Изобретение относится к измерительной технике. Предлагаемый способ применяется для измерения и оценки возмущений и биений вертикальной оси опорно-поворотного устройства (ОПУ).
Известен способ измерения возмущений и биений вертикальных осей опорно-поворотных устройств (Грызулин С.И. Юстировка оптических трактов: Монография. - М.: Макс Пресс, 2011. - 100-102 с.), который является наиболее близким по совокупности существенных признаков к предлагаемому изобретению.
Способ заключается в том, что на вращающей части опорно-поворотного устройства укрепляют пару взаимно перпендикулярных цилиндрических уровней или двухкоординатный датчик наклона, измеряющий угловые координаты свободного вектора в системе отвесной линии. На фиг.1 показана схема реализации способа, где: 1 - ось вращения; 2 - инструментальный вектор; 3, 4 - цилиндрические уровни; 5 - отвесная линия. В этом случае вектор образуется линией пересечения плоскостей, проходящих через нуль - пункты уровней или отсчетных плоскостей датчика наклона. В процессе измерений проходят рабочий диапазон осевой системы, как минимум два раза, в прямом и обратном направлении с остановками через равные интервалы углов поворота и берут отсчеты по уровням. Для перехода к координатам инструментального вектора в неподвижной системе необходимо знать ориентировку уровней относительно меридиана места в начальном положении. Пересчет показаний уровней в угловые величины выполняют в соответствии с инструкцией по применению приборов. Затем вычисляют координаты точек годографа, умножая матрицы измеренных координат инструментального вектора на матрицы поворота системы координат. После аппроксимации годографа вычисляются координаты осевого вектора. Изучая траекторию осевого вектора, получают необходимые характеристики вращения, а именно возмущения (колебания оси с достаточной точностью повторяются при новых циклах вращения) и биения (колебания оси носят случайный характер).
Недостатком прототипа является сложность математического расчета, необходимость создания площадки под установку уровней или датчика на этапе конструирования опорно-поворотного устройства.
Задачей данного изобретения является создание способа измерения возмущений и биений вертикальных осей опорно-поворотных устройств, позволяющего сократить время на расчет возмущений и биений вертикальных осей.
Техническим результатом способа является его упрощение и сокращение трудозатрат вследствие сокращения времени, необходимого на расчет возмущений и биений вертикальных осей.
Технический результат достигается за счет того, что в способе определения возмущений и биений вертикальной оси опорно-поворотного устройства, заключающемся в том, что используют два прибора, измеряющих угловые координаты, при этом в процессе измерений проходят рабочий диапазон вращения вертикальной оси в прямом и обратном направлении с остановками через равные интервалы углов поворота и снимают показания углов наклона, новым является то, что в измерительную систему вводят многогранную зеркальную призму, которую устанавливают в горизонтальной плоскости, совмещая ее центр с вертикальной осью вращения, а в качестве приборов, измеряющих угловые координаты, используют два автоколлимационных (АК) теодолита, при этом теодолиты наводят на грани многогранной призмы, причем располагают их таким образом, чтобы визирные оси теодолитов были на одном уровне с многогранной призмой и образовывали между собой угол, равный 90°, и при каждой j-ой установке (где j=l,2,…,n - количество граней призмы) вертикальной оси теодолитами измеряют углы наклона соответствующих граней призмы при прямом и обратном направлении вращения оси, значение углов считывают по вертикальному кругу теодолита при совмещении сетки теодолита с ее автоколлимационным изображением, тогда значения координат (V1j, V2j) вектора возмущений вертикальной оси рассчитывают по формуле:
а значения координат (B1j, B2j) вектора биений вертикальной оси рассчитывают по формуле:
где:
xj - значение угла наклона j-ой грани, соответствующей первому теодолиту, и измеренное им при прямом и обратном направлении вращения оси,
yj - значение угла наклона j-ой грани, соответствующей второму теодолиту, и измеренное им при прямом и обратном направлении вращения оси.
Использование зеркальной многогранной призмы, расположенной таким образом, что ее центр совмещен с вертикальной осью вращения, и АК теодолитов для измерения углов наклона граней призмы относительно вертикали позволяет напрямую измерять координаты осевого вектора вращения вертикальной оси без измерения координат инструментального вектора. В данном способе нет необходимости знать ориентировку многогранной призмы и теодолитов относительно меридиана места в начальном положении. Поэтому расчет возмущений и биений вертикальной оси проводится в один этап, подстановкой значений измеренных углов в формулы. Следовательно, преимущество данного способа в простом расчете возмущений и биений.
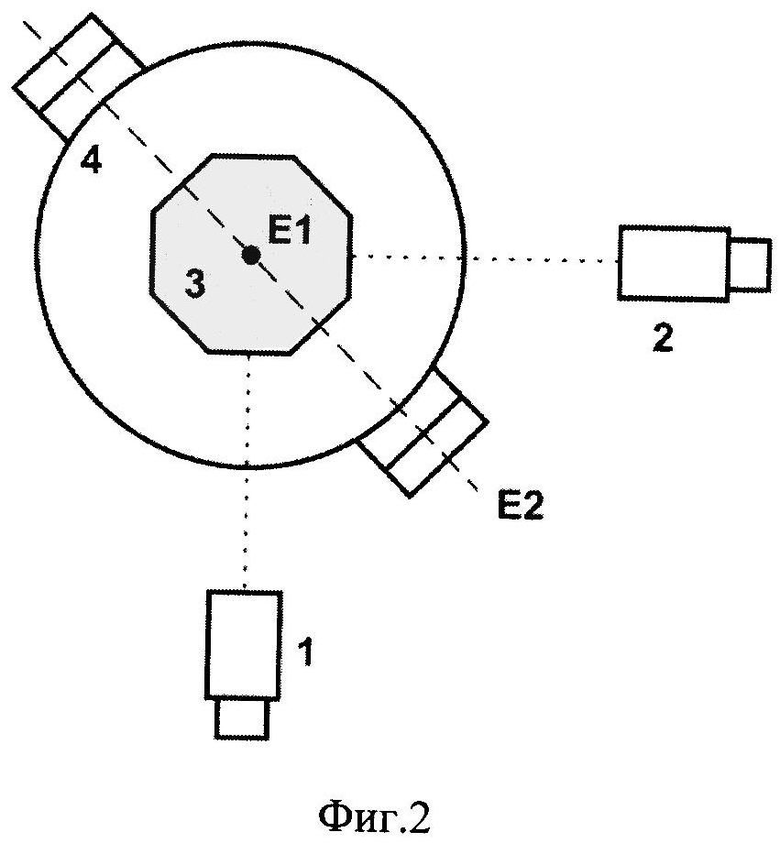
На фиг.2 показана схема реализации способа на примере альт-азимутальной монтировки с зеркалом, где: 1 - первый теодолит; 2 - второй теодолит; 3 - многогранная зеркальная призма; 4 - зеркало ОПУ; El, Е2 - оси ОПУ.
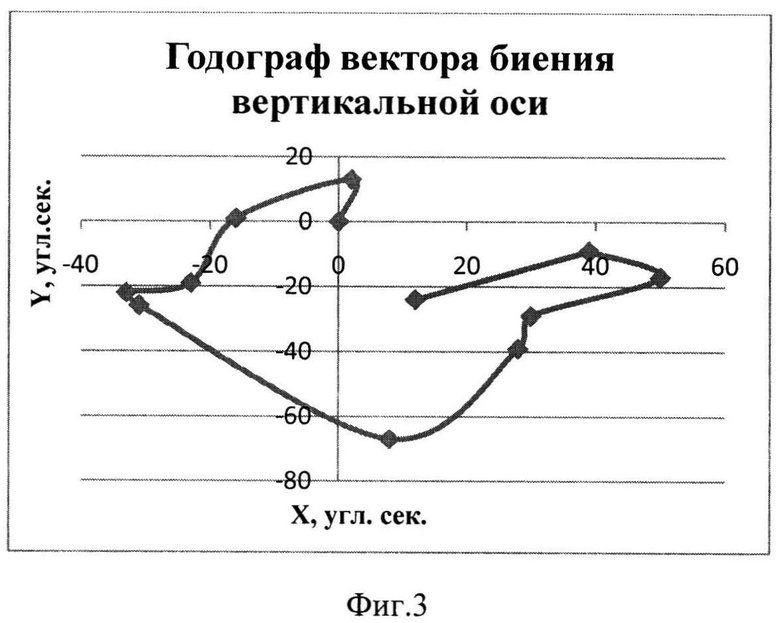
На фиг.3 показан годограф вектора биения вертикальной оси альт-азимутальной монтировки телескопа MEADE LX200GPS.
На фиг.4 показан годограф вектора возмущения вертикальной оси альт-азимутальной монтировки телескопа MEADE LX200GPS.
Предварительно ось Е1 монтировки выводят в вертикальное положение, затем зеркало (4) поворачивают вокруг оси Е2 на угол Δе2=90°, таким образом, чтобы плоскость зеркала располагалась в горизонтальной плоскости, после чего на его центр устанавливают многогранную призму (3), совмещая ее центр с вертикальной осью вращения.
Первый теодолит (1) наводят на одну из граней многогранной призмы, второй теодолит (2) наводят на соответствующую грань призмы, при этом располагают теодолиты таким образом, чтобы визирные оси теодолитов были на одном уровне с многогранной призмой (3) и образовывали между собой угол, равный 90°. Определение возмущений и биений вертикальной оси с оценкой точности определяемых параметров выполняется из обработки измерений теодолитами в полном диапазоне вращения оси Е1.
Обработка измерений выполняется в следующей последовательности. Исследуемую ось вращают с остановками через равные интервалы углов поворота. При каждой j-ой установке (где j=l,2,…,n - количество граней призмы) вертикальной оси опорно-поворотного устройства теодолитами измеряются наклоны соответствующих граней призмы при прямом (по ходу часовой стрелки) и обратном направлении вращения ОПУ, значение углов считываются по вертикальному кругу теодолита при совмещении сетки теодолита с ее автоколлимационным изображением.
Вычисляется средняя квадратичная погрешность m и средняя квадратичная погрешность, определяющая качество вращения оси:


где mu - средняя квадратичная погрешность, характеризующая инструментальную точность измерений теодолитом.
В примере конкретного выполнения заявляемый способ был реализован с помощью следующих технических средств: двух теодолитов марки 3Т2КА с самоустанавливающимся нулем вертикального круга и многогранной эталонной призмы ПМ-12. В качестве объекта исследования выбрана альт-азимутальная монтировка телескопа MEADE LX200GPS. ОПУ поворачивалось по команде управляющего компьютера на 360° с остановками через 30°. Вращение производилось в прямом (по ходу часовой стрелки) и в обратном направлениях. При каждой остановке теодолитами снимались отсчеты и записывались в журнал наблюдений. Обработка результатов измерений проводилась по вышеуказанной методике.
Исходя из расчетной формулы и точности используемых теодолитов, среднее квадратичное отклонение, определяющее качество вращения оси, составило mE1=15.41".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНИВАНИЯ ОТКЛОНЕНИЯ ОТ ПЕРПЕНДИКУЛЯРНОСТИ ДВУХ ОСЕЙ | 2010 |
|
RU2446380C1 |
| АВТОКОЛЛИМАЦИОННЫЙ ТЕОДОЛИТ | 1995 |
|
RU2106600C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| Устройство для поверок геодезических приборов | 1978 |
|
SU763682A1 |
| УСТРОЙСТВО ДЛЯ АТТЕСТАЦИИ СИСТЕМЫ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНЫХ УГЛОВ ТЕОДОЛИТА | 1995 |
|
RU2116626C1 |
| Способ взаимного ориентирования осей вращения трех теодолитов | 1985 |
|
SU1318786A1 |
| СПОСОБ КАЛИБРОВКИ ОПТИКО-ЭЛЕКТРОННОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2635336C2 |
| Система для определения погрешности направления визирования телескопа | 1985 |
|
SU1335805A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКОГО АЗИМУТА | 2007 |
|
RU2347252C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ И ВЕРТИКАЛЬНЫХ УГЛОВ ГЕОДЕЗИЧЕСКИХ УГЛОМЕРНЫХ ПРИБОРОВ | 2011 |
|
RU2463561C1 |

Способ включает использование двух автоколлимационных теодолитов и многогранной зеркальной призмы, которую устанавливают в горизонтальной плоскости, совмещая ее центр с вертикальной осью вращения. Теодолиты наводят на грани многогранной призмы так, чтобы их визирные оси были на одном уровне с многогранной призмой и образовывали между собой угол 90°. При каждой j-ой установке, где j=1,2,…, n - количество граней призмы, вертикальной оси измеряют углы наклона соответствующих граней призмы при прямом и обратном направлении вращения оси. Значение углов считывают по вертикальному кругу теодолита при совмещении сетки теодолита с ее автоколлимационным изображением. Значения координат V1j, V2j вектора возмущений вертикальной оси рассчитывают по формуле:  ,
,  а значения координат B1j, B2j вектора биений - по формуле: B1,j=xjпр
-xjобр, B2,j=yjпр
-yjобр, где: xj - значение угла наклона j-ой грани, соответствующей первому теодолиту, и измеренное им при прямом и обратном направлении вращения оси; yj - значение угла наклона j-ой грани, соответствующей второму теодолиту, и измеренное им при прямом и обратном направлении вращения оси. Технический результат - упрощение и уменьшение времени, необходимого на расчет возмущений и биений вертикальных осей. 4 ил.
а значения координат B1j, B2j вектора биений - по формуле: B1,j=xjпр
-xjобр, B2,j=yjпр
-yjобр, где: xj - значение угла наклона j-ой грани, соответствующей первому теодолиту, и измеренное им при прямом и обратном направлении вращения оси; yj - значение угла наклона j-ой грани, соответствующей второму теодолиту, и измеренное им при прямом и обратном направлении вращения оси. Технический результат - упрощение и уменьшение времени, необходимого на расчет возмущений и биений вертикальных осей. 4 ил.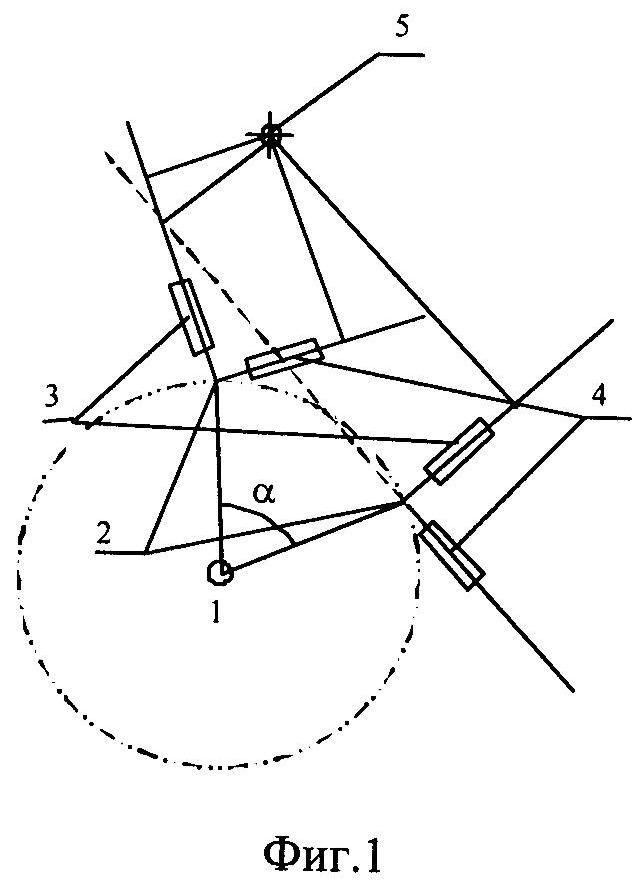
Способ определения возмущений и биений вертикальной оси опорно-поворотного устройства, заключающийся в том, что используют два прибора, измеряющих угловые координаты, при этом в процессе измерений проходят рабочий диапазон вращения вертикальной оси в прямом и обратном направлении с остановками через равные интервалы углов поворота и снимают показания углов наклона, отличающийся тем, что в измерительную систему вводят многогранную зеркальную призму, которую устанавливают в горизонтальной плоскости, совмещая ее центр с вертикальной осью вращения, а в качестве приборов, измеряющих угловые координаты, используют два автоколлимационных теодолита, при этом теодолиты наводят на грани многогранной призмы, причем располагают их таким образом, чтобы визирные оси теодолитов были на одном уровне с многогранной призмой и образовывали между собой угол, равный 90°, и при каждой j-ой установке (где j=1,2,…,n - количество граней призмы) вертикальной оси теодолитами измеряют углы наклона соответствующих граней призмы при прямом и обратном направлении вращения оси, значение углов считывают по вертикальному кругу теодолита при совмещении сетки теодолита с ее автоколлимационным изображением, тогда значения координат (V1j, V2j) вектора возмущений вертикальной оси рассчитывают по формуле:
а значения координат (B1j, B2j) вектора биений вертикальной оси рассчитывают по формуле:
B1,j=xjпр
-xjобр
B2,j=yjпр
-yjобр,
где:
xj - значение угла наклона j-ой грани, соответствующей первому теодолиту, и измеренное им при прямом и обратном направлении вращения оси;
yj - значение угла наклона j-ой грани, соответствующей второму теодолиту, и измеренное им при прямом и обратном направлении вращения оси.
| Грызулин С.И | |||
| Юстировка оптических трактов, М., Макс Пресс, 2011, с.100-102 | |||
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПРОДОЛЬНЫХ И ПОПЕРЕЧНЫХ СМЕЩЕНИЙ | 1992 |
|
RU2054626C1 |
| Устройство для контроля угла пово-POTA плАТфОРМы | 1979 |
|
SU796655A1 |
| US 20080130428 A1, 05.06.2008 | |||

