Изобретение относится к сельскохозяйственному и подъемно-траспортному машиностроению, используемым для привода сельхозорудий и транспортирования лесоматериалов.
Известны различные мотоблоки, которые вспашку, нарезание борозд и окучивание производят с помощью фрез. Однако глубокое рыхление и выкапывание картофеля они из-за малого сцепного веса делать не могут. При неглубокой вспашке фрезой под зиму производится мелкое измельчение почвы с большими энергетическими затратами, в чем нет необходимости. Под зиму достаточно на глубине 25-30 см произвести вспашку плугом с отвалом или рыхление культиваторной лапой с образованием крупных комков и даже глыб почвы. В течение зимы под действием мороза крупные комки распадаются на мелкую структуру.
Известно также, что получить достаточное тяговое усилие для вспашки плугом при малом весе агрегата можно только с помощью канатной тяги.
Известно устройство с канатной тягой для обработки почвы /а.с. СССР №1793826 A3, A01B 3/68, B66O 1/48/, содержащее платформу с якорным элементом, на которой смонтированы двигатель, редуктор, барабан с канатом, система включения и выключения и присоединенное к концу каната ручное почвообрабатывающее орудие, которое подтягивается в исходное положение и автоматически включает в нужные моменты тяговое устройство.
Главным недостатком этого устройства является трудоемкая работа при возвращении орудия в исходное положение.
Более совершенным можно считать агрегат для канатной тяги /а.с. СССР №697068, A01B 3/68, 1977 г./ преимущественно для возделывания виноградников на горных склонах, включающий моторную тележку с лебедкой, соединенной тросом с неподвижным якорем.
В этом устройстве сельхозорудия закреплены на тележке, а в конец участка оттягивается только конец троса с якорем. В этом случае облегчается подготовка к очередному проходу агрегата. Но при одном операторе работа малопроизводительна, надо оттянуть конец троса в конец участка и закрепить его якорем, а потом возвращаться к агрегату, на что уходит много времени.
Целью данного изобретения является изготовление такого привода каната без опор, который позволит при своем малом весе и малых габаритах легко соединяться с мотоблоком или моторной тележкой, на которых закреплено сельхозорудие, и создавать достаточную силу тяги, обеспечивая легкое управление.
Поставленная цель достигается тем, что два многоручьевых шкива соединены зубчатым зацеплением, снабжены опорными кольцами и прижимным роликом, а для реверсивного движения каната ведущий вал может попеременно присоединяться к приводу то одним, то другим концом.
Сущность изобретения поясняется прилагаемыми описанию чертежами.
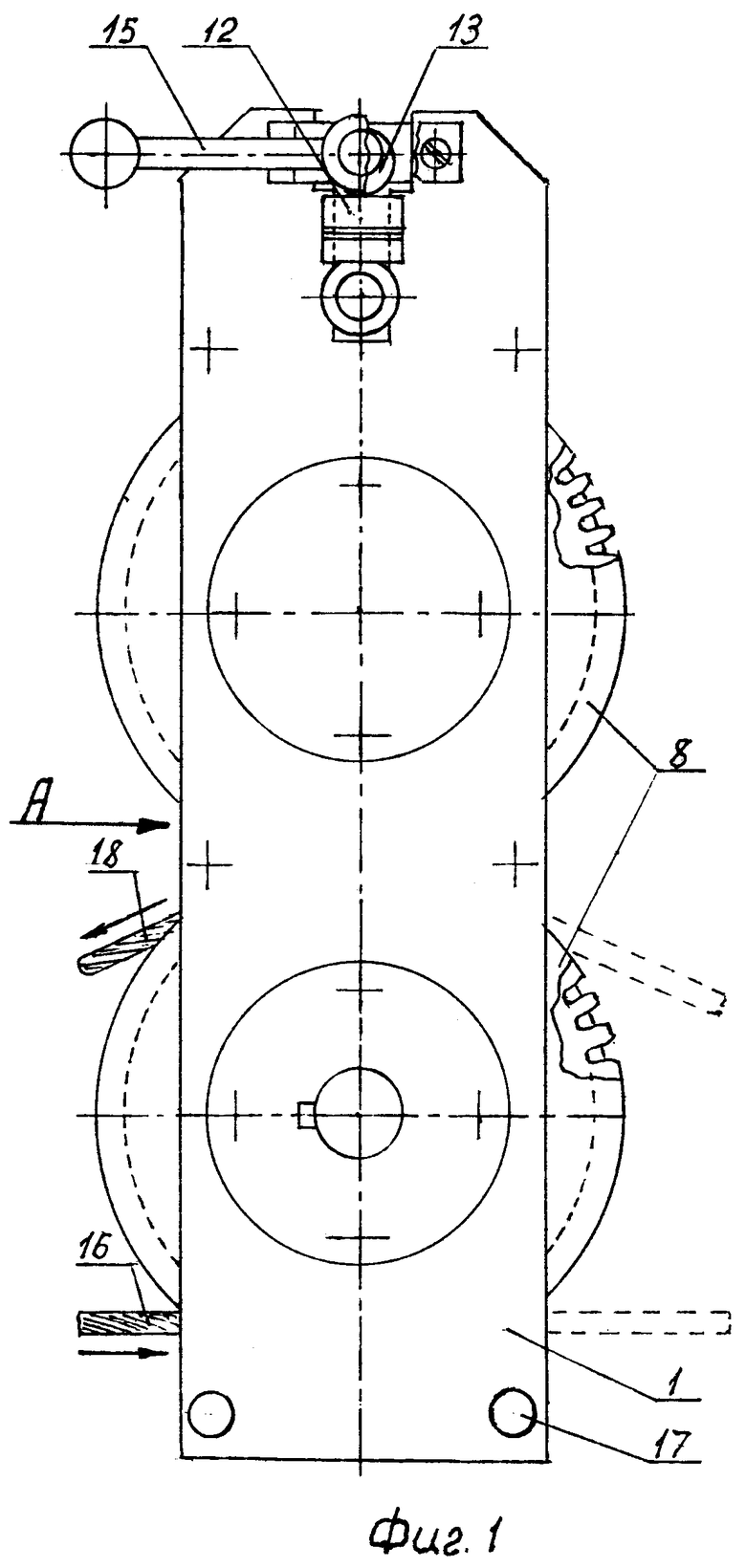
Фиг.1 - привод каната без опор. Фиг.2 - По А.
Привод каната состоит из корпуса 1, в котором установлены ведущий 2 и ведомый 3 многоручьевые шкивы. Ведущий шкив 2, соединенный с валом 4, концы которого снабжены шпонками 5, и ведомый шкив 3 с осью 6 вращаются в подшипниках 7. Шкивы соединены шестернями 8. Вследствие того, что многоручьевые шкивы между собой стягиваются множеством натянутых ветвей каната, то в целях разгрузки подшипников 7 по краям шкивов установлены опорные кольца 9, которые полностью воспринимают всю суммарную силу стягивания шкивов. Прижимной ролик 10, расположенный в подвижных подшипниках 11, прижимается к ведомому шкиву 3 через проставки 12 эксцентриками 13, закрепленными на валу 14 с рычагом 15, только по крайним ручьям ведомого шкива 3, обеспечивая некоторое натяжение на той или другой нисходящей ветви каната в случае реверса.
Заправленный канатом привод вращается через выходящие концы приводного вала 4 в одном и другом направлениях, создает то на одном, то на другом конце каната тяговое усилие. Достигается оно за счет силы трения каната о ручьи шкивов при наличии некоторого тягового усилия на последней сходящей с блока на блок ветви каната, что создается силой трения поджатого роликом 10 каната о шкив 3 и сопротивления на входной ветви каната 16. Регулировка натяжения производится подбором проставок 12 и положением рычага 15. Реверс производится путем присоединения тем или другим концом приводного вала 4 к приводу мотоблока 3.
Работает привод каната на мотоблоке следующим образом.
Сначала с края обрабатываемого участка укладывают канат, заправленный в привод, а концы крепят к самозаглубляющимся якорям. Затем подгоняют мотоблок с сельхозорудием и устанавливают на него привод каната, вводя нужный конец приводного вала 4 со шпонкой 5 во внутреннее отверстие звездочки со шпанпазом, которая укреплена на мотоблоке и получает вращение от его выходного вала. Закрепляют привод каната шкворнем через отверстия 17 и соответствующее - в мотоблоке. Прижав ролик 10 поворотом рычага 15 к шкиву 3 и заведя через щель в отводную трубку сходящий канат 18, включают движение агрегата.
В конце гона агрегат останавливают. Затем, отжав ролик 10, чем облегчают необходимую небольшую протяжку каната, снимают привод каната и, поставив его в сторону необработанного участка, разворачивают мотоблок для обратного движения. Переставив якорь на величину двойного прохода, присоединяют привод каната другим концом приводного вала 4 к мотоблоку, прижимают ролик 10 рычагом 15 и заправляют в отводную трубку выходящую ветвь каната 18. Агрегат готов для обратного движения.
Так как привод каната присоединили к мотоблоку другим концом приводного вала 4, то он получает вращение в обратном направлении. При этом нисходящая ветвь каната становится тяговой, а тяговая - нисходящей. Прижатие ролика 10 регулируется так, чтобы привод каната работал без пробуксовки.
Проведенные замеры динамометром показали, что при мощности двигателя в 4 л.с. и передаточном отношении 1:110, при диаметре шкивов 110 мм и каната 4,5 мм тяговое усилие достигало 600 кг.с.
Более чем достаточная сила тяги позволяет при безотвальной вспашке производить рыхление почвы глубиной до 30 см.
Небольшой вес самодельного мотоблока /около 50 кг.с./, который два года работает с приводом каната без опор весом 13 кг.с., позволяет без затруднений производить разворот агрегата, делать отсоединение и присоединение привода каната. Для легкого управления агрегатом одна рука удерживает агрегат за рукоять, а в другой - рычаг управления.
Перестановка якорей также незатруднительна. Наживленный якорь заглубляется сам и при этом несколько сдвигает почву вперед, создавая условие свободного его извлечения.
Мною разработаны чертежи для изготовления приставки привода каната без опор к серийному наиболее легкому по весу мотоблоку "Крот", что и будет сделано в ближайшее время.
Применение предлагаемого привода каната без опор на существующих мотоблоках позволит значительно расширить их возможности: глубоко пахать, выкапывать картофель, применять другие прицепные широкозахватные орудия, при предпосадочной культивации и бороновании. Такие мотоблоки с канатной тягой найдут широкое применение в горном земледелии.
Предлагаемая конструкция привода каната без опор может быть использована для изготовления конвейеров на лесоразработках и лыжных спортивных трассах, для чего достаточно разработать специальные чекеры, которые позволят присоединяться к канату и отсоединяться в назначенном месте.
Мотоблок с канатным приводом без опор можно использовать при создании временных небольших по длине конвейеров в зоне отдыха для подъема лыжников и саночников в гору.
При наличии близости электросетей задача привода конвейера значительно упрощается.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНАТНЫЙ КОНВЕЙЕР СПАСЕНИЯ ЛЮДЕЙ ПРИ ПОЖАРЕ | 2010 |
|
RU2435620C1 |
| Агрегат с канатной тягой | 1989 |
|
SU1708169A1 |
| МОТОЛЕБЕДКА | 2011 |
|
RU2489345C1 |
| ОПОРА РАХИНСКИХ ДЛЯ ПОЛЕВОГО КАБЕЛЯ | 1993 |
|
RU2064747C1 |
| АГРЕГАТ С КАНАТНОЙ ТЯГОЙ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ | 1993 |
|
RU2090990C1 |
| Сочлененное транспортное средство | 1986 |
|
SU1357299A1 |
| Агрегат для обработки почвы | 1979 |
|
SU1028257A1 |
| ОРУДИЕ ДЛЯ ОБРАБОТКИ ПОЛЕЙ И РИСОВЫХ ЧЕКОВ НА КАНАТНОЙ ТЯГЕ | 1994 |
|
RU2084094C1 |
| Комплексная грузо-пассажирская переправа через водоток с приводом от водяного колеса | 2019 |
|
RU2713312C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПЕРЕМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ ВАГОНОВ | 2022 |
|
RU2781318C1 |
Изобретение относится к сельскохозяйственному, подъемно-транспортному машиностроению и к канатным конвейерам. Привод каната в виде сблокированных двух многоручьевых шкивов состоит из корпуса, в котором установлены ведущий (2) и ведомый (3) многоручьевые шкивы. Ведущий шкив (2), соединенный с валом (4), концы которого снабжены шпонками (5), и ведомый шкив (3) с осью (6) вращаются в подшипниках (7). Шкивы соединены шестернями. По краям шкивов установлены опорные кольца (9), которые полностью воспринимают всю суммарную силу стягивания шкивов. Прижимной ролик (10), расположенный в подвижных подшипниках (11), прижимается к ведомому шкиву (3) через проставки (12) эксцентриками (13), закрепленными на валу (14) с рычагом, только по крайним ручьям ведомого шкива (3), обеспечивая некоторое натяжение на той или другой нисходящей ветви каната в случае реверса. Достигаются упрощение конструкции и легкость управления. 2 ил.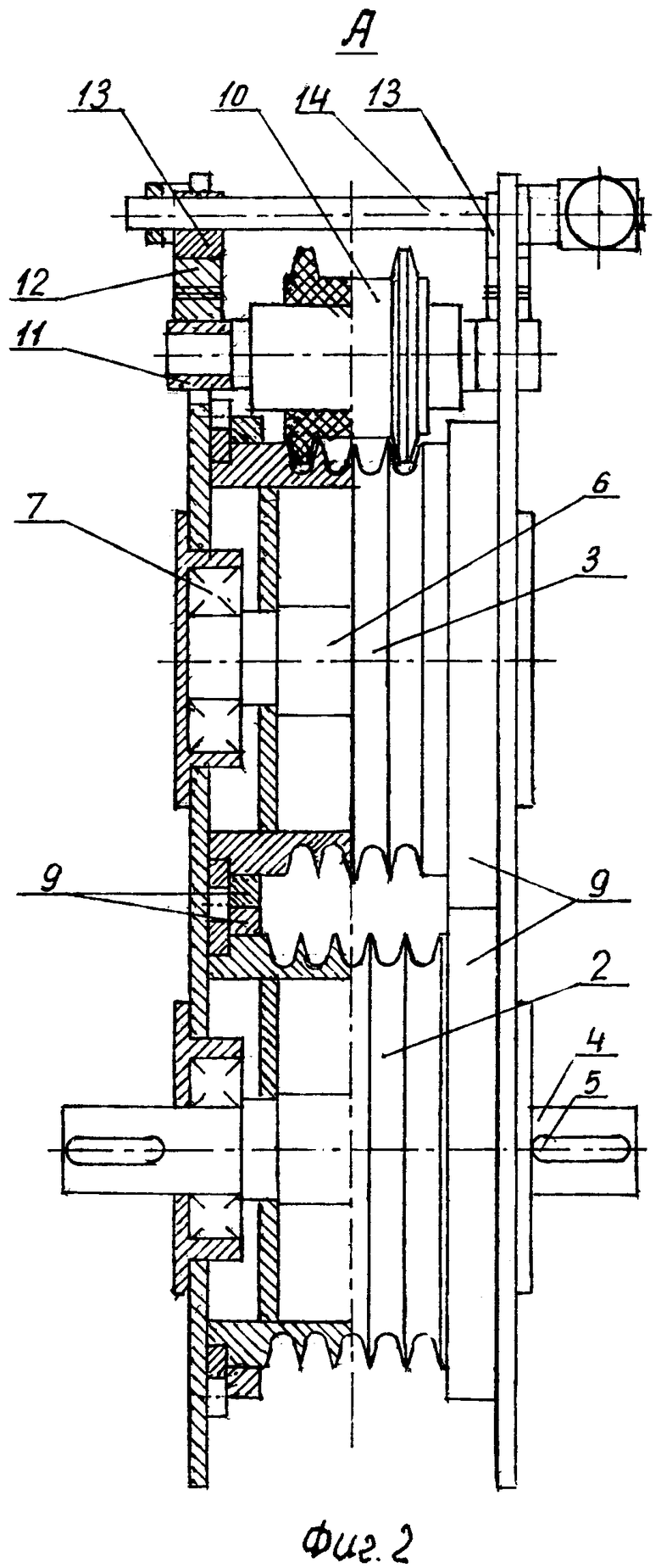
Привод каната в виде сблокированных двух многоручьевых шкивов, отличающийся тем, что два многоручьевых шкива соединены зубчатым зацеплением, снабжены опорными кольцами и прижимным роликом, а для реверсивного движения каната ведущий вал может присоединяться к приводу то одним, то другим своим концом.
| Агрегат для канатной тяги | 1977 |
|
SU697068A1 |
| Переносная лебедка с приводом | 1970 |
|
SU455912A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЧВЫ | 1993 |
|
RU2112331C1 |
| Способ сварки термопластичных полимерных материалов | 1987 |
|
SU1512803A1 |
| ЦИКЛОННЫЙ ПЫЛЕСБОРНИК ПЫЛЕСОСА | 2002 |
|
RU2226354C2 |

