Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к способам и устройствам для наблюдения и обнаружения неисправностей в системах беспроводной связи и, в частности, в цепях приема сигнала в системах беспроводной связи.
Уровень техники
Неисправности иногда возникают даже в большинстве высококачественных систем связи. Множество типов неисправностей, в основном, влияют только на узел, в котором они возникают. Однако неисправности, возникающие в цепи приема сигнала, могут влиять на качество или пропускную способность также в других частях системы связи. Неисправность при приеме сигнала во многих ситуациях может быть интерпретирована так же, как сигнал, имеющий плохие радиоусловия. Средство регулирования уровней мощности и взаимных помех доступно в множестве современных систем, и такие неисправности могут, таким образом, привести к использованию повышенной мощности, более высоким взаимным помехам и, в конечном итоге, к уменьшению полезных ресурсов передачи данных.
В некоторых современных системах оборудование проверяют на наличие неисправностей, используя отдельные процедуры тестирования. Однако такие события тестирования также уменьшают общие доступные ресурсы передачи данных. Значительные неисправности могут детектироваться по внезапным перерывам нормального трафика. Однако меньшие неисправности или неоптимальную работу разных частей труднее найти. Кроме того, в случае, когда известно, что неисправность присутствует в цепи приема сигнала, обычно требуется приложить определенные усилия для локализации, где в цепи появляется эта неисправность.
Общая проблема в беспроводных системах связи предшествующего уровня техники, таким образом, состоит в том, что наблюдение за неисправностями и детектирование неисправностей часто являются недостаточными.
Раскрытие изобретения
Цель настоящего изобретения состоит в том, чтобы, таким образом, обеспечить улучшенные способы и компоновки для детектирования неисправностей в цепи приема сигнала, то есть от входных каскадов приемника до антенны. Другая цель настоящего изобретения состоит в том, чтобы обеспечить способы и компоновки, которые могли бы работать одновременно с нормальной работой системы связи. И еще одна цель состоит в том, чтобы обеспечить способы и компоновки, которые не влияли бы отрицательно на качество трафика или пропускную способность при передаче данных.
Описанные выше цели достигаются с помощью способов, компоновок, узлов и систем в соответствии с приложенной формулой изобретения. В общей формулировке, в первом аспекте, способ наблюдения за неисправностями цепи приема сигнала в системе беспроводной связи содержит этапы, на которых: предоставляют данные, представляющие измеренные принимаемые значения мощности в цепи приема сигнала в множество моментов времени. Способ дополнительно содержит этап, на котором определяют значения минимального уровня шумов в множество моментов времени на основе данных, представляющих измеренные принимаемые значения мощности. Временную эволюцию для определенных значений минимального уровня шумов регистрируют во множестве моментов времени, и возникновение любой неисправности в цепи приема сигнала детектируют на основе зарегистрированной временной эволюции.
Во втором аспекте компоновка для наблюдения за неисправностями в цепи приема сигнала при беспроводной связи содержит средство предоставления данных, представляющих измеренную принятую мощность в цепи приема сигнала в множество моментов времени и компоновку процессора. Компоновка процессора выполнена с возможностью определения значения минимального уровня шумов в множество моментов времени на основе данных, представляющих измеренную принимаемую мощность. Компоновка процессора, кроме того, выполнена с возможностью оценки временной эволюции определенных значений минимального уровня шумов и детектирования возникновения любой неисправности в цепи приема сигнала на основе временной эволюции.
В третьем аспекте узел, предназначенный для использования в системе беспроводной связи, содержит компоновку в соответствии со вторым аспектом.
В четвертом аспекте система беспроводной связи содержит, по меньшей мере, один узел в соответствии с третьим аспектом.
Одно из преимуществ настоящего изобретения состоит в том, что постоянные наблюдение и детектирование неисправностей могут выполняться одновременно с нормальной работой, и результаты измерений, которые во многих случаях уже доступны, можно использовать для анализа возникновения какой-либо неисправности. Это позволяет поддерживать любые затраты, связанные с реализацией изобретения на низком уровне.
Краткое описание чертежей
Изобретение, вместе с дополнительными его целями и преимуществами, лучше всего будет понятно при ссылке на следующее описание, которое требуется рассматривать совместно с приложенными чертежами, на которых представлено следующее:
фиг.1 - схематичное представление мощности сигнала в системе сотовой связи;
фиг.2 - блок-схема последовательности этапов варианта осуществления способа в соответствии с настоящим изобретением;
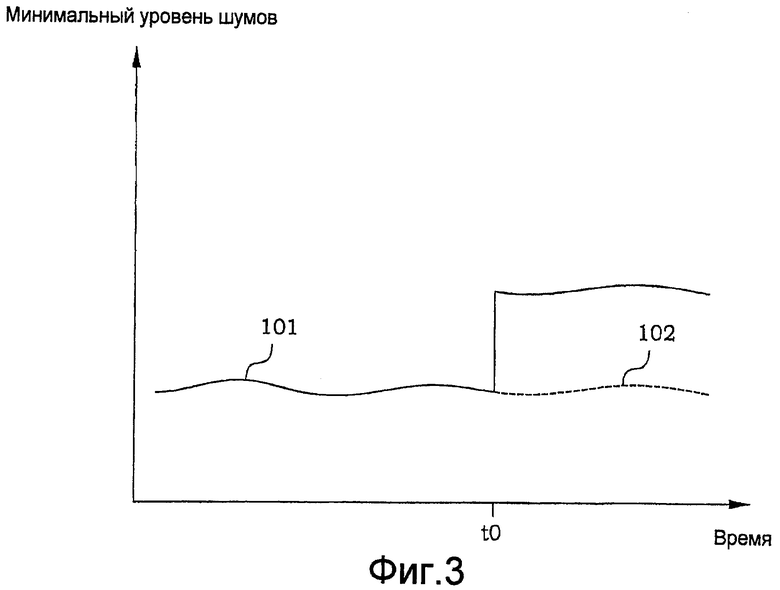
фиг.3 - схема, иллюстрирующая временную эволюцию результата измерения минимального уровня шумов;
фиг.4 - блок-схема варианта осуществления компоновки для определения значений минимального уровня шумов;
фиг.5 - схематичное представление цепи приемника в системе беспроводной связи;
фиг.6A-B - схемы, иллюстрирующие временную эволюцию результатов измерения минимального уровня шумов, определенных в разных точках в цепи приемника;
фиг.7 - блок-схема варианта осуществления компоновки для определения значений минимального уровня шумов в системе связи, имеющей разнесенный приемник;
фиг.8 - блок-схема варианта осуществления системы сотовой связи в соответствии с настоящим изобретением;
фиг.9 - блок-схема варианта осуществления компоновки процессора в соответствии с настоящим изобретением; и
фиг.10 - блок-схема другого варианта осуществления системы сотовой связи в соответствии с настоящим изобретением.
Осуществление изобретения
Во всем описании жирный шрифт букв в уравнениях относится к векторным или матричным величинам.
На чертежах одинаковые номера ссылочных позиций используются для обозначения аналогичных или соответствующих частей.
В настоящем изобретении значение минимального уровня шумов используют с целью детектирования неисправностей. Минимальный уровень шумов обычно определяют в разных системах по множеству других причин, и настоящее описание начинается с короткого обзора, в котором можно найти некоторые примеры такого использования.
Определенную техническую проблему, например, в системах WCDMA (широкополосный множественный доступ с кодовым разделением) и в аналогичных системах, представляет планирование улучшенных каналов восходящей линии связи для временных интервалов, где условия взаимных помех являются благоприятными и где существует достаточная пропускная способность в восходящей линии связи в данной ячейке для поддержания улучшенного трафика по восходящей линии связи. Хорошо известно, что все существующие пользователи ячейки вносят свой вклад в уровень взаимных помех в восходящей линии связи в системах WCDMA, а также свой вклад вносят терминалы в соседних ячейках. Нагрузка ячейки прямо связана с уровнем взаимных помех в этой ячейке.
Для поддержания стабильности ячейки быстрые улучшенные алгоритмы планирования восходящей линии связи работают для поддержания нагрузки ниже определенного уровня. Причина этого состоит в том, что большую часть каналов восходящей линии связи пользователя подвергают управлению мощностью. Моментальное увеличение трафика повышает уровень взаимных помех, и управление мощностью увеличивает мощность для поддержания принимаемого уровня мощности в каждом канале для обеспечения определенного отношения сигнал-взаимные помехи. Если уровень нагрузки слишком высокий, это может привести к неуправляемой нестабильности, так называемому, броску мощности.
Нагрузку ячейки, например, в системе CDMA (множественный доступ с кодовым разделением) обычно соотносят с некоторой количественной величиной, относящейся к мощности. Типично требуется определять количественные величины, относящиеся к мощности, такие как общий уровень мощности и минимальный уровень шумов (в идеале тепловой шум).
Другое важное свойство, которое также требует оценки нагрузки для управления им, представляет собой зону охвата ячейки. Зона охвата обычно связана с определенной услугой, которая должна работать при определенном значении SIR (отношение сигнал/взаимные помехи) для нормального функционирования. Границу ячейки по восходящей линии связи затем определяют с помощью терминала, который работает с максимальной выходной мощностью. Для поддержания зоны охвата ячейки необходимо поддерживать уровень взаимных помех ниже определенного уровня. Это означает, что оценка нагрузки является важной также для зоны охвата. В частности, оценка нагрузки важна с точки зрения зоны охвата при быстром планировании улучшенного трафика восходящей линии связи при RBS (базовая радиостанция). Кроме того, функция управления доступом и управления перегрузкой в контроллере радиосети (RNC), который управляет множеством RBS, также требует точной информации о мгновенном повышении уровня шумов ячейки, которая в свою очередь зависит от измерения минимального уровня шумов.
Разные полезные подходы для оценки значений минимального уровня шумов дополнительно приведены ниже.
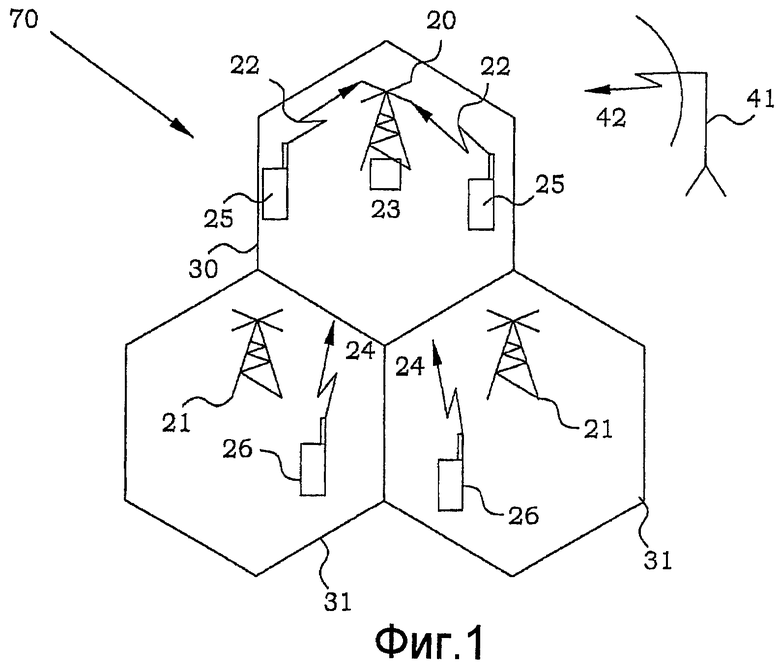
В настоящем изобретении осознают, что временные аспекты значения минимального уровня шумов, то есть то, как значения минимального уровня шумов изменяются со временем, можно использовать для наблюдения за неисправностями и детектирования неисправностей. Различные источники вносят вклад в мощность, измеряемую в приемнике. На фиг.1 иллюстрируется типичная система 70 беспроводной связи. В пределах ячейки 30 присутствует множество мобильных терминалов 25, которые связаны с базовой станцией 20 по разным каналам 22 передачи данных, каждый из которых вносит свой вклад в общую принимаемую мощность базовой станции 20. Ячейка 30 типично имеет множество соседних ячеек 31 в пределах той же системы 70 беспроводной связи, каждая из которых ассоциирована с соседней базовой станцией 21. Каналы 24 связи соседних ячеек 31 также способствуют детектированию радиочастоты в базовой станции 20. Могут также существовать другие внешние для сети источники 41 излучения. И, наконец, составляющая 23 также возникает из самого приемника, и эта составляющая типично обозначена как минимальный уровень шума.
При математическом подходе, результат измерения общей мощности в широкой полосе P RTWP Measurement (t), таким образом, может быть выражен как:
 (1)
(1)
где P i Code (t) представляет мощность сигнала с кодовым номером i, P N (t) представляет минимальный уровень шумов, и P E+N (t) представляет вклад мощности от соседних ячеек и внешних источников, то есть:
 (2)
(2)
где P E представляет вклад от внешних источников и P N представляет вклад из соседних ячеек. e RTWP (t) моделирует измеряемый уровень шумов.
Можно математически доказать, что линейная оценка P E+N (t) и P N не представляют собой наблюдаемую проблему. Только сумма P E+N +P N наблюдается при доступных измерениях.
Минимальный уровень шумов, в принципе, возникает из-за тепловых шумов в цепи принимаемого сигнала. Ошибочное функционирование любого из компонентов в такой цепи принимаемого сигнала типично приводит к повышению до более высокого уровня шумов, чем обычно, в любой точке после компонента, работающего с ошибкой. По одиночному значению минимального уровня шумов очень трудно определить, присутствует ли какая-либо неисправность. Однако, если осуществлять мониторинг или регистрацию временной эволюции минимального уровня шумов или наилучшей оценки минимального уровня шумов, можно получить информацию об изменениях уровня шумов. Некоторые изменения могут поясняться нормально возникающими факторами, такие как погрешности принципов оценки или естественные изменения температуры.
Однако другие изменения можно использовать как детектирование вероятного возникновения неисправности.
На фиг.2 иллюстрируется блок-схема последовательности операций варианта осуществления способа в соответствии с настоящим изобретением. Способ наблюдения за неисправностями в цепи приема сигнала при беспроводной связи начинается на этапе 200. На этапе 210 данные, представляющие измеренные значения принятой мощности в цепи приема сигнала, предоставляют для множества моментов времени. Значение минимального уровня шумов определяют на этапе 220 для множества моментов времени на основе данных, представляющих измеряемую принимаемую мощность. В предпочтительном варианте воплощения этап 220 определения содержит этап 221 получения количественных величин, относящихся к мощности, для множества моментов времени на основе данных, представляющих измеренные принимаемые значения мощности, в результате чего определение минимального уровня шумов основано на этих величинах, относящихся к мощности. На этапе 230 регистрируют временную эволюцию определяемых величин минимального уровня шумов. Любое возникновение неисправности в цепи приема сигнала детектируют на этапе 240 на основе регистрируемой временной эволюции. В предпочтительном варианте воплощения этап детектирования содержит сравнение регистрируемой временной эволюции с моделью временной эволюции и обозначение неисправности, если результат измерений, представляющий разность между регистрируемой временной эволюцией и моделью временной эволюции, превышает пороговое значение. Модель временной эволюции может быть полностью или частично основана на статистической обработке предыдущих зарегистрированных временных эволюций для аналогичных условий. Модель временной эволюции также может быть полностью или частично основана на теоретических моделях ожидаемых временных эволюций для аналогичных условий.
Предполагаемая ситуация показана на фиг.3. Временная эволюция 101 значения минимального уровня шумов представлена здесь на схеме. Вначале значение минимального уровня шумов следует относительно медленно изменяющимся, обычно периодическим вариациям. Такие вариации могут зависеть от неточностей процедур оценки минимального уровня шумов или могут представлять собой результат естественных вариаций температуры. Однако в момент времени t0, можно видеть значительное отклонение от нормального поведения. Такие изменения не могут быть объяснены естественными причинами в хорошо работающей системе и поэтому, вероятно, указывают возникновение неисправности. Модель временной эволюции обозначена кривой 102. Как отмечено выше, модель временной эволюции может быть выведена на основе статистической обработки ранее полученных значений минимального уровня шумов и/или теоретическим путем. В результате определения меры различия между зарегистрированной временной эволюцией значений минимального уровня шумов и моделью временной эволюции может быть получено измерение, отражающее девиацию от нормального уровня. Если такие различия превышают определенное пороговое значение, девиацию можно рассматривать как, вероятно, вызванную появлением неисправности.
Существует множество способов в предшествующем уровне техники для определения разности результатов измерений между двумя последовательностями данных, например временных эволюций. Предоставление и анализ различий как таковых, поэтому, известны из предшествующего уровня техники. Фактически используемые предпочтительные способы, выбранные в настоящем изобретении, зависят от применения и типа используемой меры различия. Детали этих этапов не представляют собой, однако, определенную важность для достижения основных преимуществ применения основных идей в соответствии с настоящим изобретением и, поэтому, исключены из настоящего описания. Любой специалист в данной области техники обладает достаточным уровнем знаний для того, чтобы найти соответствующие способы в любой основной литературе стандартной теории детектирования для воплощения этой части изобретения.
Как отмечено выше, значения минимального уровня шумов уже в настоящее время требуются для различного назначения в системах беспроводной связи. Практически любой способ предоставления такой меры предшествующего уровня техники, основанный на измерениях принимаемых уровней мощности, можно использовать с целью, описанной в настоящем изобретении.
Один подход предоставления значения минимального уровня шумов, используемый для улучшения оценки нагрузки, раскрыт в опубликованной международной заявке WO 2006/076969. Минимальное значение количественной величины, относящейся к мощности, предпочтительно, разность между данными, представляющими, по меньшей мере, два разных типа принимаемой мощности, используют как оценку верхнего предела минимальных тепловых шумов. В дополнительном предпочтительном варианте воплощения эта разность представляет собой разность между мгновенной принятой общей мощностью в широкой полосе пропускания и мгновенной суммой мощностей во всех каналах связи, используемых в одной и той же ячейке. При отсутствии какой-либо подробной информации такой верхний предел можно использовать как оценку используемого минимального уровня шумов. В предпочтительном варианте воплощения минимальное значение определяют в пределах определенного периода времени, получая, таким образом, наилучшую в данный момент времени оценку минимального уровня шумов. Значения минимального уровня шумов, получаемые, таким образом, предпочтительно, также можно использовать вместе с принципами настоящего изобретения.
Оптимальный и программный алгоритм для оценки повышения уровня шумов на основе аналогичной основной идеи минимальных значений раскрыт в опубликованной международной заявке WO 2007/024166. Здесь раскрыта технология оценки, основанная на фильтрации Калмана, в результате чего информацию о минимальном уровне шумов получают как промежуточный результат. При таком подходе этап получения содержит оценку распределений вероятности для количественного значения мощности на основе предоставленных принимаемых уровней мощности. Определение минимального уровня шумов, используемое в настоящем изобретении, затем содержит расчет распределения условной вероятности измерения минимального уровня шумов на основе, по меньшей мере, множества оценок распределения вероятности для упомянутого количественного значения мощности. По такому условному распределению вероятностей можно получить меру минимального уровня шумов, значение минимального уровня шумов.
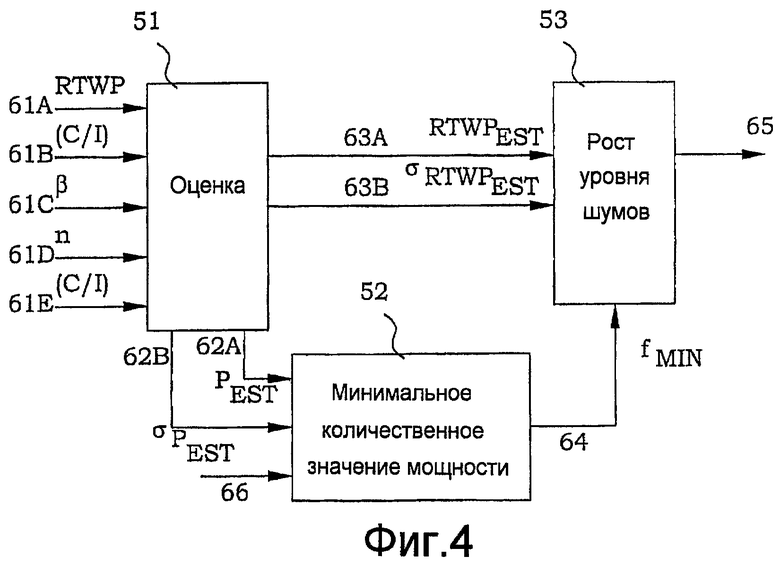
Со ссылкой на фиг.4 будет описан вариант выполнения для определения минимального уровня шума на основе программной оценки. В наиболее передовой форме возможную оценку повышения уровня шумов выполняют в трех основных блоках 51, 52, 53.
Первый блок 51, то есть блок оценки мощности, применяет алгоритм оценки для оценки определенных количественных значений мощности, которые требуются в последующих блоках обработки. В настоящем варианте осуществления оценка представляет собой, так называемый, расширенный фильтр Калмана. В частности, блок 51 принимает множество входов 61A-E в настоящем варианте осуществления, содержащих измеренные результаты принятой общей мощности в широкой полосе пропускания (RTWP) 61A, измеренное отношение мощности кода к уровню взаимных помех (C/I) для канала i 61B, бета-факторы для канала i 61C, множество кодов для канала i 61D, соответствующих отношению мощности кода к взаимным помехам, управляемых по быстрому контуру 61E управления мощностью, и обеспечивает выходные результаты, содержащие оценки 62A, 63A мощности, и соответствующие значения 62B, 63B среднеквадратического отклонения. Выход 62A представляет собой оценку количественного значения мощности, которая представляет собой сумму мощности взаимных помех из соседней ячейки WCDMA, мощности взаимной помехи, находящейся в полосе пропускания не WCDMA сигнала и мощности минимального уровня тепловых шумов, и выход 63A представляет собой оценку принятой общей мощности в широкой полосе пропускания (RTWP), и выход 63B представляет собой соответствующую дисперсию. Вместе с оценкой средних количественных значений мощности значения дисперсии количественных значений мощности определяют оценку функции распределения вероятности (PDF) для количественных значений мощности. Когда выходные величины получают из расширенной компоновки фильтра Калмана, эти параметры представляют собой единственные параметры, необходимые для определения оценки (приблизительного) Гауссова распределения, формируемого с помощью фильтра. Таким образом, достаточно информации задают для определения всей информации распределения вероятности для оценок мощности.
Второй блок 52 относится в настоящем варианте осуществления к технологиям Байесовой оценки для расчета условной функции плотности вероятности экстремального значения 64 одного из упомянутых выше количественных значений мощности. Оценка основана на множестве оценок распределений вероятности, полученных из первого блока 51. Параметры 66, предоставляющие информацию о ранее ожидаемом распределении вероятности мощности минимального уровня шумов, в настоящем варианте осуществления передают в блок 52 оценки распределения условной вероятности для получения оптимальной оценки. Из этой функции плотности условной вероятности экстремального значения 64 может быть определено значение минимального уровня шумов.
В этом конкретном варианте осуществления третий блок 53 выполняет оценку повышения шумов, которая, однако, находится за пределами основного объема настоящего изобретения. В данном варианте осуществления это выполняют путем расчета распределения условной вероятности показателя моментальной оценки распределения 63A, 63B RTWP из блока 51 и распределения условной вероятности минимальной мощности 64 шумов. Оценку 65 повышения шумов, предпочтительно, рассчитывают как условное среднее распределения условной вероятности этого показателя.
Для более крупных систем и более точных моделей сложность расчета быстро увеличивается. Процедуры уменьшения сложности, относящейся к таким алгоритмам, дополнительно раскрыты в опубликованной международной заявке WO 2007/055626 и, предпочтительно, также применяются в области настоящего изобретения.
Что касается предоставления данных, существуют два основных варианта осуществления. В первом варианте осуществления способ включает в себя самостоятельное измерение принимаемой мощности в цепи принимаемого сигнала. Моменты времени измерений, таким образом, можно легко контролировать и интегрировать в остальной части способа. В другом варианте осуществления отдельный способ отвечает за фактическое измерение, и предоставление данных в соответствии с настоящим изобретением в таком случае будет просто содержать прием данных, представляющих измеренную принимаемую мощность в цепи принимаемого сигнала. Информация о моментах времени измерения, предпочтительно, прикреплена к данным и используется во время последующих этапов расчета.
В цепи принимаемого сигнала неисправность может быть определена в соответствии с описанными выше принципами в любом компоненте от антенны до точки, в которой измеряют мощность. На фиг.5 схематично представлена цепь 15 принимаемого сигнала. Антенна 10 соединена с сетью 13 через последовательность модулей 11A-D обработки сигнала. Мощность принимаемого сигнала, в принципе, может быть определена на разных этапах 12A-E во время обработки сигнала в цепи 15 приема сигнала. Если мощность измеряют или определяют по-другому, например, на этапе 12C, неисправности, возникающие в антенне 10 или в модулях 11A и 11B обработки сигнала, можно детектировать, используя принципы, описанные выше. Однако неисправности в модулях 11C и 11D обработки сигнала не могут быть детектированы. Если мощность вместо этого измеряют на этапе 12E, неисправности во всех модулях 11A-D обработки сигнала могут быть детектированы. Однако в таком случае, вместо этого, может быть трудно определить место, в котором возникла ошибка в цепи 15 принимаемого сигнала.
Если вместо этого мощность измеряют более, чем на одном этапе, то есть, по меньшей мере, в двух положениях в цепи 15 принимаемого сигнала, может быть предоставлено больше информации. Если выполняют независимые измерения мощности, например на этапе 12B и 12E, неисправность может быть детектирована в любом месте в цепи 15 принимаемого сигнала. Кроме того, также, вероятно, обеспечивается возможность локализации неисправности, присутствующей перед или после этапа 12B.
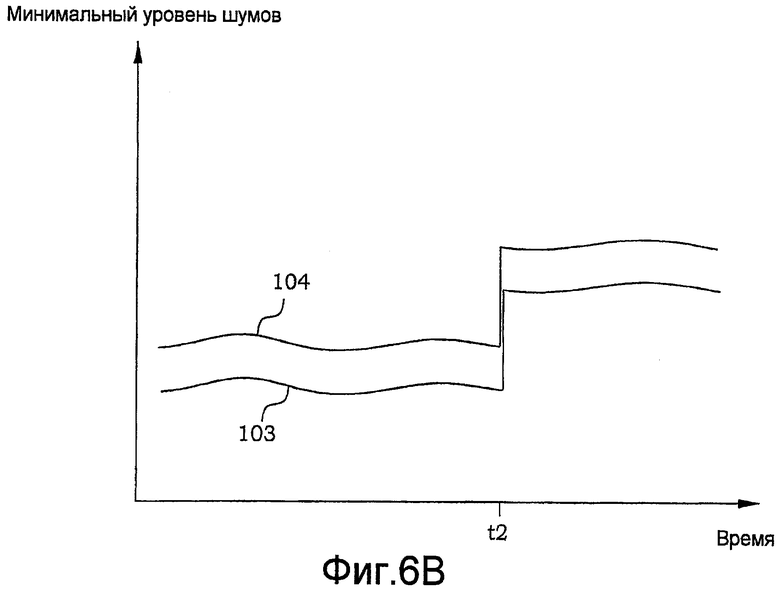
Это дополнительно иллюстрируется на схеме, показанной на фиг.6A и 6B. Временная эволюция значений минимального уровня шумов на основе измерений на этапе 12B и 12E по фиг.5 иллюстрируется как кривые 103 и 104 соответственно на фиг.6A. Различия минимального уровня шумов типично ассоциированы с дополнительными шумами, возникающими в модулях 11B-D обработки сигнала. На фиг.6A, в момент времени t1, кривая 104, ассоциированная с измерениями, выполненными на этапе 12E, представляет странное поведение. Однако кривая 103, ассоциированная с измерениями, полученными на этапе 12B, следует более нормальному пути. В результате сравнения кривых может сделать вывод, что неисправность, вероятно, возникла в цепи 15 принимаемого сигнала между положениями измерений, например, в любом из модулей 11B-D обработки сигнала. Аналогично, временная эволюция для другой ситуации значений минимального уровня шумов на основе измерений, выполненных на этапе 12B и 12E на фиг.5, иллюстрируются как кривые 105 и 106 соответственно на фиг.6B. Здесь обе кривые представляют неожиданное поведение в момент времени t2. Неожиданное поведение обозначает, что присутствует неисправность. Поскольку обе кривые проявляют эти изменения, можно сделать вывод, что неисправность, вероятно, возникла в цепи 15 принимаемого сигнала перед первой точкой измерений, то есть в антенне или в модуле 11A обработки сигнала.
Если временные эволюции значений минимального уровня шумов доступны для более чем одной точки в цепи принимаемого сигнала, их можно, прежде всего, использовать как избыточность для детектирования неисправностей. Кроме того, они могут, как описано выше, быть использованы как взаимные модели временных эволюций, что обеспечивает возможность выполнять, в некотором роде, пространственные определения неисправностей. Другими словами, предоставляют данные, представляющие измеренные уровни принимаемой мощности, по меньшей мере, в двух положениях в цепи принимаемого сигнала. Определение минимального уровня шумов затем содержит определение отдельных значений минимального уровня шумов, по меньшей мере, для двух положений. Детектирование, таким образом, может быть основано на сравнении между зарегистрированными временными эволюциями определенных значений минимального уровня шумов, по меньшей мере, для двух положений.
Определение минимального уровня шумов в нескольких положениях является особенно предпочтительным в системах, представляющих разнесение приемника. В радиотехнологиях MIMO (с множеством входов и множеством выходов) используют разнесение приемника. Радиотехнологии MIMO разделяют/смешивают поступающие потоки битов в один отдельный поток для каждой ветви передачи. Эти ветви, предпочтительно, построены так, что передаваемое множество битовых потоков в наиболее возможной степени является нескоррелированным в принимаемых ветвях приема приемника. Это может быть, например, достигнуто, используя разную поляризацию и/или, используя ветви передачи, которые расположены в достаточно отличающихся друг от друга местах положения (пространственное разнесение). Преимущество концепции MIMO состоит в том, что если корреляция между потоками битов достаточно мала на конце приема, пропускная способность может быть повышена с коэффициентом, равным количеству ветвей передачи. Это связано с тем, что каждую ветвь передачи можно рассматривать как отдельный канал, использующий полную спектральную полосу пропускания для выделенного канала. Техническая проблема состоит в том, чтобы обеспечить полную некоррелированность передаваемых битовых потоков на приемном конце, при одновременном поддержании достаточно малых размеров антенны. Это может потребовать большого искусства в малом переносном терминале, хотя разнесение по поляризации, выглядит многообещающим для таких вариантов применения.
В варианте осуществления настоящего изобретения, в случае когда в системе беспроводной связи предусмотрено разнесение приемников и цепь приема сигнала, поэтому, содержит, по меньшей мере, две ветви приема, способ детектирования неисправностей, предпочтительно, содержит определение отдельных значений минимального уровня шумов, по меньшей мере, для двух ветвей приемника. В вариантах осуществления, использующих промежуточные количественные величины, относящиеся к мощности, эти количественные величины, относящиеся к мощности, сопоставляют с принимаемой мощностью, по меньшей мере, в двух ветвях приемника. Это означает, что детектирование может быть основано на сравнении между временными эволюциями определяемых значений минимального уровня шума и, по меньшей мере, двумя ветвями приемника. Исходное различие можно использовать как калибровку между ветвями приемника, в то время как последующие различия между ветвями представляют собой показатели различий работы, например возникновение неисправности.
Для полного использования концепции MIMO, было разработано большое количество специализированных радиоалгоритмов. В настоящее время важную предпосылку использования схем обработки MIMO представляет модель используемых каналов. Как правило, эти модели каналов должны быть сформированы индивидуально для каждой ветви MIMO. Причина этого состоит в том, что вариации компонентов приводят к вариациям коэффициента масштабирования (для мощности) между ветвями приемника более чем на а дБ. Альтернатива может представлять собой калибровку ветвей приемника и расчет модели канала, путем обработки всех результатов измерений одновременно. Можно ожидать, что такая процедура может быть более эффективной, например, поскольку доступно большее количество предварительной информации, то есть ветви приемника калибруют. Такая калибровка, однако, является дорогостоящей.
Когда используют алгоритмы оценки вместе с системами разнесения приемника, вместо этого можно моделировать взаимное влияние между различными ветвями приемника, и они могут быть включены в алгоритм. Это, в общем, повышает надежность оценки. В одном таком варианте осуществления во множество моментов времени представляют данные измерений принятой общей мощности в широкой полосе пропускания для, по меньшей мере, первой ветви приемника и второй ветви приемника. Определение значений минимального уровня шумов содержит оценку множества моментов времени, распределение вероятности для первого количественного количественных выражений мощности и второго количественного значения мощности, причем оба они связаны с выбранными переменными состояния алгоритма оценки по количественным величинам, представляющим измеренную принятую общую мощность в широкой полосе пропускания первой ветви приемника, а также второй ветви приемника, используя выбранные функции измерения выбранных переменных состояния алгоритма оценки. Выбранные переменные состояния соответствуют количественным значениям мощности ячейки, и выбранные функции измерения соответствуют количественным значениям, представляющим измеренную принятую общую мощность в широкой полосе пропускания первой и второй ветвей приемника. Определение дополнительно содержит расчет распределения условной вероятности первого результата измерений минимального уровня шумов на основе, по меньшей мере, множества оценок распределения вероятности для первого количественного значения мощности, и распределение условной вероятности второго результата измерения минимального уровня шумов, на основе, по меньшей мере, множества оценок распределения вероятности для второго количественного значения мощности. Предоставление значения минимального уровня шумов затем основано на рассчитанных распределениях условной вероятности первого и второго результатов измерений минимального уровня шумов.
Технологии оценки нагрузки в соответствии с WO 2007/024166 можно применять также в случаях разнесения приемника и MIMO. В соответствии с настоящим вариантом выполнения оценку нагрузки не выполняют отдельно для ветви, но вместо общей обработки количественных значений мощности во всех ветвях, однако, все еще обеспечивают оценки минимального уровня шумов для отдельных ветвей. При применении в случае разнесения приемника и MIMO, ветви приемника идеально некоррелированы друг с другом. В действительности, однако, определенная степень корреляционной связи сохраняется. Благодаря применению настоящего варианта осуществления, такую корреляцию можно использовать для улучшения оценки минимального уровня шумов. Более конкретно, корреляция улучшает оценку, так называемой, остаточной мощности, используя более общую структуру фильтра, чем применялась до сих пор. Корреляцию затем моделируют путем ввода корреляции в совместную ковариационную матрицу шумов объединенных систем.
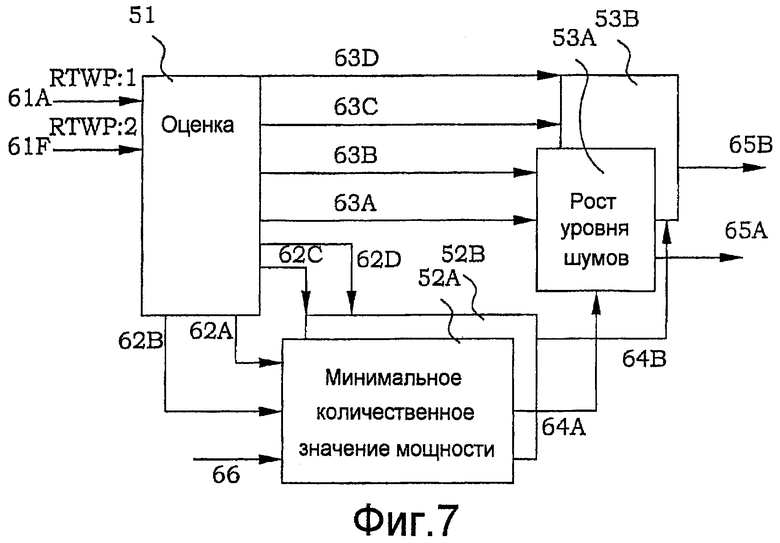
На фиг.7 иллюстрируется один вариант выполнения программной оценки минимальной мощности уровня тепловых шумов в соответствии с настоящим изобретением. В данном конкретном варианте осуществления меру минимального уровня шумов также используют с целью оценки нагрузки. В данном варианте осуществления присутствуют две ветви приемника. В частности, блок 51 принимает входы 61A, 61F, содержащие измеренную принятую общую мощность в широкой полосе пропускания (RTWP) для первой ветви 61A приемника и RTWP для второй ветви 61F приемника. Оценка расширенного фильтра Калмана в блоке 51, таким образом, основана на входах для обеих ветвей приемника. Фильтр Калмана обеспечивает выходы, содержащие два набора оценок 62A, 63A, 62C, 63C мощности и соответствующие среднеквадратичные отклонения 62B, 63B, 62D, 63D. Выход 62A, как и выше, представляет собой оценку количественного значения мощности, ассоциированного с первой ветвью приемника. Выход 62C представляет собой количественное значение мощности, ассоциированное со второй ветвью приемника. Выход 63A представляет, как указано выше, оценку принятой общей мощности в широкой полосе пропускания (RTWP) первой ветви приемника, и выход 63C представляет собой оценку принятой общей мощности в широкой полосе пропускания (RTWP) второй ветви приемника. Оценка 62A мощности и среднеквадратичное отклонение 62B представляют во второй блок 52A, ассоциированный с первой ветвью приемника. Оценку 62C мощности и среднеквадратичное отклонение 62D подают во второй блок 52B, ассоциированный со второй ветвью приемника. Каждый из вторых блоков 52A и 52B выполняет функции, как описано со ссылкой на фиг.4.
Таким же образом, каждый из вторых блоков 52A и 52B выводит соответствующие экстремальные значения 64A, 64B количественных значений мощности, ассоциированных с оценками 62A и 62C мощности соответственно, то есть приблизительное значение минимального уровня шумов. В данном варианте осуществления эти экстремальные значения 64A, 64B предоставляют в соответствующие третьи блоки 53A и 53B. Третьи блоки 53A и 53B также принимают соответствующую оценку 63A и 63C RTWP и ассоциированные среднеквадратичные отклонения 63B и 63D. Третьи блоки 53A и 53B используют эти входы для предоставления соответствующей меры 65A и 65B роста шумов. Однако работа третьих блоков 53A и 53B находится за пределами основного объема настоящего изобретения.
Можно отметить, что блоки 52A, B работают отдельно, то есть каждый из них работает одинаково, так же, как и компоновка, показанная на фиг.4. Однако первый блок 51 представляет собой общий блок, где в настоящем варианте осуществления расширенный фильтр Калмана охватывает все входные измерения и разработан для моделирования также остающихся корреляций между различными ветвями приемника.
На фиг.7 только результаты измерения RTWP обозначены как входы в первый блок 51. Однако другие относящиеся к мощности измерения и информацию также можно использовать для получения лучшей оценки количественного значения мощности, соответствующего сумме соседних значений мощности взаимных помех WCDMA, мощности взаимной помехи не-WCDMA, находящейся в полосе и мощности минимального уровня тепловых шумов. Это в свою очередь улучшает оценку минимального уровня шумов. Таким образом, становится возможным использовать, например, входы, такие, как показаны на фиг.4, но для обеих ветвей приемника. Другая альтернатива состоит в использовании дополнительных результатов измерения принятой планируемой расширенной мощности восходящей линии связи передачи данных, RSEPS, как входных данных для блока оценки. Оценку количественного значения мощности, предоставляемую во вторые блоки 52A и 52B, затем, предпочтительно, можно сопоставить с различиями между RTWP и RSEPS для каждой ветви приемника. Затем, предпочтительно, должны быть определены варианты обработки нелинейных измерений. Моделирование динамик мощности также, предпочтительно, увеличивают для общей динамики по сравнению с моделированием, в котором используются случайные блуждания, эксплуатировавшимся ранее. Адаптивная спектральная оценка включена во входные каскады приемника для оценки такой общей динамики.
В альтернативном варианте осуществления можно использовать общее значение RSEPS для всех ветвей приемника. Такое общее значение RSEPS может состоять, например, из RSEPS в одной из ветвей, среднего значения для всех ветвей или может зависеть, по меньшей мере, от значения одной ветви RSEPS в соответствии с некоторым другим соотношением. Общее значение RSEPS можно затем использовать для оценки количественных значений мощности для различных ветвей приемника.
Вариант выполнения моделирования общего пространства состояний будет описан ниже. Формируют объединенную блочную модель пространства состояний. Обобщенная модель пространства состояния, то есть используемая для описания мощности каждой из ячеек, с использованием блока оценки повышения уровня шумов может быть представлена следующим образом:
 (3)
(3)
Здесь x (t) представляет собой вектор состояния, состоящий из различных состояний мощности, соответствующих определенной ячейке. В частности, x (t) содержит один блок состояний мощности для каждой ветви приемника. y (t) представляет собой выходной вектор, состоящий из результатов измерений мощности, выполненных в одной ячейке (например, общей принятой мощности в широкой полосе пропускания, RTWP). Также y (t) содержит один блок результатов измерения для каждой ветви приемника. w (t) представляет собой, так называемые, системные шумы, которые представляют ошибку модели, и e (t) обозначает ошибку измерения. Все эти количественные значения измерений содержат один блок для каждой ветви приемника. а ( x (t)) описывает возможные нелинейные, динамические моды, в то время как вектор e( x (t)) представляет собой, возможно, нелинейный вектор измерения, который представляет собой функцию состояний системы. И, наконец, t представляет время, и T представляет период выборки. В дальнейшем будут введены специализации для количественного определения подробных аспектов вариантов выполнения текущего изобретения.
Должны быть определены состояния и блоки ветвей приемника. Переменные выбранных состояний определяют так, чтобы они соответствовали количественным значениям мощности ячейки. Подробный вариант выполнения, в котором доступны как результаты измерений RTWP, так и RSEPS, описан в Приложении A. Свойства корреляции между ветвями приемника, например, в отношении пространственного эффекта и эффекта корреляции поляризации должны быть включены в этот вариант выполнения. Алгоритм оценки содержит предпочтительно корреляцию моделирования ковариантности шумов объединенной системы между различными ветвями приемника. Ковариантность шумов объединенной системы содержит более предпочтительно, по меньшей мере, одну из ковариантности пространственного разнесения и ковариантности разнесения по поляризации. Это также представлено в качестве примера в Приложении A.
Следующий этап состоит в описании второго уравнения (3), то есть доступных альтернативных результатов измерения. Выбранные функции измерения соответствуют, по меньшей мере, количественным значениям, представляющим измеренную принятую общую мощность в широкой полосе пропускания в первой и второй ветвях приемника. Возможны различные альтернативные результаты измерений, основанные как на измерениях RTWP, так и на измерениях RSEPS, из которых одно более подробно описано в Приложении B.
Как также отмечено выше, способ также может быть основан на измерениях мощности в более общем смысле. С целью оценки нагрузки мощность кода каждого канала собственной ячейки можно использовать за счет фильтра Калмана с очень высоким порядком. Обработка, предложенная в WO 2007/024166, и уменьшение сложности в соответствии с WO2007/055626, могут быть обобщены в раскрытии настоящего изобретения, как кратко описано здесь ниже.
Блок состояний RSEPS, для каждой ветви приемника, заменяют блоками мощности кода, один блок на каждый канал ячейки. Каждый блок состояния мощности кода имеет свое собственное моделирование ковариантности динамических и системных шумов. Уравнения результатов измерения RSEPS для каждой ветви приемника заменяют одним измерением мощности кода для каждого канала собственной ячейки. Альтернативное моделирование, представленное в Приложении B, может потребовать дополнений для охвата, например, определений измерения SIR, по которому могут быть получены значения мощности кода. Подробности здесь не включены.
Обработка, приведенная в Приложениях A и B, была основана на выборе RSEPS и остаточных уровней мощности, качестве "основных" состояний. Однако выбор состояния фактически происходит произвольно, единственный значимый момент состоит в том, что были последовательно определены уравнения динамики измерений в соответствии с уравнением (3). Это дополнительно описано в Приложении C.
Все количественные величины теперь были переопределены, и расширенный фильтр Калмана можно применять с любой комбинацией модели состояния и модели измерения в соответствии с приложениями A, B и C. Общий расширенный фильтр Калмана представлен в Приложении D.
Компоновка для наблюдения за неисправностями в цепи принимаемого сигнала для беспроводной связи содержит, в основном, две части. Первая часть используется для предоставления полезных данных, то есть средство для предоставления данных, представляющих измеренную принимаемую мощность в цепи принимаемого сигнала в множество моментов времени. Вторая часть используется при обработке этих данных для получения информации о возникновении любой неисправности. Эту вторую часть типично выполняют с помощью компоновки процессора. Такая компоновка процессора представляет собой один вариант выполнения с одним процессором в одном узле системы передачи данных. Однако в другом варианте осуществления компоновка процессора представляет собой распределенную компоновку, содержащую части более чем одного процессора. Различные процессоры даже могут быть физически расположены в разных местах в системе передачи данных или в любой сети, подключенной к ней.
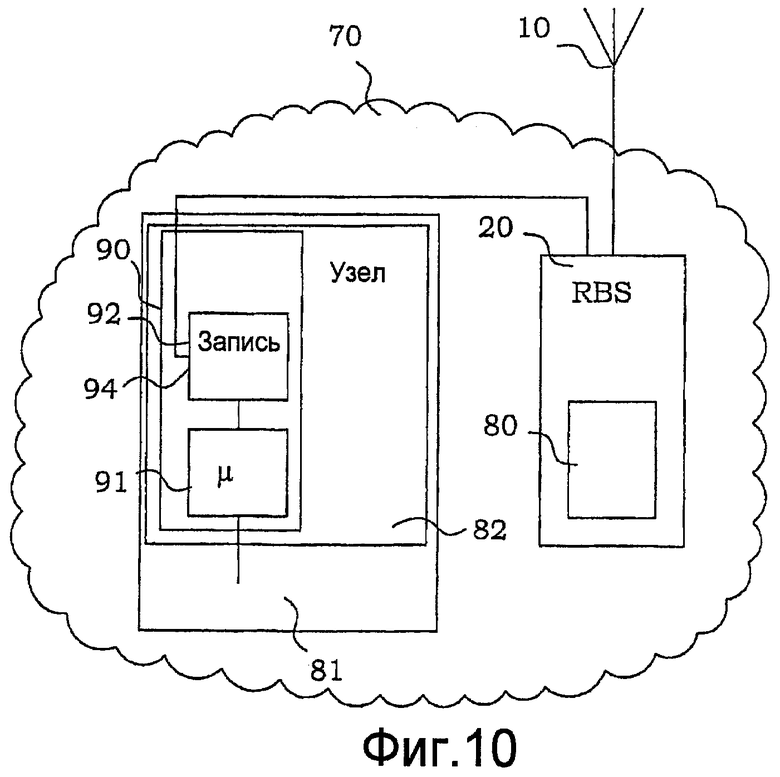
На фиг.8 схематично представлена блок-схема одного варианта осуществления системы 70 беспроводной связи, содержащей компоновку 90 для наблюдения за неисправностями в цепи принимаемого сигнала. В данном варианте осуществления компоновка 90 для наблюдения за неисправностями в цепи принимаемого сигнала состоит из узла, предназначенного для использования в системе 70 беспроводной связи, в данном варианте осуществления базовой радиостанции (RBS) 20. RBS 20 содержит средство 80, предназначенное для обычной работы RBS 20, и соединена, по меньшей мере, с одной антенной 10, и дополнительно соединена с базовой сетью 81 системы 70 беспроводной связи.
Компоновка 90 для наблюдения за неисправностями в цепи принимаемого сигнала содержит средство 92, предназначенное для предоставления данных, представляющих измеренную мощность приема в цепи принимаемого сигнала в множество моментов времени. В настоящем варианте осуществления средство 92 для предоставления данных содержит средство 93 измерения, выполненное с возможностью измерения принимаемой мощности в цепи принимаемого сигнала в множество моментов времени. Компоновка 90 для наблюдения за неисправностями дополнительно содержит компоновку 91 процессора. Компоновка 91 процессора соединена со средством 92 для предоставления данных и выполнена с возможностью работы для наблюдения за неисправностями на основе данных, предоставляемых из средства 92 предоставления данных.
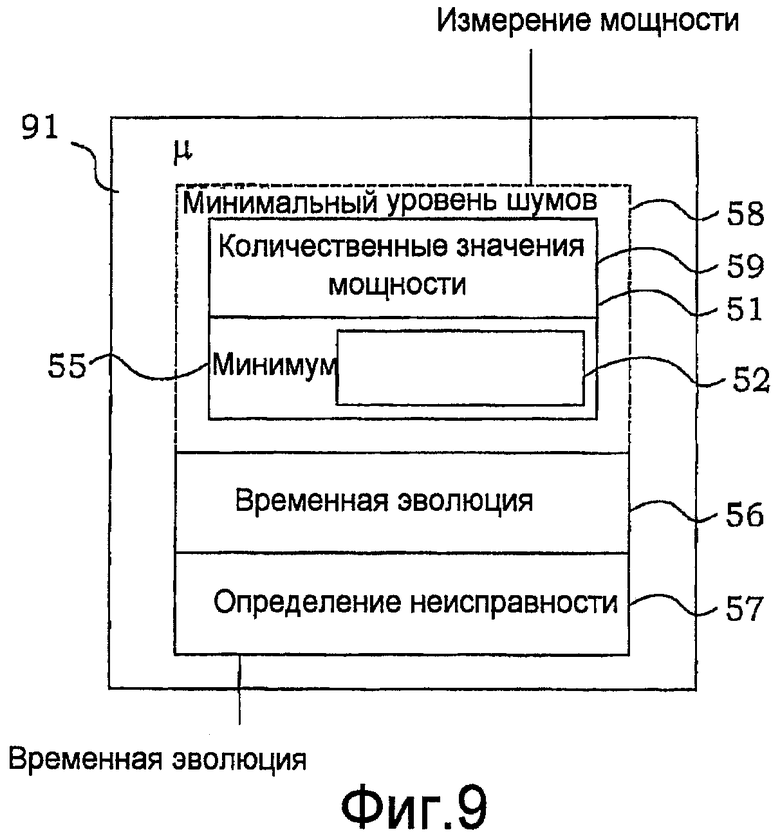
Один вариант выполнения компоновки 91 процессора, используемый, например, в компоновке, показанной на фиг.8, представлен на фиг.9. В данном варианте осуществления компоновка 91 процессора содержит блок 58, выполненный с возможностью определения значения минимального уровня шумов в множество моментов времени, на основе данных, предоставляемых из средства предоставления данных, представляющих измеренную принимаемую мощность в цепи принимаемого сигнала в множество моментов времени (сравни с фиг.8). В настоящем варианте осуществления блок 58 содержит блок 59, выполненный с возможностью получения количественных величин, относящихся к мощности во множестве моментов времени, на основе упомянутых предоставленных данных. В настоящем варианте осуществления этот блок выполнен в соответствии с первым блоком 51, описанным со ссылкой на фиг.4. Если используется разнесение приемника, блок 59, вместо этого, предпочтительно, выполнен в соответствии с первым блоком 51, описанным со ссылкой на фиг.7. Полученные количественные величины, относящиеся к мощности, предоставляют в блок 55 минимального уровня шумов, в котором определяют значение минимального уровня шумов на основе полученных количественных величин, относящихся к мощности. В настоящем варианте осуществления это, в основном, выполняют с использованием второго блока 52 в соответствии с фиг.4 или фиг.7. Подробно операции блоков 51 и 52 представлены при описании со ссылкой на фиг.4 и 7.
Компоновка 91 процессора дополнительно содержит блок 56, соединенный с блоком 58, для оценки временной эволюции заданных значений минимального уровня шумов. Компоновка процессора также содержит блок 57, соединенный с блоком 56, для детектирования любого возникновения неисправности в цепи принимаемого сигнала на основе временной эволюции. Предпочтительно, такое детектирование выполняют путем сравнения временной эволюции с эволюцией модели и указывают неисправность, если измерение, представляющее различие между временной эволюцией и эволюцией модели, превышает пороговое значение. Эволюция в данном конкретном варианте осуществления основана на статистической обработке предыдущих временных эволюций для соответствующих условий. Блок 56, для оценки временной эволюции, выводит сигнал, представляющий детектируемую неисправность или ситуацию отсутствия неисправности. Такой выход может использоваться другими частями системы и/или внешними частями для выполнения соответствующих действий, например, предоставления отчета о какой-либо неисправности для оператора.
В дополнительном варианте осуществления средство 93 измерений выполнено с возможностью измерения принимаемой мощности, по меньшей мере, в двух положениях в цепи принимаемого сигнала в множество моментов времени. Блок 58 соответствующим образом расположен для определения отдельного значения минимального уровня шумов для каждого положения. Блок 57, предназначенный для детектирования любого возникновения неисправности, затем основывает детектирование на основе сравнения между временной эволюцией заданных значений минимального уровня шумов, по меньшей мере, в двух положениях.
На фиг.10 схематично иллюстрируется блок-схема другого варианта осуществления беспроводной системы 70 связи, содержащей компоновку 90 для наблюдения за неисправностями в цепи принимаемого сигнала. В этом варианте осуществления компоновка 90 для наблюдения за неисправностями состоит из узла 82 базовой сети 81 системы 70 беспроводной связи. В настоящем варианте осуществления средство 92 для предоставления данных содержит приемник 94 данных для количественных величин, относящихся к измеренной принятой мощности в цепи принимаемого сигнала в множество моментов времени. Приемник 94 данных, предпочтительно, соединен, непосредственно или опосредованно, с базовой станцией 20, в которой выполняют фактические измерения. Таким образом, наблюдение за неисправностями может быть выполнено дистанционно и, предпочтительно, координированным образом для множества базовых станций.
Варианты осуществления, описанные выше, следует понимать как несколько иллюстративных примеров настоящего изобретения. Для специалистов в данной области техники будет понятно, что различные модификации, комбинации и изменения могут быть выполнены для варианта осуществления, без выхода за пределы объема настоящего изобретения. В частности, решения различных частей в различных вариантах осуществления могут быть скомбинированы в других конфигурациях, когда это технически возможно. Объем настоящего изобретения, однако, определен приложенной формулой изобретения.
Приложение A
Если оба результата измерений RTWP и RSEPS доступны, для получения оценки остаточной мощности в цифровом приемнике, то есть принятая общая мощности в широкой полосе пропускания минус принятая планируемая расширенная мощность восходящей линии связи передачи данных (совместно используемые) для расчета меры минимального уровня шумов, типично вводят модель двух состояний для каждой ветви. Выбор состояний, как обычно, выполняют произвольно. Однако один естественный выбор состоит в использовании одного состояния, которое описывает RSEPS, и одного состояния, которое описывает "остальную" мощность, которая здесь обозначает остаточную мощность. В случае, когда цель ограничена исключительно оценкой меры минимального уровня шумов, становится возможным использовать модель с одним состоянием.
Отмечая, что эти состояния описывают значения мощности и поэтому обязательно должны быть положительными, необходимо включить отличное от нуля среднее значение. Такие средние значения моделируют как компоненты "случайных блужданий". Предполагается, что любые измерения мощности, определенные логарифмически, используя, например, шкалу дБм, были преобразованы в линейную область мощности перед обработкой. Для выбора состояний, соответствующих настоящему примеру, это приводит к следующим определениям состояний:
 (А1)
(А1)
 (A2)
(A2)
 (A3)
(A3)
 (A4)
(A4)
Здесь А3 относится к (3). х RSEPSPower,i(t) обозначает состояние, соответствующее принятой мощности расширенного восходящей линии связи передачи данных ветви i приемника, то есть измеренное как логарифмический дробный количественный показатель RSEPS, x RSEPSPower,i D ynamics.i(t) обозначает переменные состояния мощности, которые используют для моделирования динамики мощности, выраженной количественными показателями RSEPS для ветви i приемника. Такие динамики описаны матрицами A 1 RSEPSPower,i(t) и A 2 RSEPSPower,i(t), где вариацию времени вводят, в основном, для обеспечения возможности ввода обработки адаптивного спектрального анализа с переменной времени, как описано ниже. Количественное значение w RSEPSPower,i (t) представляет собой шум обработки (то есть ошибку стохастического моделирования) мощности ветви i приема, в соответствии с дробным количественным значением RSEPS. Для количественных значений используют те же обозначения, которые описывают остаточную мощность.
В этот момент следует подчеркнуть, что количественные значения, которые требуется подать на последующие этапы оценки минимального уровня мощности шумов (в каждое из ветви приемника) задают c помощью оценки x Residual,i (t), i=1,..., N Branches , и соответствующей оценке переменной (см. ниже). Конечный результат такого подблока представляет статическую модель
 (A5)
(A5)
где матрица A (t) системы задана как

(A6)
Следует отметить, что (A6) представляет собой частный случай первого уравнения (3), поскольку (а(x(t)))=A(t)x(t).
Остается определить статистические свойства шумов обработки. Эти количественные значения моделируют как белые Гауссовы вероятностные процессы с нулевым средним значением. По сравнению с предшествующим уровнем техники вводят корреляцию между значениями мощности одной ветви приемника, а также между значениями мощности различных ветвей приемника, используя ковариационную матрицу шумов системы. Это ситуация, которую можно ожидать, когда конструируют разнесение приемника, и в некоторых вариантах систем приема MIMO.
В качестве примера возможного варианта осуществления, предполагается, что в каждой ветви приемника выполняется:
(A7)
(A8)

(A9)
Здесь E[.] обозначает математическое ожидание. Следует отметить, что специальный случай без динамики мощности легко можно получить путем удаления соответствующих состояний и блоков матрицы.
В результате, ниже описана ковариантность шумов системы для ветви i приемника
(A10)
В описанном выше варианте осуществления вводится корреляция между состояниями, соответствующими остаточной мощности и мощности RSEPS, в то время как корреляция между мощностью и динамикой остается без влияния, так же как и корреляция между динамикой остаточной мощности и мощностью RSEPS. Конечно, возможны более общие установки, где все элементы корреляции остаются в матрицах. Проблема затем состоит в определении большого количества неизвестных параметров корреляции. Учитывая это, описанное выше предположение выглядит обоснованным, поскольку оно позволяет охватывать, по меньшей мере, корреляцию между значениями мощности в пределах блока матрицы.
Остается смоделировать корреляцию между значениями мощности различных ветвей приемника. Свойства корреляции между ветвями приемника, например, относящиеся к эффектам пространственной корреляции и корреляции поляризации, должны быть включены в модель. Алгоритм оценки, предпочтительно, содержит корреляцию моделирования ковариантности объединенных системных шумов между различными ветвями приемника. Ковариантность объединенных системных шумов содержит, более предпочтительно, по меньшей мере, одно из ковариантности пространственного разнесения и ковариантности разнесения за счет поляризации. Учитывая типичный вариант выполнения с антенной решеткой, в которой ветви приемника распределены равномерно, с соответствующими цепями сигнала приемника, есть основание предположить, что корреляции между произвольным принятым стационарно сигналом мощности
(A11)
в антенной решетке с множеством разнесенных приемных ветвей в приемнике определяются следующим образом:
(A12)
Здесь ρ обозначает корреляцию между шумами мощности системы между соседними ветвями приемника. x True Received (t) обозначает "действительный" (условное среднее) принятый сигнал. Матрица D Received среднеквадратичного отклонения определяется следующим образом:
(13)
Следует отметить, что возможны более общие предположения. Однако модель (А12) обычно используют в предшествующем уровне техники при описании пространственного разнесения.
Когда доступно разнесение на основе поляризации, применяют другие модели. В таком случае можно предположить, что корреляция между соседними элементами антенны с различной ортогональной поляризацией мала, в то время как корреляция соответствует уравнению (A12) для элементов антенны с одинаковой поляризацией. Неортогональную поляризацию, конечно, можно применять в случае, когда количество элементов антенны превышает 2. В качестве примера, предполагая разнесение на основе ортогональной поляризации, с остаточной ошибкой поляризации, корреляция η каждого второго элемента антенны определяет

(A14)
при условии, что N Branch представляет четное число. Аналогичное выражение справедливо для нечетного случая.
Здесь используется комбинация корреляции между ветвями приемника и матрицей ковариантности системных шумов одной ветви приемника. При комбинировании становится понятным, что каждый из элементов (А12), (А14) (и другие варианты матрицы корреляции) влияет на все соответствующие состояния ветви приемника. Это означает, что может быть получена следующая формула матрицы блока из (A4), (A7)-(А10) и, например, (14)
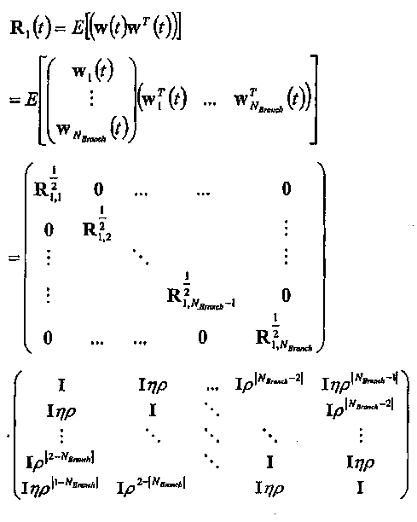
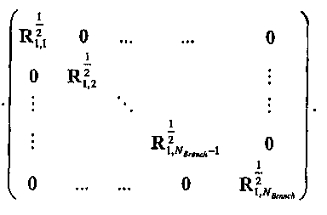
(A15)
На этом заканчивается описание первого уравнения (3), применяемого для MIMO/разнесения оценки нагрузки приемника и/или калибровки.
Следует отметить, что существует множество вариантов описанной выше темы - детали зависят от конфигурации антенны и технологии передачи (например, разнесение по поляризации).
Приложение B
Измерение уровней мощности и моделирование ковариантностей результатов измерений описаны ниже для одной ветви приемника. Причина этого состоит в том, чтобы не усложнять описание обработки ненужными деталями, в случае, когда происходит обсуждение альтернативных вариантов измерения. Ситуация для множества ветвей описана дополнительно ниже, когда будут доступны соответствующие альтернативы измерения.
В варианте осуществления, в котором используются как измерения RTWP, так и измерения RSEPS, множество ветвей приемника используют, как вариант выполнения модели. Предполагается, что принятая общая мощность в широкой полосе пропускания (RTWP(t)) и принятая планируемая расширенная мощность восходящей линии связи передачи данных (RSEPS(t)) определены в соответствии с определениями 3GPP, выпуск 7. Помимо этого, могут быть выполнены собственные измерения немедленно после или даже перед аналогово-цифровым преобразованием.
Учитывая, что измерение RSEPS типично выражено как дробь измерения RTWP, которое определено для совместных измерений (определены точно в одном интервале времени), становится понятным, что уравнение измерений становится нелинейным. Для каждой ветви i:

(B1)
Здесь X RSEPSPower,i (t) обозначает истинную мощность для количественного значения RSEPS в ветви i, e RSEPSPower,i (t) обозначает соответствующую неопределенность измерения и q RSEPS(.) представляет собой функцию квантования измерения RSEPS. Измерения RTWP определены аналогичным образом,

(B2)
где RTWP измеряют в дБм и где все переменные состояния мощности выражены в ваттах. Пояснения аналогичны измерениям RSEPS. Предполагается, что возмущения при измерениях имеют средние значения, имеют Гауссову зависимость и являются белыми, при этом

(B3)
(B4)
Квантование обычно выбирают достаточно мелким, чтобы можно было им пренебречь. Здесь предполагается, что квантованием пренебрегают.
В настоящем варианте осуществления предполагается выполнение логарифмических относительных измерений RSEPS. Первоначальное определение (B1) сохраняется, при этом пренебрегают эффектом квантования. В результате получают расширение ряда Тейлора

(B5)
где

(B6)
Здесь RTWPi powermeasurement (t) и RSEPS i powermeasurement (t) представляют собой искусственные измерения мощности в ваттах, в результате чего (B2) и (B5) решают для переменных состояния. Аналогичная обработка (B2) приводит к получению

(B7)
где

(B8)
Кроме того, перекрестная связь становится

(B9)
Модель нелинейного измерения со ссылкой на (3) определяется следующим образом:
(B10)
(B11)
(B12)


(B13)

(B14)
Использование логарифмических относительных измерений RTWP и RSEPS в настоящем варианте осуществления представляет собой только одну из множества разных альтернатив. Возможно множество других вариантов, например, использование только измерения RTWP, отдельных или логарифмических относительных измерений. Также возможны другие альтернативные взаимосвязи между измерениями RSEPS и RTWP, например, раздельные линейные измерения или относительные линейные измерения. Приведенные выше уравнения в таком случае потребуется соответствующим образом отрегулировать.
Приложение C
Для описания процедуры определения динамики и уравнений измерения, предположим для простоты, что динамика не включена в модель состояния. Определим новые состояния следующим образом:
(C1)
Здесь

(C2)
представляет собой невырожденную матрицу. Следует отметить, что когда такая матрица была определена, состояния

(C3)
используются в модели состояний фильтра Калмана. Новые уравнения измерений формируют в соответствии с альтернативами, описанными выше, путем вставки отношения
(C4)
В уравнениях измерений следуют той же процедуре, как описана выше, с использованием расширения ряда Тейлора, с последующим получением остальных величин, требуемых для обработки с помощью расширенного фильтра Калмана. Ниже представлены важные специальные случаи
(C5)
(C6)
Приложение D
Общий расширенный фильтр Калмана задан следующей матрицей и итерациями векторов
(D1)
Величины, введенные итерациями (D1) фильтра, представляют собой следующие:  (t\t-T) обозначает прогнозирование основания на основе данных до момента времени t-T,
(t/t) обозначает обновление фильтра на основе данных, вплоть до момента времени t, P
(t|t-T) указывают ковариационную матрицу прогнозирования состояния на основе данных вплоть до момента времени t-T, и
P
(t|t) обозначает ковариационную матрицу обновления фильтра, на основе данных вплоть до момента времени t. C(t) обозначает линеаризованную матрицу измерений (линеаризация вокруг наиболее частого прогнозирования состояния),
K
f(t) обозначает матрицу переменного коэффициента усиления Калмана,
R
2
(t) обозначает ковариационную матрицу измерения, и
R
1(t) обозначают ковариационную матрицу шумов системы. Можно отметить, что
R
1
(t) и
R
2(t) часто используют как переменные настройки фильтра. В принципе, полосой пропускания фильтра управляют по отношению матриц
R
1(t) и
R
2(t).
(t\t-T) обозначает прогнозирование основания на основе данных до момента времени t-T,
(t/t) обозначает обновление фильтра на основе данных, вплоть до момента времени t, P
(t|t-T) указывают ковариационную матрицу прогнозирования состояния на основе данных вплоть до момента времени t-T, и
P
(t|t) обозначает ковариационную матрицу обновления фильтра, на основе данных вплоть до момента времени t. C(t) обозначает линеаризованную матрицу измерений (линеаризация вокруг наиболее частого прогнозирования состояния),
K
f(t) обозначает матрицу переменного коэффициента усиления Калмана,
R
2
(t) обозначает ковариационную матрицу измерения, и
R
1(t) обозначают ковариационную матрицу шумов системы. Можно отметить, что
R
1
(t) и
R
2(t) часто используют как переменные настройки фильтра. В принципе, полосой пропускания фильтра управляют по отношению матриц
R
1(t) и
R
2(t).
Фильтр инициируют, представляя исходные значения для (t|t-T) и P(t|t-T). Следует отметить, что суммарная мощность pdf каждой ветви приемника, которая требуется на конечном этапе оценки RoT (превышение над уровнем тепловых шумов) алгоритмов оценки нагрузки, получают из ожидаемого значения выхода, соответствующего измерению RTWP, а также ожидаемой ковариантности выхода, соответствующей измерению RTWP. Это справедливо, поскольку можно предположить приблизительную Гауссову зависимость. Используя выбор состояния, указанный выше, с состояниями для остаточной мощности и мощности RSEPS можно получить следующее:

(D2)
Из которого следует, что

(D3)
(D4).



Изобретение относится к беспроводной связи. Заявленный способ наблюдения за неисправностями в цепи приема сигнала в беспроводной связи содержит этапы, на которых предоставляют (210) данные, представляющие измеренные значения принятой мощности в цепи принимаемого сигнала в некоторое количество моментов времени. Способ дополнительно содержит определение (220) значения минимального уровня шумов в некоторое количество моментов времени на основе данных, представляющих измеренные принятые значения мощности. Временную эволюцию определенных значений минимального уровня шумов регистрируют (230), и любое возникновение неисправности в цепи принимаемого сигнала детектируют (240) на основе зарегистрированной временной эволюции. Также представлено устройство для наблюдения за неисправностями в цепи приема сигнала. Техническим результатом является создание улучшенных способа и устройства для детектирования неисправностей в цепи приема сигнала и которые не влияют отрицательно на качество графика или пропускную способность при передаче данных. 4 н. и 25 з.п. ф-лы. 11 ил.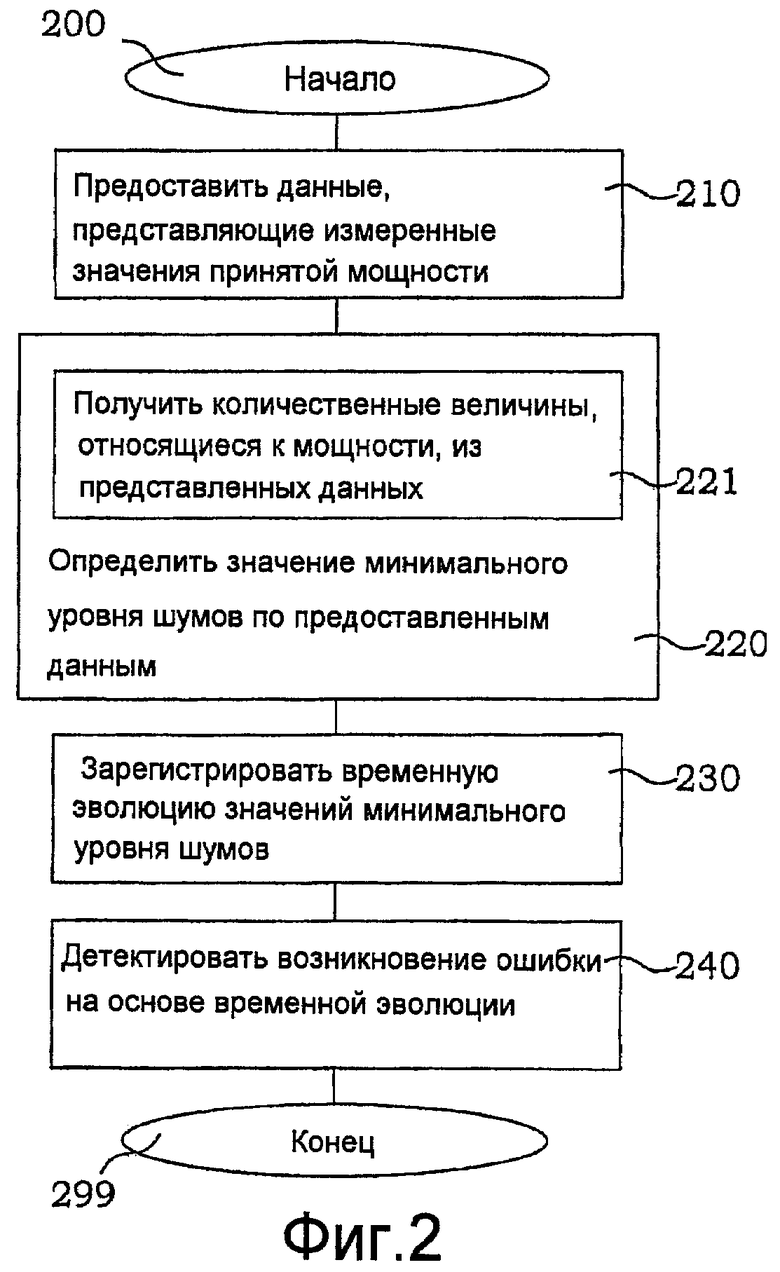
1. Способ наблюдения за неисправностями в цепи (15) приема сигнала в системе беспроводной связи, содержащий следующие этапы:
- предоставляют (210) данные, представляющие измеренные принимаемые значения мощности в упомянутой цепи (15) приема сигнала в некотором количестве моментов времени;
- определяют (220) значение минимального уровня шумов в некотором количестве моментов времени на основе упомянутых предоставляемых данных;
- регистрируют (230) временную эволюцию (101; 103; 104) упомянутых определенных значений минимального уровня шумов; и
- детектируют (240) любое возникновение неисправности в упомянутой цепи (15) приема сигнала на основе упомянутой зарегистрированной временной эволюции (101; 103; 104).
2. Способ по п.1, в котором упомянутый этап определения (220) значения минимального уровня шумов дополнительно содержит этап получения (221) количественных величин, относящихся к мощности, в некотором количестве моментов времени на основе упомянутых предоставленных данных, в результате чего упомянутое определение (220) значения минимального уровня шумов основано на упомянутых получаемых количественных величинах, относящихся к мощности.
3. Способ по п.1, в котором упомянутый этап детектирования (240) содержит этапы, на которых сравнивают упомянутую зарегистрированную временную эволюцию с моделью временной эволюции (102) и указывают неисправность, если измерение, представляющее различие между упомянутой зарегистрированной временной эволюцией (101; 103; 104) и упомянутой моделью временной эволюции (102), превышает пороговое значение.
4. Способ по п.3, в котором упомянутая модель временной эволюции (102) основана на статистической обработке предыдущих зарегистрированных временных эволюций (101; 103; 104) для аналогичных условий.
5. Способ по п.1, в котором:
- упомянутые предоставленные данные представляют измеренные принятые величины мощности, по меньшей мере, в двух положениях (12А-Е) в цепи (15) приема сигнала;
- упомянутый этап определения содержит определение отдельных значений минимального уровня шумов для упомянутых, по меньшей мере, двух положений (12А-Е); и
- упомянутый этап детектирования (240) основан на сравнении между упомянутыми зарегистрированными временными эволюциями (103, 104) упомянутых определенных значений минимального уровня шумов для упомянутых, по меньшей мере, двух положений (12А-Е).
6. Способ по любому из пп.1-5, в котором упомянутый этап предоставления (210) данных содержит прием данных, представляющих измеренную принятую мощность в упомянутой цепи (15) приема сигнала в некотором количестве моментов времени.
7. Способ по любому из пп.1-5, в котором упомянутый этап предоставления (210) данных содержит измерение принятой мощности в упомянутой цепи (15) приема сигнала в некотором количестве моментов времени.
8. Способ по любому из пп.1-5, в котором упомянутые количественные величины, относящиеся к мощности, получают на основе данных, представляющих, по меньшей мере, два разных типа принимаемой мощности.
9. Способ по п.8, в котором один из упомянутых, по меньшей мере, двух разных типов принимаемой мощности представляет собой принятую общую мощность в широкой полосе.
10. Способ по п.9, в котором упомянутый этап определения (220) содержит определение минимального значения упомянутых количественных величин, относящихся к мощности, в пределах периода времени.
11. Способ по п.1, в котором:
- упомянутый этап определения (220) содержит оценку распределений вероятности для количественных значений мощности на основе упомянутых предоставляемых принятых значений мощности; и
- вычисляют распределение условной вероятности измерения минимального уровня шумов на основе, по меньшей мере, некоторого количества упомянутых оцененных распределений вероятности для упомянутого количественного значения мощности.
12. Способ по любому из пп.1-5, 9-11, в котором:
- в упомянутой системе (70) беспроводной связи предусмотрено разнесение приемника, и упомянутая цепь (15) приема сигнала содержит, по меньшей мере, две ветви приемника;
- упомянутый этап определения (220) содержит определение отдельных значений минимального уровня шумов для упомянутых, по меньшей мере, двух ветвей приемника; и
- упомянутый этап детектирования (240) основан на сравнении между упомянутыми временными эволюциями упомянутых определенных значений минимального уровня шумов упомянутых, по меньшей мере, двух ветвей приемника.
13. Способ по п.12, в котором:
- упомянутый этап предоставления (210) содержит предоставление данных измерений принятой общей мощности в широкой полосе для, по меньшей мере, первой ветви приемника и второй ветви приемника в множество моментов времени;
- упомянутый этап определения (220) содержит оценку множество раз распределения вероятности для первого количественного значения мощности и второго количественного значения мощности, причем оба они связаны с выбранными переменными состояния алгоритма оценки, по количественным значениям, представляющим упомянутую измеренную принятую общую мощность в широкой полосе упомянутой первой ветви приемника, а также упомянутой второй ветви приемника, используя выбранные функции измерения упомянутых выбранных переменных состояния упомянутого алгоритма оценки;
- упомянутые выбранные переменные состояния соответствуют количественным значениям мощности ячейки;
- упомянутые выбранные функции измерения соответствуют упомянутым количественным значениям, представляющим упомянутую измеренную принятую общую мощность в широкой полосе упомянутых первой и второй ветвей приемника;
- упомянутый этап определения (220) дополнительно содержит этапы, на которых:
- рассчитывают распределение условной вероятности первого измерения минимального уровня шумов на основе, по меньшей мере, некоторого количества упомянутых оцененных распределений вероятности для упомянутого первого количественного значения мощности и распределение условной вероятности второго измерения минимального уровня шумов на основе, по меньшей мере, некоторого количества упомянутых оцененных распределений вероятности для упомянутого второго количественного значения мощности; и
- предоставляют упомянутое значение минимального уровня шумов на основе упомянутых рассчитанных распределений условной вероятности упомянутого первого и второго измерений минимального уровня шумов.
14. Устройство для наблюдения за неисправностями в цепи (15) приема сигнала системы (70) беспроводной связи, содержащее:
- средство (92) для предоставления данных, представляющих измеренную принятую мощность в упомянутой цепи (15) приема сигнала в некотором количестве моментов времени; и
- процессор;
- причем упомянутый процессор выполнен с возможностью определения значения минимального уровня шумов в некотором количестве моментов времени на основе упомянутых предоставляемых данных;
- упомянутый процессор дополнительно выполнен с возможностью оценки временной эволюции (101; 103; 104) упомянутых определенных значений минимального уровня шумов; и
- упомянутый процессор дополнительно выполнен с возможностью детектирования любого возникновения неисправности в упомянутой цепи приема сигнала на основе упомянутой временной эволюции (101; 103; 104).
15. Устройство по п.14, в котором упомянутый процессор дополнительно выполнен с возможностью получения количественных величин, относящихся к мощности, в некоторое количество моментов времени на основе упомянутых предоставляемых данных, при этом упомянутое значение минимального уровня шумов основано на упомянутых количественных величинах, относящихся к мощности.
16. Устройство по п.14, в котором упомянутый процессор дополнительно выполнен с возможностью сравнения упомянутой временной эволюции (101; 103; 104) с моделью эволюции (102) и указания неисправности, если измерение, представляющее различие между упомянутой временной эволюцией (101; 103; 104) и упомянутой моделью эволюции (102), превышает пороговое значение.
17. Устройство по п.16, в котором упомянутая модель (102) эволюции основана на статистической обработке предыдущих временных эволюций (101; 103; 104) для соответствующих условий.
18. Устройство по п.14, в котором:
- упомянутые предоставленные данные относятся к принятым значениям мощности, по меньшей мере, в двух положениях (12А-Е) в цепи (15) приема сигнала;
- упомянутый процессор дополнительно выполнен с возможностью определения отдельных значений минимального уровня шумов для упомянутых, по меньшей мере, двух положений (12А-Е); и
- упомянутый процессор дополнительно выполнен с возможностью основывать упомянутое детектирование на сравнении между упомянутой временной эволюцией и упомянутыми определенными значениями минимального уровня шумов в упомянутых, по меньшей мере, двух положениях (12А-Е).
19. Устройство по любому из пп.14-18, в котором упомянутое средство (92) предоставления содержит приемник (94) данных для количественных величин, относящихся к измеренной принятой мощности в упомянутой цепи (15) приема сигнала в некотором количестве моментов времени.
20. Устройство по любому из пп.14-18, в которой упомянутое средство (92) предоставления содержит средство (93) измерения, выполненное с возможностью измерения принятой мощности в упомянутой цепи (15) приема сигнала в некотором количестве моментов времени.
21. Устройство по любому из пп.14-18, в котором упомянутые количественные величины, относящиеся к мощности, получают на основе данных, представляющих, по меньшей мере, два разных типа принимаемых уровней мощности.
22. Устройство по п.21, в котором один из упомянутых, по меньшей мере, двух разных типов принимаемой мощности представляет собой принятую общую мощность в широкой полосе.
23. Устройство по п.22, в которой упомянутый процессор дополнительно выполнен с возможностью определения минимального значения упомянутых количественных величин, относящихся к мощности, в пределах периода времени.
24. Устройство по п.14, в котором:
- упомянутый процессор дополнительно выполнен с возможностью оценки распределений вероятности для количественного значения мощности на основе упомянутых измеренных принятых значений мощности; и
- упомянутый процессор дополнительно выполнен с возможностью расчета распределения условной вероятности измерения минимального уровня шумов на основе, по меньшей мере, некоторого количества упомянутых оцененных распределений вероятности для упомянутого количественного значения мощности.
25. Устройство по любому из пп.14-18, 22-24, в котором:
- в упомянутой системе (70) беспроводной связи предусмотрено разнесение приемника, и упомянутая цепь (15) приема сигнала содержит, по меньшей мере, две ветви приемника;
- причем упомянутые получаемые количественные величины, относящиеся к мощности, относятся к принимаемой мощности в упомянутых, по меньшей мере, двух ветвях приемника;
- упомянутый процессор дополнительно выполнен с возможностью определения отдельных значений минимального уровня шумов для упомянутых, по меньшей мере, двух ветвей приемника; и
- упомянутый процессор дополнительно выполнен с возможностью основывать упомянутое детектирование на сравнении между упомянутыми временными эволюциями упомянутых определенных значений минимального уровня шума упомянутых, по меньшей мере, двух ветвей приемника.
26. Устройство по п.25, в котором:
- упомянутое средство (92) предоставления данных содержит средство предоставления измерений принятой общей мощности в широкой полосе для, по меньшей мере, первой ветви приемника и второй ветви приемника в множество моментов времен;
- упомянутый процессор дополнительно выполнен с возможностью:
- оценки множество раз распределения вероятности для первого количественного значения мощности и второго количественного значения мощности, причем оба они связаны с выбранными переменными состояния алгоритма оценки, по количественным значениям, представляющим упомянутую измеренную принятую общую мощность в широкой полосе упомянутой первой ветви приемника, а также упомянутой второй ветви приемника, используя выбранные функции измерения упомянутых выбранных переменных состояния упомянутого алгоритма оценки;
- упомянутые выбранные переменные состояния соответствуют количественному значению мощности ячейки;
- упомянутые выбранные функции измерения соответствуют упомянутым количественным значениям, представляющим упомянутую измеренную принятую общую мощность в широкой полосе упомянутых первой и второй ветвей приемника;
- причем упомянутый этап определения содержит этапы, на которых:
- рассчитывают распределение условной вероятности первого измерения минимального уровня шумов на основе, по меньшей мере, некоторого количества упомянутых оцененных распределений вероятности для упомянутого первого количественного значения мощности и распределение условной вероятности второго измерения минимального уровня шумов на основе, по меньшей мере, некоторого количества упомянутых оцененных распределений вероятности для упомянутого второго количественного значения мощности; и
- предоставляют упомянутое значение минимального уровня шумов на основе упомянутых рассчитанных распределений условной вероятности упомянутого первого и второго измерений минимального уровня шумов.
27. Устройство узла, предназначенное для использования в системе (70) беспроводной связи, содержащее устройство по любому из пп.14-26.
28. Устройство узла по п.27, причем упомянутое устройство узла представляет собой базовую станцию (20).
29. Система (70) беспроводной связи, содержащая, по меньшей мере, одно устройство узла по п.27 или 28.
| US 2001055952 A1, 27.12.2001 | |||
| СПОСОБ И УСТРОЙСТВО САМОДИАГНОСТИКИ ДЛЯ ОБНАРУЖЕНИЯ НЕИСПРАВНОСТЕЙ ПРИЕМОПЕРЕДАТЧИКА В ПРИЕМНОМ МОДУЛЕ РАДИОСВЯЗИ БАЗОВОЙ ПРИЕМОПЕРЕДАЮЩЕЙ СТАНЦИИ | 1999 |
|
RU2153224C1 |
| WO 2007024166 A1, 01.03.2007 | |||
| WO 2006076969 A1, 27.07.2006 | |||
| Устройство для психофизиологических исследований | 1986 |
|
SU1337050A1 |

