Изобретение относится к области геодезического приборостроения и может быть использовано при установке геодезического прибора в рабочее положение, а именно при центрировании прибора с целью исключения погрешности центрирования в измеряемых прибором величинах. Преимущественное использование изобретения - в электронных геодезических приборах, например электронных тахеометрах, светодальномерах, кодовых теодолитах, в лазерных приборах, задающих горизонтальные направления, и др., для центрирования отражателей, визирных марок и целей. Помимо этого изобретение может быть использовано и при центрировании оптических приборов, в основном - теодолитов.
Известен способ измерения горизонтальных углов с автоматическим центрированием теодолита и сигналов, включающий центрирование теодолита и подставок в наблюдаемых точках, последовательную перестановку теодолита и сигналов в подставках (см. Борщ-Компониец В.И., Навитний A.M., Кныш Г.М. Маркшейдерское дело. Учебник для техникумов. - М.: Недра, 1985, с.119-120).
Недостатком известного способа является сравнительно высокая трудоемкость производства измерений, а также использование для измерений нескольких штативов с целью переустановки на них теодолита и сигналов.
Известен также способ центрирования геодезического прибора с помощью оптического центрира, при котором штатив устанавливают так, чтобы одна из его ножек оказалась на некотором удалении от точки, в которой производится центрирование, а за две другие ножки штатив перемещают, добиваясь расположения вертикальной оси оптического центирира вблизи точки центрирования и наблюдая за горизонтальностью положения головки штатива. После окончания предварительной установки штатива его ножки укрепляют, продолжая центрирование прибора при вдавливании их в землю. Затем, ослабив становой винт, измерительный прибор перемещают на головке штатива до совмещения центра сетки оптического центрира с точкой центрирования (см., например, Федоров В.И., Титов А.И., Холдобаев В.А. Практикум по инженерной геодезии и аэрогеодезии: Учебное пособие для вузов. - М.: Недра, 1987, с.56, § 21).
Недостатками указанного способа являются следующие: сравнительно большие затраты времени при вынужденном центрировании методом последовательных приближений, поскольку при каждом приведении вертикальной оси вращения измерительного прибора в отвесное положение нарушается горизонтирование прибора. В свою очередь, горизонтирование прибора приводит к нарушению выполненного центрирования и т.д. Кроме этого, остается неизвестным влияние остаточной величины погрешности центрирования.
Заявителям известен способ аналитического центрирования измерительного прибора, выбранный в качестве прототипа, который включает предварительную, а затем окончательную установку измерительного прибора в рабочее положение, при этом окончательная установка в рабочее положение, центрирование прибора, выполняется аналитически путем измерения линейного и углового элементов погрешности центрирования и вычисления поправок в измеряемые прибором величины с учетом величин элементов погрешности центрирования (см. патент RU 2383862 С1, выданный на основании заявки №2008128890/28 (035627) от 14.07.2008 г.).
Недостатком указанного способа является необходимость непосредственного измерения элементов погрешности центрирования, что должно выполняться отдельно для каждого из элементов. Это увеличивает трудоемкость центрирования.
Известны устройства для центрирования геодезических приборов и оборудования, содержащие посадочные места для однозначной установки измерительных средств, чем обеспечивается центрирование с высокой точностью (см. Геодезические методы исследования деформаций сооружений/ А.К.Зайцев, С.В.Марфенко, Д.Ш.Михелев и др. - М.: Недра, 1991, с.29-32).
Недостатком указанных устройств является необходимость их стационарного закрепления на специальных устойчивых основаниях, что исключает возможность их использования при производстве массовых измерений.
Известны устройства для автоматического центрирования теодолита и сигналов (визирных целей), состоящие из зрительной трубы, вращательно соединенной с баксой, которая вставляется во втулку подставки углоизмерительного прибора или сигнала, двух накрест расположенных цилиндрических уровней, прикрепленных к баксе. При использовании указанного устройства выполняют нивелирование и центрирование подставки, установленной на штатив, в которую устанавливают затем измерительный прибор или сигнал (см. Гусев Н.А. Маркшейдерско-геодезические инструменты и приборы. - М.: Недра, 1968, с.304-306).
Недостатком указанных устройств является длительный процесс центрирования, включающий переустановку оборудования, а также влияние на точность измерений остаточной неизвестной погрешности центрирования.
Известен оптический центрир, состоящий из зрительной трубы, ось которой совмещена с вертикальной осью вращения прибора, сетки, призмы, изменяющей направление оси зрительной трубы, при этом плоскость, образованная осью зрительной трубы, совпадает с коллимационной плоскостью прибора либо образует с ней известный угол (см., например, Захаров А.И. Геодезические приборы: Справочник. - М.: Недра, 1989, с.46, рис.26, рис.27).
Недостатком известного оптического центрира является то, что он не позволяет измерять и, тем самым, учитывать величины погрешностей центрирования, в результате чего требуется выполнять тщательную установку измерительного прибора над фиксированной точкой местности, что приводит к значительным затратам времени. Кроме того, даже после тщательного центрирования остаточная погрешность центрирования, особенно при точных и высокоточных измерениях на коротких расстояниях в стесненных условиях, сказывается на точности измерения направлений (отсчетов по горизонтальному кругу прибора), горизонтальных углов и расстояний и является для наблюдателя неизвестной.
Заявителям известно устройство для центрирования измерительного прибора, взятое в качестве прототипа, которое содержит оптический центрир, включающий в себя зрительную трубу, ось которой совмещена с вертикальной осью вращения измерительного прибора, а коллимационная плоскость зрительной трубы совмещена с коллимационной плоскостью измерительного прибора либо образует с ней известный угол. Указанная зрительная труба содержит микрометр с оптическим элементом, связанным с барабаном микрометра. Оптический элемент микрометра установлен с возможностью перемещения относительно оси зрительной трубы центрира. Кроме этого, указанное известное устройство содержит электронную систему регистрации и обработки информации, которая выполняет аналитические расчеты поправок в измеренные прибором величины с учетом измеренных величин линейного и углового элементов погрешности центрирования (см. патент RU 2383862 С1, выданный на основании заявки №2008128890/28(035627) от 14.07.2008 г.).
Недостатком известного устройства (прототипа) является необходимость механического раздельного измерения линейного и углового элементов погрешности центрирования. Кроме того, при вычислениях линейного элемента погрешности центрирования необходимо вводить поправки в само значение линейного элемента из-за изменений паспортной высоты измерительного прибора в точке, в которой производится установка его в рабочее положение.
Для устранения указанных недостатков предлагается способ центрирования измерительного прибора аналитическим методом редуцирования измеренных прибором величин с учетом линейного и углового элементов погрешности центрирования, включающий предварительную установку измерительного прибора в рабочее положение, заключающуюся в горизонтировании, а именно в приведении вертикальной оси вращения прибора в отвесное положение, предварительном центрировании прибора в зафиксированной на местности точке, а именно в приведении изображения зафиксированной на местности точки в поле зрения оптического центрира прибора и в измерении величин, предусмотренных назначением прибора. Окончательная установка измерительного прибора в рабочее положение определяется в заявленном способе при соблюдении горизонтирования аналитическим совмещением отвесного положения вертикальной оси вращения прибора с зафиксированной на местности точкой, в которой выполняется центрирование. Для этого производится измерение высоты измерительного прибора, измерение линейного и углового элементов погрешности центрирования, определяемых соответственно как расстояние в горизонтальной плоскости между зафиксированной на местности точкой, в которой выполняют центрирование, и проекцией вертикальной оси вращения измерительного прибора, положение которой определяется из первоначального исходного положения прибора, и углом между направлением линейного элемента погрешности центрирования и выбранным при установке прибора в рабочее положение исходным направлением. Особенностью предлагаемого способа является то, что после предварительного горизонтирования и центрирования измерительного прибора фиксируют его исходное положение, в том числе относительно выбранного исходного направления, совпадающего, например, с одной из измеряемых линий или с одной из сторон измеряемого горизонтального угла или направления, затем подъемными винтами подставки измерительного прибора либо перемещениями визирной оси зрительной трубы центрира измерительного прибора совмещают вертикальную ось вращения прибора либо визирную ось его центрира с зафиксированной на местности точкой, в которой выполняется центрирование. Далее фиксируют полученное положение измерительного прибора либо его центрира относительно первоначального исходного положения, вычисляют линейный и угловой элементы погрешности центрирования, вычисляют поправки в измеренные прибором величины с учетом значений элементов погрешности центрирования, вычисляют определяемые величины (расстояния, горизонтальные углы, направления и др.).
Сущность способа, использование которого устраняет влияние погрешности центрирования прибора на точность измеряемых величин, а также конструкции устройств с учетом различных вариантов датчиков отклонения вертикальной оси вращения измерительного прибора, предназначенных для осуществления заявляемого способа, поясняются на схемах, приведенных на фиг.1, 2, 3, 4 и 5.
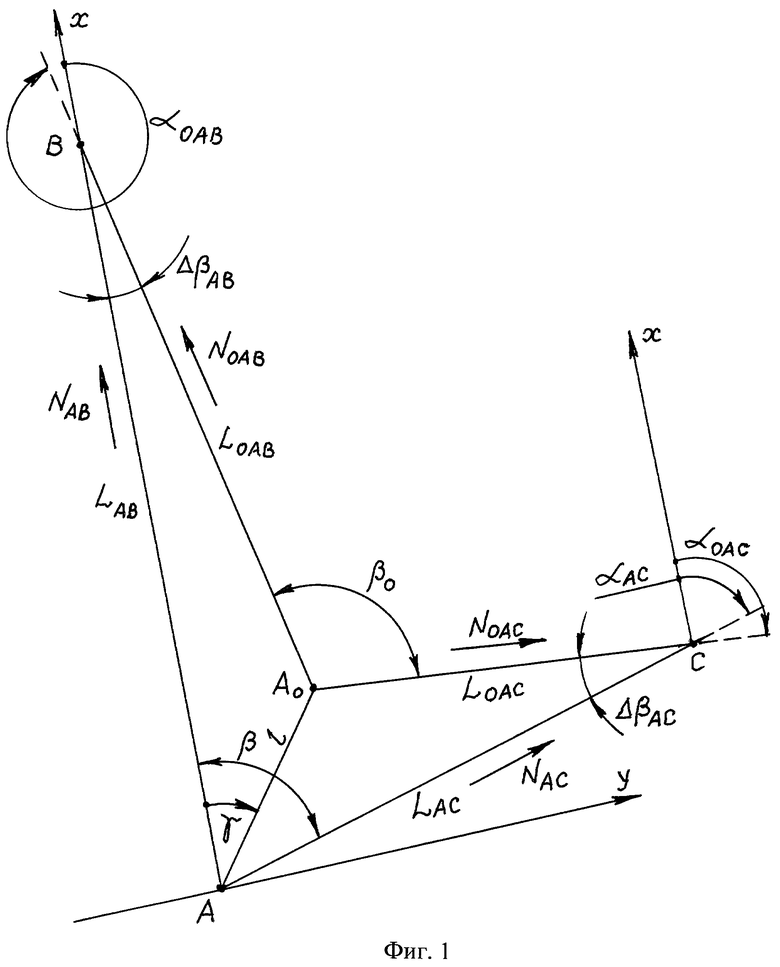
Обозначения, использованные на фиг.1:
- xAy - условная прямоугольная система координат, ось х которой ориентирована по проекции на горизонтальную плоскость стороны измеряемого угла, расстояния или направления, определяемого отсчетом по горизонтальному кругу измерительного прибора;
- AO - точка, зафиксированная на местности, в которой производится центрирование геодезического прибора;
- A - точка, являющаяся фактической проекцией вертикальной оси вращения измерительного прибора;
- B и C - точки, на которые выполняется визирование измерительным прибором при производстве измерений;
- l - линейный элемент погрешности центрирования;
- γ - угловой элемент погрешности центрирования;
- N и NO с индексами стороны измеряемого горизонтального угла (направления) - соответственно измеренное и определяемое направления;
- β и βO - соответственно измеренный и определяемый горизонтальные углы, вычисляемые как разности соответствующих направлений;
- L и LO с индексами направлений - соответственно измеренное и определяемое расстояния;
- ΔβAB и ΔβAC - угловые поправки в измеренные направления, соответственно в NAB и NAC;
- αOAB и αOAC - условные дирекционные углы соответствующих сторон определяемого горизонтального угла (направления) в принятой условной системе прямоугольных координат;
- αAC - условный дирекционный угол фактического направления линии АС в принятой условной системе прямоугольных координат.
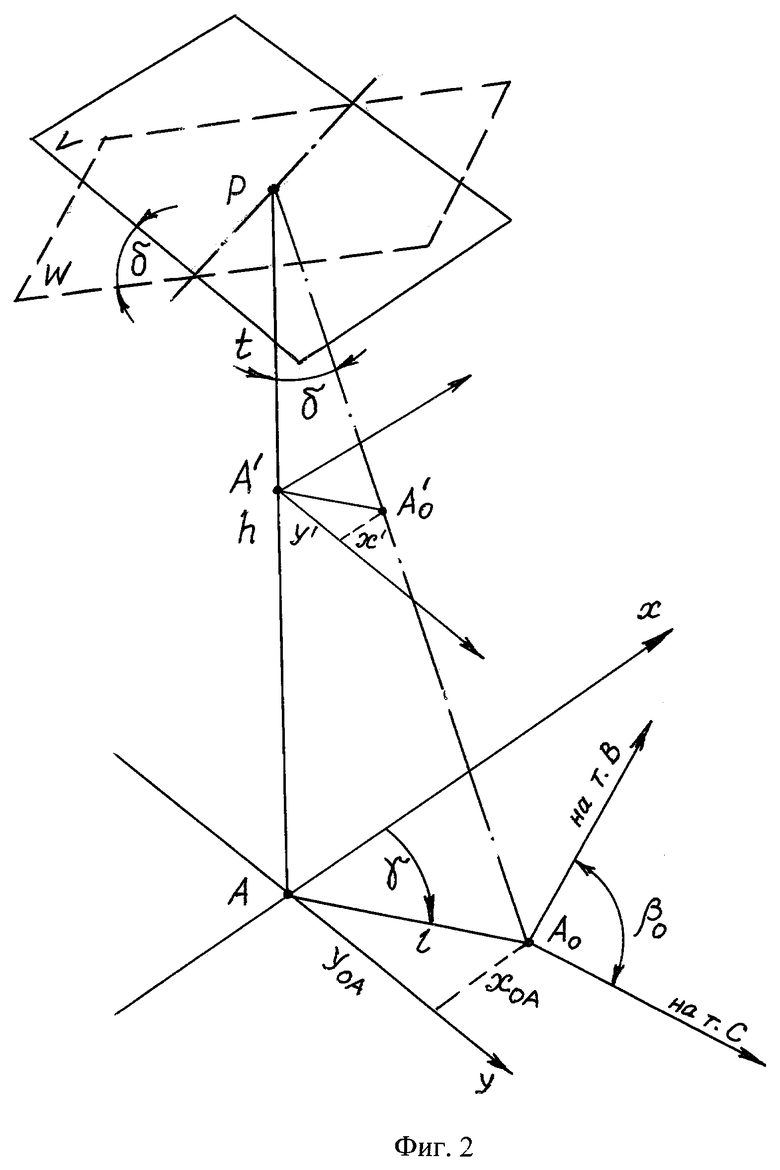
Обозначения на фиг.2.
A, AO, xAy, l, γ, βO - соответствуют обозначениям, приведенным на фиг.1. Дополнительные обозначения:
P - точка на вертикальной оси вращения измерительного прибора, относительно которой происходит отклонение указанной оси вращения при наведении визирной оси центрира прибора на зафиксированную на местности точку AO;
h=РА - высота измерительного прибора, определяемая по отвесной линии расстоянием между точкой Р и точкой AO;
δ - угол отклонения вертикальной оси вращения измерительного прибора при наведении визирной оси центрира в точку AO;
V - горизонтальная плоскость, параллельная плоскости прямоугольной системы координат xAy; проходит на высоте h от точки AO через точку P;
W - плоскость, перпендикулярная к вертикальной оси вращения прибора после направления ее на точку AO; параллельна плоскости горизонтального круга измерительного прибора; соответствует плоскости V, отклоненной от первоначального положения на угол δ; проходит через точку Р;
x' и y' - показания датчика 2 (фиг.3) отклонений вертикальной оси вращения измерительного прибора соответственно по оси Ax и по оси Ay выбранной условной системы прямоугольных координат xAy;
t=PA' - плечо датчика 2 (фиг.3).
Обозначения на фиг.3:
1 - измерительный прибор;
2 - датчик отклонений вертикальной оси вращения измерительного прибора;
3 - аналоговый блок вычисления линейного и углового элементов погрешности центрирования;
4 - блок ввода высоты измерительного прибора;
5 - блок регистрации линейного элемента погрешности центрирования;
6 - блок регистрации углового элемента погрешности центрирования;
7 - блок регистрации измеренных расстояний;
8 - аналоговый блок вычисления координат;
9 - блок регистрации измеренных горизонтальных углов;
10 - аналоговый блок вычисления дирекционных углов;
11 - блок вычисления поправок в измеренные направления;
12 - аналоговый блок вычисления определяемых расстояний;
13 - блок вычисления определяемых горизонтальных углов;
14 - блок вычисления определяемых направлений;
15 - блок регистрации измеренных направлений;
16 - блок регистрации определяемых расстояний;
17 - блок регистрации определяемых горизонтальных углов;
18 - блок регистрации определяемых направлений;
19 - запоминающее устройство.
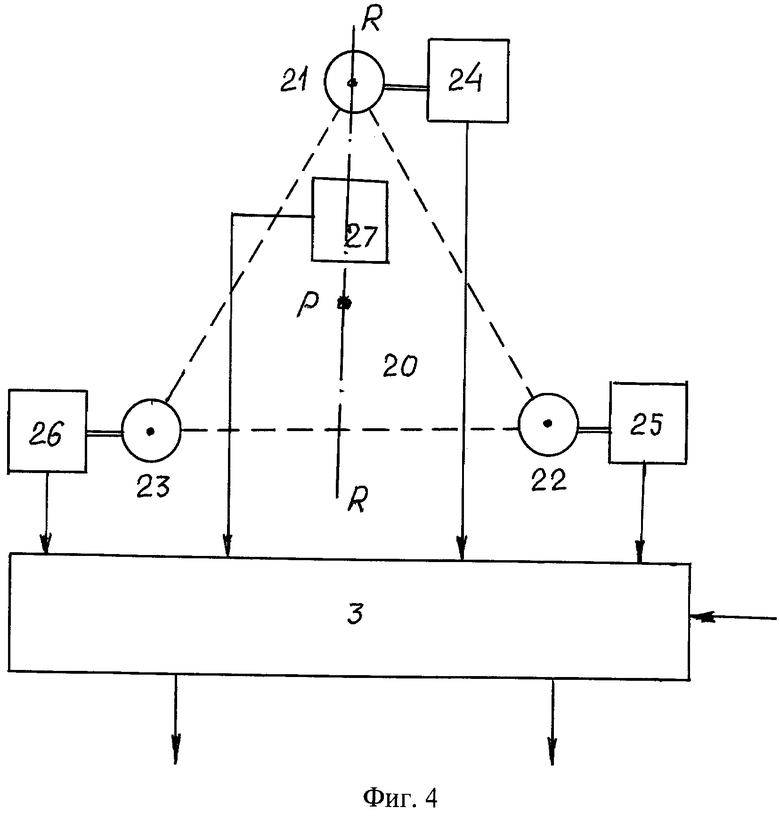
Обозначения на фиг.4:
поз. P - см. обозначение на фиг.2;
поз. 3 - см. обозначение на фиг.3;
20 - подставка измерительного прибора;
21, 22 и 23 - подъемные винты подставки измерительного прибора;
24, 25 и 26 - кодовые датчики линейных или угловых перемещений подъемных винтов подставки измерительного прибора;
27 - датчик углового положения осей подъемных винтов подставки относительно коллимационной плоскости измерительного прибора;
R-R - след на горизонтальной плоскости от коллимационной плоскости измерительного прибора, совпадающий с осью координат Ax прямоугольной системы координат xAy, установленной, например, в направлении выбранной в качестве исходной стороны измеряемого горизонтального угла.
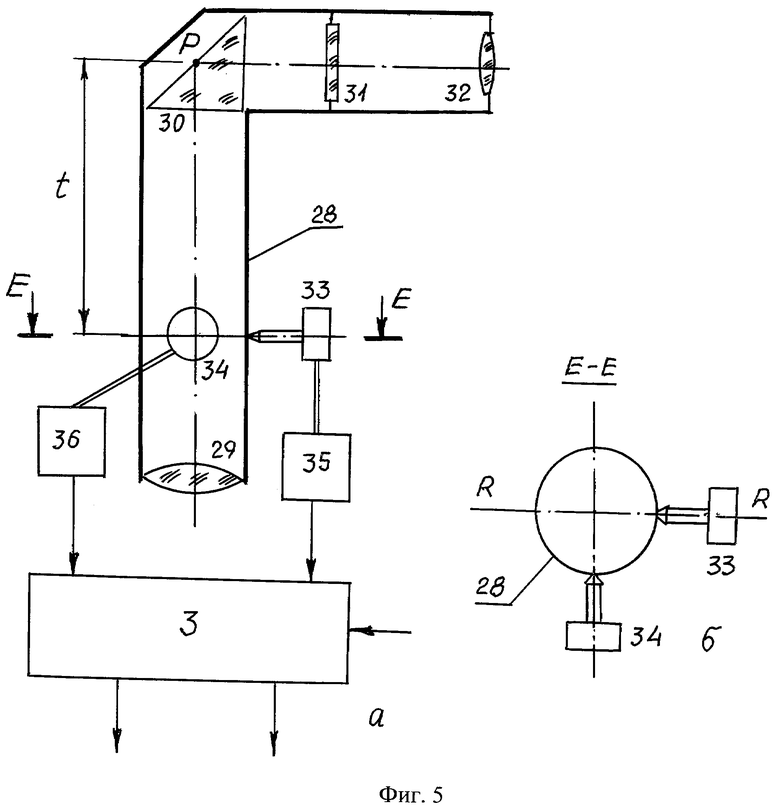
Обозначения на фиг.5:
поз. Р - см. обозначение на фиг.2;
поз. 3 - см. обозначение на фиг.3;
поз. R-R - см. обозначение на фиг.4;
28 - зрительная труба центрира измерительного прибора;
29 - объектив зрительной трубы;
30 - призма, изменяющая направление визирной оси зрительной трубы;
31 - сетка зрительной трубы;
32 - окуляр зрительной трубы;
33 - регулировочный винт положения визирной оси зрительной трубы центрира в коллимационной плоскости зрительной трубы центрира;
34 - регулировочный винт положения визирной оси зрительной трубы центрира в плоскости, перпендикулярной коллимационной плоскости зрительной трубы центрира;
35 и 36 - кодовые датчики линейных или угловых перемещений регулировочных винтов положения визирной оси зрительной трубы центрира;
t - плечо регулировочных винтов, соответствующее расстоянию между осями регулировочных винтов и точкой Р.
Рассмотрим схему, поясняющую аналитическое центрирование измерительного прибора, приведенную на фиг.1.
При измерении горизонтального угла βO и расстояний LOAB и LOAC проекция вертикальной оси вращения измерительного прибора не совпала с вершиной AO измеряемого угла, а оказалась в точке A. При этом были измерены горизонтальный угол β и расстояния LAB и LAC. Соответственно были взяты направления (отсчеты по горизонтальному кругу измерительного прибора) NAB и NAC.
Выберем условную систему координат xAy, ось Ax которой совпадает с направлением AB(NAB).
Из решения прямой геодезической задачи (см., например, Афанасьев В.Г., Егоров А.П. Геодезия и маркшейдерское дело в транспортном строительстве. М.: Недра, 1978, § 14, с.21-23) найдем координаты точек AO, B и C в указанной системе координат (очевидно, что xA=0 и yA=0):

Из решения обратной геодезической задачи найдем условные дирекционные углы αOAB и αOAC определяемых направлений NOAB и NOAC соответственно и определяемые расстояния LOAB и LOAC:
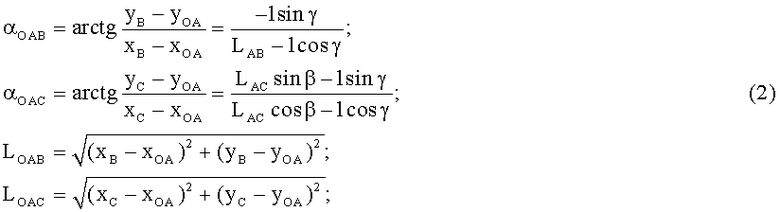
Поправки ΔβAB и ΔβAC в измеренные направления NAB и NAC определяются по разностям соответствующих дирекционных углов:

В формулах (3) αAB=0°(360°), а αAC=β.
Таким образом,

Разность дирекционных углов даст значение определяемого горизонтального угла:

Следует отметить, что возможен выбор двух и более независимых систем прямоугольных координат, оси х которых будут совпадать с соответствующими измеряемыми направлениями. В этих случаях координаты точки AO следует определять во всех выбранных системах координат, а значение определяемых горизонтальных углов вычислять по разностям соответствующих направлений, измеренного и определяемого.
Рассмотрим схему, поясняющую вычисление линейного и углового элементов погрешности центрирования (фиг.2).
После предварительной установки измерительного прибора в точке AO вертикальная ось вращения измерительного прибора РА фактически может оказаться в точке А. При этом плоскость PAx совпадает с коллимационной плоскостью измерительного прибора либо образует с ней известный угол. После совмещения визирной оси измерительного прибора с помощью подъемных винтов подставки с зафиксированной на местности точкой AO, что наблюдается в окуляр 32 зрительной трубы 28 центрира измерительного прибора (фиг.5), угол отклонения δ этой оси (PAO) и угол γ между направлением коллимационной плоскости измерительного прибора и направлением линейного элемента l погрешности центрирования измеряются датчиком отклонений вертикальной оси измерительного прибора. Высота h измерительного прибора составляется расстоянием по отвесной линии между точкой AO и фиксированной механической частью прибора, расстояние от которой до точки P прибора известно по его конструкции и является паспортным его значением. Из геометрических построений, приведенных на фиг.2, найдем:


где x' и y' - измеренные датчиком отклонения его чувствительного элемента по осям Ax и Ay выбранной условной системы прямоугольных координат xAy, пропорциональные координатам точки AO (xOA;yOA) в той же системе координат.
После получения величин линейного и углового элементов погрешности центрирования положение измерительного прибора приводится к первоначальному, соответствующему предварительной его установке в рабочее положение, выполняется измерение расстояний, направлений, горизонтальных углов и вычисление определяемых величин по алгоритму, представленному формулами (1) - (5). Следует отметить, что измерение необходимых величин, предусмотренных назначением прибора, может выполняться непосредственно после предварительной установки измерительного прибора в рабочее положение. Тем самым не будет необходимости в повторном горизонтировании прибора.
Устройство для осуществления центрирования измерительного прибора, схема которого представлена на фиг.3, работает следующим образом.
После предварительной установки измерительного прибора 1 (его горизонтировании, т.е. приведении вертикальной оси вращения в отвесное положение, и предварительном центрировании, т.е. в приведении изображения зафиксированной на местности точки, в которой выполняется центрирование, в поле зрения центрира измерительного прибора), фиксируют указанную предварительную установку, заключающуюся в ориентировании коллимационной плоскости измерительного прибора на выбранное на местности исходное направление, совпадающее, например, с одной из сторон измеряемого горизонтального угла, что регистрируется значением измеренного направления, и регистрации показаний датчика 2 отклонений вертикальной оси вращения измерительного прибора. Далее выполняют измерение расстояний, горизонтальных углов, направлений и их регистрацию. Затем, например, подъемными винтами подставки измерительного прибора либо регулировочными винтами зрительной трубы центрира прибора совмещают вертикальную ось вращения прибора с зафиксированной на местности точкой AO. После этого датчик 2 регистрирует полученное отклонение вертикальной оси вращения прибора относительно ее исходного положения и направления коллимационной плоскости измерительного прибора. Аналоговый блок 3 вычисления линейного и углового элементов погрешности центрирования, установленный с возможностью приема сигналов от датчика 2 и из блока 4 ввода высоты измерительного прибора, производит обработку информации, поступившей с датчика 2 и из блока 4. Значение углового элемента погрешности центрирования определяется по показанию датчика 2 как угол γ между коллимационной плоскостью измерительного прибора и плоскостью APAO, в которой лежит отрезок l линейного элемента погрешности центрирования (см. фиг.2). Значение линейного элемента погрешности центрирования вычисляется в блоке 3 по формуле (6), а значение углового элемента погрешности центрирования - по формуле (7). Блок 3 установлен с возможностью передачи информации в блоки 5 и 6 регистрации линейного и углового элементов погрешности центрирования. Аналоговый блок 8 установлен с возможностью приема сигналов из блоков 5 и 6, а также из блоков 7 (регистрации измеренных расстояний) и 9 (регистрации измеренного горизонтального угла), и передачи сигналов в аналоговые блоки 10 (вычисления дирекционных углов) и 12 (вычисления определяемых расстояний). По алгоритму, представленному формулами (1), в блоке 8 производится вычисление координат точек в принятой условной системе координат. В блоках 10 и 12 по алгоритму, представленному формулами (2), производится вычисление дирекционных углов и определяемых расстояний. Блок 10 установлен с возможностью передачи сигнала в блок 11 вычисления поправок в измеренные направления, а также с возможностью передачи сигналов в блок 13 вычисления определяемых горизонтальных углов, что осуществляется по формуле (5) разности дирекционных углов. Для вычисления поправок в измеренные направления блок 11 установлен с возможностью приема сигнала из блока 9 (регистрации измеренных горизонтальных углов) и передачи сигнала в блок 14 (вычисления определяемых направлений). В блоке 11 выполняется вычисление разностей дирекционных углов по формуле (3). Блок 14, в свою очередь, установлен с возможностью приема сигнала из блока 15 регистрации измеренных направлений. Вычисление определяемых направлений производится по формуле (4) разности измеренного направления и его поправки. Блоки 12, 13 и 14 установлены с возможностью передачи сигналов в соответствующие блоки 16 (регистрации определяемых расстояний), 17 (регистрации определяемого горизонтального угла) и 18 (регистрации определяемых направлений). Далее информация с блоков 16, 17 и 18 поступает в запоминающее устройство 19, которое установлено с возможностью приема информации с указанных блоков.
Датчик отклонений вертикальной оси вращения измерительного прибора от отвесного положения может быть выполнен двухосевым, отслеживающим наклон прибора по двум осям, Ax и Ay. Подобные датчики размещают в современных электронных тахеометрах и цифровых теодолитах (см., например, Дементьев В.Е. Современная геодезическая техника и ее применение: Учебное пособие для вузов. - Изд. 2-е. - М.: Академический Проект, 2008, гл. 2, разд. 2.10, с.159). При разработке конструкции указанного датчика необходимо увеличить диапазон его измерений до 2°.
Одну из осей указанного датчика необходимо совместить с положением коллимационной плоскости измерительного прибора либо установить по отношению к ней под известным углом.
Датчик может располагаться в любой части измерительного прибора, в том числе и непосредственно на центрире измерительного прибора.
Во втором варианте упомянутого датчика его функции совмещены с подъемными винтами подставки измерительного прибора, для чего подъемные винты снабжены кодовыми датчиками линейных или угловых перемещений (см. фиг.4), а группа подъемных винтов снабжена датчиком их положения в горизонтальной плоскости относительно коллимационной плоскости R-R измерительного прибора. Для этого достаточно только одного указанного датчика положения подъемных винтов, поскольку конструктивно взаимное расположение осей подъемных винтов известно.
Для функционирования датчика 2 отклонений вертикальной оси вращения измерительного прибора аналоговый блок 3 вычисления линейного и углового элементов погрешности центрирования установлен с возможностью приема сигналов от кодовых датчиков 24, 25 и 26 подъемных винтов 21, 22 и 23 подставки 20 измерительного прибора и сигнала от датчика 27 положения осей подъемных винтов относительно коллимационной плоскости измерительного прибора.
Рассмотрим работу предлагаемого датчика.
После предварительной установки измерительного прибора в рабочее положение электронная система фиксирует показания кодовых датчиков 24, 25 и 26, регистрирующих линейные или угловые перемещения подъемных винтов 21, 22 и 23 и показание датчика 27 положения коллимационной плоскости прибора, ориентированной по выбранному исходному направлению, относительно осей подъемных винтов. Выполняют измерение величин, предусмотренных назначением прибора. Далее подъемными винтами 21, 22 и 23 подставки 20 приводят вертикальную ось (РА) вращения измерительного прибора в направление на зафиксированную на местности точку AO, в которой выполняют центрирование измерительного прибора (см. фиг.2). Повторно блок 3 фиксирует показания кодовых датчиков подъемных винтов. Далее в блоке 3 выполняется вычисление линейного и углового элементов погрешности центрирования с учетом разностей показаний кодовых датчиков при предварительной и окончательной установках прибора и показаний датчика отклонения вертикальной оси вращения прибора. Последующая обработка информации аналогична приведенной выше.
В соответствии с приемами решения задач в аналитической геометрии (см., например, Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. Изд. 7-е стереотип.- М.: Гос. изд. технико-технич. литературы, 1957, разд. Б, п.9, с.221-227), плоскость V может быть представлена уравнением

Поскольку в данном случае A1=0, B1=0, C1=1, то уравнение данной плоскости можно записать в виде

в котором D1=-h.
Уравнение плоскости W также может быть записано как в виде

так и в координатной форме, как уравнение плоскости, проходящей через три точки: M1(x1;y1;z1), M2(x2;y2;z2), M3(x3;y3;z3); то есть в матричной форме:

Точки M1, M2, M3 соответствуют трем подъемным винтам подставки измерительного прибора. Их координаты x и y определяются по геометрическим параметрам подставки и положению коллимационной плоскости измерительного прибора в выбранной условной системе прямоугольных координат. При предварительной установке измерительного прибора в рабочее положение указанные координаты определяются однозначно и не меняются на данной станции в процессе производства измерений. Координаты z указанных точек M получают по показаниям кодовых датчиков подъемных винтов подставки измерительного прибора как разности отсчетов m:

где m - отсчеты по кодовым датчикам подъемных винтов подставки после совмещения вертикальной оси вращения измерительного прибора с зафиксированной на местности точкой AO, в которой выполняют центрирование; mO - отсчеты по кодовым датчикам подъемных винтов подставки после выполнения предварительной установки измерительного прибора в рабочее положение.
Из решения матрицы (11) получают значения искомых коэффициентов A2, B2, C2 и D2 уравнения (10).
Угол между плоскостями V и W определяется из выражения:

С учетом полученных выше значений коэффициентов уравнений можно записать для рассматриваемого случая:

Алгоритм определения угла отклонения δ вертикальной оси вращения измерительного прибора от отвесного положения, которое она принимала при предварительной установке измерительного прибора в рабочее положение, реализуется в аналоговом блоке 3 устройства. В этом же блоке выполняется и вычисление линейного элемента погрешности центрирования по формуле (6).
Угловой элемент погрешности центрирования находится исходя из следующих соображений.
Уравнение нормали к плоскости W, проходящей через точку P(xP;yP;zP), имеет вид (с учетом того, что xP=0, yP=0 и zP=h):

Из решения уравнения (15) и уравнения плоскости xAy, в которой располагается выбранная условная система прямоугольных координат, получают значения координат xOA и yOA точки AO (см. фиг.2). Далее, подстановкой полученных координат в формулу (7) вычисляют значение углового элемента погрешности центрирования.
Указанный алгоритм вычисления углового элемента погрешности центрирования также реализуется в аналоговом блоке 3 устройства.
Контрольное вычисление линейного элемента погрешности центрирования может быть выполнено по формуле

Датчик 2 (фиг.3) отклонений вертикальной оси вращения измерительного прибора, как один из его возможных вариантов, может быть также функционально совмещен со зрительной трубой центрира измерительного прибора. На фиг.5 представлена схема упомянутого датчика. Зрительная труба 28 центрира установлена с возможностью угловых перемещений относительно вертикальной оси вращения измерительного прибора, для чего снабжена двумя регулировочными винтами 33 и 34, ось одного из которых, например винта 33, расположена в коллимационной плоскости измерительного прибора либо образует с ней известный угол, а ось второго регулировочного винта 34 перпендикулярна к оси первого регулировочного винта (фиг.5б). Каждый из регулировочных винтов снабжен кодовым датчиком 35 и 36 линейных или угловых перемещений регулировочных винтов, при этом кодовые датчики установлены с возможностью передачи сигнала в аналоговый блок 3 вычисления линейного и углового элементов погрешности центрирования. Коллимационная плоскость зрительной трубы 28 центрира совмещена с коллимационной плоскостью измерительного прибора либо образует с ней известный угол.
Датчик работает следующим образом.
При предварительной установке измерительного прибора в рабочее положение визирная ось зрительной трубы центрира, определяемая отвесной линией в точке P, совпадает с вертикальной осью вращения измерительного прибора. При этом регистрируются показания кодовых датчиков: nO35 и nO36. Здесь рассматривается случай, когда ось регулировочного винта 33 совпадает с коллимационной плоскостью зрительной трубы центрира (и измерительного прибора). После выполнения измерений, предусмотренных назначением прибора, регулировочными винтами 33 и 34 выполняют наведение визирной оси зрительной трубы центрира на зафиксированную на местности точку AO, в которой выполняется центрирование. Фиксируют новые показания кодовых датчиков: n35 и n36.
Разницы показаний каждого из датчиков, переведенные в линейную меру перемещения регулировочных винтов и умноженные на масштабный коэффициент, равный отношению высоты измерительного прибора к плечу регулировочных винтов, даст величины прямоугольных координат точки AO в выбранной условной системе прямоугольных координат xAy:

где h - высота измерительного прибора; t - плечо регулировочных винтов, равное расстоянию от точки P до оси регулировочного винта (значение t является паспортным для данного измерительного прибора).
По формулам (16) и (7) в аналоговом блоке 3 производится вычисление соответственно линейного и углового элементов погрешности центрирования.
Дальнейшая обработка информации выполняется по алгоритму, представленному выше.
Использование способа центрирования с приведенным алгоритмом аналитического редуцирования измеряемых величин с учетом погрешностей центрирования позволит значительно уменьшить трудоемкость при установке измерительного прибора, поскольку величины линейных элементов центрирования не устраняют путем механических действий с прибором, а определяют их величины и соответствующее угловое положение непосредственно в процессе измерений относительно выбранной стороны измеряемого горизонтального угла, принимаемой за исходную, и исключают влияние погрешности центрирования введением соответствующих поправок во все измеренные величины, определяемые назначением прибора. Точность центрирования методом аналитического редуцирования определяется не величинами элементов погрешности центрирования, а только погрешностями определения этих элементов. Как показывает анализ формулы (6), при значениях высоты прибора, равных 1-1,5 м, отклонениях вертикальной оси вращения измерительного прибора, равных 1°-1,5°, высоту измерительного прибора достаточно измерять с точностью до 3-5 мм, а отклонение вертикальной оси вращения измерительного прибора с точностью до 20”-30”, что технически легко осуществить. При этом требуемая величина погрешности измерения линейного элемента погрешности центрирования составит не более 0,3 мм для приведенных выше исходных данных.
Требования к необходимой точности измерения линейного элемента погрешности центрирования практически определяются требованиями к точности измеряемых величин и не зависят от величины самого линейного элемента. Поскольку величины поправок Δβ в измеренные направления малые, то влияние погрешности центрирования на одно направление (отсчет) можно оценить по формуле

где l - линейный элемент погрешности центрирования; γ - угловой элемент погрешности центрирования; L - длина направления (стороны измеряемого угла); ρ - число секунд в радиане, равное 206265”.
С учетом малого влияния на величину Δβ погрешности измерения углового элемента центрирования, а также погрешности измерения расстояния можно записать для погрешности поправки в направление, что

где ml - погрешность измерения линейного элемента погрешности центрирования.
Поскольку измеряемый горизонтальный угол образован двумя сторонами, то в общем случае можно принять, что погрешность в измеренном угле из-за погрешности измерения линейного элемента составит  .
.
С другой стороны, следуя принципу «ничтожной погрешности», доля  в погрешности измерения горизонтального угла должна составить
в погрешности измерения горизонтального угла должна составить

где mβ - заданная точность измерения горизонтального угла; λ - коэффициент, характеризующий допустимую долю одной из погрешностей, составляющих общую погрешность измерений какой-либо величины. Чаще всего принимают λ=3.
С учетом (19) и (20) можно записать для ml.

Предположим, что измеряется горизонтальный угол, близкий к 180° (худшие условия), стороны угла равны 50 м каждая, λ=3, γ=90°, заданная точность измерения горизонтального угла - 5”. Для указанных условий измерений ml=0,3 мм.
Обеспечение в данном случае центрирования с точностью 0,3 мм практически осуществить достаточно трудно, однако измерить линейный элемент с такой точностью технически осуществимо, даже с большей, чем получено в примере, точностью.
Реализация способа центрирования измерительного прибора методом редуцирования измеренных величин с учетом величин и положения относительно коллимационной плоскости измерительного прибора элементов погрешности центрирования позволит сократить время на качественную установку прибора в рабочее положение и значительно повысить точность измерений. При этом предварительное центрирование должно лишь обеспечить попадание изображения точки, в которой производится центрирование прибора, в поле зрения сетки зрительной трубы центрира.
Изобретение относится к области геодезического приборостроения и может быть использовано при установке геодезического прибора в рабочее положение, а именно при центрировании прибора с целью исключения погрешности центрирования в измеряемых прибором величинах. Техническим результатом изобретения является сокращение времени на качественную установку прибора в рабочее положение и повышение точности измерений. Способ центрирования измерительного прибора включает предварительную установку измерительного прибора в рабочее положение, заключающуюся в горизонтировании, предварительное центрирование прибора в зафиксированной на местности точке, измерение высоты измерительного прибора, измерение величин, окончательную установку прибора в рабочее положение, определяемую при соблюдении горизонтирования, измерение линейного и углового элементов погрешности центрирования. После предварительного горизонтирования и центрирования прибора фиксируют его исходное положение. Затем подъемными винтами подставки измерительного прибора либо перемещениями визирной оси зрительной трубы центрира измерительного прибора совмещают вертикальную ось вращения прибора либо визирную ось его центрира с зафиксированной на местности точкой. Фиксируют полученное положение измерительного прибора либо его центрира относительно первоначального исходного положения, вычисляют линейный и угловой элементы погрешности центрирования. Вычисляют поправки в измеренных прибором величинах с учетом значений элементов погрешности центрирования и вычисляют определяемые величины. Устройство для центрирования измерительного прибора содержит подставку с подъемными винтами, центрир со зрительной трубой, электронную систему регистрации и обработки информации. Измерительный прибор снабжен датчиком отклонений вертикальной оси вращения измерительного прибора от ее отвесного положения. Электронная система регистрации и обработки информации содержит блок ввода высоты измерительного прибора, аналоговый блок вычисления линейного и углового элементов погрешности центрирования, блок регистрации линейного элемента погрешности центрирования, блок регистрации углового элемента погрешности центрирования, аналоговый блок вычисления координат, блок регистрации измеренных расстояний, блок регистрации измеренных горизонтальных углов, аналоговый блок вычисления дирекционных углов, блок вычисления поправок в измеренные направления, аналоговый блок вычисления определяемых расстояний, блок вычисления определяемых горизонтальных углов, блок регистрации измеренных направлений, блок вычисления определяемых направлений, блок регистрации определяемых расстояний, блок регистрации определяемых горизонтальных углов, блок регистрации определяемых направлений и запоминающее устройство. 2 н. и 2 з.п. ф-лы, 5 ил.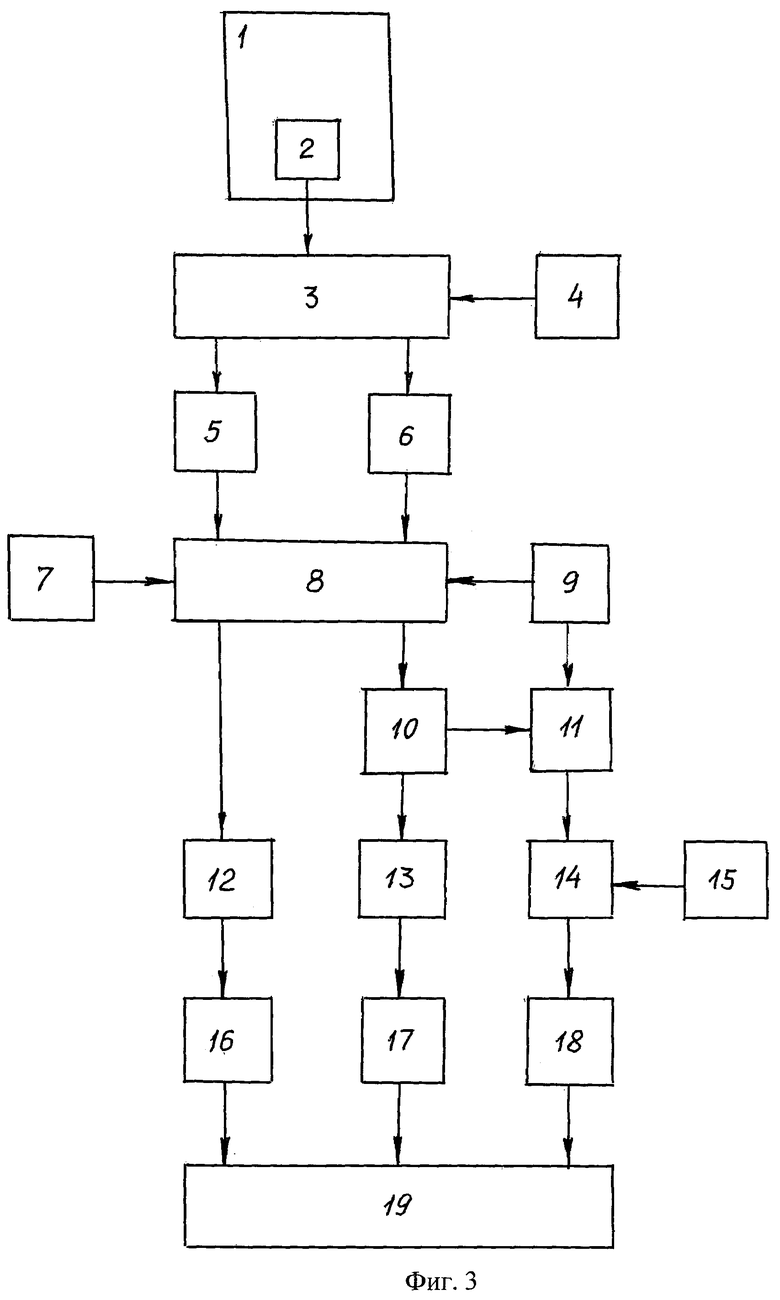
1. Способ центрирования измерительного прибора, преимущественно геодезического, в частности электронного тахеометра, включающий предварительную установку измерительного прибора в рабочее положение, заключающуюся в горизонтировании, а именно в приведении вертикальной оси вращения прибора в отвесное положение, предварительном центрировании прибора в зафиксированной на местности точке, а именно в приведении изображения зафиксированной на местности точки в поле зрения оптического центрира прибора, измерение высоты измерительного прибора, измерение величин, предусмотренных назначением измерительного прибора, окончательную установку прибора в рабочее положение, определяемую при соблюдении горизонтирования аналитическим совмещением отвесного положения вертикальной оси вращения прибора с зафиксированной на местности точкой, измерение линейного и углового элементов погрешности центрирования, определяемых соответственно как расстояние в горизонтальной плоскости между зафиксированной на местности точкой, в которой выполняют центрирование, и проекцией вертикальной оси вращения измерительного прибора, положение которой определяется из первоначального исходного положения прибора, и углом между направлением линейного элемента погрешности центрирования и выбранном при установке прибора в рабочее положение исходным направлением, отличающийся тем, что после предварительного горизонтирования и центрирования прибора фиксируют его исходное положение, в том числе относительно выбранного исходного направления, совпадающего, например, с одной из измеряемых линий или с одной из сторон измеряемого горизонтального угла или направления, затем подъемными винтами подставки измерительного прибора либо перемещениями визирной оси зрительной трубы центрира измерительного прибора совмещают вертикальную ось вращения прибора либо визирную ось его центрира с зафиксированной на местности точкой, в которой выполняется центрирование, фиксируют полученное положение измерительного прибора либо его центрира относительно первоначального исходного положения, вычисляют линейный и угловой элементы погрешности центрирования, вычисляют поправки в измеренные прибором величины с учетом значений элементов погрешности центрирования и вычисляют определяемые величины.
2. Устройство для центрирования измерительного прибора, преимущественно геодезического, в частности электронного тахеометра, содержащее подставку с подъемными винтами, центрир со зрительной трубой, коллимационная плоскость которой совмещена с коллимационной плоскостью измерительного прибора либо образует с ней известный угол, электронную систему регистрации и обработки информации, отличающееся тем, что измерительный прибор снабжен датчиком отклонений вертикальной оси вращения измерительного прибора от ее отвесного положения, ориентированным относительно коллимационной плоскости измерительного прибора, а электронная система регистрации и обработки информации содержит блок ввода высоты измерительного прибора, аналоговый блок вычисления линейного и углового элементов погрешности центрирования, блок регистрации линейного элемента погрешности центрирования, блок регистрации углового элемента погрешности центрирования, аналоговый блок вычисления координат, блок регистрации измеренных расстояний, блок регистрации измеренных горизонтальных углов, аналоговый блок вычисления дирекционных углов, блок вычисления поправок в измеренные направления, аналоговый блок вычисления определяемых расстояний, блок вычисления определяемых горизонтальных углов, блок регистрации измеренных направлений, блок вычисления определяемых направлений, блок регистрации определяемых расстояний, блок регистрации определяемых горизонтальных углов, блок регистрации определяемых направлений и запоминающее устройство, при этом аналоговый блок вычисления линейного и углового элементов погрешности центрирования установлен с возможностью получения сигналов от датчика отклонений вертикальной оси вращения измерительного прибора и блока ввода высоты измерительного прибора и передачи сигнала в блок регистрации линейного элемента погрешности центрирования и в блок регистрации углового элемента погрешности центрирования, упомянутый аналоговый блок вычисления координат установлен с возможностью получения информации из блоков регистрации линейного и углового элементов погрешности центрирования, блока регистрации измеренных расстояний, блока регистрации измеренных горизонтальных углов и передачи сигнала в аналоговый блок вычисления определяемых расстояний и в аналоговый блок вычисления дирекционных углов, который установлен с возможностью передачи сигнала в блок вычисления поправок в измеренные направления и в блок вычисления определяемых горизонтальных углов, при этом блок вычисления поправок в измеренные направления установлен с возможностью приема сигнала из блока регистрации измеренных горизонтальных углов и передачи сигнала в блок вычисления определяемых направлений, который установлен с возможностью приема сигнала из блока регистрации измеренных направлений и передачи сигнала в блок регистрации определяемых направлений, упомянутые аналоговый блок вычисления определяемых расстояний и блок вычисления определяемых горизонтальных углов установлены с возможностью передачи сигнала в блок регистрации определяемых расстояний и в блок регистрации определяемых горизонтальных углов соответственно, а запоминающее устройство установлено с возможностью приема информации из блока регистрации определяемых расстояний, блока регистрации определяемых горизонтальных углов и блока регистрации определяемых направлений.
3. Устройство по п.2, отличающееся тем, что датчик отклонений ветрикальной оси вращения прибора функционально совмещен с подъемными винтами подставки измерительного прибора, при этом подъемные винты подставки снабжены кодовыми датчиками линейных или угловых перемещений, регистрирующими линейные или угловые перемещения подъемных винтов, а также упомянутая группа подъемных винтов снабжена датчиком углового положения осей подъемных винтов в горизонтальной плоскости относительно коллимационной плоскости измерительного прибора, при этом аналоговый блок вычисления координат установлен с возможностью приема сигналов от кодовых датчиков подъемных винтов, а также датчика положения осей подъемных винтов относительно коллимационной плоскости измерительного прибора.
4. Устройство по п.2, отличающееся тем, что датчик отклонений вертикальной оси вращения прибора функционально совмещен со зрительной трубой центрира измерительного прибора, при этом зрительная труба центрира измерительного прибора установлена с возможностью угловых перемещений относительно вертикальной оси вращения измерительного прибора и снабжена регулировочными винтами, которые оснащены кодовыми датчиками линейных или угловых перемещений, регистрирующими линейные перемещения или повороты регулировочных винтов, при этом оси регулировочных винтов выполнены перпендикулярно друг к другу, причем ось одного из регулировочных винтов расположена в коллимационной плоскости измерительного прибора либо образует с ней известный угол, а аналоговый блок вычисления линейного и углового элементов погрешности центрирования установлен с возможностью приема сигналов от кодовых датчиков регулировочных винтов зрительной трубы центрира.
| Устройство для центрирования геодезического прибора | 1982 |
|
SU1080011A1 |
| Устройство для центрирования геоде-зичЕСКиХ пРибОРОВ | 1979 |
|
SU853391A1 |
| Центрировочное устройство | 1977 |
|
SU652441A1 |
| ЦЕНТРИРУЮЩИЙ ШТАТИВ | 1995 |
|
RU2087792C1 |
| ЦЕНТРИРУЮЩИЙ ШТАТИВ ДЛЯ УСТАНОВКИ ГЕОДЕЗИЧЕСКОГО ПРИБОРА НА ГОЛОВКЕ РЕЛЬСА А.М.РУСКОВА | 1992 |
|
RU2032147C1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ИЗМЕРИТЕЛЬНОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2383862C1 |

