Объектом изобретения является способ дифференциальной импульсно-кодовой модуляции - демодуляции (ДИКМД) сигналов. Предлагаемый способ относится к радиотехнике и связи, поскольку класс задач модуляции-демодуляции этого типа составляет основу организации передачи и приема сигналов во многих цифровых как радиотехнических, так и проводных информационных системах.
Известен способ ДИКМД сигналов [1]. Его недостатком является ориентированность на работу с незашумленными информационными процессами. Если наблюдаемый сигнал представляет из себя сумму информационного сигнала и шумовой (как правило, широкополосной) помехи, то для использования такого способа необходимо предусмотреть специальные меры по проведению предварительной фильтрации. Сам способ не обеспечивает снижение дисперсии помехи при восстановлении сигнала на приемной стороне.
Известен также способ ДИКМД [2], заключающийся в формировании последовательности отсчетов информационного сигнала на основании его дискретизации с частотой  , предсказании с шагом h их оценок, формировании сигналов ошибки путем вычитания из отсчетов информационного сигнала их предсказанных оценок, квантовании сигналов ошибки, их кодировании, восстановлении квантованных сигналов ошибки после передачи в канале, предсказании оценок отсчетов информационного сигнала на приемной стороне, уточнении этих оценок по принятым квантованным сигналам ошибки, формировании восстанавливаемого непрерывного информационного сигнала по уточненным оценкам отсчетов.
, предсказании с шагом h их оценок, формировании сигналов ошибки путем вычитания из отсчетов информационного сигнала их предсказанных оценок, квантовании сигналов ошибки, их кодировании, восстановлении квантованных сигналов ошибки после передачи в канале, предсказании оценок отсчетов информационного сигнала на приемной стороне, уточнении этих оценок по принятым квантованным сигналам ошибки, формировании восстанавливаемого непрерывного информационного сигнала по уточненным оценкам отсчетов.
Он также ориентирован на обработку незашумленных информационных сигналов, когда последние наблюдаются непосредственно, а не на фоне помех. Для наблюдаемого процесса, представляющего композицию информационного сигнала и шума, этот способ не позволяет снижать влияние помехи на восстанавливаемый на приемной стороне информационный процесс. Действительно, при формировании сигнала ошибки предсказанные отсчеты информационного сигнала вычитаются из наблюдаемого сигнала (композиции информационного процесса и шума). В результате сигнал ошибки помимо информационной содержит еще и помеховую составляющую с дисперсией, определяемой дисперсией входного шума.
В результате входная помеха практически без изменения передается на приемную сторону.
Цель изобретения: повышение помехоустойчивости за счет совмещения процессов дифференциальной импульсно-кодовой модуляции-демодуляции и фильтрации на основе общей для этих двух классов задач процедуры предсказания оценок сигналов.
Сущность изобретения основана на использовании в задаче ДИКМД кусочно-полиномиального (сплайнового) представления оценок информационного сигнала. Такое описание адекватно отражает процесс импульсно-кодовой модуляции-демодуляции, подразумевающий преобразование непрерывного сигнала в дискретный и дискретного - в непрерывный.
Сущность изобретения состоит в следующем. Для каждого интервала времени [ti, ti+1], ti+1>ti i=0, 1, 2, … проводится предсказание коэффициентов сплайн-аппроксимации информационного сигнала. С их помощью на каждом интервале времени [ti, ti+1], i=0, 1, 2, … генерируется оценка этого сигнала в виде процесса, меняющегося по полиномиальному закону. Полученная оценка вычитается из входного сигнала. Результаты вычитания усредняются на [ti, ti+1], i=0, 1, 2, …. Результаты этого усреднения, служащие сигналами ошибки, используются для уточнения предсказанных оценок коэффициентов сплайн-аппроксимации. Сигналы ошибки квантуются, кодируются и передаются в канал. После передачи в канале на приемной стороне квантованные сигналы ошибки восстанавливаются. Для каждого интервала времени [ti, ti+1], i=0, 1, 2, … проводится предсказание оценок коэффициентов сплайн-аппроксимации восстанавливаемого информационного сигнала и их уточнение по восстановленным квантованным сигналам ошибки. По уточненным оценкам коэффициентов генерируется восстанавливаемый информационный сигнал в виде непрерывного кусочно-полиномиального процесса.
Сравнительный анализ заявляемого способа и описанного способа ДИКМД показывает следующие существенные отличия заявляемого способа.
Этап модуляции.
1. Предсказание информационного сигнала осуществляется в два этапа:
- по априорным данным об информационном сигнале для каждого интервала времени [ti, ti+1], i=0, 1, 2, … проводится экстраполяция коэффициентов его сплайнового представления;
- по этим коэффициентам на каждом интервале времени [ti, ti+1], i=0, 1, 2, … осуществляется предсказание оценки сплайн-аппроксимации информационного сигнала.
В результате предсказывается не мгновенное значение оценки информационного сигнала, как в известном способе, а его непрерывная на [ti, ti+1] оценка, в виде процесса, меняющегося по полиномиальному закону.
2. Сигнал ошибки формируется путем вычитания на каждом интервале [ti, ti+1] из входного сигнала предсказанной для этого интервала оценки информационного сигнала и усреднения на [ti, ti+1] полученной разности.
В результате в отличие от известного способа сигнал ошибки определяется не для мгновенных значений наблюдаемого сигнала и предсказанной оценки информационного сигнала, а на основании операции усреднения, т.е. сигнал ошибки носит интегральный характер.
Этап демодуляции.
1. По априорным данным об информационном сигнале осуществляется предсказание оценок коэффициентов его сплайн-аппроксимации.
2. Предсказанные значения оценок коэффициентов уточняются на основании принятого квантованного сигнала ошибки.
3. По уточненным коэффициентам сплайн-аппроксимации генерируется восстанавливаемый непрерывный информационный сигнал в виде кусочно-полиномиального процесса.
Поскольку восстановление информационного сигнала основано на использовании усредненного по времени сигнала ошибки, влияние помехи, содержащейся в наблюдаемом процессе, существенно ослабляется.
Теоретическое обоснование способа дифференциальной импульсно-кодовой модуляции - демодуляции сигналов.
При решении задач ДИКМД, как правило, исходят из предположения о том, что информационный сигнал наблюдается непосредственно без шумов. Однако на практике часто встречаются ситуации, когда входной сигнал представляет из себя композицию (как правило, аддитивную) информационного сигнала и помехи (обычно широкополосной). В этом случае вначале необходимо решение задачи фильтрации, а уже потом модуляции.
Вместе с тем, как процедура дифференциальной импульсно-кодовой модуляции (цифрового кодирования с предсказанием), так и процедура фильтрации, предполагают реализацию операции предсказания или экстраполяции оценки информационного сигнала [1, 2, 3].
Это дает возможность объединить фильтрацию и ДИКМД на основе общей процедуры предсказания. В результате дифференциальный импульсно-кодовый модулятор приобретает свойства фильтра и позволяет снизить влияние помех, содержащихся во входном сигнале, на сигнал, восстанавливаемый на приемной стороне.
Исходя из специфики ДИКМД, состоящей в дискретизации с заданной частотой непрерывного сигнала, необходимо использовать класс моделей, обладающих непрерывно-дискретной структурой. Наиболее эффективным в этом классе является аппарат сплайн-функций.
Обычно информационный сигнал λ1(t) рассматривается как компонента векторного процесса λ(t)∈Rm [3], удовлетворяющего дифференциальному уравнению

где A∈Rm×m; nλ∈Rr; g∈Rm×r; nλ(t) - векторный формирующий гауссовский шум; М[nλ(t)]=0;  ; λT(t)=[λ1(t),λ2(t),…,λn(t)]; Nλ∈Rr×r - диагональная матрица. Примерами, иллюстрирующими (1), могут служить [3]:
; λT(t)=[λ1(t),λ2(t),…,λn(t)]; Nλ∈Rr×r - диагональная матрица. Примерами, иллюстрирующими (1), могут служить [3]:
- модель речевого сообщения λ1(t), являющаяся компонентой марковского процесса
где α1, α2 - константы, определяющие ширину полосы частот λ1(t);
- модель телеметрического сообщения λ1(t), определяемого уравнениями

- модель узкополосного сообщения λ1(t), соответствующая системе

где χ=const>0 и др.
Рассмотрим наблюдаемый сигнал, который связан с информационным соотношением

где n(t) - гауссовская широкополосная помеха, у которой M[n(t)]=0; M[n(t)n(t-τ)]=N0δ(τ).
Для определения последовательности операций, соответствующих ДИКМД информационного сигнала λ1(t), наблюдаемого на фоне шума в соответствии с (5), воспользуемся принципами фильтрации.
Процедура фильтрации процесса (1) (а следовательно, и его компоненты λ1(t)) имеет вид [3]


где К - матрица весовых коэффициентов, определяемая как результат решения матричного алгебраического уравнения

H∈Rm; h=[1.0…0]
Введем на временной оси две сетки


где ti+1-ti=h;  , i=-2, -1, 0, 1, ….
, i=-2, -1, 0, 1, ….
Рассмотрим интервал времени [ti, ti+h], i=0, 1, 2, … Для него представим оценку λ*(t) в виде векторной параболической сплайн-функции [4]

где Si - параболический вектор-сплайн дефекта 1;
bi∈(i=-1, 0, 1, …) - вектор коэффициентов сплайна.
Выбор параболических сплайн-функций обусловлен компромиссом между точностью представления аппроксимируемых процессов и сложностью их реализации.
Представим (6) в терминах (9). В результате для t∈[ti, ti+h] получим:
- предсказанные (экстраполированные) оценки коэффициентов сплайн-аппроксимации информационного сигнала

где 
 ,
,
I - единичная матрица (m×m);
- предсказанную (экстраполированную) оценку информационного сигнала в виде процесса, меняющегося по полиномиальному (в данном случае параболическому) закону

где b1 - первый элемент вектора b;
- усредненный сигнал ошибки

- уточненное значение вектора 

где  .
.
Отметим, что начальные условия в (10) определяются из начальных условий в (6).
Совокупность операций (10)-(13), дополненная квантованием сигнала ошибки δi→δквi; и его кодированием, составляют сущность дифференциальной импульсно-кодовой модуляции, лежащую в основе заявляемого способа ДИКМД.
Процесс демодуляции основан на (10)-(13) и состоит в следующем:
проводят предсказание оценок коэффициентов сплайн-аппроксимации информационного сигнала на приемной стороне

- на основании полученного после декодирования значения δквi оценку  уточняют
уточняют

- по значениям коэффициентов  ,
,  ,
,  на [ti, ti+h] восстанавливают непрерывный информационный сигнал
на [ti, ti+h] восстанавливают непрерывный информационный сигнал

Отметим, что в силу сплайнового представления восстановленный информационный сигнал вместе с его первыми производными является непрерывным на всем интервале времени своего существования.
Результаты вычислительного эксперимента
Рассмотрим пример ДИКМД применительно к узкополосному сообщению λ1(t), определяемому моделью (4). В среде MathCAD был проведен вычислительный эксперимент по дифференциальной импульсно-кодовой модуляции-демодуляции, основанной на операциях (10)-(16) для наблюдаемого сигнала, заданного (5).
Полагалось, что α=1200, χ=2·104, Nλ=10-7, N0=109, t∈[0,T],
Т=0.1, h=(4, 8, 10, 16, 20, 25, 32)·10-6. Все параметры приведены в безразмерных единицах.
Значения λ1(t) и λ2(t) определялись из численного решения уравнения (4) в соответствии со схемой Эйлера и шагом Δt=5·10-7.
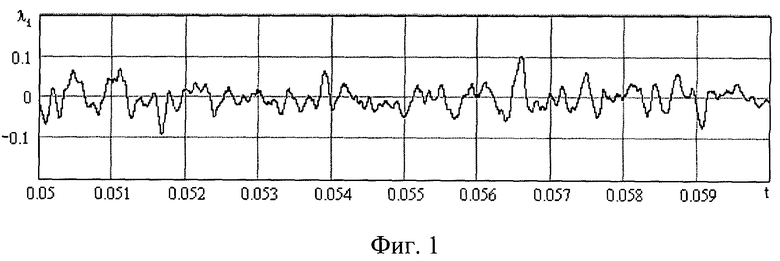
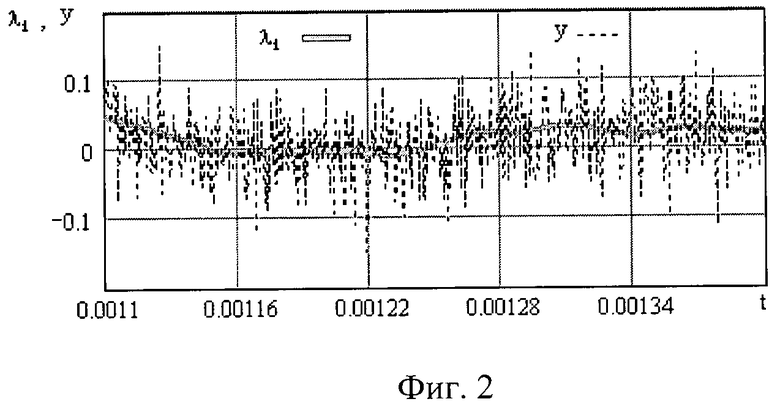
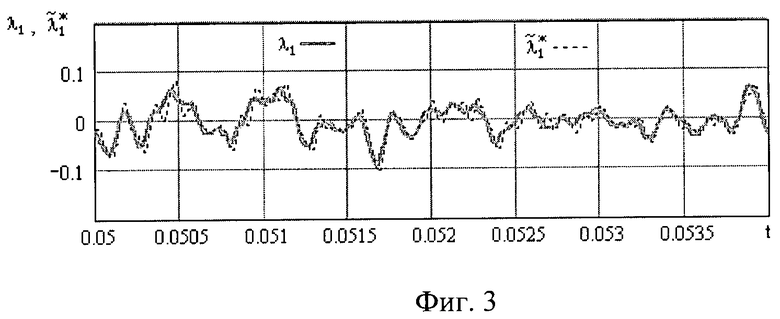
Формирование nλ(t) в (4) и n(t) в (5) проводилось с помощью датчиков нормально распределенных случайных чисел. Число уровней квантования при переходе δi(t)→δквi(t) полагалось равным М=15, 31. Ошибки квантования задавались с помощью датчика равномерно распределенных случайных чисел. На Фигуре 1 представлен фрагмент информационного сигнала λ1(t). На Фигуре 2 представлены фрагменты информационного λ1(t) и наблюдаемого y(t) сигналов. Очевидно, что применять непосредственно к y(t) способы ДИКМД, рассмотренные в [1, 2], нельзя. На Фигуре 3 показаны фрагменты информационного сигнала λ1(t) и сигнала  , восстановленного на приемной стороне (М=31, h=20·10-6). Они оказываются достаточно близкими. Для оценки степени этой близости, то есть качества предлагаемого способа ДИКМД, был проведен расчет зависимости относительной дисперсии оценки восстановленного на приемной стороне процесса
, восстановленного на приемной стороне (М=31, h=20·10-6). Они оказываются достаточно близкими. Для оценки степени этой близости, то есть качества предлагаемого способа ДИКМД, был проведен расчет зависимости относительной дисперсии оценки восстановленного на приемной стороне процесса 

где  , U=T/Δt,
, U=T/Δt,  , λ1j=λ1(jΔt),
, λ1j=λ1(jΔt),  - априорная дисперсия λ1(t)
- априорная дисперсия λ1(t)
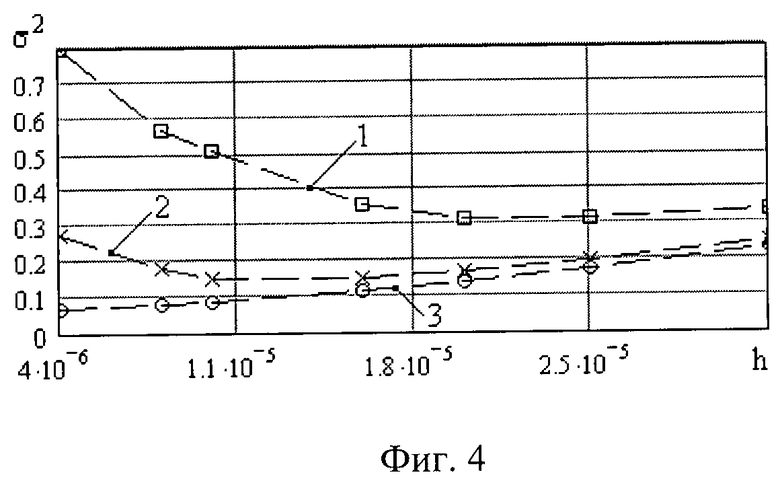
от шага h (Фигура 4) при М=15 (кривая 1) и М=31 (кривая 2). Кривая 3 на этом же графике характеризует зависимость от h относительной дисперсии оценки информационного сигнала, который может быть сформирован на передающей стороне в соответствии с соотношением

Она является нижней гранью, к которой стремятся зависимости (17) по мере роста М. Из графиков следует, что для каждого М может быть выбрана оптимальная величина hопт шага сплайн-аппроксимации, обеспечивающая минимальное значение погрешности восстановления информационного сигнала. Вогнутый характер кривых 1, 2 обусловлен, с одной стороны, снижением точности сплайн-аппроксимации по мере роста h, а с другой - увеличением по мере уменьшения шага h влияния на точность оценки  ошибок квантования.
ошибок квантования.
Определим - насколько возрастает помехоустойчивость предлагаемого способа ДИКМД по сравнению со способом-прототипом [2]. Еще раз отметим, что при использовании способа-прототипа шумовая составляющая, содержащаяся в наблюдаемом сигнале (6), не подавляется. В условиях примера ее дисперсия составляет (см. Фиг.2)

Дисперсия оценки восстанавливаемого сигнала для h=hопт=1,6·105, М=31 оказалось равной (см. Фиг.4, кривая 2)

где  (см. Фиг.1).
(см. Фиг.1).
Относительный выигрыш в помехоустойчивости составил

Полученный выигрыш обусловлен наличием в процедуре формирования сигнала ошибки операции усреднения (12), обеспечивающей существенное снижение влияния на качество восстановления сигнала широкополосной помехи, на фоне которой наблюдается информационный сигнал.
Структурная схема устройства, реализующего способ ДИКМД, представлена на Фигуре 5.
На Фигуре 5 использованы следующие обозначения: 1 - первый сумматор; 2 - генератор предсказываемой оценки сигнала; 3 - блок вычитания; 4 - блок усреднения; 5 - блок выборки-хранения; 6 - аналого-цифровой преобразователь (АЦП); 7 - канал связи; 8 - цифроаналоговый преобразователь; 9 - второй блок определения поправки; 10 - третий сумматор; 11 - генератор восстановленной оценки сигнала; 12 - второй блок преобразования; 13 - четвертый сумматор; 14 - второй блок задержки; 15 - четвертый блок задержки; 16 - первый блок преобразования; 17 - третий блок преобразования; 18 - первый блок задержки; 19 - третий блок задержки; 20 - второй сумматор; 21 - первый блок определения поправки; 22 - четвертый блок преобразования.
Входной сигнал поступает на вход 32 блока вычитания 3. На вход 31 этого же блока подается предсказываемая оценка информационного сигнала в виде полиномиального на каждом интервале времени [ti, ti+h] процесса. Эта оценка формируется в генераторе 2 предсказываемой оценки сигнала на основании i-го (выход первого блока задержки 18) (i-1)-го (выход второго блока задержки 14) и (i+1)-го предсказанного (выход первого сумматора 1) коэффициентов сплайн-аппроксимации. Указанные коэффициенты подаются соответственно на входы 23, 22 и 21 блока 2. Экстраполяция (предсказание) (i+1)-го коэффициента проводится путем суммирования в сумматоре 1 i-го коэффициента сплайн-аппроксимации, преобразованного в первом блоке преобразования 16 и (i-1)-го коэффициента преобразованного во втором блоке преобразования 12. Указанные блоки реализуют операции умножения вектора на матрицы, соответствующие процедуре (10).
В блоке 3 для каждого интервала [ti, ti+h] формируется разностный сигнал, поступающий на вход 41 блока усреднения 4. Результаты усреднения разностного сигнала поступают на вход 51 блока 5 выборки-хранения и по управляющему импульсу на входе 52, формируемому в конце каждого интервала, фиксируются и запоминаются. Таким образом, на выходе блока 5 формируется сигнал ошибки. Выходной сигнал блока 5 поступает на вход первого блока определения поправки 21, в котором сигнал ошибки преобразуется в вектор поправки путем домножения его на вектор F3 в (13). Во втором сумматоре 20 предсказанное (i+1)-е значение коэффициента, поступающее на вход 201 блока 20, уточняется за счет добавления к нему вектора поправки, поступающего на вход 202. Уточненное значение (i+1)-го коэффициента подается на вход блока задержки 18, выход которого, кроме входа 23 сумматора 2, соединен также со входом блока задержки 14 и входом блока преобразования 16. Блоки задержки осуществляют задержку на величину шага предсказания h.
Сигналы ошибок с выхода блока 5 поступают на вход АЦП 6, где происходит их квантование и преобразование в кодовые последовательности. Эти кодовые последовательности передаются в канал 7, выход которого соединен со входом ЦАП 8. На выходе ЦАП 8 из кодовых последовательностей восстанавливаются квантованные значения сигналов ошибок, поступающие на второй блок определения поправок 9. Принцип его функционирования аналогичен принципу функционирования первого блока определения поправок 21. На его выходе по принятому квантованному сигналу ошибки формируется вектор поправки, подаваемый на вход 101 третьего сумматора 10. Одновременно на его вход 102 с выхода четвертого сумматора 13 подается предсказанное значение (i+1)-го коэффициента сплайн-аппроксимации приемной стороны. В результате на выходе сумматора 10 формируется восстановленная по принятому сигналу ошибки оценка (i+1)-го коэффициента сплайн-аппроксимации, используемая наряду с i-м и (i-1)-м коэффициентами для генерации восстановленной оценки сигнала в генераторе 11. Кроме того, оценка (i+1)-го коэффициента подается на вход четвертого блока задержки 15. Выход этого блока в свою очередь соединен со входом третьего блока задержки 19.
Блоки задержки 15 и 19 аналогичны блокам 14, 18. Выходные сигналы с выходов блоков 15, 19 подаются соответственно на входы третьего 17 и четвертого 22 блоков преобразования, выходы которых соединены с входами 132 и 131). Структура блоков 17, 22 идентична структуре блоков соответственно 16, 12. Выход генератора 11 является выходом устройства. На нем формируется оценка восстановленного после передачи и демодуляции информационного сигнала в виде кусочно-полиномиального процесса сплайнового типа.
Функции блоков: блок 1 - суммирование двух векторов в соответствии с (10); блок 2 - генерация на каждом интервале времени [ti fi+h) предсказываемой (экстраполируемой) оценки информационного сигнала в виде полиномиальной зависимости (11) на основании значений коэффициентов b1i-1, b1i,  ,; блок 3 - формирование на [ti, ti+h] разности наблюдаемого и экстраполируемого процесса; блок 4 - усреднение по времени на [ti, ti+h] разностного сигнала в соответствии с (12); блок 5 - выборка и хранение результатов усреднения; блок 6 - квантование сигнала ошибки и его кодирование; блок 7 - передача кода на приемную сторону; блок 8 - формирование квантованного сигнала ошибки; блок 9 - определение сигнала поправки путем домножения квантованного сигнала ошибки на вектор F3, (значение F3 определено в (13)); блок 10 - суммирование двух векторов в соответствии с (15); блок 11 - генерация восстанавливаемого информационного сигнала в соответствии с (16) по восстановленным коэффициентам
,; блок 3 - формирование на [ti, ti+h] разности наблюдаемого и экстраполируемого процесса; блок 4 - усреднение по времени на [ti, ti+h] разностного сигнала в соответствии с (12); блок 5 - выборка и хранение результатов усреднения; блок 6 - квантование сигнала ошибки и его кодирование; блок 7 - передача кода на приемную сторону; блок 8 - формирование квантованного сигнала ошибки; блок 9 - определение сигнала поправки путем домножения квантованного сигнала ошибки на вектор F3, (значение F3 определено в (13)); блок 10 - суммирование двух векторов в соответствии с (15); блок 11 - генерация восстанавливаемого информационного сигнала в соответствии с (16) по восстановленным коэффициентам  ,
,  ,
,  ; блок 12 - домножение вектора bi-1 на матрицу F1 (структура F1 определена в (10)); блок 13 - суммирование двух векторов в соответствии с (14); блок 14 - задержка значений bi на время h; блок 15 - задержка значений
; блок 12 - домножение вектора bi-1 на матрицу F1 (структура F1 определена в (10)); блок 13 - суммирование двух векторов в соответствии с (14); блок 14 - задержка значений bi на время h; блок 15 - задержка значений  на время h; блок 16 - домножение вектора bi на матрицу F2 (структура F2 определена в (10)); блок 17 - домножение вектора
на время h; блок 16 - домножение вектора bi на матрицу F2 (структура F2 определена в (10)); блок 17 - домножение вектора  на матрицу F2; блок 18 - задержка значений bi+1 на время h; блок 19 - задержка значений
на матрицу F2; блок 18 - задержка значений bi+1 на время h; блок 19 - задержка значений  на время h; блок 20 - суммирование векторов в соответствии с (13); блок 21 - домножение сигнала ошибки δi на вектор F3; блок 22 - домножение вектора
на время h; блок 20 - суммирование векторов в соответствии с (13); блок 21 - домножение сигнала ошибки δi на вектор F3; блок 22 - домножение вектора  на F1.
на F1.
Источники информации
1. Прокис Дж. Цифровая связь. - М.: Радио и связь, 2000.
2. Помехоустойчивость и эффективность систем передачи информации. / Под ред. А.Г.Зюко. - М.: Радио и связь, 1985.
3. Ярлыков М.С. применение марковской теории нелинейной фильтрации в радиотехнике. - М.: Сов. радио, 1980.
4. Хуторцев В.В., Федоренко О.С. Использование метода сплайн-функций при синтезе цифровых алгоритмов фильтрации с группированием наблюдений. / - Радиотехника, 2010, №2, С.4-8.
Изобретение относится к радиотехнике и связи, а именно для дифференциальной импульсно-кодовой модуляции-демодуляции информационных сигналов. Техническим результатом является повышение помехоустойчивости передачи и приема сигналов. Способ дифференциальной импульсно-кодовой модуляции - демодуляции сигналов, заключающийся в квантовании сигналов ошибки, их кодировании и восстановлении квантованных сигналов ошибки после передачи в канале, при этом для каждого интервала времени [ti, ti+1], ti+1>ti, i=0, 1, 2, … проводят предсказание коэффициентов сплайн-аппроксимации информационного сигнала, уточняют их по восстановленным квантованным сигналам ошибки, генерируют по уточненным оценкам коэффициентов восстанавливаемый информационный сигнал в виде непрерывного кусочно-полиномиального процесса. 5 ил.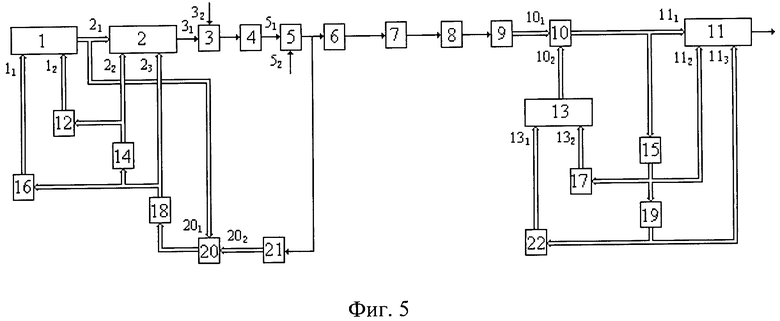
Способ дифференциальной импульсно-кодовой модуляции - демодуляции сигналов, заключающийся в квантовании сигналов ошибки, их кодировании и восстановлении квантованных сигналов ошибки после передачи в канале, отличающийся тем, что для каждого интервала времени [ti, ti+1], ti+1>ti, i=0, 1, 2, … проводят предсказание коэффициентов сплайн-аппроксимации информационного сигнала, с их помощью на каждом интервале времени [ti, ti+1], i=0, 1, 2, … генерируют оценку этого сигнала в виде процесса, меняющегося по полиномиальному закону, вычитают такую оценку из входного сигнала, а результаты вычитания усредняют на [ti, ti+1], результаты усреднения, служащие сигналами ошибки, используют для уточнения предсказанных оценок коэффициентов сплайн-аппроксимации, на приемной стороне для каждого интервала времени [ti, ti+1], i=0, 1, 2, … проводят предсказание оценок коэффициентов сплайн-аппроксимации восстанавливаемого информационного сигнала, уточняют их по восстановленным квантованным сигналам ошибки, генерируют по уточненным оценкам коэффициентов восстанавливаемый информационный сигнал в виде непрерывного кусочно-полиномиального процесса.
| Система передачи телевизионного сигнала с дифференциальной импульсно-кодовой модуляцией | 1988 |
|
SU1575324A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КАЧЕСТВА ЛИНИИ СВЯЗИ КАНАЛА ПЕРЕДАЧИ ДАННЫХ | 2003 |
|
RU2251723C2 |
| ДЕМОДУЛЯТОР СИСТЕМЫ СВЯЗИ С ДВУКРАТНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2008 |
|
RU2376718C1 |
| EP 0671082 A1, 13.09.1995 | |||
| EP 1177640 A1, 06.02.2002. | |||

