Изобретение относится к стрелковому оружию и может быть использовано для прицельной стрельбы по движущимся мишеням. Попадание из стрелкового оружия с большой дистанции по быстро движущейся цели (например, движущейся мишени на соревнованиях) представляет собой сложную задачу. Зная дистанцию и скорость пули, «прикидывают» на глаз угол упреждения или, например, новую точку прицеливания на несколько корпусов вперед по движению объекта. Естественно, при этом точность стрельбы невысока из-за погрешности определения скорости мишени и расчетной погрешности.
Известен способ стрельбы по движущимся целям, включающий сопровождение цели линией прицеливания в течение заданного интервала времени, измерение и интегрирование угловой скорости линии прицеливания в течение того же интервала времени и отклонение направления стрельбы в сторону опережения линии прицеливания по окончании этого интервала на величину, пропорциональную результату интегрирования (см. патент Великобритании №1294291, F41G 5/08, 1972 г.). Устройство для осуществления известного способа содержит датчики азимутальной и вертикальной угловых скоростей, оптический прицел, положение которого изменяется сервомоторами, таймер, интеграторы и задатчик сигнала коррекции.
Недостатком данного решения, помимо сложности осуществления, является неудобство пользования: стрелку необходимо осуществлять сопровождение в течение заданного интервала, хотя готовность к выстрелу может наступить как до, так и после его окончания, а в момент окончания данного интервала стрелок может быть не готов. Кроме того, действиям стрелка мешает скачкообразное отклонение направления стрельбы в окуляре прицела.
Наиболее близким к предложенному является способ стрельбы и прицел для стрельбы по движущимся целям, включающий сопровождение цели линией прицеливания в начале и конце заданного интервала времени, вычисление угловой скорости линии прицеливания в течение того же интервала времени и отклонение направления стрельбы в сторону опережения от линии прицеливания по окончании этого интервала на величину, пропорциональную результату вычисления (см. патент Великобритании №2095799, F41G 5/08, 1982 г.). Устройство для осуществления известного способа содержит дальномер с тактовым генератором и вычислителем, датчик угла и оптический прицел, положение которого изменяется сервомотором. Выходы датчика угла и дальномера подключены ко входам вычислителя.
Однако известным способу и устройству присущи те же недостатки: их реализация приводит к усложнению процесса стрельбы, неоправданному усложнению прицела, они неудобны в применении к легкому стрелковому оружию, не допускают управления в процессе стрельбы и, особенно, прицеливания, а кроме того, небезопасны применительно к спортивной стрельбе по движущимся мишеням, поскольку не исключают ошибки стрелка.
Техническим результатом, ожидаемым от использования изобретения, является упрощение процесса стрельбы и прицела, повышение удобства пользования прицелом, что, в свою очередь, приведет к повышению точности и скорости стрельбы, а также исключение субъективных ошибок. Предлагаемое техническое решение призвано максимально упростить процесс стрельбы и, что немаловажно (особенно на соревнованиях), сократить время между началом прицеливания и выстрелом.
С другой стороны, из соображений безопасности, при большом упреждении (десятки метров) важно контролировать точку встречи мишени и пули на предмет наличия препятствий и возможных рикошетов (столбы, опоры), пробегающих животных и пр.
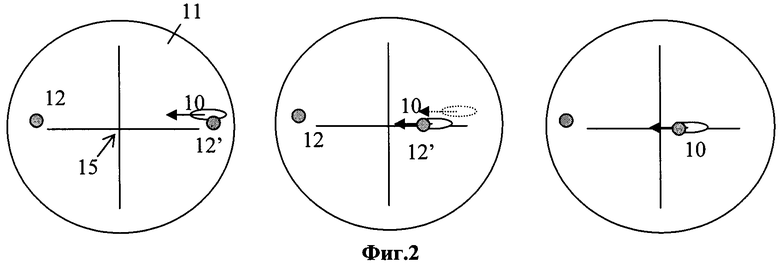
Указанный результат достигается тем, что в известном способе стрельбы по движущимся целям, включающем сопровождение цели, вычисление угловой скорости оружия и отклонение направления стрельбы на величину, пропорциональную результату вычисления, сопровождение движущейся цели производят меткой, в начале процесса сопровождения расположенной в поле зрения противоположно перекрестию прицела от направления сопровождения, что соответствует максимальному упреждению, в процессе сопровождения осуществляя отклонение направления стрельбы в сторону, противоположную опережению от линии прицеливания на величину, пропорциональную текущему результату вычисления, путем постепенного сближения указанной метки с перекрестием прицела.
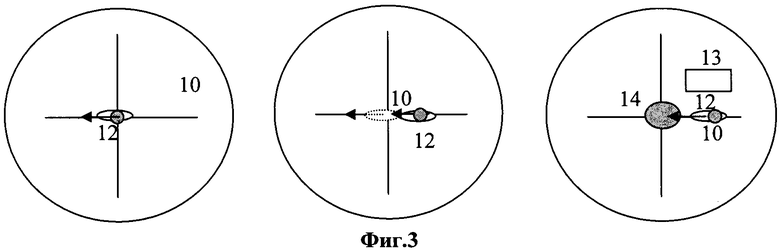
Указанный результат достигается также тем, что в известном способе стрельбы по движущимся целям, включающем сопровождение цели, вычисление угловой скорости оружия и отклонение направления стрельбы на величину, пропорциональную результату вычисления, сопровождение цели производят меткой, в начале процесса сопровождения расположенной в поле зрения в перекрестии прицела, в процессе сопровождения осуществляя отклонение направления стрельбы в сторону опережения от линии прицеливания на величину, пропорциональную текущему результату вычисления, путем постепенного удаления указанной метки от перекрестия прицела.
При этом в процессе вычисления угловой скорости оружия учитывают сближение метки и перекрестия прицела или удаление метки от перекрестия прицела.
Целесообразно также сопровождение цели осуществлять меткой, заранее выставленной по высоте на основе задания дистанции и известной баллистике патрона и/или оружия.
Кроме того, выстрел целесообразно производить после сближения метки и перекрестия прицела на заданную величину.
Возможно также завершение процесса сопровождения цели определять по кажущемуся снижению скорости движения метки на дисплее до заданной величины.
При этом начало режима сопровождения и/или переход на новую метку обозначают кодовым постукиванием пальца по ограничительной скобе спуска или по прикладу, а окончание режима сопровождения фиксируют по отдаче в момент выстрела.
И, наконец, процесс сопровождения цели целесообразно совместить с сопоставлением ее соседних изображений, а при появлении резких отличий, свидетельствующих о наличии в поле зрения резких изменений и/или характерных изображений, выстрел не производить.
Указанный результат достигается также тем, что в известном устройстве для стрельбы по движущимся целям, содержащем оптический прицел и последовательно соединенные датчик угловой скорости и вычислитель, оптический прицел выполнен с дисплеем меток, подключенным к выходу вычислителя, который выполнен с возможностью уточнения текущего положения метки.
Кроме того, известное устройство может быть снабжено последовательно соединенными акселерометром и дешифратором, выход которого соединен с соответствующим управляющим входом вычислителя.
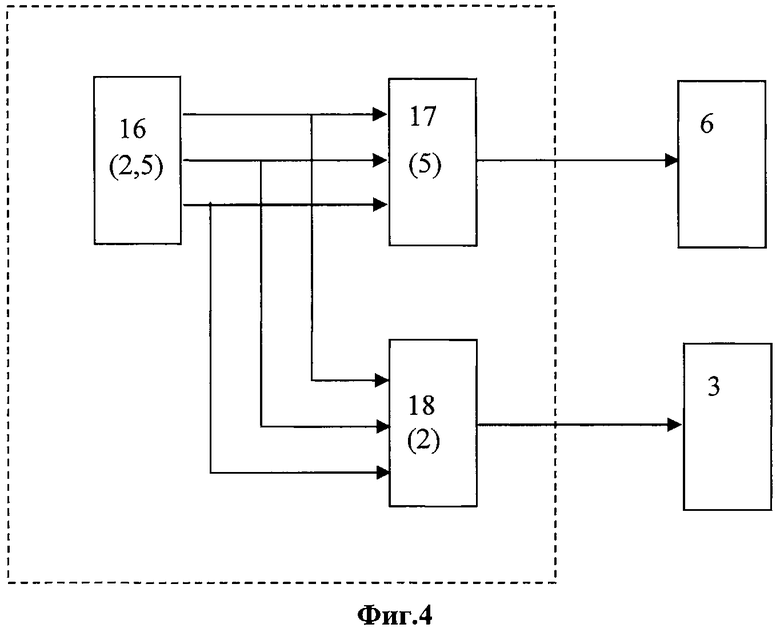
Кроме того, известное устройство может быть снабжено дешифратором, выход которого соединен с соответствующим управляющим входом вычислителя, а вход - со вторым выходом датчика угловой скорости, выполненным в виде трехосного акселерометра, выходы которого соединены со входами интегратора и элемента ИЛИ, выходы которых образуют первый и второй выходы датчика угловой скорости соответственно.
При этом известное устройство может быть снабжено также анализатором изображений, настроенным на фиксацию заданных форм и/или резких переходов, причем выход анализатора изображений соединен с информационным входом дисплея меток.
И, наконец, анализатор изображений может быть выполнен в виде последовательно соединенных фоточувствительной матрицы и процессора, выход которого соединен с информационным входом вычислителя, выполненного с дополнительным выходом, подключенным к информационному входу дисплея меток.
На фиг.1 изображена блок-схема устройства для осуществления способа, фиг.2, 3 иллюстрируют варианты способа стрельбы по движущимся мишеням, а фиг.4 - вариант выполнения датчика угловой скорости.
Устройство, показанное на фиг.1, содержит окуляр 1 оптического прицела, жестко соединенный со стволом стрелкового оружия и датчиком 2 угловой скорости последнего. Выход датчика 2 соединен с первым входом вычислителя 3, первый выход которого соединен с первым входом дисплея 4 меток.
Прицел может содержать также акселерометр 5, жестко закрепленный на ограничительной скобе, прикладе или ином конструктивном элементе стрелкового оружия, выход которого подключен к входу дешифратора 6, выход которого соединен с управляющим входом вычислителя 3.
На фиг.1 показана также фоточувствительная матрица 7, выход которой соединен со входом процессора 8 видеосигнала, выход которого соединен с информационным входом вычислителя 3, выполненного с дополнительным выходом, подключенным к информационному входу дисплея 4 меток. Устройство может также содержать дальномер 9, выполненный с возможностью задания на его входе некоторой уставки, определяющей баллистические параметры применяемого стрелкового оружия и пули, а также вычисления превышения на основе измеренной дальности и упомянутой уставки. Величина превышения подается с выхода дальномера 9 на четвертый вход вычислителя 3.
Движущаяся мишень обозначена на фиг.1 позицией 10, направления движения мишени 10 и направление сопровождения - стрелками. Позицией 11 на фиг.2, 3 обозначено поле зрения окуляра 1 (визир прицела), позицией 12 - метки, генерируемые дисплеем 4 (метка, противоположная метке 12 обозначена позицией 12'). Появление объекта 13 в поле зрения 11 отмечается меткой 14, также на дисплее 4. Перекрестие прицела 1 обозначено позицией 15.
Датчик 2 (фиг.4) может быть совмещен с акселерометром 5, как могут быть совмещены вычислитель 3 и процессор 8. Если в последнем случае такое совмещение реализуется программными средствами с использованием описанных алгоритмов, то совмещение датчика 2 с акселерометром 5 возможно выполнить аппаратными: выходы трехосного акселерометра 16 подключают к входам элемента 17 ИЛИ, выход которого соединен со входом дешифратора 6, и входами трехканального интегратора 18, выходной сигнал которого несет информацию о составляющих угловой скорости и подключен ко входу вычислителя 3.
Реализацию вариантов способа стрельбы по движущимся мишеням рассмотрим на примере работы устройства.
Прицел характеризуется тем, что информация от датчика 2 угловой скорости поступает в вычислитель 3, выходные данные которого могут отображаться в визире прицела в виде дополнительной информации, но, главное, используются для автоматического перемещения метки 12 при сопровождении движущейся мишени 10.
При прицеливании стрелок начинает сопровождать движущуюся мишень 10 (например, держа перекрестье прицела 15 или метку 12 на выбранной точке мишени 10). Вычислитель 3 измеряет скорость углового перемещения оружия (при этом он может обрабатывать эти данные, отфильтровывая от толчков и дрожания основную составляющую угловой скорости сопровождения) и по заранее известной (введенной) дистанции (может измеряться, например, лазерным дальномером 9 в начале прицеливания или в реальном времени в процессе сопровождения мишени), а также предварительно введенным параметрам патрона и оружия (скорость пули, возвышение траектории и т.п.) и параметрам окружающей среды (температура, давление, сила направления ветра и пр.) вычисляет необходимую поправку.
В поле зрения 11 окуляра 1 по краям поля справа и слева, соответственно по бокам от центрального перекрестия 15 размещаются две подвижные метки 12 и 12' (реализуется это в зависимости от конструкции прицела сканирующим лучом либо матрицей точечных излучателей, спроецированных в поле окуляра и т.п.), возвышение которых соответствует дистанции стрельбы, баллистике оружия и другим упоминавшимся поправкам (уставкам). При начале сопровождения движущейся мишени 10 стрелок использует противоположную от направления сопровождения по отношению к перекрестию 15 метку 12' (вариант 1, фиг.2) в поле 11 прицела 1, позиционируя ее на нужной точке мишени 10 (насколько разрешение оптики и размеры мишени 10 это допускают). То есть, если цель 10 движется справа налево и находится справа от перекрестия 15, сопровождение производится меткой 12', расположенной справа от перекрестия 15.
Далее, вычислитель 3, определив по устойчивому угловому перемещению оси оружия и прицела 1 направление перемещения и угловую скорость сопровождения, непрерывно и плавно корректирует положение этой метки 12 относительно центрального перекрестия 15 таким образом, что при непрерывном позиционировании метки 12 на движущейся мишени 10 перекрестье 15 показывает текущее положение точки встречи пули с мишенью 10. Следует отметить, что для большинства оптических прицелов величина углового упреждения размером в половину поля зрения в реальных условиях более чем достаточна. Так, для 6-кратного прицела с полем окуляра 45° на дистанции 300 метров (с учетом баллистики, например, пули калибра 7,62) это соответствует максимальной скорости мишени 200 км/ч, а на дистанции 500 метров - около 160 км/ч.
Сигнал от нажатия кнопки, удар в момент выстрела (измеряется встроенным акселерометром 5), либо резкое перемещение в новое положение (определяется датчиком 2 угловой скорости и/или акселерометром 5), либо прекращение углового движения могут быть сигналом для автоматического прекращения вычислителем 3 режима сопровождения.
При этом начало режима сопровождения и/или переход на новую метку обозначают каким-либо сигналом, принимаемым прицелом: нажатие кнопки, кодовое постукивание пальца по ограничительной скобе спуска или по прикладу, а окончание режима сопровождения фиксируют также по сигналу или по отдаче в момент выстрела.
Акселерометр 5 и дешифратор 6 последовательного кода предназначены также для «общения» с прицелом кодовым постукиванием по ограничительной скобе спуска (курка) или по прикладу. Это позволяет не менять положение рук на оружии и не пользоваться дополнительными средствами, отвлекающими внимание стрелка. Таким образом, например, может быть заранее назначен режим сопровождения и даже введена дистанция - выбором из меню экрана (пролистыванием по кругу из нескольких имеющихся вариантов) и т.п.
Вычислитель 3, в отличие от известного решения, производит более сложное вычисление, постоянно вычитая (учитывая) им же задаваемое движение метки, производя итерационные вычисления. Такой процесс воспринимается стрелком легче, он гораздо реалистичней, и позволяет не прерывать биологическую обратную связь человека. Тогда как любое перескакивание метки 12 обычно разрывает такую связь необратимо и, фактически, с этого момента стрелок начинает все сначала. В первом варианте способа вычислитель учитывает сближение метки 12 и перекрестия 15, во втором - их взаимное удаление.
Вычислитель 3 может сигнализировать на дисплее 4 о завершении процесса сопровождения и готовности к выстрелу. Кроме того, по замедлению метки 12 при ее «подползании» к перекрестию 15 можно судить о степени точности вычисленного упреждения - еще до появления каких-либо знаков, подтверждающих это (чему стрелок легко обучается). И выстрел может быть произведен раньше, если, например, в связи с размерами мишени 10 или другими причинами погрешность стрелка устраивает.
Второй вариант способа стрельбы по движущимся целям (фиг.3) предполагает, что метка 12 отделяется от перекрестия 15. В остальном процесс стрельбы по движущимся мишеням осуществляется также, только метка 12 не приближается к перекрестию 15, а удаляется от него.
Необходимо пояснить, что операция сопровождения меткой 12, положение которой непрерывно корректируется вычислителем 3 на дисплее 4, производится в предлагаемом способе так же просто, как в любом известном, поскольку на фоне сопровождения цели, производимого стрелком, последний практически не замечает движения метки 12 к перекрестию 15 для первого варианта и от перекрестия 15 для второго.
Дальномер 9 предназначен для формирования сигнала, в зависимости от величины которого вычислитель 3 формирует возвышение метки 12 из условия попадания на данной дистанции. Величина дистанции может как выставляться вручную, так и определяться дальномером 9.
Стрелок, осуществляя сопровождение цели 10, в поле зрения 11 окуляра 1 видит постепенное сближение метки 12 и перекрестия 15 и замедление этого движения (вариант 1 способа) или только замедление (вариант 2). Это позволяет оценить завершение процесса прицеливания «на глаз» и произвести выстрел по достижению заданного расстояния между меткой 12 и перекрестием 15 или по достижению заданного замедления движения метки 2 в поле зрения 11.
Управление прицелом осуществляется любым известным образом, в том числе нажатием кнопки, голосовой командой или постукиванием пальца по элементам оружия, воспринимаемым акселерометром 5 в виде последовательного кода, преобразуемого в сигнал управления вычислителем 3 дешифратором 6.
Процессор 8 выполняет сравнение соседних изображений с достаточно высокой частотой, так чтобы за время сопровождения цели 10 имело место не менее десяти «кадров», сравнение которых позволит зафиксировать появление в окуляре 1 препятствия и с помощью вычислителя 3 и метки 14 на дисплее 4 предупредить стрелка. Процессор 8 выполняет также поиск и распознавание в каждом новом изображении заданных характерных объектов - людей, автомобилей и т.п., что позволяет также подать на дисплей сигнал о прекращении стрельбы.
Планируемая точка встречи пули с мишенью движется на местности впереди мишени, проецируясь на случайные неподвижные посторонние предметы (люди, коровы, велосипеды). В безопасном режиме на время прохождения этой точки по ним блокируется спусковой механизм или в поле зрения 11 прицела появляется метка 14. В качестве запрещающих или разрешающих сигналов (готовность к выстрелу, например) может использоваться изменение цвета метки, например, с красного или желтого на зеленый.
Для повышения безопасности возможно использовать электромагнитный или иной автоматический блокиратор спускового механизма в случае появления запрещенного предмета на предполагаемой линии огня.
Таким образом, предлагаемый способ обеспечивает упрощение процесса стрельбы по движущимся мишеням и прицела, повышение удобства пользования прицелом, повышение точности и скорости стрельбы, а также исключение субъективных ошибок. Предлагаемое техническое решение упрощает процесс стрельбы и сокращает время между началом прицеливания и выстрелом, делает стрельбу безопасной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного управления стрелковым комплексом | 2024 |
|
RU2832853C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2218544C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2217684C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ ОРУЖИЯ НА ПОДВИЖНУЮ ЦЕЛЬ | 2014 |
|
RU2555643C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ С АВТОМАТОМ КОРРЕКТИРОВАНИЯ СТРЕЛЬБЫ | 2008 |
|
RU2363910C1 |
| Оптическое устройство, использующее баллистическое масштабирование, и способ визирования цели (варианты) | 2015 |
|
RU2674720C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| СПОСОБ СТРЕЛЬБЫ И КОМПЛЕКС УПРАВЛЕНИЯ ОГНЕМ ТАНКОВОГО ОРУДИЯ | 2006 |
|
RU2349863C2 |
| ПРИЦЕЛ-ДАЛЬНОМЕР ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ И ГРАНАТОМЕТОВ | 2013 |
|
RU2536186C1 |
| Тренажер для стрельбы по движущимся мишеням | 2021 |
|
RU2768990C1 |
Изобретение относится к способу стрельбы по движущимся целям и прицелу для стрельбы по движущимся целям. Способ включает сопровождение цели, вычисление угловой скорости оружия и отклонение направления стрельбы в сторону опережения линии прицеливания на величину, пропорциональную результату вычисления. Сопровождение цели производят меткой, первоначально расположенной в поле зрения противоположно перекрестию прицела от направления сопровождения. Одновременно осуществляют отклонение направления стрельбы в сторону опережения от линии прицеливания на величину, пропорциональную текущему результату вычисления путем постепенного сближения указанной метки с перекрестием прицела. Прицел содержит оптический прицел и последовательно соединенные датчик угловой скорости и вычислитель. Оптический прицел выполнен с дисплеем меток, подключенным к выходу вычислителя и снабжен последовательно соединенными акселерометром и дешифратором, выход которого соединен с соответствующим управляющим входом вычислителя, который выполнен с возможностью уточнения текущего положения метки. Технический результат - упрощение процесса стрельбы, сокращение времени между прицеливанием и выстрелом, повышение точности стрельбы. 3 н. и 6 з.п. ф-лы, 4 ил.
1. Способ стрельбы по движущимся целям, включающий сопровождение цели, вычисление угловой скорости оружия и отклонение направления стрельбы на величину, пропорциональную результату вычисления, отличающийся тем, что сопровождение движущейся цели производят меткой, в начале процесса сопровождения расположенной в поле зрения противоположно перекрестию прицела от направления сопровождения, что соответствует максимальному упреждению, в процессе сопровождения осуществляя отклонение направления стрельбы в сторону, противоположную опережению от линии прицеливания на величину, пропорциональную текущему результату вычисления, путем постепенного сближения указанной метки с перекрестием прицела.
2. Способ по п.1, отличающийся тем, что выстрел производят после сближения метки и перекрестия прицела на заданную величину.
3. Способ по п.1, отличающийся тем, что завершение процесса сопровождения цели определяют по кажущемуся снижению скорости движения метки на дисплее до заданной величины.
4. Способ по п.1, отличающийся тем, что начало режима сопровождения, переход на новую метку обозначают кодовым постукиванием пальца по ограничительной скобе спуска или по прикладу, а окончание режима сопровождения фиксируют по отдаче в момент выстрела.
5. Способ по п.1, отличающийся тем, что процесс сопровождения цели совмещают с сопоставлением и анализом ее соседних изображений, а при появлении резких отличий, свидетельствующих о наличии в поле зрения резких изменений и/или характерных изображений, выстрел не производят.
6. Способ стрельбы по движущимся целям, включающий сопровождение цели, вычисление угловой скорости оружия и отклонение направления стрельбы на величину, пропорциональную результату вычисления, отличающийся тем, что сопровождение цели производят меткой, в начале процесса сопровождения расположенной в поле зрения в перекрестии прицела, в процессе сопровождения осуществляя отклонение направления стрельбы в сторону опережения от линии прицеливания на величину, пропорциональную текущему результату вычисления, путем постепенного удаления указанной метки от перекрестия прицела, при этом завершение процесса сопровождения цели определяют по кажущемуся снижению скорости движения метки на дисплее до заданной величины, начало режима сопровождения и/или переход на новую метку обозначают кодовым постукиванием пальца по ограничительной скобе спуска или по прикладу, а окончание режима сопровождения фиксируют по отдаче в момент выстрела.
7. Прицел для стрельбы по движущимся целям, содержащий оптический прицел и последовательно соединенные датчик угловой скорости и вычислитель, отличающийся тем, что оптический прицел выполнен с дисплеем меток, подключенным к выходу вычислителя и снабжен последовательно соединенными акселерометром и дешифратором, выход которого соединен с соответствующим управляющим входом вычислителя, который выполнен с возможностью уточнения текущего положения метки.
8. Прицел по п.7, отличающийся тем, что он снабжен анализатором изображений, настроенным на фиксацию заданных форм и/или резких переходов, причем выход анализатора изображений соединен с информационным входом дисплея меток.
9. Прицел по п.8, отличающийся тем, что анализатор изображений выполнен в виде последовательно соединенных фоточувствительной матрицы и процессора, выход которого соединен с информационным входом вычислителя, выполненного с дополнительным выходом, подключенным к информационному входу дисплея меток.
| КОЛЛИМАТОРНЫЙ ПРИЦЕЛ | 2004 |
|
RU2270972C1 |
| ПСИХРОМЕТРИЧЕСКИЙ ИЗМЕРИТЕЛЬ ВЛАЖНОСТИ | 1994 |
|
RU2095799C1 |
| GB 1294291 A, 25.10.1972 | |||
| ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ | 1996 |
|
RU2112197C1 |

