетного устройства теодолитов не превышают в сумме 4,5''.
Важно: измерения проводятся теодолитами, прошедшими обязательную периодическую поверку и имеющими соответствующее свидетельство о поверке от метрологических служб РФ. Это же относится и к мере плоского угла.
Таким образом, суммарная предельная погрешность оценки отклонения от перпендикулярности двух осей предлагаемым способом будет определяться максимальным значением коллимационной ошибки теодолита 3 и погрешностями рена и параллакса всех (трех) теодолитов:

Описание предложенного способа доказывает возможность достижения технического результата - возможность измерения отклонения от перпендикулярности двух осей вращения приборов бесконтактным способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЛИМАЦИОННЫЙ ТЕОДОЛИТ | 1995 |
|
RU2106600C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗМУЩЕНИЙ И БИЕНИЙ ВЕРТИКАЛЬНОЙ ОСИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА | 2013 |
|
RU2530451C1 |
| Устройство для поверок геодезических приборов | 1981 |
|
SU1113698A1 |
| Устройство для поверок геодезических приборов | 1978 |
|
SU763682A1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ЦЕНТРИР | 2009 |
|
RU2430332C2 |
| СССОЮЗНАЯ 1l*Tiiai.T^i^^rei(dйЧМИОТЕК.*ТЕОДОЛИТ | 1971 |
|
SU304431A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ И ВЕРТИКАЛЬНЫХ УГЛОВ ГЕОДЕЗИЧЕСКИХ УГЛОМЕРНЫХ ПРИБОРОВ | 2011 |
|
RU2463561C1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423664C2 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2383862C1 |
Способ оценивания отклонения от перпендикулярности двух осей вращения приборов, одна из которых ведущая, а вторая - ведомая, применяется в метрологии и приборостроении. Способ реализуется путем наведения зрительной трубы первого теодолита, работающего в автоколлимационном режиме, на одну из граней призмы, установленной на ведомую ось и повернутой вокруг ведущей оси на 90° относительно начального положения прибора и получения начального отсчета первого угла. Далее наводят зрительную трубу второго теодолита, работающего в автоколлимационном режиме, на ту же грань призмы, которая повернута на 180° вокруг обеих осей прибора относительно предыдущего положения и получают начальный отсчет второго угла. Обеспечивают оптическую связь первого и второго теодолитов с третьим и получают конечные отсчеты первым и вторым теодолитами, а третьим теодолитом получают начальный и конечный отсчеты третьего угла, и по разности между суммой измеренных трех углов и 180° оценивают отклонение от перпендикулярности двух осей вращения прибора. Техническим результатом является возможность измерения отклонения от перпендикулярности двух осей вращения приборов бесконтактным способом. 1 з.п. ф-лы, 1 ил.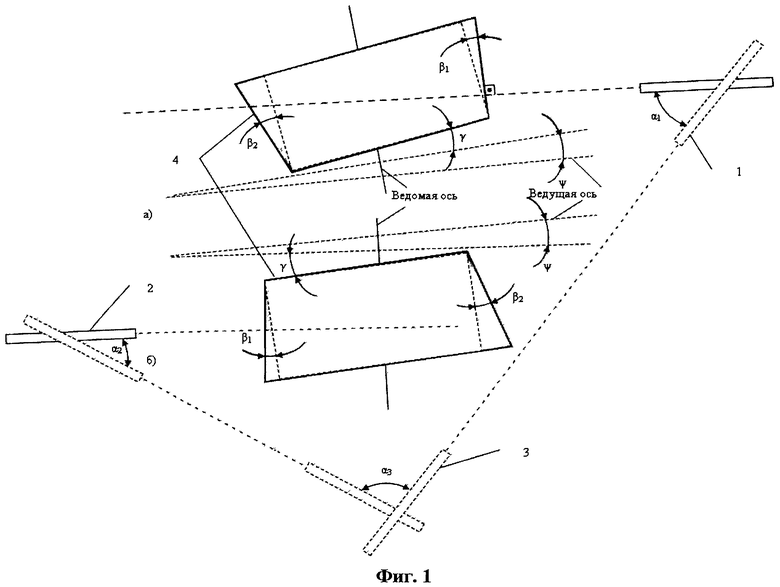
1. Способ оценивания отклонения от перпендикулярности двух осей вращения приборов, одна из которых ведущая, а вторая - ведомая, реализуется путем наведения зрительной трубы первого теодолита, работающего в автоколлимационном режиме, на одну из граней призмы, установленной на ведомую ось и повернутой вокруг ведущей оси на 90° относительно начального положения прибора и получения начального отсчета первого угла, отличающийся тем, что наводят зрительную трубу второго теодолита, работающего в автоколлимационном режиме, на ту же грань призмы, которая повернута на 180° вокруг обеих осей прибора относительно предыдущего положения, и получают начальный отсчет второго угла, а затем обеспечивают оптическую связь первого и второго теодолитов с третьим и получают конечные отсчеты первым и вторым теодолитами, а третьим теодолитом получают начальный и конечный отсчеты третьего угла, и по разности суммы измеренных трех углов и 180° оценивают отклонение от перпендикулярности двух осей прибора.
2. Способ оценивания отклонения от перпендикулярности двух осей вращения приборов по п.1, отличающийся тем, что измерения выполняются полными приемами.
| Гальваническая газовая батарея | 1927 |
|
SU10529A1 |
| Общие технические условия», введен в действие непосредственно в качестве государственного стандарта РФ с 01.07.1998 г | |||
| Устройство для поверки сетки нитей оптических геодезических приборов | 1980 |
|
SU901820A1 |
| Способ измерения отклонения от перпендикулярности | 1987 |
|
SU1525434A1 |
| Способ измерения отклонения от перпендикулярности поверхностей | 1987 |
|
SU1578463A1 |
| Стенд для исследования деформированного и напряженного состояния коленчатого вала двигателя внутреннего сгорания | 1980 |
|
SU983481A1 |

