Объектом изобретения является способ управления группированием наблюдений при фильтрации частотно-модулированных сигналов. Предлагаемый способ относится к радиотехнике, поскольку задача фильтрации частотно-модулированных сигналов имеет существенное значение для большого класса радиотехнических систем приема и обработки сообщений.
Известен способ управления группированием наблюдений [1]. Его недостатком является отсутствие согласования между режимом дискретизации наблюдений с текущими частотными характеристиками передаваемого сигнала, оцениваемыми в ходе фильтрации.
Отсутствие такого согласования может существенно сказываться на качестве обработки в задачах фильтрации частотно-модулированных сигналов, когда период принимаемых колебаний варьируется в широких пределах, а частота дискретизации остается неизменной.
Известен также способ управления группированием наблюдений [2], заключающийся в предсказании оценки модулирующего сигнала на i-м (i=1, 2, …) интервале экстраполяции длительностью h, определении на этом интервале зависящей от нее производной опорного радиосигнала, синхронной дискретизации по времени этой производной и входного сигнала с частотой F>1/h, не зависящей от оценки модулирующего сигнала, определении их произведений, формировании на i-м интервале экстраполяции сигнала, пропорционального сумме этих произведений, уточнении с ее помощью предсказанной оценки модулирующего сигнала.
Он также не предусматривает согласования между режимом дискретизации и оцениваемыми частотными характеристиками сигнала.
Целью изобретения является повышение точности обработки за счет адаптивного группирования наблюдений в процессе фильтрации частотно-модулированных сигналов.
Сущность изобретения заключается в предсказании оценки модулирующего сигнала на i-м (i=1, 2, …) интервале экстраполяции длительностью h, определении на этом интервале зависящей от нее производной опорного радиосигнала, синхронной дискретизации по времени этой производной и входного сигнала с частотой F>1/h, определении их произведений, формировании на i-м интервале экстраполяции сигнала, пропорционального сумме этих произведений, уточнении с ее помощью предсказанной оценки модулирующего сигнала, модулировании по частоте с помощью предсказанной оценки модулирующего сигнала импульсного сигнала, управляющего процессом дискретизации.
Сравнительный анализ заявляемого способа и описанного способа управления группированием наблюдений показывает следующие существенные отличия заявляемого способа:
1. Вводится управление шагом дискретизации, а следовательно, и частотой дискретизации наблюдений, зависящее от оценки модулирующего процесса;
2. Вводится управление объемом накапливаемой выборки при группировании наблюдений;
3. Способ характеризуется наличием дополнительных действий над материальными объектами:
- для каждого интервала экстраполяции в соответствии с прогнозируемой оценкой частоты радиосигнала осуществляется частотная модуляция импульсного сигнала, управляющего режимом дискретизации наблюдаемого процесса.
Теоретическое обоснование способа группирования наблюдений при фильтрации частотно-модулированных сигналов [3].
Под группированием наблюдений при обработке сигналов понимают объединение на интервале предсказания (экстраполяции) информационного (модулирующего) процесса нескольких отсчетов наблюдаемого сигнала. Такое объединение оказывается возможным в силу того, что частота принимаемого радиосигнала гораздо больше, чем полоса частот, занимаемая модулирующим сигналом. Иными словами, информационный процесс оказывается гораздо более «медленным», чем наблюдаемый радиосигнал, и для своего представления требует существенно меньшей частоты дискретизации.
Обозначим через h длительность интервала экстраполяции, а через Δ - шаг дискретизации входного процесса по времени, тогда группирование наблюдений будет характеризоваться коэффициентом группирования k=h/Δ.
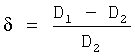
Обычно шаг Δ дискретизации входного процесса по времени при группировании наблюдений выбирается с таким расчетом, чтобы обеспечить 6-10 отсчетов на один период колебаний [4].
Дальнейшее наращивание количества отсчетов с учетом наличия флуктуационной ошибки практически не ведет к увеличению точности представления сигнала.
На Фигуре 1 представлены графики зависимости

где  - относительное значение среднеквадратического отклонения, обусловленного флуктуационной ошибкой;
- относительное значение среднеквадратического отклонения, обусловленного флуктуационной ошибкой;
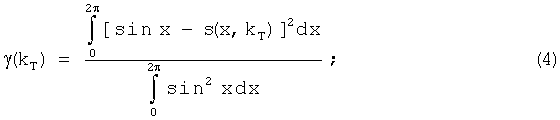
kT - число отсчетов на один период колебаний; s(x,kT) - линейная аппроксимация функции sinx с равномерным распределением отсчетов на [0,2π], для различных значений σ.
Из графиков следует, что при kT>8 точность представления сигнала меняется незначительно.
Для задач частотной модуляции период колебаний радиосигнала постоянно варьируется. Поэтому известные способы управления группированием наблюдений предполагают выбор шага и частоты дискретизации, исходя из значения несущей частоты радиосигнала ω0
 ,
,
где  .
.
Количество отсчетов, приходящихся на один период колебаний радиосигнала, при этом меняется во времени: kT(t), а коэффициент группирования наблюдений k, напротив, остается неизменным.
Для повышения точности обработки при заданных вычислительных затратах необходимо, чтобы количество отсчетов, приходящихся на один период колебаний с частотой ω(t) (частотой модулированного сигнала), оставалось неизменным kT=const. При этом величина шага дискретизации по времени Δ=Δ(t) при группировании наблюдений меняется таким образом, чтобы инвариантным оставался фазовый шаг дискретизации

При фильтрации сигналов с группированием наблюдений для предсказания информационного процесса λ(t) используется конечно-разностная схема с шагом h, величина которого определяется верхней границей частотного диапазона  . Поскольку при частотной модуляции, как правило,
. Поскольку при частотной модуляции, как правило,

где η - коэффициент девиации; λmах - максимальное значение модулирующего сигнала, то

Таким образом, внутри интервалов экстраполяции длительностью h осуществляется группирование наблюдений, дискретизация которых проводится с шагом Δ(t). При этом коэффициент группирования

где [·] - означает целую часть числа, меняется во времени.
Учитывая, что для i-го интервала экстраполяции может быть предсказана оценка частоты ω(t)=ω0+λ(t), которая приближенно полагается неизменной для этого интервала  , получаем
, получаем


где ki и Δi соответственно коэффициент группирования наблюдений,
и шаг дискретизации для i-го интервала экстраполяции;  - предсказанная на
- предсказанная на
i-м интервале экстраполяции оценка модулирующего сигнала.
Отметим, что для известных способов управления группированием наблюдений коэффициент группирования наблюдений k=const.
Структурная схема устройства, реализующего способ группирования наблюдений при фильтрации частотно-модулированных сигналов, представлена на Фигуре 2. На ней использованы следующие обозначения:
1 - первый ключ с информационным 11 и управляющим 12 входами;
2 - перемножитель со входами 21 и 22;
3 - накапливающий сумматор с информационным 31 и управляющим 32 входами;
4 - третий ключ с информационным 41 и управляющим 42 входами;
5 - блок оценивания с информационными 51, 52 входами;
6 - генератор непрерывной оценки;
7 - второй ключ с информационным 71 и управляющим 72 входами;
8 - первая линия задержки;
9 - вторая линия задержки на время h;
10 - генератор опорного сигнала;
11 - второй генератор импульсов с периодом следования импульсов h;
12 - частотный модулятор с информационным 121 и управляющим 122 входами;
13 - экстраполятор;
14 - первый генератор импульсов.
Устройство, представленное на Фигуре 2, работает следующим образом.
Входное наблюдение ξ(t) поступает на информационный вход 11 ключа 1. Отсчеты входного наблюдения с его выхода поступают на вход 21 перемножителя 2, на вход 22 которого поступают отсчеты производной опорного сигнала с выхода ключа 2. Результаты перемножения последовательно подаются на информационный вход 31 накапливающего сумматора 3, в котором осуществляется формирование суммы из ki элементов.
Результаты суммирования с выхода блока 3 поступают на вход 41 ключа 4, и далее на вход 51 блока оценивания 5, где осуществляется их взвешенное суммирование с предсказанной оценкой модулирующего сигнала, подаваемого на вход 52 с выхода экстраполятора 13.
Кроме того, в течение интервала экстраполяции предсказанная оценка с выхода блока 13 поступают на вход 122 модулятора 12 и на вход генератора опорного сигнала 10.
С выхода блока 10 опорный сигнал поступает на вход ключа 7 и далее с частотой, зависящей от предсказанной оценки модулирующего сигнала, на вход блока 2.
Управление частотой дискретизации входного и опорного сигналов осуществляется за счет частотной модуляции импульсов, поступающих с генератора 14 на вход 121 модулятора 12. Частотно-модулированные импульсы с выхода модулятора 12 подаются на управляющие входы 11 и 72 соответственно ключей 1 и 7.
Модулятор 12 формирует на своем выходе импульсный сигнал частотой  , где ƒ0 - частота радиосигнала; F0=kTƒ0 - частота импульсной последовательности, формируемой генератором 14.
, где ƒ0 - частота радиосигнала; F0=kTƒ0 - частота импульсной последовательности, формируемой генератором 14.
Генератор 11, подавая импульсы на вход 42 ключа 4, обеспечивает выдачу на блок 5 результатов суммирования с блока 3 с частотой 1/h. Эти же импульсы, проходя через линию задержки 8 и поступая на вход 32 сумматора 3, сбрасывают его в нулевое состояние. Время задержки h8, обеспечиваемое линией 8, должно с одной стороны удовлетворять условию h8<<h, а с другой - обеспечивать возможность передачи результатов суммирования на вход блока 5 в конце каждого интервала экстраполяции.
Выходной сигнал блока оценивания 5, поступая через линию задержки 9 на вход блока 13, обеспечивает предсказание на h оценки модулирующего сигнала. Кроме того, по выходному сигналу блока оценивания 5 в блоке 6 проводится восстановление непрерывного сигнала оценки.
Результаты вычислительного эксперимента [3]
Модель модулирующего сигнала:


где первая компонента λ1 имеет смысл речевого сообщения [4];
α=1300; β=35000; nλ - формирующий шум, у которого М[nλ(t)]=0;
M[nλ(t)nλ(t-τ)]=Nλδ(τ); Nλ =6·10-5;
nψ - формирующий шум, определяющий нестабильность фазы радиосигнала;
M[nψ(t)]=0; М[ψ(t)nψ(t-τ)]=Hψδ(τ); Nψ=3·10-2; γ=60;
η=V·2π·105;
η - коэффициент девиации (значения V в процессе численного эксперимента будут полагаться равными 0.5, 1, 1.5).
Здесь и далее параметры приведены в безразмерных величинах. Частотный диапазон λ1(t) по уровню 0.5 составляет [200, 6000].
Модель радиосигнала:

где n(t) - шум наблюдения, у которого
М[n(М)]=0, M[n(t)n(t-τ)]=N0δ(τ);
a=1, ω0=2π·10-6, N0=10-8.
Модель дискретного фильтра частотно-модулированного сигнала, построенного на базе предлагаемого способа.
Предсказание модулирующего сигнала на i-м интервале экстраполяции [ti-1, ti-1+h]:

где  ,
,  ,
,  - предсказываемые оценки.
- предсказываемые оценки.
Определение параметров управления режимом группирования наблюдений:

 ,
,

где  - предсказываемая частота радиосигнала.
- предсказываемая частота радиосигнала.
Формирование суммы из ki произведений отсчетов входного наблюдения и производной опорного радиосигнала внутри i-го интервала экстраполяции:

Формирование апостериорной оценки модулирующего сигнала путем взвешенного суммирования предсказанной оценки и суммы ri:

где 
K1, K2, K3 - весовые коэффициенты, определенные из решения уравнения Риккати; в рассматриваемых условиях К1=0.03, К2=0.037, К3=0.037.
Вычислительный эксперимент проводился в среде MathCAD.
Моделирование (11), (12) осуществлялось по схеме Эйлера с шагом 2·10-8. Для задания шумовых процессов использовались датчики нормально распределенных случайных чисел. Полагалось, что
t∈[0,4·10-3]; h=2·10-7; kT=10, 11, …, 40; V=0.5, 1, 15.
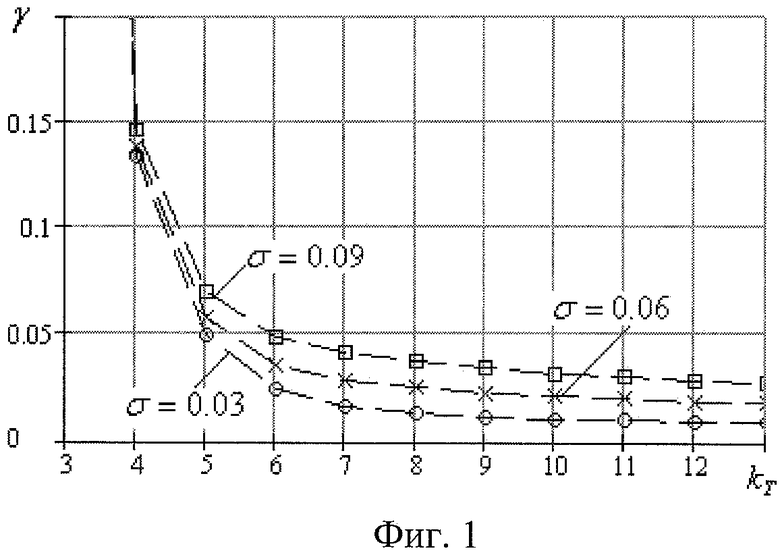
Вид фрагмента зависимости компоненты λ1 модулирующего сигнала и ее оценки  от времени при kT=10, V=1 представлен на Фигуре 3.
от времени при kT=10, V=1 представлен на Фигуре 3.
По результатам моделирования оценивалось усредненное значение шага дискретизации

где М=2·105.
Полученное значение использовалось при фильтрации тех же самых реализаций модулирующего сигнала (11), (12), но с использованием фильтра, построенного на основе известного способа управления группированием наблюдений, для которого в отличие от (15), (16)


Условие (20) соответствует условию равенства объема вычислительных затрат при реализации обеих процедур фильтрации.
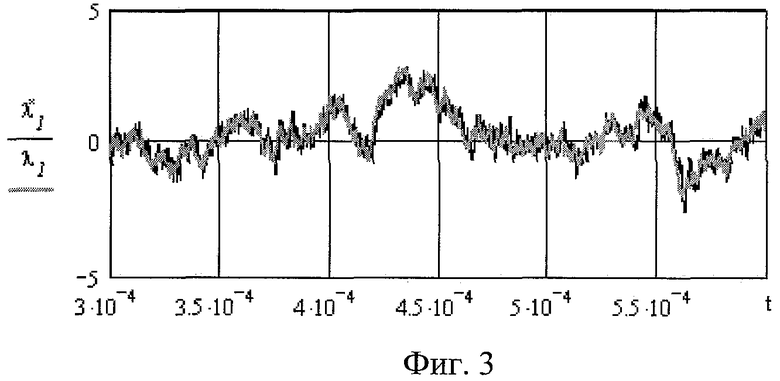
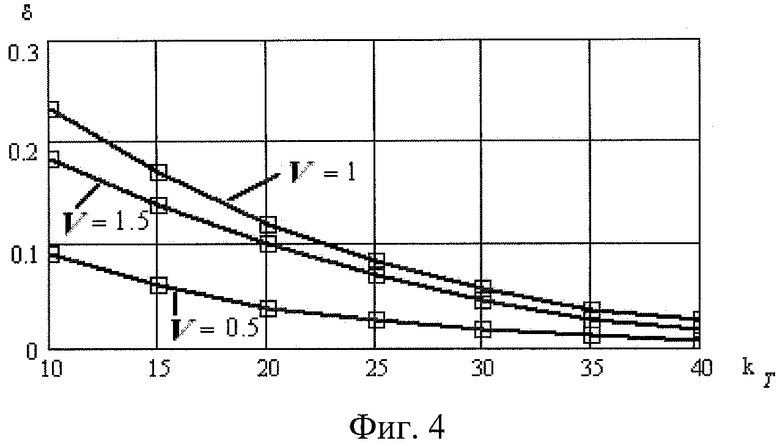
Для обоих случаев рассчитывалась выборочная дисперсия оценок

где D1 - соответствует фильтрации на основе предлагаемого способа управления группированием наблюдений;
D2 - соответствует фильтрации на основе известного способа.
Графики зависимости
для различных kT и V представлены на Фигуре 4.
Выигрыш в точности обработки имеет место для всего диапазона вариаций kT и V.
Вывод: фильтр частотно-модулированных сигналов, построенный на основе предлагаемого способа управления группированием наблюдений при сопоставимых вычислительных затратах, обеспечивает выигрыш в точности обработки (в условиях вычислительного эксперимента до 24%) по сравнению с аналогичным фильтром, использующим известный способ управления группированием наблюдений.
Источники информации
1. Харисов В.Н., Эфендиев Р.Н. Алгоритмы нелинейной фильтрации с группированием наблюдений. - Изд. вузов. Радиоэлектроника, 1989, т.32, №8 с.29-33.
2. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. М.: Радио и связь. 1991.
3. Хуторцев В.В., Гасанов А.И. Фазовая стабилизация режима дискретизации наблюдений в задаче цифровой фильтрации частотно-модулированных сигналов. - Радиотехника, №6, 2010.
4. Тихонов В.И., Кульман Н.К. Нелинейная фильтрация и квазикогерентный прием сигналов. М.: Сов. радио, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ИМПУЛЬСНО-КОДОВОЙ МОДУЛЯЦИИ - ДЕМОДУЛЯЦИИ СИГНАЛОВ | 2011 |
|
RU2446558C1 |
| Способ однопозиционной радиолокации подвижных источников радиосигнала на дорожной сети | 2017 |
|
RU2666553C1 |
| Латерационный способ однопозиционной радиолокации подвижных источников радиосигнала на дорожной сети | 2019 |
|
RU2703258C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ МОДУЛЯЦИИ | 2020 |
|
RU2760744C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МНОГОКАНАЛЬНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМОЙ | 2009 |
|
RU2395831C1 |
| СПОСОБ РАДИОЛОКАЦИИ ОБЪЕКТОВ НА ДОРОЖНОЙ СЕТИ | 2014 |
|
RU2545526C1 |
| СПОСОБ ОДНОПОЗИЦИОННОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ НА ДОРОЖНОЙ СЕТИ | 2013 |
|
RU2524482C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АППАРАТНОЙ ЗАДЕРЖКИ ВЫХОДНОГО СИГНАЛА ПЕРЕДАТЧИКА | 2015 |
|
RU2581767C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
| Способ регистрации сейсмической информации | 1989 |
|
SU1716459A1 |
Изобретение относится к радиотехнике и может быть использовано для фильтрации информационных процессов, передаваемых с помощью частотно-модулированных сигналов. Технический результат заключается в повышении точности обработки за счет адаптивного группирования наблюдений в процессе фильтрации частотно-модулированных сигналов. Сущность изобретения заключается в предсказании оценки модулирующего сигнала на i-м (i=1, 2, …) интервале экстраполяции длительностью h, определении на этом интервале зависящей от предсказанной оценки производной опорного радиосигнала, синхронной дискретизации по времени этой производной и входного сигнала с частотой F>1/h, определении произведений их отсчетов, формировании на i-м интервале экстраполяции сигнала, пропорционального сумме этих произведений, уточнении с ее помощью предсказанной оценки модулирующего сигнала, модулировании по частоте с помощью предсказанной оценки модулирующего сигнала импульсного сигнала, управляющего дискретизацией входного сигнала и производной опорного радиосигнала. 4 ил.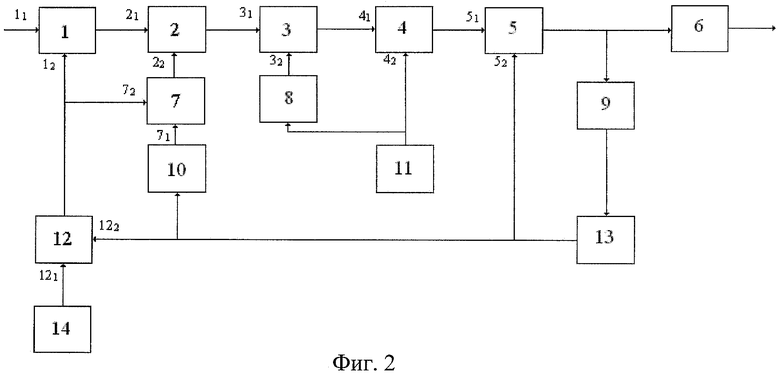
Способ управления группированием наблюдений при фильтрации частотно-модулированных радиосигналов, заключающийся в предсказании оценки модулирующего сигнала на i-м (i=1, 2, …) интервале экстраполяции длительностью h, определении на этом интервале зависящей от предсказанной оценки производной опорного радиосигнала, синхронной дискретизации по времени этой производной и входного сигнала с частотой F>1/h, определении произведений их отсчетов, формировании на i-м интервале экстраполяции сигнала, пропорционального сумме этих произведений, уточнении с его помощью предсказанной оценки модулирующего сигнала, отличающийся тем, что предсказанная на i-м интервале экстраполяции оценка модулирующего сигнала модулирует по частоте импульсный сигнал, управляющий дискретизацией входного сигнала и производной опорного радиосигнала.
| ХУТОРЦЕВ В.В., ГАСАНОВ А.И | |||
| Фазовая стабилизация режима дискретизации наблюдений в задаче цифровой фильтрации частотно-модулированных сигналов | |||
| - М.: Радиотехника, июнь 2010, №6, с.10-14 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ СПЕКТРАЛЬНО-ВРЕМЕННОГО АНАЛИЗА НЕСТАЦИОНАРНЫХ СИГНАЛОВ | 2008 |
|
RU2365981C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ СЛОЖНЫХ ШИРОКОПОЛОСНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ С ФИЛЬТРАЦИЕЙ В МАСШТАБНО-ВРЕМЕННОЙ ОБЛАСТИ | 2004 |
|
RU2282209C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 6662000 B1, 09.12.2003. | |||

