ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Предлагаемое изобретение относится к области военной техники и может быть использовано при автоматическом поражении подвижной цели с учетом ее местоположения и параметров движения, а также с учетом параметров оружия.
ХАРАКТЕРИСТИКА ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ И ЕГО НЕДОСТАТКИ
Известен способ наведения оружия пусковыми устройствами (ПУ) с помощью оптико-электронных систем (ОЭС), типа Корнет-Э" и «Квартет» [1, 2], которые характеризуются:
- простотой в обращении, не требующей от обслуживающего персонала высокой квалификации;
- универсальностью применения, поражением как наземных, так и воздушных целей вне зоны эффективного ответного огня противника;
- боевой работой в положениях "лежа", "с колена", "стоя в окопе", с подготовленных и неподготовленных огневых позиций;
- блочно-модульным принципом построения ПУ, его малой массой и габаритами, универсальностью узлов крепления, дающих возможность разместить ПУ на различных носителях, в том числе на джипах.
Ракета комплекса "Корнет-Э" управляется либо визуально, с использованием прицела - прибора наведения, либо с помощью лазерно-лучевого канала стабилизированного прицела боевой машины, при этом:
- в видоискателе комплекса отображают перекрестье и цель;
- наводят изображение перекрестья на цель поворотом оружия;
- определяют дальность цели с помощью дальномера;
- используют полученное значение дальности для коррекции положения перекрестья прицела;
- наводят перекрестье прицела на предполагаемое положение цели, учитывая ее дальность и скорость перемещения [1, 2].
Известный способ не обеспечивает необходимой скорости и точности прицеливания, поскольку наведение маркера на цель и последующее после пуска ракеты сопровождение цели осуществляется либо визуально, либо посредством управляющего излучения лазерного лучевого канала, демаскирующего пусковую установку; кроме того, в способе не учитываются автоматически скорость и угол возвышения цели и поэтому метод не обеспечивает наиболее вероятное и быстрое ее поражение, кроме того, стрелок подвергает себя опасности, выдавая лазерным излучением и выстрелом свое местоположение.
Известен также способ [3] автоматического наведения оружия при стрельбе по скоростным низколетящим целям (прототип). В известном способе осуществляется обзор заданного сектора, обнаружение цели и наведение оружия (гранатомета) по координатам, выданным обзорно-прицельной системой (ОПС), которая включает два прицела, установленных на заданном базовом расстоянии друг от друга, каждый из прицелов снабжен двухкоординатным поворотным устройством, а выход прицела электрически соединен с выходом координатора ОПС и со входом монитора мультиплексора.
Известный метод имеет ряд недостатков, снижающих точность наведения оружия:
- ошибка между реальным положением ствола оружия и двухкоординатным поворотным устройством, положение которого зависит от рабочей температуры;
- систематическая двухкоординатная угловая ошибка между координатами ОПС и датчиками оружия, показания которых также зависят от рабочей температуры;
- двухкоординатная динамическая ошибка, возникающая при наведении оружия на движущуюся цель.
Кроме того, в известной системе не устраняются динамические ошибки, связанные с приводами следящей системы и пускового устройства (вследствие их гистерезиса, люфта, динамического отставания), а также статические ошибки датчиков положения ствола оружия.
ТЕХНИЧЕСКАЯ ЗАДАЧА, РЕШАЕМАЯ ИЗОБРЕТЕНИЕМ
Целью предлагаемого изобретения является повышение точности прицеливания с учетом параметров и условий движения цели (например, ее дальности, угла возвышения и рабочей температуры среды), наведение оружия в расчетное направление с автоматическим обеспечением требуемого угла упреждения, и выстрел в расчетный момент времени без участия стрелка. При этом ошибка наведения оружия и риск поражения стрелка минимизируются.
В заявляемом способе на этапе прицеливания не осуществляется каких-либо внутренних перемещений ОЭС относительно внешних ориентиров, а также взаимного перемещения узлов внутри ОЭС; это позволяет исключить почти все динамические ошибки прицеливания и минимизировать угловую ошибку координат цели при ее встрече с оружием до величины углового разрешения ОЭС.
Кроме того, в заявляемом способе исключается постоянное демаскирующее сопровождение цели прицелом, например действиями стрелка (стрелок может находиться в укрытии в течение всего цикла борьбы с целью), используются одиночные (или пары) импульсов излучателя (РЛС или лазера), при этом резко сокращается энергетический и временной контакт с целью между моментом ее обнаружения и выстрелом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Способ наведения оружия с помощью прицела, содержащего дальномер и оптико-электронную систему (ОЭС) с матричными фотоприемным устройством (МФПУ), при котором:
1. Формируют периодическое, с частотой кадровой развертки ОЭС тепловизионное изображение сектора военных действий, после обнаружения цели оператором (стрелком) его задача:
- с помощью пульта управления и двухкоординатного привода ОЭС сменить положение линии визирования (ЛВ) ОЭС, переводя изображение цели в такую область поля зрения ОЭС, в которой цель будет наблюдаться в течение времени, достаточного для прицеливания;
- набросить маркер ОЭС на изображение цели, после чего застабилизировать положение ЛВ ОЭС на несколько (~ 10-20 кадров ОЭС);
2. Маркер ОЭС выдает на вычислитель угловые координаты цели (азимут - βi и угол места - εi) в начале каждого кадра. Так как при перемещении цели ЛВ ОЭС неподвижна, то вычислитель ОЭС периодически выдает текущие угловые координаты цели на дальномер, ось которого переводится в направлении маркера цели.
3. Через определенный интервал времени, достаточный, чтобы оптическая ось дальномера достигла цели, дальномер посылает импульс излучения, синхронизированный с кадровой разверткой ОЭС, в первый раз определяет дальность цели (D1) и передает эти данные на вычислитель прицела, обеспечивая вместе с угловыми координатами цели получение первой триады данных (угла места β1, азимута ε1 и дальности D1). Эта триада данных запоминается в памяти вычислителя ОЭС.
4. Через определенное время Δt0, кратное периоду кадровой развертки, дальномер вторично измеряет дальность цели и передает информацию о дальности на ОЭС, которая формирует вторую триаду данных (ε2, β2 и D2) о положении цели относительно ОЭС.
5. Используя обе триады данных и известный интервал времени Δt0 вычислитель ОЭС прогнозирует положение цели (β3, ε3, D3) в момент ее встречи с оружием TП; причем при задании величины TП учитываются:
- динамические параметры привода ОЭС, определяемые задержкой привода;
- величина разностных координат второй и первой триады данных;
- скорость и дальность цели;
- время полета оружия с учетом:
а) возвышения цели;
б) температуры окружающей среды;
в) направления и скорости ветра.
6. После этого стабилизация ЛВ ОЭС снимается, ОЭС вместе со стволом оружия поворачивается в направлении расчетного положения цели на углы Δβ=β3-β1 и Δε=ε3-ε1; при этом центр поля зрения ОЭС, (т.е. ЛВ ОЭС) и ствол оружия остаются коллинеарными в процессе прицеливания и направляются в точку A с прогнозируемыми угловыми координатами (β3, ε3).
7. После установки ЛВ ОЭС в направлении т. A, в рассчитанный момент времени TП прицел автоматически дает команду на выстрел.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 показаны фазы работы ОЭС, дальномера и прицела:
на фиг. A1:
1 - исходное поле зрения ОЭС;
2 - исходное поле зрения дальномера;
на фиг. A2-1 и A2-2:
3 - местоположение обнаруженной цели;
4 - поле зрения ОЭС 1 вместе с полем зрения дальномера 2 поворачиваются (на углы Δβ0 и Δε0) так, чтобы цель 3 возможно дольше оставалась в поле зрения ОЭС 1 при неподвижном поле зрения ОЭС 1;
на фиг. A3 показано положение цели, после стабилизации линии визирования ОЭС 1;
на фиг. A4 показан:
- поворот дальномера на углы по данным ОЭС 1 в направлении цели 3 и, после достижения заданных угловых координат, дальномер 2 в первый раз определяет дальность цели D1; в этот же момент ОЭС 1 определяет угловые координаты цели 3 (β1, ε1);
- угловое смещение цели до координат (β2, ε2); по данным ОЭС 1 и измерение ее дальности D2 в калиброванное время Δt=n·Tк, где n - калиброванное число кадров ОЭС 1, Tк - период кадровой развертки;
- смещение цели до координат (β3, ε3) в расчетное время пуска оружия и до встречи оружия с целью;
на фиг. A5 показано требуемое для встречи с целью упреждающее смещение линии визирования ОЭС 1 в координаты (β3, ε3), в момент пуска оружия. Расчетные координаты (β3, ε3) выданы на приводы ОЭС 1 с учетом времени их поворота. Приводы дальномера неподвижны.
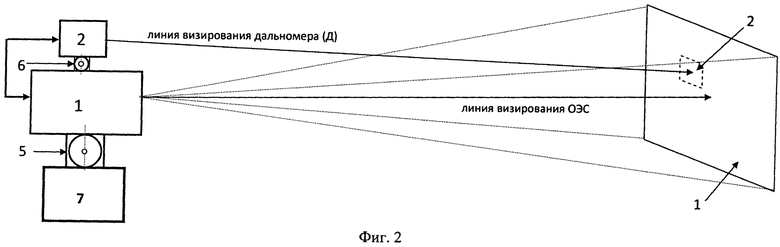
На фиг. 2 показано пространственное расположение полей зрения ОЭС 1 и дальномера 2:
1 - ОЭС;
2 - дальномер;
5 - двухкоординатное поворотное устройство прицела, углы поворота ЛВ дальномера относительно ЛВ ОЭС 1 задаются командами ОЭС 1;
6 - двухкоординатное поворотное устройство дальномера 2;
7 - жесткое основание прицела.
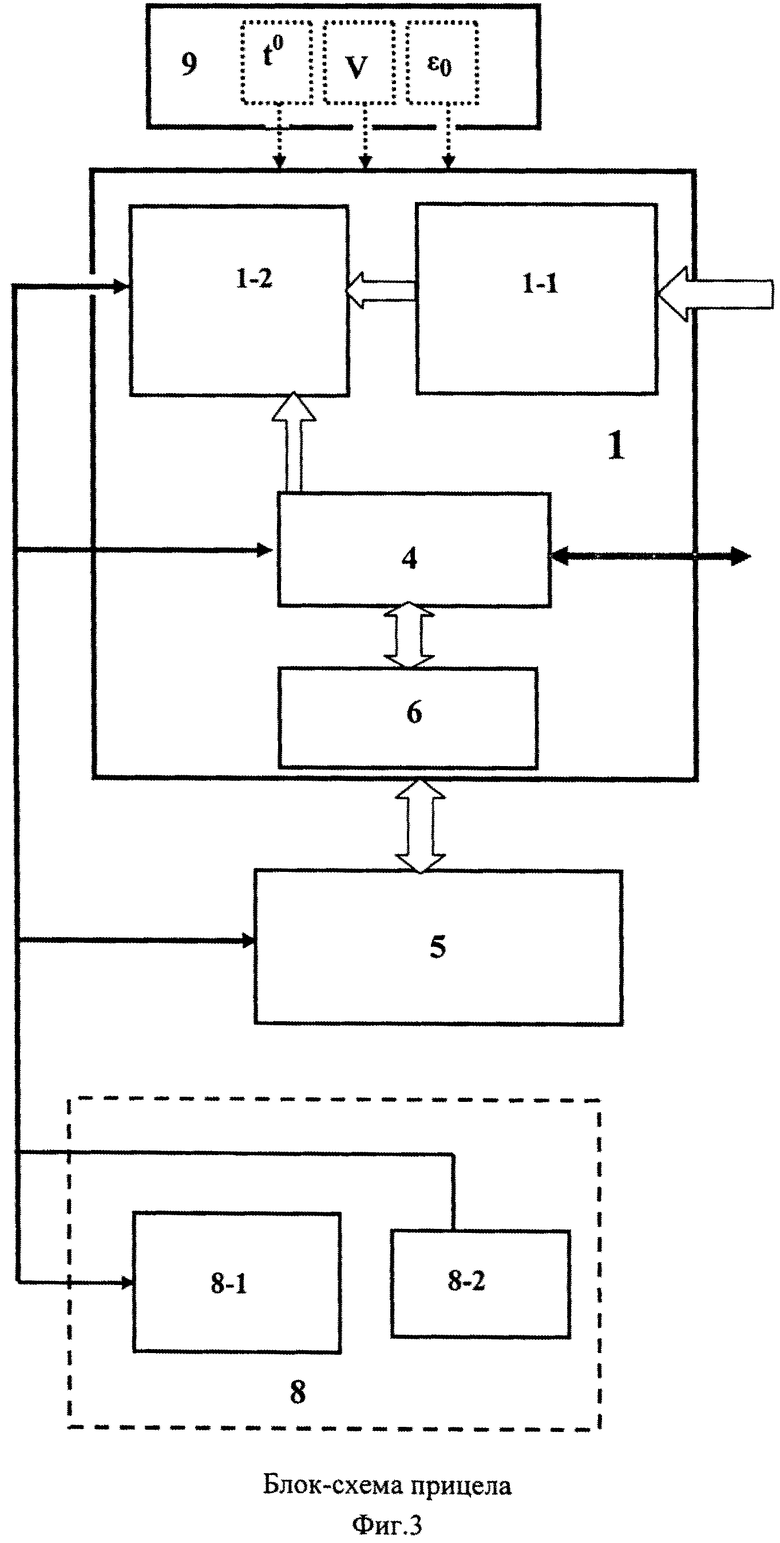
На фиг. 3 приведена блок-схема прицела. Здесь:
1 - ОЭС
1-1 - объектив с МФПУ ОЭС;
1-2 - МЭО и вычислитель;
8 - блок управления прицелом;
8-1 Монитор;
8-2 Пульт дистанционного управления
9 - датчики условий работы прицела:
- t0 - рабочая температура среды;
- V - скорость ветра;
- ε0 - угол места цели.
Примечания:
а) типичная расходимость луча дальномера 0,5×2,0 мрад;
б) требуемая точность наведения дальномера 2 на точечную цель не хуже 0,25×1,0 мрад;
в) диапазон углов поворота дальномера 2 - в пределах поля зрения ОЭС 1.
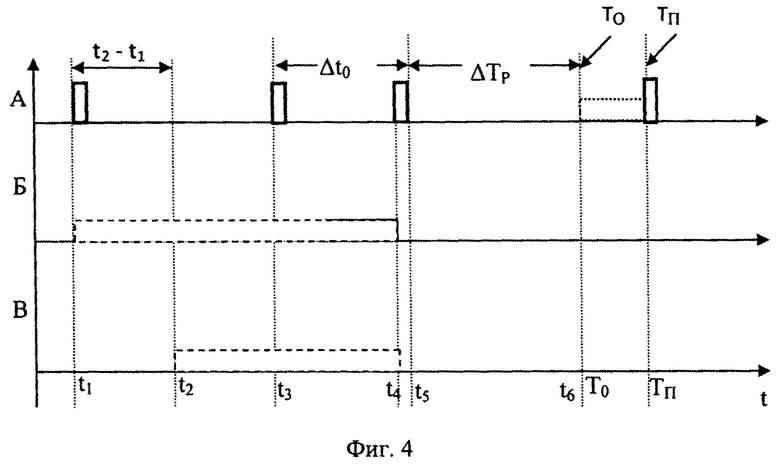
На фиг. 4 приведена временная диаграмма работы прицела.
А - время работы ОЭС 1 от момента обнаружения цели 3 до пуска оружия;
Б - интервал времени работы дальномера 2;
В - интервал времени выдачи дальномером 2 двух троек координат цели 3;
Г - интервал времени Δt0 для выдачи пары троек координат ОЭС 1 с дальномером 2.
t1 - обнаружение цели ОЭС 1,
t2-t1 - оптические оси ОЭС 1 и дальномера 2 переводится в нужную точку поля зрения ОЭС 1,
t4-t1 - активная работа привода дальномера 2 по командам ОЭС 1,
t3-t2 - поворот дальномера 2 и выдача первой тройки координат цели на ОЭС 1 в момент t3;
t4-t3 - расчетная задержка на Δt0 импульса дальномера 2 для установления второй тройки координат цели;
t4 - выдача второй тройки координат цели;
t5-t4 - проведение расчетов, прогнозирующих положение цели на линии визирования ОЭС в момент t7;
ΔTР - вычисленное время доворота ЛВ ОЭС до расчетного положения;
T0 - расчетный момент выстрела.
ΔTП - вычисленное время полета снаряда до встречи с расчетной точкой;
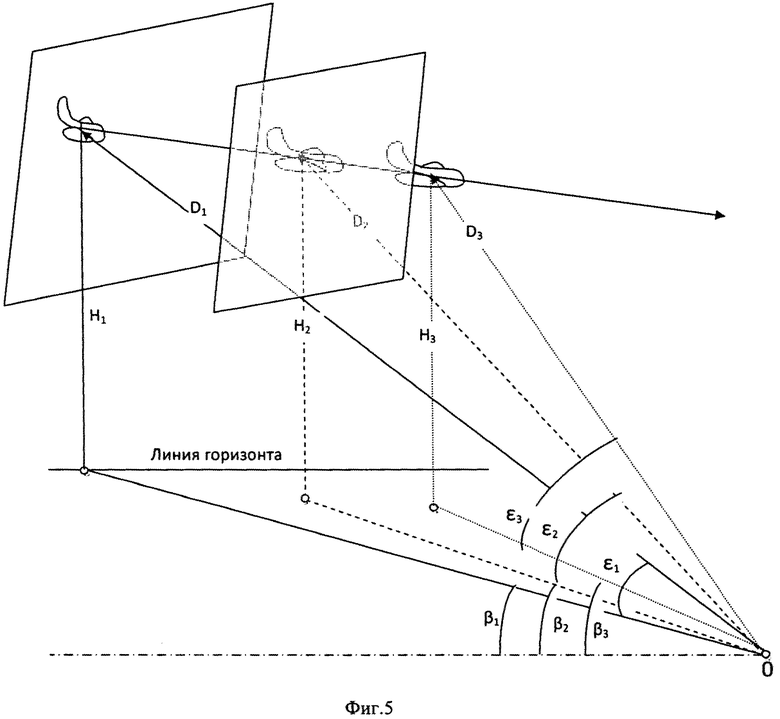
На фиг. 5 показана пространственная панорама при определении координат воздушной цели 3. Все обозначения эквивалентны приведенным на фиг. 2 и 3.
ПРИМЕР ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Поиск цели осуществляется оператором либо вручную, с помощью блока управления либо посредством автоматической развертки поля зрения ОЭС по заданной программе.
В случае обнаружения подвижной цели (фиг. 1 (A2-1 и A2-2)), в момент времени t1 оператор последовательно осуществляет следующие операции:
- осуществляет по траектории движения цели установку ЛВ ОЭС так, чтобы при своем движении цель проходила по большей части поля зрения ОЭС (интервал времени t1-t2);
- переводит режим работы прицела на автоматический, при этом осуществляется передача текущих угловых координат цели с вычислителя ОЭС на дальномер (t2);
- в момент времени t3 поле зрения дальномера достигает угловых координат, данных ОЭС и происходит первое определение дальности цели дальномером; эта дальность передается в вычислитель ОЭС, которым определяются трехмерные координаты цели (ε1, β1, D1);
- по мере движения цели угловые координаты меняются, оптическая ось дальномера постоянно наводится по текущим угловым координатам цели, определяемым ОЭС прицела по положению цели в поле зрения ОЭС, причем линия визирования ОЭС остается неподвижной;
- через определенный интервал времени Δt0, в момент t4 дальномер вторично передает данные (D2) о дальности цели; причем величина Δt0 выбирается из следующих условий:
а) кратность Δt0 периоду кадровой развертки TК;
б) общая длительность Δt0 не должна быть слишком малой, так как при ее уменьшении возрастает ошибка по дальности; но не может быть и слишком большой, так как цель может изменить параметры движения. Наиболее приемлемая величина Δt0≈(5…10)*TК;
- в момент времени t4 ОЭС также выдает в память вычислителя угловые координаты ε2, β2, которые вместе с дальностью D2, обеспечивают вторую триаду чисел (ε2, β2, D2) определяющих второе положение цели (фиг. 1 A4), после чего определение дальности цели и ее угловых координат на дальномер прекращается и вычислитель ОЭС переходит в режим расчета вероятного положения цели через калиброванное время TП; с учетом:
- необходимого времени TР на поворот ЛВ ОЭС в точку с координатами ε3, β3;
- времени ожидания появления цели в расчетном номере кадра в его центре - TО;
- затем автоматически в момент времени TП производится выстрел.
Преимущества и особенности предлагаемого способа заключаются в следующем:
1. Стрелок может постоянно находиться в укрытии и не обнаруживать своего местоположения даже после промаха при выстреле.
2. Неподвижная ОЭС на этапе первичной установки ЛВ (при получении первой и второй триады данных о цели) повышает точность прицеливания, поскольку текущие угловые координаты цели отсчитываются в поле зрения ОЭС с матричным фотоприемником в стационарном режиме; при этом отсутствуют систематические ошибки, свойственные прототипу с механическим наведением оружия при последовательном сопровождении цели.
3. Общее количество кадров от момента обнаружения цели до выстрела может быть сведено к 5…10 кадрам, тогда задержка от момента обнаружения до выстрела при автоматическом наведении составит 0,2…0,5 с, то есть много меньше, чем при ручном наведении.
4. Двухкоординатный поворот ЛВ ОЭС (вместе со стволом оружия) должен обеспечивать ошибку не более половины мгновенного угла зрения ОЭС и может быть реализован с помощью шагового привода в режиме дробления шага.
5. Точность наведения оптической оси дальномера может быть невысокой, ошибка наведения может быть соизмерима с шириной диаграммы направленности зондирующего луча дальномера; а быстрый независимый поворот его оптической оси (в пределах поля зрения ОЭС) может быть решен простыми методами.
ЛИТЕРАТУРА
1. Возимо-переносной противотанковый ракетный комплекс "Корнет-Э".
2. Пусковая установка "Квартет".
3. Патент № 2292005, кл. F41H 11/02.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЦЕЛИВАНИЯ | 2016 |
|
RU2677705C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2436030C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2218544C2 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2004 |
|
RU2275581C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2005 |
|
RU2298759C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2006 |
|
RU2324134C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2217684C2 |
| БЕЗОПАСНЫЙ СПОСОБ СТРЕЛЬБЫ (ЕГО ВАРИАНТЫ) И БЕЗОПАСНЫЙ ПРИЦЕЛ ДЛЯ СТРЕЛЬБЫ ПО ДВИЖУЩИМСЯ ЦЕЛЯМ | 2010 |
|
RU2447391C2 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ С АВТОМАТОМ КОРРЕКТИРОВАНИЯ СТРЕЛЬБЫ | 2008 |
|
RU2363910C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ СТРЕЛЬБЫ ИЗ ВООРУЖЕНИЯ САМОХОДНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571530C1 |
Изобретение относится к области военной техники. Способ автоматического наведения оружия на подвижную цель, при котором осуществляют формирование периодического, с кадровой частотой, изображения поля военных действий, а после обнаружения цели, определения ее дальности, скорости перемещения и возвышения устанавливаются углы упреждения оружия для последующего выстрела отличается тем, что, с целью повышения вероятности поражения цели и обеспечения безопасности стрелка, после обнаружения цели стрелок с помощью пульта дистанционного управления переводит изображение цели в такую область поля зрения оптико-электронной системы (ОЭС) прицела, которая позволила бы при стабильном положении линии визирования (ЛВ) ОЭС наблюдать цель в течение времени, достаточного для первой операции прицеливания; при этой операции положение ЛВ ОЭС стабилизируется в пространстве; на изображение цели ОЭС набрасывают маркер; переводят режим работы прицела в автоматический, при котором маркер ОЭС перемещается вместе с целью, и ОЭС в начале каждого кадра передает данные об угловых координатах цели (азимут и угол места) на дальномер; дальномер автоматически поворачивается в направлении координат, выдаваемых ОЭС, и по мере входа цели в поле зрения маркера дальномера он посылает импульс излучения и определяет дальность цели, которую передает на прицел, обеспечивая получение первой триады данных (угла места, азимута и дальности цели), которые запоминаются в памяти прицела; через время Δt0, кратное периоду кадровой развертки ОЭС, дальномер вторично измеряет дальность цели и вторично передает информацию о дальности цели в память прицела, который автоматически формирует вторую триаду данных о положении цели относительно прицела; вычислитель прицела, используя обе триады данных и известный интервал времени Δt0, прогнозирует положение цели в определенный момент времени TП; причем при расчете величины TП учитываются: скорость цели; дальность и угол возвышения цели; время полета снаряда с учетом возвышения цели; динамические параметры привода прицела (время поворота прицела в расчетную точку); величина разностных координат второй и первой триады данных; температура окружающей среды; направление и скорость ветра; затем стабилизация ЛВ ОЭС снимается и прицел со стволом оружия поворачивается в направлении предсказанного положения; после установки прицела в расчетное положение в определенный момент времени TП автоматически производится выстрел. Техническим результатом изобретения является повышение точности прицеливания с учетом параметров и условий движения цели (например, ее дальности, угла возвышения и рабочей температуры среды), наведение оружия в расчетное направление с автоматическим обеспечением требуемого угла упреждения, и выстрел в расчетный момент времени без участия стрелка. 1 н.п., 5 ил.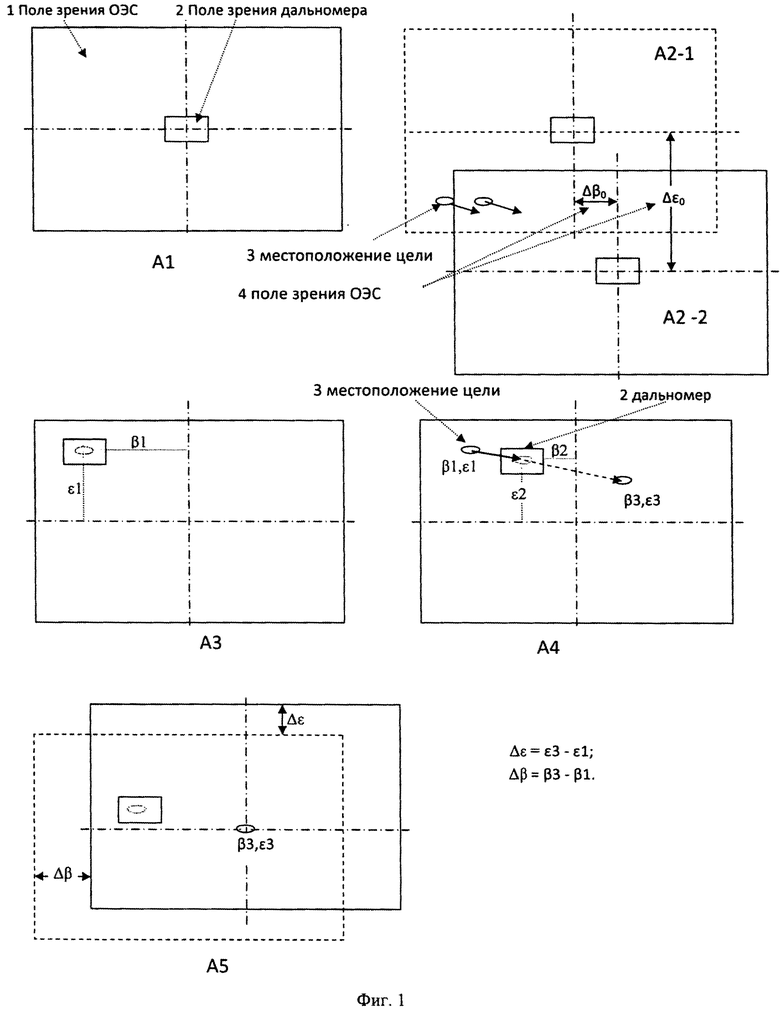
Способ автоматического наведения оружия на подвижную цель, при котором осуществляют формирование периодического, с кадровой частотой, изображения поля военных действий, а после обнаружения цели, определения ее дальности, скорости перемещения и возвышения устанавливаются углы упреждения оружия для последующего выстрела, отличающийся тем, что, с целью повышения вероятности поражения цели и обеспечения безопасности стрелка, после обнаружения цели стрелок:
- с помощью пульта дистанционного управления переводит изображение цели в такую область поля зрения оптико-электронной системы (ОЭС) прицела, которая позволила бы при стабильном положении линии визирования (ЛВ) ОЭС наблюдать цель в течение времени, достаточного для первой операции прицеливания;
- при этой операции положение ЛВ ОЭС стабилизируется в пространстве;
- на изображение цели ОЭС набрасывают маркер;
- переводят режим работы прицела в автоматический, при котором маркер ОЭС перемещается вместе с целью, и ОЭС в начале каждого кадра передает данные об угловых координатах цели (азимут и угол места) на дальномер;
- дальномер автоматически поворачивается в направлении координат, выдаваемых ОЭС, и по мере входа цели в поле зрения маркера дальномера он посылает импульс излучения и определяет дальность цели, которую передает на прицел, обеспечивая получение первой триады данных (угла места, азимута и дальности цели), которые запоминаются в памяти прицела;
- через время Δt0, кратное периоду кадровой развертки ОЭС, дальномер вторично измеряет дальность цели и вторично передает информацию о дальности цели в память прицела, который автоматически формирует вторую триаду данных о положении цели относительно прицела;
- вычислитель прицела, используя обе триады данных и известный интервал времени Δt0, прогнозирует положение цели в определенный момент времени TП; причем при расчете величины TП учитываются:
- скорость цели;
- дальность и угол возвышения цели;
- время полета снаряда с учетом возвышения цели;
- динамические параметры привода прицела (время поворота прицела в расчетную точку);
- величина разностных координат второй и первой триады данных;
- температура окружающей среды;
- направление и скорость ветра;
затем стабилизация ЛВ ОЭС снимается и прицел со стволом оружия поворачивается в направлении предсказанного положения; после установки прицела в расчетное положение в определенный момент времени TП автоматически производится выстрел.
| УСТАНОВКА ДЛЯ СТРЕЛЬБЫ ПО СКОРОСТНЫМ НИЗКОЛЕТЯЩИМ ЦЕЛЯМ | 2005 |
|
RU2292005C1 |

