Заявление на приоритет
Эта заявка заявляет приоритет по 35 Конвенции США §119(е) по Предварительной заявке на патент № 60/733,021, названной «Калибровка антенной матрицы для многовходовых многовыходных систем беспроводной связи», поданной 2 ноября 2005, и также заявляет приоритет по 35 Конвенции США §120 по заявке № 11/398,077, названной «Калибровка антенной матрицы для систем беспроводной связи», поданной 4 апреля 2006, обе принадлежащие патентообладателю этой заявки и, таким образом, специально включена сюда в качестве ссылки.
Область техники, к которой относится изобретение
Последующее описание относится в общем к беспроводным передачам и, среди прочего, к калибровке антенной матрицы для многовходовых многовыходных систем беспроводной связи.
Уровень техники
Системы беспроводной связи стали широко распространенными средствами, посредством которых большинство людей во всем мире стали общаться. Устройства беспроводной связи стали меньше и более мощными для удовлетворения нужд потребителей и для улучшения подвижности и удобства. Увеличение мощности обработки в мобильных устройствах, таких как сотовые телефоны, привело к увеличению требований к системам передачи по беспроводным сетям. Такие системы обычно нелегко обновлять, как сотовые устройства, которые связываются посредством них. По мере того как расширяют возможности мобильных устройств, может быть трудным поддерживать старые системы беспроводной связи таким образом, чтобы облегчить полную эксплуатацию новых и улучшенных возможностей беспроводных устройств.
Более конкретно, при частотном разделении обычно разделяют спектр на различные каналы посредством разделения его на одинаковые части полосы частот, например, разделением частотной полосы, выделенной для связи беспроводных сотовых телефонов, может быть разделение на каналы, каждый из которых может нести голосовой диалог или при цифровой услуге нести цифровые данные. Каждый канал может назначаться только одному пользователю за один раз. Одним общеиспользуемым вариантом является метод ортогонального разделения частот, который эффективно разделяет всю полосу пропускания системы на множество ортогональных поддиапазонов. Эти поддиапазоны также называются как тоны, несущие, поднесущие, секции и/или частотные каналы. Каждый поддиапазон ассоциативно связывается с поднесущей, которая может модулироваться данными. При методах временного разделения полоса разделяется по времени на последовательные временные полоски или временные интервалы. Каждый пользователь канала обеспечивается временной полоской для передачи и приема информации по алгоритму кругового обслуживания. Например, в любое определенное время t пользователь обеспечивается доступом к каналу для передачи коротких пакетов. Затем доступ переключается к другим пользователям, которые обеспечиваются короткими интервалами времени для передачи и приема информации. Цикл «поочередности» продолжается и, в конечном счете, каждый пользователь обеспечивается множеством интервалов передачи и приема.
Методы кодового разделения обычно передают данные по числу частот, доступных в любое время в диапазоне. В общем, данные оцифровываются и распределяются по доступной полосе частот, где множество пользователей может быть совмещено на канале и соответствующим пользователям могут назначаться коды уникальных последовательностей. Пользователи могут передавать в одной и той же широкополосной части спектра, где каждый пользовательский сигнал распределяется по всей полосе частот посредством соответствующего уникального кода расширения спектра. Этот метод обеспечивает совместное использование, где один или более пользователей могут одновременно передавать и принимать. Такое совместное использование может достигаться посредством цифровой модуляции спектрального диапазона, где пользовательский поток бит кодируется и распределяется по широкополосному каналу псевдослучайным образом. Приемник распознает связанный уникальный код последовательности и устраняет рандоминизацию для сбора бит для конкретного пользователя когерентным способом.
Известным типом системы связи является многовходовая многовыходная (MIMO) система связи, где передатчик и приемник имеют множество приемных и передающих антенн для связи. Мобильный терминал с множеством приемных и передающих антенн в зоне покрытия базовой станции с множеством приемных и передающих антенн могут быть заняты приемом одного, более чем одного или всех потоков данных от базовой станции. Аналогично, мобильный терминал может передавать данные на базовую станцию или другой мобильный терминал. Такая связь между базовой станцией и мобильным терминалом или между мобильными терминалами может ухудшаться соответственно при канальных изменениях и/или изменениях мощности помех. Например, указанные выше изменения могут влиять на планирование базовой станции, управление мощностью и/или предсказание скорости для одного или более мобильных терминалов.
Когда антенная матрица и/или базовые станции используются в связке с методом передачи по дуплексным во временной области (TDD) каналам, могут достигаться очень большие усиления. Ключевое условие в достижении этих усилений заключается в том, что в соответствии с природой TDD передачи и приема прямой канал (FL) и обратный канал (RL) соблюдают аналогичные физические передающие каналы, соответствующие общей частоте несущей. Однако на практике все передающие и принимающие цепи, которые могут включать в себя аналоговые входные блоки и цифровые эталонные передатчики и приемники, а также физические кабели и антенную архитектуру, вносят вклад в полную канальную характеристику, наблюдаемую приемником. Другими словами, приемник будет видеть полный или эквивалентный канал между входом цифроаналогового преобразователя (DAC) передатчика и выходом аналогового цифрового преобразователя (ADC) приемника, который может содержать аналоговую цепь передатчика, физический канал распространения, структуру физической антенной матрицы (включая кабели) и аналоговую приемную цепь.
В связи с вышеизложенным существует необходимость в уровне техники в системе и/или методологии калибровки антенной матрицы в устройствах беспроводной связи.
Сущность изобретения
Последующее представляет упрощенное краткое изложение одного или более вариантов осуществления для обеспечения основного понимания таких вариантов осуществления. Это краткое изложение не является широким общим представлением всех рассматриваемых вариантов осуществления и предполагается для устанавливающего разъяснения или допускающих элементов всех вариантов осуществления, не ограниченных объемом любого или всех вариантов осуществления. Единственная его цель - представить некоторые концепции одного или более вариантов осуществления в упрощенной форме в качестве прелюдии к более подробному описанию, которое представляется позже.
В соответствии с аспектом способ калибровки антенной матрицы в беспроводной сети содержит определение канальных оценок для по меньшей мере двух антенн по меньшей мере двух терминалов доступа и определение отношения калибровки на основе каждой из канальных оценок для по меньшей мере двух антенн.
Для выполнения вышеупомянутых и связанных целей один или более вариантов осуществления содержит признаки, которые ниже полностью описаны и конкретно указанные в формуле. Последующее описание и приложенные чертежи устанавливают подробно определенные иллюстративные аспекты одного или более вариантов осуществлений. Эти аспекты являются показательными, однако только несколько различных способов, в которых принципы различных вариантов осуществления могут использоваться, и описанные варианты осуществления предполагаются для включения всех таких аспектов и их эквивалентов.
Краткое описание чертежей
Фиг. 1 показывает аспекты системы беспроводной связи с множественным доступом.
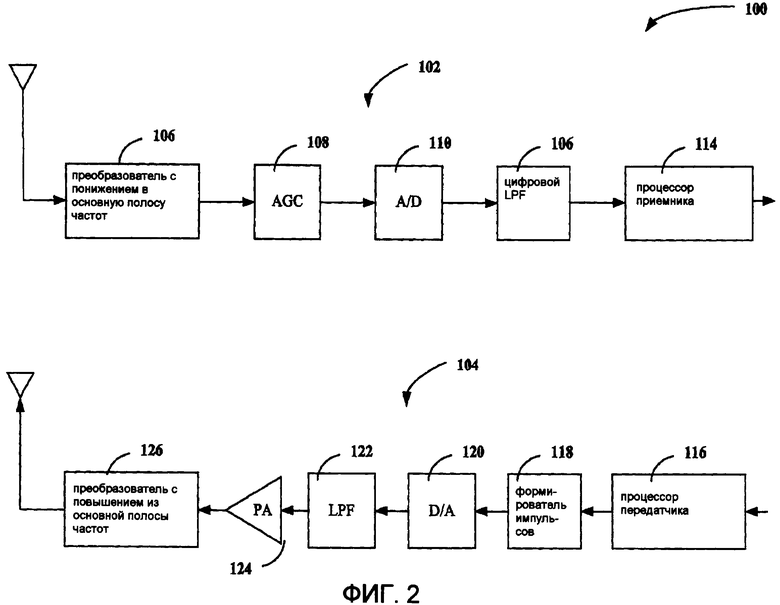
Фиг. 2 - антенную структуру, содержащую приемную цепь и передающую цепь, в соответствии с различными аспектами, описанными здесь.
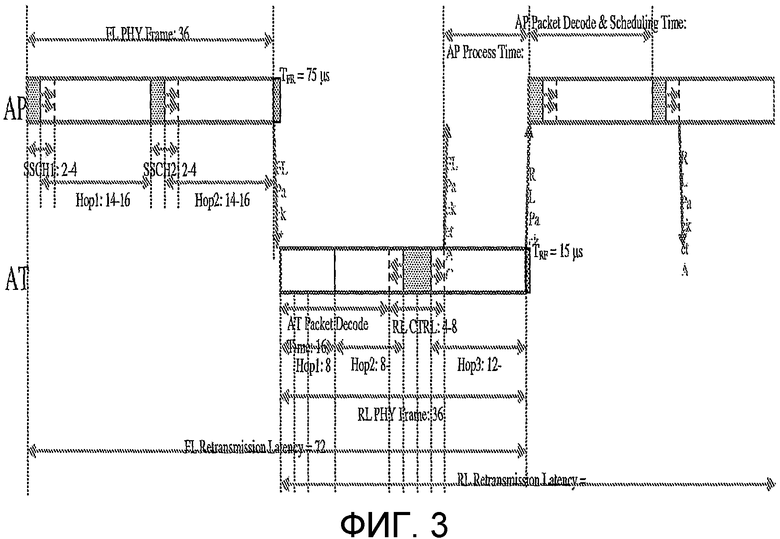
Фиг. 3 - аспекты временной диаграммы для операций калибровки.
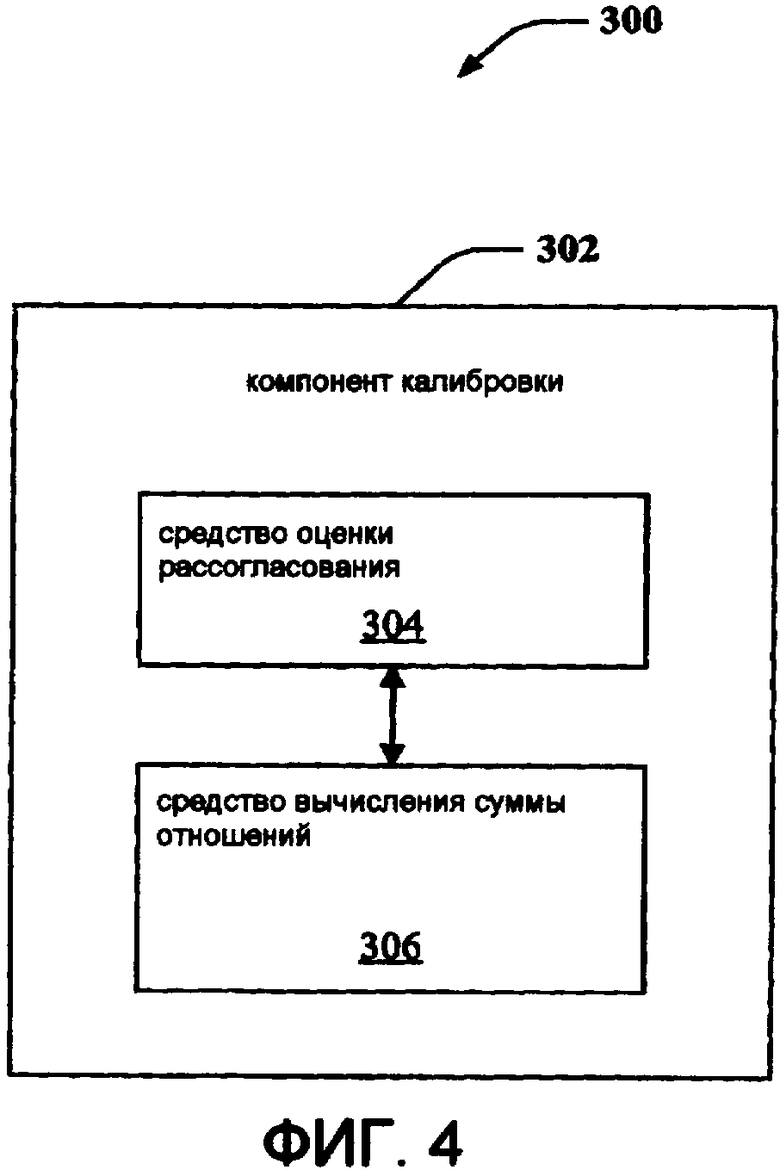
Фиг. 4 - аспекты логики, которая облегчает калибровку антенной матрицы для компенсации рассогласования усиления.
Фиг. 5 - аспекты системы, которые облегчают калибровку антенной матрицы для компенсации рассогласования усиления.
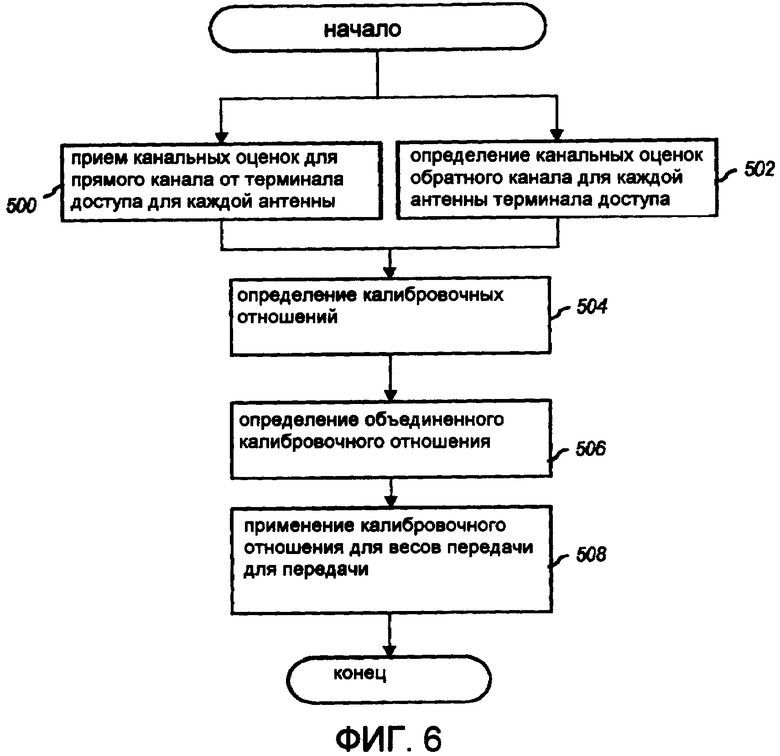
Фиг. 6 - аспекты методологии для калибровки антенной матрицы.
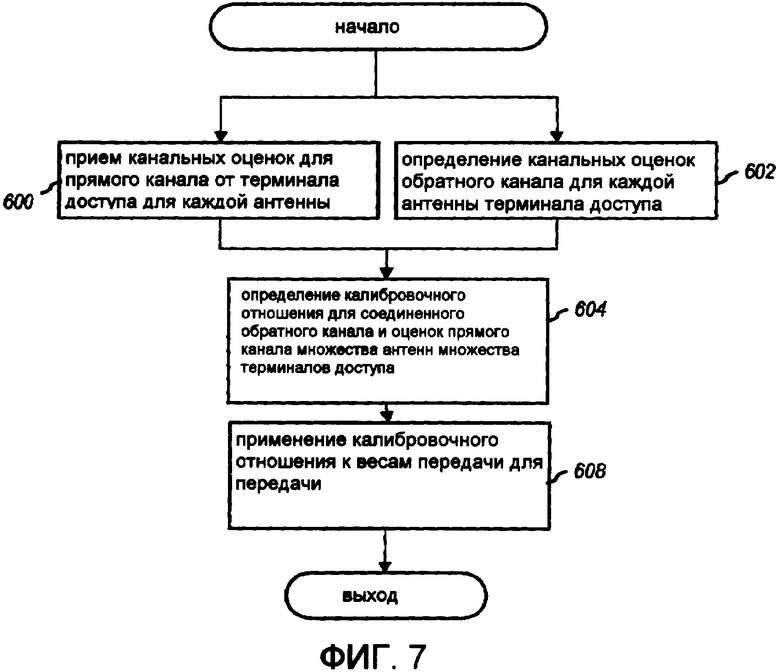
Фиг. 7 - аспекты методологии для калибровки антенной матрицы.
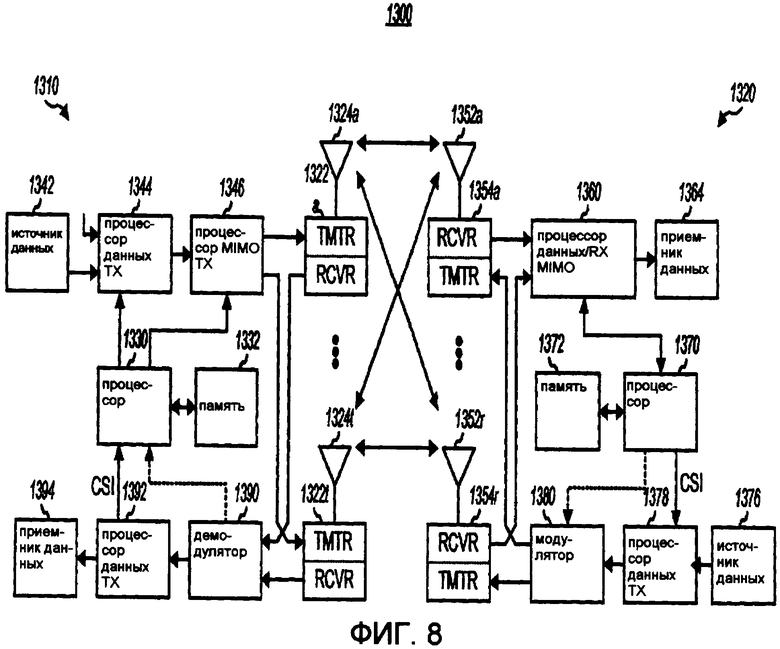
Фиг. 8 - аспекты приемника и передатчика в системе беспроводной связи.
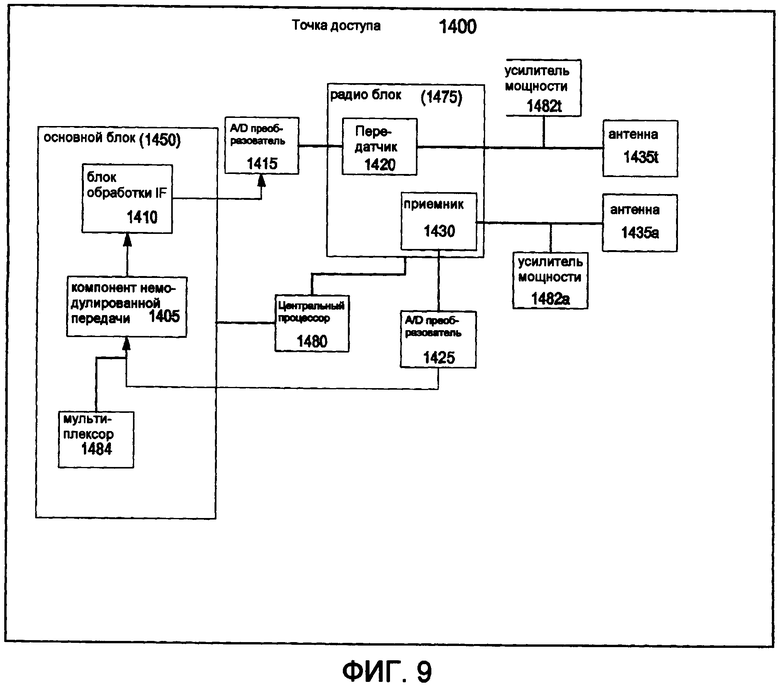
Фиг. 9 - аспекты точки доступа.
Подробное описание
Различные варианты осуществления теперь описываются со ссылкой на чертежи, на которых аналогичные ссылочные цифровые позиции используются для обозначения аналогичных элементов. В последующем описании для целей объяснения различные конкретные подробности изложены для обеспечения полного понимания одного или более вариантов осуществления. Может быть очевидным, однако, что такой вариант(ы) осуществления может применяться без этих конкретных подробностей. В других примерах хорошо известные структуры и устройства показываются в форме блок-схемы для облегчения описания одного или более вариантов осуществления.
Используемые в этой заявке термины «компонент», «система» и аналогичные предполагаются для обозначения компьютерно-реализуемого объекта или аппаратуры, комбинации аппаратуры и программного обеспечения, программного обеспечения или программного обеспечения в исполнении. Например, компонент может быть, но не ограничиваясь этим, процессом, выполняемом на процессоре, процессором, объектом, выполняемой программой, потоком выполнения, программой и/или компьютером. Один или более компонентов могут принадлежать процессу и/или потоку исполнения, и компонент может быть расположен на одном компьютере и/или распределен между двумя или более компьютерами. Также эти компоненты могут выполняться с различных машиночитаемых носителей, имеющих различные структуры данных, сохраненные на них. Компоненты могут связываться посредством локальных и/или удаленных процессов, таких как в соответствии с сигналами, имеющими один или более пакетов данных (например, данные из одного компонента, взаимодействующего с другим компонентом в локальной системе, распределенной системе и/или по сети, такой как Интернет с другими системами, посредством сигнала).
Кроме того, различные варианты осуществления описываются здесь в связке со станцией абонента. Станцией абонента может также называться система, блок абонента, мобильная станция, мобайл, удаленная станция, точка доступа, базовая станция, удаленный терминал, терминал доступа, пользовательский терминал, пользовательский агент, пользовательское оборудование и т.д. Пользовательская станция может быть сотовым телефоном, беспроводным телефоном, телефоном Протокола Инициации Сеанса (SIP), станцией местной радиосвязи (WLL), персональным цифровым секретарем (PDA), карманным устройством, имеющим возможность беспроводной связи, или другим обрабатывающим устройством, соединенным с беспроводным модемом.
Кроме того, различные аспекты или признаки, описанные здесь, могут реализовываться в качестве способа, устройства или изделия производителя, использующего стандартное программирование и/или инженерные методы. Термин «изделие производителя», которое используется здесь, предполагается для охвата компьютерной программы, доступной с любого машиночитаемого устройства, несущей или носителя. Например, машиночитаемый носитель может включать в себя, но не ограничивая, магнитные запоминающие устройства (например, жесткий диск, гибкий диск, магнитные ленты…), оптические диски (например, компакт-диск (CD), цифровой универсальный диск (DVD)…), смарт-карты, флэш-память (например, карты, стек, ключевой накопитель…) и встроенные схемы, такие как постоянные запоминающие устройства, программируемые постоянные запоминающие устройства и электрически стираемые программируемые постоянные запоминающие устройства.
На фиг. 1 показывается система беспроводной связи с множественным доступом в соответствии с одним вариантом осуществления. Система 1 беспроводной связи с множественным доступом включает в себя множество сот, например соты 2, 104 и 106. На фиг. 1 каждая сота 2, 4 и 6 может включать в себя точку доступа, которая включает в себя множество секторов. Множество секторов формируются группами антенн, каждая отвечающая за связь с терминалами доступа в части соты. В соте 2 группы 12, 14 и 16 антенн каждая соответствует различному сектору. В соте 4 группы 18, 20 и 22 антенн каждая соответствует различному сектору. В соте 6 группы 24, 26 и 28 каждая соответствует различному сектору.
Каждая сота включает в себя несколько терминалов доступа, которые связываются с одним или более секторами каждой точки доступа. Например, терминалы 20 и 22 доступа связываются с базой точки доступа 42, терминалы 24 и 26 связываются с точкой доступа 44 и терминалы 28 и 40 связываются с точкой доступа 46.
Контроллер 50 подключен к каждой соте 2, 4 и 6. Контроллер 50 может содержать одно или более соединений с множеством сетей, например с Интернет, или другими сетями на основе пакетной передачи, или голосовыми сетями с коммутируемой схемой, которые обеспечивают информацию на и из терминалов доступа в связи с сотами системы 1 беспроводной связи с множественным доступом. Контроллер 50 включает в себя или подключен к планировщику, который планирует передачу с и на терминалы доступа. В других вариантах осуществления планировщик может располагаться в каждой индивидуальной соте, каждом секторе соты или их комбинации.
Для облегчения калибровки передач на терминалы доступа целесообразно для калибровки калибровочного цикла усиления точки доступа иметь дело с рассогласованиями, соответствующими передающей и принимающей цепям точки доступа. Однако в результате шума в канале любые калибровочные оценки на основе сигналов, принятых в терминалах доступа, прямом канале и переданные с терминалов доступа, обратного канала, могут содержать шум и другие канальные изменения, которые могут ставить под сомнение предоставляемые оценки. Для преодоления эффектов канального шума множество калибровок прямого канала и обратного канала используются для множества терминалов доступа. В определенных аспектах множество передач на и с каждой антенны каждого терминала доступа принимается во внимание для выполнения калибровки данного сектора. В определенных аспектах множество антенн может использоваться для калибровки передачи для единственного терминала доступа. В других аспектах одна или менее чем все антенны для группы терминалов доступа могут использоваться для связи со всеми антеннами для группы терминалов доступа.
В определенных аспектах может калиброваться передающая цепь или принимающая цепь точки доступа. Это может быть сделано, например, использованием калибровочного отношения для калибровки принимающей цепи точки доступа к ее передающей цепи или калибровки ее передающей цепи к ее принимающей цепи.
В случае системы MIMO каждая антенна каждого терминала доступа может интерпретироваться как отдельный терминал доступа для целей определения калибровочного отношения. Затем, когда калибровочные отношения объединяются, каждое отдельное калибровочное отношение или информация калибровки для каждой антенны каждого терминала доступа может использоваться в качестве отдельного компонента.
Как использовано здесь, точкой доступа может быть фиксированная станция, используемая для связи с терминалами, и может также называться и включать в себя некоторые или все функции базовой станции, Узел B или некоторую другую терминологию. Терминал доступа может также называться и включать в себя некоторые или все функции пользовательского оборудования (UE), устройства беспроводной связи, терминала, мобильной станции или некоторую другую терминологию.
Следует отметить, что хотя фиг. 1 показывает физические сектора, т.е. имеющие различные группы антенн для различных секторов, другие подходы могут использоваться. Например, использование множества фиксированных «лучей», каждый из которых охватывает различные области соты в частотной области, может использоваться вместо или в комбинации с физическими секторами. Такой подход показан и описан в находящейся одновременно на рассмотрении заявке на патент № 11/260,895, названной «Адаптивное разбиение на сектора в сотовой системе», которая включена сюда посредством ссылки.
На фиг. 2 структура 100 антенны содержит принимающую цепь 102 и передающую цепь 104 в соответствии с различными аспектами, описанными здесь. Принимающая цепь 102 содержит компонент 106 преобразователя с понижением, который преобразует с понижением сигнал в основную полосу частот при приеме. Компонент 106 преобразователя с понижением оперативно связан с блоком функции 108 автоматической регулировки усиления (AGC), которая определяет интенсивность принятого сигнала и автоматически регулирует усиление, применяемое к принятому сигналу для поддержания принимающей цепи 102 в связанном с ней диапазоне линейных операций и для обеспечения постоянной интенсивности сигнала для вывода через передающую цепь 104. Будет понятно, что AGC 108 может быть опционально для некоторых вариантов осуществления, описанных здесь (например, автоматическая регулировка усиления не требуется в каждом варианте осуществления). AGC 108 оперативно связано с аналого-цифровым (A/D) преобразователем 110, который преобразует принятый сигнал в цифровой формат до того, как сигнал сглаживается цифровым низкочастотным фильтром (LPF) 112, который может ослаблять небольшие колебания в принятом сигнале. В результате принимающая цепь 102 может содержать процессор 114 приемника, который обрабатывает принятый сигнал и может передавать сигнал на один или более компонентов передающей цепи 104.
Передающая цепь 104 может содержать процессор 116 передатчика, который принимает сигнал от принимающей цепи 102 (например, передатчик принимает сигнал, который был изначально принят принимающей цепью 102 и подвергнут различным процессам, связанным с их компонентами …). Процессор 116 передатчика оперативно соединен с импульсным формирователем 118, который может облегчать манипуляцию сигналом, подлежащим передаче, таким образом, что сигнал может формироваться в ограниченной полосе частот, когда он ослабляется и/или устраняется межсимвольная помеха. Единожды сформированный сигнал может подвергаться цифроаналоговому (D/A) преобразованию посредством преобразователя 120 D/A до того, как он подвергается сглаживанию в оперативно связанном низкочастотном фильтре (LPF) 122 в передающей цепи 104. Компонент 124 импульсного усилителя (PA) может усиливать импульс/сигнал до преобразования с повышением немодулированной передачи посредством преобразователя 126 с повышением.
Антенная матрица 100 может существовать для каждой антенны в точке доступа и терминале доступа. Также могут быть заметны различия, наблюдаемые между передаточными характеристиками передающей цепи 102 и принимающей цепи 102 и/или выборками этих целей, взаимосвязь эквивалентного канала и/или изменений в передатчике/приемнике может не учитываться. Когда калибруют матрицу антенн 100, понимание величины изменений влияния на фазу и/или амплитуду сигналов, передаваемых через передающую и принимающую цепи, и их влияние на точность предполагаемой взаимосвязи может использоваться для облегчения процесса калибровки. Кроме того, в случае антенной матрицы обычно каждая антенна 100 имеет разные передающую цепь 104 и принимающую цепь 102, чем каждая другая антенна. Поэтому каждая другая передающая цепь 104 может иметь разные результаты в фазе и/или амплитуде, как и любая другая передающая цепь 104 соответственно. Аналогичное может быть истиной для принимающих цепей 102 каждой антенны 100.
Рассогласования в результатах могут соответствовать физической структуре антенны 100, различиям компонентов или ряду других факторов. Такие рассогласования могут включать в себя, например, влияния взаимного подключения, влияния вышек, знания дефектов местоположений элементов, амплитудные или фазовые рассогласования, соответствующие антенному кабелю, и т.д. Дополнительно рассогласования могут соответствовать аппаратным элементам в передающей цепи 104 и/или принимающей цепи 102 каждой антенны 100. Например, такие рассогласования могут быть связаны с аналоговыми фильтрами, I и Q дисбалансом, фазовым рассогласованием и/или рассогласованием усиления малошумящего усилителя или импульсного усилителя в цепях, различными нелинейными влияниями и т.д.
Для точки доступа для калибровки каждой передающей цепи к ее соответствующей принимающей цепи (т.е. принимающая цепь, соответствующая одной и той же антенне) независимо будет требоваться комплексный и потенциально громоздкий процесс. Кроме того, любая конкретная обратная связь для передачи по прямому каналу или пилот-сигналы, используемые для передачи по обратному каналу, для любого определенного терминала доступа являются объектом шума для этого пользователя. Поэтому для любого определенного калибровочного отношения, оцененного на основе прямого и обратного каналов, имеется некоторая ошибка, представленная канальным изменением и шумом. Поэтому в некоторых аспектах одно или более калибровочных отношений, оцененных для ряда различных антенн различных терминалов доступа, объединяются для получения единственного калибровочного отношения, используемого точкой доступа для передачи на один или все терминалы доступа. В определенных аспектах комбинация может составлять среднее из всех калибровочных отношений для каждой антенны каждого терминала доступа, связывающегося с точкой доступа, или некоторый заранее заданный поднабор. В другом аспекте комбинация может быть сделана в виде оптимизации соединения, где канальные измерения из и для каждой антенны каждого терминала доступа объединяются для оценки единственного калибровочного отношения, которое является комбинацией рассогласований усилений для каждой антенны каждого терминала доступа, без вычисления отдельного калибровочного отношения для каждой антенны каждого терминала доступа.
Для любой определенной антенны каждого терминала доступа точка доступа использует свои канальные оценки обратного канала для этой антенны, а также канальные оценки прямого канала, которые выполняются в терминале доступа и возвращаются в точку доступа для оценки или вычисления калибровочного отношения на основе этой антенны этого терминала доступа.
Канальная оценка,  , прямого канала может оцениваться в терминале доступа для передач от i-й передающей антенны точки доступа к антенне терминала доступа. Однако любая канальная оценка будет иметь компоненты, относящиеся к шуму канала, наряду с любым усилением или искажением, вызванным передающей цепью точек доступа и передающей цепью терминалов доступа. Канальная оценка прямого канала может затем записываться как:
, прямого канала может оцениваться в терминале доступа для передач от i-й передающей антенны точки доступа к антенне терминала доступа. Однако любая канальная оценка будет иметь компоненты, относящиеся к шуму канала, наряду с любым усилением или искажением, вызванным передающей цепью точек доступа и передающей цепью терминалов доступа. Канальная оценка прямого канала может затем записываться как:
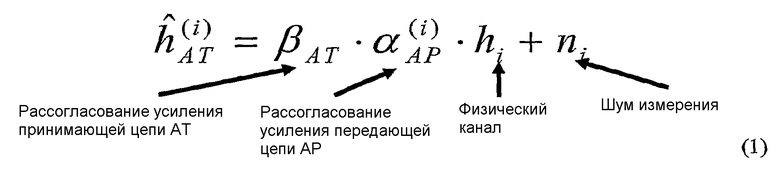
В формуле 1 канальная оценка является функцией рассогласования βAT усиления принимающей цепи терминала доступа для конкретной антенны, рассогласования  передающей цепи точки доступа, hi, которая является физическим каналом между двумя измеряемыми антеннами, и шума ni канала, который является частью канальной оценки.
передающей цепи точки доступа, hi, которая является физическим каналом между двумя измеряемыми антеннами, и шума ni канала, который является частью канальной оценки.
В случае передач по обратному каналу канальная оценка в i-й приемной антенне точки доступа, соответствующей передаче из антенны терминала  доступа, по существу равна инверсии формулы 1. Это можно видеть в формуле 2 ниже:
доступа, по существу равна инверсии формулы 1. Это можно видеть в формуле 2 ниже:
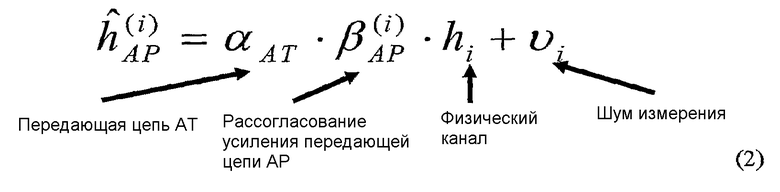
В формуле 2 эта канальная оценка является функцией рассогласования αAT усиления передающей цепи терминала доступа для этой антенны, рассогласования  усиления принимающей цепи точки доступа, hi, которая является физическим каналом между двумя измеряемыми антеннами, и шума
усиления принимающей цепи точки доступа, hi, которая является физическим каналом между двумя измеряемыми антеннами, и шума  канала, который является частью канальной оценки.
канала, который является частью канальной оценки.
Для калибровки антенной матрицы ошибки рассогласования между принимающими цепями 102 и передающими цепями 104 антенны 100 показываются здесь ниже в формуле 3. Следует отметить, что другие методики и математические отношения могут использоваться для достижения матричной калибровки в связке с, вместо, методик и математических отношений, описанных здесь.

В формуле 3, ci - полное отношение рассогласования между передачами обратного канала и передачей прямого канала, γ - отношение рассогласования усилений между передающей и принимающей цепями терминала доступа для конкретной антенны, и ηi - отношение рассогласования принимающей и передающей цепей для i-й антенны в точке доступа. Следует отметить, что γ является по существу постоянной для каждой пары антенн в точке доступа. Также в некотором отношении формула 3 является идеализированной, так как оценка шума не включена сюда.
Калибровочные отношения ci, i=1, …, M, где M - номер антенны в антенной матрице точки доступа, могут быть сгруппированы в один вектор  , для каждой антенны в терминале доступа, который может быть назван - «вектор калибровки».
, для каждой антенны в терминале доступа, который может быть назван - «вектор калибровки».
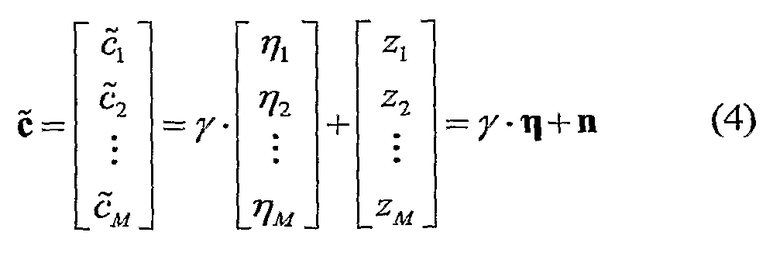
В формуле 4 объекты вектора  соответствуют оценками для каждой антенны точки доступа по отношению к единственной антенне терминала доступа. Следует отметить, что элементы вектора могут быть комплексными числами, включающими в себя амплитудное и фазовое рассогласование для каждой передающей и принимающей цепей антенной матрицы точки доступа, а также общее рассогласование, соответствующее рассогласованию передачи и приему передающей и принимающей цепей точки доступа для конкретной антенны. Следует отметить, что, хотя формула 4 описывает вектор, который имеет объекты для антенн одного терминала доступа, он может включать в себя объекты для множества терминалов доступа или множества антенн терминалов доступа.
соответствуют оценками для каждой антенны точки доступа по отношению к единственной антенне терминала доступа. Следует отметить, что элементы вектора могут быть комплексными числами, включающими в себя амплитудное и фазовое рассогласование для каждой передающей и принимающей цепей антенной матрицы точки доступа, а также общее рассогласование, соответствующее рассогласованию передачи и приему передающей и принимающей цепей точки доступа для конкретной антенны. Следует отметить, что, хотя формула 4 описывает вектор, который имеет объекты для антенн одного терминала доступа, он может включать в себя объекты для множества терминалов доступа или множества антенн терминалов доступа.
Вектор η шума включает в себя результаты ошибок (MSE) канальных измерений и также результаты декорреляции канальных измерений, поскольку измерения усилений выполняются в различные моменты времени, таким образом, допуская канальное изменение в динамике по времени, а также температуру и другие изменения для осуществления измерения.
Оцененный вектор  калибровки, соответствующий терминалу u доступа, может определяться, как показано ниже в формуле 5.
калибровки, соответствующий терминалу u доступа, может определяться, как показано ниже в формуле 5.

где γu - рассогласование усилений, соответствующее передающей и принимающей цепям антенны терминала доступа, и η - вектор рассогласования, соответствующий передающей и принимающей цепям антенной матрицы точки доступа. Вектор  определяется для всех антенн антенной матрицы точки доступа по отношению к каждой антенне каждого терминала доступа.
определяется для всех антенн антенной матрицы точки доступа по отношению к каждой антенне каждого терминала доступа.
В указанном выше следует отметить, что имеется несколько способов объединения различных оценок векторов калибровки (соответствующих измерениям от различных антенн различных терминалов доступа) для формирования общего или объединенного вектора калибровки. Одним способом выполнения этой комбинации является усреднение всех оценок вектора калибровки для получения единственной оценки.
В этом подходе каждая оценка вектора калибровки включает в себя мультипликативный множитель, γu, который отличается для различных терминалов доступа. В случае, где один или более терминалов доступа имеют очень большое рассогласование γu усиления, простое усреднение может привести к результатам s смещения средней к антеннам, имеющим наибольшее рассогласование γu усиления.
В другом аспекте каждая оценка вектора калибровки, соответствующая конкретному терминалу доступа, нормируется в соответствующем элементе вектора. Это может обеспечивать минимизацию в тех случаях, где один или более терминалов доступа имеют большое рассогласование γu усиления. Этот процесс показывается ниже в формуле 6.

Следует отметить, что в определенных аспектах элемент нормализации может быть любым элементом вектора калибровки, поскольку он является тем же самым элементом для каждой оценки вектора калибровки, например первый элемент. Сумма нормированных элементов затем разделяется на итоговое количество элементов U вектора  .
.
Другой подход, который может использоваться для объединения различных оценок векторов калибровки, может быть с учетом объединения оцененных векторов в матрице. Например, в определенных аспектах может каждая оценка вектора калибровки являться циклически сдвинутой и масштабированной версией одного и того же вектора η и циклическое смещение и масштабирование соответствует различным рассогласованиям γu для различных терминалов доступа. Одним способом избавления от этого масштабирования и циклического сдвига является первое нормирование каждого вектора калибровки к единичной норме. Затем матрица Q, чьи колонки являются нормированными оценками калибровки, могут формироваться из векторов калибровки. Единственная оценка для вектора калибровки получается посредством выполнения декомпозиции матрицы, например единственная декомпозиция значения на матрице Q. Собственный вектор, соответствующий максимальному единственному значению, может использоваться в качестве полной оценки вектора калибровки, например, как показано в формуле (7) ниже.

Как пояснено в указанных выше трех подходах, калибровочное отношение обычно оценивается двумя этапами. Сначала значения, соответствующие элементам векторов калибровки, вычисляются для антенной матрицы или тех антенн, которые участвуют. Вектора калибровки затем объединяются в соответствии с одним или более различными математическими методами.
Альтернативно для вычисления множества векторов калибровки используется процедура оптимизации соединения, использующая множество точек доступа и измерения при доступе, как указано ниже. В некоторых случаях антенны терминала доступа и точка доступа могут формировать их канальные оценки для различных частотных тонов и в различные временные интервалы. Кроме того, может быть временная ошибка τk,u между точкой доступа и u-м терминалом доступа во время k. В этом случае векторная канальная оценка g i,k,u прямого канала, измеренная в антенне терминала доступа, может относиться к векторной канальной оценке h i,k,u обратного канала, измеренной в точке доступа. Один подход, использующий вектор η калибровки и рассогласование γu антенны терминала доступа, показан в формуле 8 ниже.

В формуле 8 Z
i,k,u - диагональная матрица, чьи диагональные элементы являются элементами векторной канальной оценки h
i,k,u обратного канала и  . Индексы i, k, u являются тоном, временем и пользовательскими индексами соответственно. В указанной выше формуле неизвестным является вектор η калибровки и рассогласование γi,k,u конкретного терминала доступа. Особенность формулы 8 заключается в том, что рассогласование терминала доступа включает в себя результат временного рассогласования между точкой доступа и антенной терминала доступа в дополнение к рассогласованию усиления, соответствующему передающей и принимающей цепям терминала доступа для этой антенны. Другим способом получения решения для η и γj,k,u является использование подхода квадратичной ошибки с минимальным значением (MMSE), как показано в формуле 9.
. Индексы i, k, u являются тоном, временем и пользовательскими индексами соответственно. В указанной выше формуле неизвестным является вектор η калибровки и рассогласование γi,k,u конкретного терминала доступа. Особенность формулы 8 заключается в том, что рассогласование терминала доступа включает в себя результат временного рассогласования между точкой доступа и антенной терминала доступа в дополнение к рассогласованию усиления, соответствующему передающей и принимающей цепям терминала доступа для этой антенны. Другим способом получения решения для η и γj,k,u является использование подхода квадратичной ошибки с минимальным значением (MMSE), как показано в формуле 9.
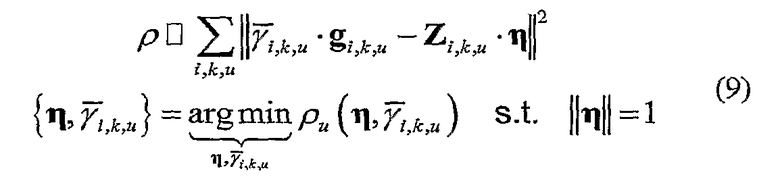
Решения для η и γi,k,u могут быть получены из формулы 10 ниже.
η□ минимальный собственный вектор
где для вектора x оператор  ортогональной проекции может определяться как
ортогональной проекции может определяться как

Для компенсации рассогласования калибровочные отношения могут использоваться для изменения усиления, в отношении обоих или любой, фазы и амплитуды передающей цепи точки доступа для согласования ее с принимающей цепью, или эквивалентно, для изменения усиления принимающей цепи точки доступа для согласования ее с передающей цепью.
Более конкретно, точка доступа может использовать формирование диаграммы направленности с объединением (MRC) максимальных отношений, формирование диаграммы направленности с объединением (EGC) равных усилений или любые другие методы предварительной пространственной обработки для передачи на любой терминал доступа. А именно, если канальный вектор обратного канала равен h, точка доступа использует следующие веса предварительной обработки для передачи:

С оценкой η вектора калибровки, точка доступа может использовать последующие веса предварительной обработки для компенсации рассогласований ее передающей и принимающей цепей:
Хотя фиг. 2 показывает и описывает один вариант осуществления приемной цепи 102 и передающей цепи 104, могут использоваться другие схемы и структуры. Например, различное число компонент может использоваться в принимающей цепи 102 и передающей цепи 104. Дополнительно, различные устройства и структуры могут также использоваться.
Следует отметить, что объединенные или соединенные векторы калибровки могут формироваться посредством обработки каждой антенны или группы антенн определенного терминала доступа как отдельного терминала доступа. В этом случае процесс калибровки может упрощаться и каждый терминал доступа не требует независимой калибровки.
Фиг. 3 показывает временной цикл для калибровки из единственного терминала доступа, где используется система TDD, имеющая единственный кадр прямого канала или интервал, смежный с единственным кадром обратного канала или интервалом. Как можно видеть, один или более пилот-сигналов, переданных от каждой антенны по обратному каналу, измеряется(ются) в точке доступа. Временной период измерения является функцией времени декодирования на точке доступа. Во время этого периода декодирования один или более пилот-сигналов передаются по прямому каналу в терминал доступа. Терминал доступа затем измеряет пилот-сигналы для оценки прямого канала для каждой приемной антенны. Так же как с оценками обратного канала, существуют некоторые отставания декодирования. Декодированные оценки прямого канала необходимо передать обратно на точку доступа для формирования калибровочного отношения. Поэтому можно видеть, что есть некоторое минимальное количество времени, и поэтому максимальная скорость терминала доступа, для которого калибровка может поддерживаться без замедления, является значительным или по существу мешающим фактором.
Как можно видеть из фиг. 3, если используется множество канальных оценок из множества терминалов доступа, шум и связанное замедление могут уменьшаться или по меньшей мере отбираться во временном интервале и принимающих цепях. Кроме того, если используется множество антенн для каждого терминала доступа и обработанные независимо отклонение и шум могут быть лучше оценены, так как шум и отклонение могут быть более однообразными для этих антенн единственного терминала доступа, то таким образом уменьшаются любые аномалии для данной антенны.
Фиг. 4 показывает аспекты логики, которая облегчает калибровку антенной матрицы для компенсации рассогласования усиления. Система 300 содержит компонент 302 калибровки, который включает в себя компонент 304 оценки рассогласования, который анализирует выходные сигналы принимающих цепей и/или сравнивает выходные сигналы принимающей цепи, и средство 306 вычисления суммы отношений, которое вычисляет отношения, которые используются для формирования вектора η, и суммирует их для использования в одном из способов, описанных выше, для объединения различных измерений от различных антенн различных терминалов доступа.
Фиг. 5 показывает аспекты системы, которая облегчает калибровку антенной матрицы для компенсации рассогласования усиления. Система 400 содержит процессор 402, который оперативно соединен с антенной матрицей 404. Процессор 402 может определять рассогласования усилений для отдельных комбинаций антенн в терминале доступа и точке доступа, используя компонент 406 калибровки. Процессор 402, кроме того, содержит калибровочный компонент 406, который определяет калибровочные отношения и затем формирует и использует вектор η.
Система 400 может дополнительно содержать память 408, которая оперативно соединена с процессором 402 и которая хранит информацию, относящуюся к калибровке матрицы, генерации и использованию отношения, и генерирует данные генерации калибровки и т.д., и любую другую соответствующую информацию, относящуюся к калибровке антенной матрицы 404. Сдует учитывать, что процессор 402 может быть процессором, предназначенным для анализа и/или формирования информации, принимаемой процессором 402, процессором, который управляет одним или более компонентами системы 400, и/или процессором, который анализирует и формирует информацию, принятую процессором 402, и управляет одним или более компонентами системы 400.
Память 408 может дополнительно сохранять протоколы, связанные с формированием копий сигналов и моделей/представлений, оценок рассогласования и т.д., так что система 400 может использовать сохраненные протоколы и/или алгоритмы для достижения калибровки антенны и/или компенсации рассогласования, как описано здесь. Будет очевидно, что компоненты хранения данных (например, памяти), описанные здесь, могут быть энергозависимой памятью или энергонезависимой памятью или могут включать в себя энергозависимую и энергонезависимую память. В качестве иллюстрации, но не ограничивая, энергонезависимая память может включать в себя постоянное запоминающее устройство (ROM), программируемое ROM (PROM), электрически программируемое ROM (EPROM), электрически стираемое ROM (EEPROM) или флэш-память. Энергозависимая память может включать в себя оперативную память (RAM), которая действует в качестве внешней кэш-памяти. В качестве иллюстрации и не ограничивая, RAM имеется во многих формах, таких как синхронная RAM (SRAM), динамическая RAM (DRAM), синхронная DRAM (SDRAM), SDRAM с двойной скоростью данных (DDR SDRAM), расширенная SDRAM (ESDRAM), DRAM с синхронизирующим каналом (SLDRAM) и RAM фирмы Rambus (DRRAM). Память 408 объектных систем и способов предполагается для содержания, без ограничения, этих и любых других подходящих типов памяти.
В определенных аспектах память 408 может сохранять вектора  калибровки для каждого состояния, т.е. уровень усиления, AGC. В таких аспектах для каждой передачи процессор 402 может иметь доступ к вектору калибровки для состояния AGC без выполнения калибровки. Решение относительно выполнения дополнительной калибровки или доступа к предыдущему вектору калибровки для данной передачи может быть с учетом временного периода или числа передач, если был получен вектор калибровки для состояния AGC. Оно может быть системным параметром или может изменяться с учетом канальных условий, например загрузки канала.
калибровки для каждого состояния, т.е. уровень усиления, AGC. В таких аспектах для каждой передачи процессор 402 может иметь доступ к вектору калибровки для состояния AGC без выполнения калибровки. Решение относительно выполнения дополнительной калибровки или доступа к предыдущему вектору калибровки для данной передачи может быть с учетом временного периода или числа передач, если был получен вектор калибровки для состояния AGC. Оно может быть системным параметром или может изменяться с учетом канальных условий, например загрузки канала.
На фиг. 6 показывается методика, относящаяся к формированию дополнительных назначений системных ресурсов. Например, методики могут относиться к калибровке антенной матрицы в среде TDMA, среде OFDM, среде OFDMA, среде CDMA или любой другой подходящей беспроводной среде. Хотя для целей упрощения объяснения методика показывается и описывается как последовательность операций, но понятно и оценено, что методики не ограничиваются порядком операций, так как некоторые операции могут в соответствии с одним или более вариантами осуществления появляться в различных порядках и/или одновременно с другими операциями, которые показаны и описаны здесь. Например, специалисту в уровне технике будет понятно и оценено, что методика может альтернативно представляться в качестве последовательностей взаимосвязанных состояний или случаев, таких как в диаграмме состояния. Кроме того, не все показанные операции могут требоваться для реализации методики в соответствии с одним или более вариантами осуществления.
Фиг. 6 показывает методику калибровки матрицы антенн для передачи. Канальные оценки для прямого канала принимаются от терминалов доступа для каждой приемной антенны терминала доступа, блок 500. Как обсуждено выше, эти канальные оценки могут формироваться исходя из пилот-сигналов прямого канала, переданных точкой доступа. Дополнительно, канальные оценки для информации обратного канала, например канальные пилот-сигналы обратного канала, формируются точкой доступа для каждой передающей антенны терминала доступа, блок 502.
После сбора канальных оценок прямого канала и обратного канала могут определяться, блок 504, калибровочные отношения для каждой антенны терминала доступа и антенны точки доступа. В определенных аспектах самая последняя канальная оценка прямого канала и обратного канала по отношению к каждой другой во времени используется для формирования калибровочного отношения. В этом случае множество оценок для данного терминала доступа может выполняться с учетом последовательных пар канальных оценок из оценок прямого канала и обратного канала.
Как обсуждено в отношении фиг. 3, может быть некоторое временное отставание между различными вычислениями и передачами. Кроме того, функция блоков 500 и 502 может происходить по существу одновременно или в разное время для одних и тех же или разных терминалов доступа, хотя они, вероятно, являются одними и теми же для разных антенн единственного терминала доступа. Поэтому калибровочное отношение может определяться для данной антенны данного терминала доступа с учетом канальных оценок передач по прямому каналу и по обратному каналу, которые могут или не могут быть последовательными во времени.
Калибровочные отношения затем объединяются для формирования калибровочной оценки для множества терминалов доступа, блок 506. Это объединенное калибровочное отношение может включать в себя калибровочные отношения для некоторых или всех антенн различных терминалов доступов в данном секторе или соте и иметь разное или одинаковое число калибровочных отношений для каждой антенны терминала доступа, для которой получено одно или более калибровочных отношений.
Объединенное калибровочное отношение может получаться посредством простого усреднения калибровочных отношений или использования других подходов, обсужденных в отношении фиг. 2, например подходы, обсужденные в отношении формул 5 или 7.
Каждая передача из каждой передающей цепи точки доступа затем взвешивается весами с учетом объединенного калибровочного отношения для этой передающей цепи. Также объединенный или соединенный набор калибровочных весов может использоваться для одной или более передающих цепей точки доступа. Альтернативно, возможна передача этого объединенного калибровочного отношения или калибровочной команды с учетом объединенного калибровочного отношения на одну или более антенн терминала доступа. Терминалы доступа будут затем применять веса с учетом объединенного калибровочного отношения для декодирования передач, принятых в антенне терминала доступа.
Также в некоторых аспектах калибровочные веса используются для конкретного состояния AGC, а не для других состояний AGC. По существу, блок 508 будет затем только применяться к состоянию AGC во время блока 500.
Фиг. 7 показывает другую методику калибровки матрицы антенны для передачи. Канальные оценки для прямого канала принимаются от терминалов доступа для каждой принимающей антенны терминала доступа, блок 600. Как обсуждено выше, эти канальные оценки могут формироваться исходя из пилот-сигналов прямого канала, переданных точкой доступа. Дополнительно, канальные оценки для информации обратного канала, например канальные пилот-сигналы обратного канала, формируются точкой доступа для каждой передающей антенны терминала доступа, блок 602.
После этого собираются канальные оценки прямого канала и обратного канала, калибровочное отношение, которое использует множество канальных оценок для множества антенн множества терминалов доступа, блок 604. В определенных аспектах используется самая последняя канальная оценка прямого канала и обратного канала по отношению к каждой другой по времени. В таких случаях множество оценок для данного терминала доступа может выполняться с учетом пар последовательных канальных оценок из канальных оценок прямого канала и обратного канала.
Как обсуждено в отношении фиг. 3, может быть некоторое временное запаздывание между различными вычислениями и передачами. Кроме того, функция блоков 600 и 602 может возникать по существу одновременно или в разное время для одного и того же или разных терминалов доступа, хотя они, вероятно, являются одинаковыми для различных антенн одного терминала доступа. Поэтому канальные оценки могут определяться для данной антенны данного терминала доступа с учетом канальных оценок передач по прямому каналу и обратному каналу, которые могут или не могут быть последовательными во времени.
Соединенное калибровочное отношение может получаться посредством использования процесса оптимизации соединения, как обсуждено в отношении фиг. 2, например формула 8.
Каждая передача из каждой передающей цепи точки доступа затем взвешивается с учетом соединенного калибровочного отношения для этой передающей цепи. Также объединенный или соединенный набор калибровочных весов может использоваться для одной или более передающих цепей точки доступа. Альтернативно, возможно передать это соединенное калибровочное отношение или команду калибровки с учетом соединенного калибровочного отношения на одну или более антенн одного или более терминалов доступа. Терминалы доступа будут затем применять веса с учетом соединенного калибровочного отношения для декодирования передач, принятых в антенне терминала доступа.
Также в некоторых аспектах калибровочные веса используются для конкретного состояния AGC, а не для других состояний AGC. По существу, блок 608 будет затем только применяться для состояния AGC в течение блока 600.
Фиг. 8 показывает примерную систему 1300 беспроводной связи. Система 1300 беспроводной связи показывает одну базовую станцию и один терминал для краткости. Однако понятно, что система может включать в себя более чем одну базовую станцию и/или более чем один терминал, где дополнительные базовые станции и/или терминалы могут по существу быть одинаковыми или отличаться от примерной базовой станции и терминала, описанных ниже. Кроме того, понятно, что базовая станция и/или терминал могут использовать системы (фиг. 1-5) и/или способы (фиг. 6-7), описанные здесь, для облегчения беспроводной связи между ними.
На фиг. 8 показывается передатчик и приемник в системе беспроводной связи с множественным доступом. В системе 1310 передатчика данные трафика для ряда потоков данных предоставляются из источника 1312 данных на процессор 1344 данных передачи (TX). В варианте осуществления каждый поток данных передается через соответствующую передающую антенну. Процессор 1344 данных TX форматирует, кодирует и перемежает данные трафика с учетом конкретной схемы кодирования, выбранной для этого потока данных, для обеспечения кодированных данных. В некоторых вариантах осуществления процессор 1344 данных TX применяет взвешивания формирований диаграмм направленностей к символам потоков данных с учетом пользователя, которому символы передаются, и антенны, с которой символы передаются. В некоторых вариантах осуществления веса формирования диаграммы направленности могут формироваться с учетом информации о канальном отклике, которая указывает условия путей передачи между точкой доступа и терминалом доступа. Информация канального отклика может формироваться с использованием информации CQI или канальных оценок, предоставленных пользователем. Кроме того, в таких случаях запланированных передач процессор 1344 данных TX может выбирать формат пакетов с учетом ранговой информации, которая передается от пользователя.
Кодированные данные для каждого потока данных могут мультиплексироваться с данными пилот-сигналов, используя методы OFDM. Данные пилот-сигналов обычно являются известными образцами данных, которые обрабатываются известным способом и могут использоваться в принимающей системе для оценки канального отклика. Мультиплексированные пилот-сигналы и кодированные данные для каждого потока данных затем модулируются (т.е. посимвольно преобразуются) на основе конкретной схемы модуляции (например, BPSK, QSPK, M-PSK или M-QAM), выбранной для этого потока данных для обеспечения символов модуляции. Скорость данных, кодирование и модуляция для каждого потока данных может определяться командами, исполняемыми процессором 1330. В некоторых вариантах осуществления ряд параллельных пространственных потоков может изменяться в соответствии с ранговой информацией, которая передается от пользователя.
Символы модуляции для всех потоков данных затем предоставляются процессору 1346 TX MIMO, который может дополнительно обрабатывать символы модуляции (например, для OFDM). Процессор 1346 TX MIMO затем предоставляет потоки символов NT для NT передатчиков (TMTR) 1322а-1322t. В определенных вариантах осуществления процессор 1320 TX MIMO применяет веса формирования диаграммы направленности к символам потоков данных с учетом пользователя, которому символы передаются, и антенны, с которой символы передаются из информации пользовательского канального отклика.
Каждый передатчик 1322 принимает и обрабатывает соответствующий поток символов для обеспечения одного или более аналоговых сигналов и дополнительно обрабатывает (например, усиливает, фильтрует и преобразовывает с повышением) аналоговые сигналы для обеспечения модулированных сигналов, подходящих для передачи по каналу MIMO. NT модулированные сигналы из передатчиков 1322а-1322t затем передаются с NT антенн 1324а-1324t соответственно.
В системе 1320 приемника переданные модулированные сигналы принимаются NR антеннами 1352а-1352r и принятый сигнал с каждой антенны 1352 передается на соответствующий приемник (RCVR) 1354а-1354r. Каждый приемник 1354 обрабатывает (например, фильтрует, усиливает и преобразует с понижением) соответствующий принятый сигнал, оцифровывает обработанный сигнал для обеспечения выборок и дополнительно обрабатывает выборки для обеспечения потока, соответствующего «принятым» символам.
Процессор 1360 данных RX затем принимает и обрабатывает NR потоков принятых символов от NR приемников 1354а-1354r на основе метода обработки конкретным приемником для обеспечения ранжированного числа «определенных» потоков символов. Обработка процессором 1360 данных RX описывается дополнительно подробно ниже. Каждый определенный поток символов включает в себя символы, которые являются оценками символов модуляции, переданных для соответствующего потока данных. Процессор 1360 данных RX затем демодулирует, деперемежает и декодирует каждый определенный поток символов для восстановления данных трафика для потока данных, который предоставляется приемнику 1364 данных для сохранения и/или дополнительной обработки. Обработка процессором 1360 данных RX является дополнительно к той, которая выполняется процессором 1346 TX MIMO и процессором 1344 данных TX в системе 1310 передатчика.
Оценка канального отклика, сформированного процессором 1360 RX, может использоваться для выполнения пространственной, пространственной/временной обработки в приемнике, выравнивания уровней мощностей, изменения отношений или схем модуляции или других действий. Процессор 1360 RX может, кроме того, оценивать отношения (SNR) сигнал-шум-помеха определенного потока символов и возможные другие канальные характеристики и предоставлять эти величины процессору 1370. Процессор 1360 данных RX или процессор 1370 может дополнительно получать оценки «эффективного» SNR для системы. Процессор 1370 затем обеспечивает информацию (CSI) оцененного канала, которая может содержать различные типы информации, относящиеся к каналу связи и/или потоку принятых данных. Например, CSI может содержать только текущее SNR. В некоторых вариантах осуществления канальная информация может содержать отношение уровня сигнала к шуму и помехам (SINR). CSI затем обрабатывается процессором 1378 данных TX, который также принимает данные трафика для ряда потоков данных от источника данных 1376, модулированных модулятором 1380, обрабатывается передатчиком 1354а-1354r и передается обратно на систему 1310 передатчика.
В системе 1310 передатчика модулированные сигналы от системы 1350 приемника принимаются антеннами 1324, обрабатываются приемником 1322, демодулируются демодулятором 1390 и обрабатываются процессором 1392 данных RX для восстановления CSI, сообщенной системой приемника, и для обеспечения данных в приемнике 1394 данных для запоминания и/или дополнительной обработки. Сообщенная CSI затем предоставляется процессору 1330 и используется для (1) определения скорости данных и схем кодирования и модуляции, используемых для потоков данных, и (2) формирования различных управляющих сигналов для процессора 1344 данных TX и процессора 1346 TX MIMO.
Процессор 1390 может также выполнять формирование калибровочных отношений и объединенного калибровочного отношения или соединенного калибровочного отношения, как обсуждено в отношении фиг. 2, 6 и 7 соответственно. Кроме того, каждая антенна 1352а-1352r может считаться в качестве отдельного терминала для целей объединенной или соединенной калибровочной оценки.
На фиг. 9 точка доступа может содержать основной блок (MU) 1450 и радио блок (RU) 1475. MU 1450 включает в себя компоненты цифровой немодулированной передачи точки доступа. Например, MU 1450 может включать в себя компонент 1405 немодулированной передачи и блок 1410 цифровой обработки промежуточной частоты (IF). Блок 1410 цифровой обработки IF обрабатывает данные радиоканала в промежуточной частоте посредством выполнения таких функций, как фильтрация, канализация, модуляция и так далее. RU 1475 включает в себя аналоговые радио части точки доступа. Как использовано здесь, радио блок является аналоговыми радио частями точки доступа или другого типа станции передатчика с прямым или непрямым соединением с мобильным коммутационным центром или соответствующим устройством. Радио блок обычно обслуживает конкретный сектор в системе связи. Например, RU 1475 может включать в себя один или более приемников 1430, связанных с одной или более антенн 1435а-t, для приема радиопередач от блоков мобильных абонентов. В аспекте один или более усилителей 1482а-t мощности соединены с одной или более антенн 1435а-t. Аналого-цифровой (A/D) преобразователь 1425 соединен с приемником 1430. A/D преобразователь 1425 преобразовывает аналоговые радиопередачи, принятые приемником 1430, в цифровой входной сигнал для передачи на компонент 1405 немодулированной передачи через блок 1410 цифровой обработки IF. RU 1475 может также включать в себя один или более передатчиков 120, соединенных с одной и той же или разными антеннами 1435 для передачи радиопередач на терминалы доступа. Цифроаналоговый (D/A) преобразователь 1415 соединен с передатчиком 1420. D/A преобразователь 1415 преобразует цифровые передачи, принятые от компоненты 1405 немодулированной передачи через блок 1410 цифровой обработки IF, в аналоговый выходной сигнал для передачи на мобильные блоки абонентов. В некоторых аспектах мультиплексор 1484 для мультиплексирования многоканальных сигналов и мультиплексирования разных сигналов включает голосовой сигнал и сигнал данных. Центральный процессор 1480 соединен с основным блоком 1450 и радио блоком для управления различными обработками, которые включают в себя обработку голосового сигнала или сигнала данных.
Для системы множественного доступа (например, система множественного доступа с частотным разделением (FDMA), система множественного доступа с ортогональным частотным разделением (OFDMA), система множественного доступа с кодовым разделением (CDMA), система множественного доступа с временным разделением (TDMA) и т.д.) множество терминалов могут передавать одновременно по обратному каналу. Для такой системы пилотные поднесущие могут распределяться среди различных терминалов. Методы канальных оценок могут использоваться в случае, где пилотные поднесущие для каждого терминала охватывают всю рабочую полосу частот (возможно исключить концы полосы частот). Такая структура пилотных поднесущих будет желательной для получения частотного разнесения для каждого терминала. Методы, описанные здесь, могут реализовываться различными средствами. Например, эти методы могут реализовываться аппаратно, программно или их комбинацией. Для аппаратной реализации обрабатывающие блоки, используемые для канальной оценки, могут реализовываться в одной или более специализированных интегральных схем (ASIC), процессорах цифровых сигналов (DSP), устройствах обработки цифровых сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матриц (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных блоках, предназначенных для выполнения функций, описанных здесь, или их комбинациях. В программной реализации могут быть модули (например, процедуры, функции и т.д.), которые выполняют функции, описанные здесь. Программные коды могут сохраняться в блоке памяти и выполняться процессорами 1390 и 1350.
То, что было описано выше, включает в себя примеры одного или более вариантов осуществления. Конечно, невозможно описать каждую возможную комбинацию компонент или методов для целей описанных вышеупомянутых вариантов осуществления, но каждый из специалистов в уровне техники может признать, что возможны многие другие комбинации и изменения различных вариантов осуществления. Соответственно, описанные варианты осуществления предназначены для включения всех таких изменений, модификаций и вариаций, которые попадают в сущность и объем приложенной формулы. Кроме того, объем этого термина «включает в себя» используется в подробном описании или в формуле, такой термин предполагается для включения способом, аналогичным термину «содержащий», как и «содержащий» интерпретируется, когда используется как обычное слово в формуле.

Изобретение относится к области беспроводной связи и может использоваться для калибровки антенной матрицы для многовходовых и многовыходных систем беспроводной связи. Достигаемый технический результат - расширение и улучшение возможностей устройств беспроводной связи. Сущность изобретения состоит в калибровке антенной матрицы точки доступа в беспроводной сети, содержащей этапы приема первых канальных оценок, соответствующих передачам из точки доступа на каждую из, по меньшей мере, двух антенн, по меньшей мере, двух терминалов доступа, определения вторых канальных оценок, соответствующих передачам от каждой из, по меньшей мере, двух антенн упомянутых, по меньшей мере, двух терминалов доступа в точку доступа, определения калибровочного отношения на основе упомянутых оценок и калибровки антенной матрицы точки доступа применением калибровочного отношения к весам передачи точки доступа. 4 н. и 24 з.п. ф-лы, 9 ил.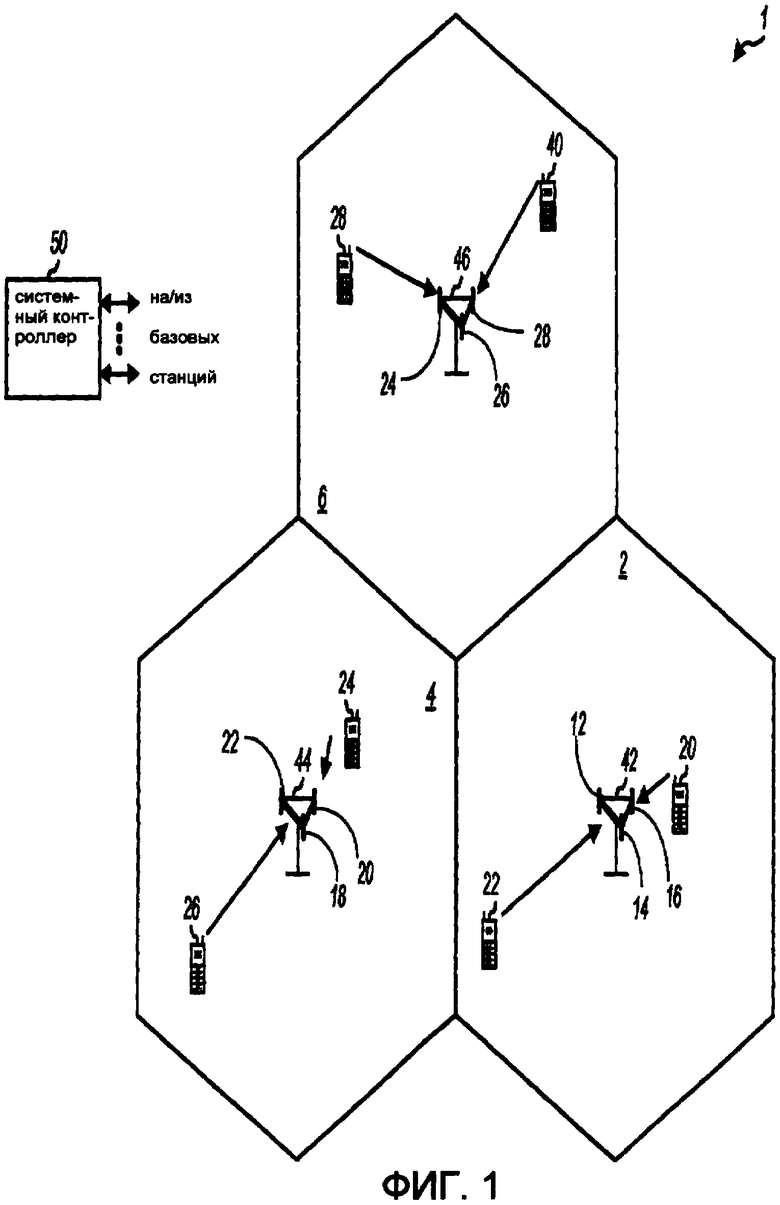
1. Способ калибровки антенной матрицы точки доступа в беспроводной сети, содержащий этапы, на которых принимают первые канальные оценки, соответствующие передачам из точки доступа на каждую из, по меньшей мере, двух антенн, по меньшей мере, двух терминалов доступа, причем, по меньшей мере, две антенны включают в себя различные антенны одного из, по меньшей мере, двух терминалов доступа; определяют вторые канальные оценки, соответствующие передачам от каждой из, по меньшей мере, двух антенн упомянутых, по меньшей мере, двух терминалов доступа в точку доступа; определяют калибровочное отношение на основе первых канальных оценок и вторых канальных оценок и калибруют антенную матрицу точки доступа применением калибровочного отношения к весам передачи точки доступа.
2. Способ по п.1, в котором этап определения калибровочного отношения содержит этап, на котором определяют калибровочное отношение антенн терминалов доступа независимо.
3. Способ по п.2, в котором этап определения калибровочного отношения содержит этап, на котором объединяют каждое из упомянутых калибровочных отношений.
4. Способ по п.3, в котором этап объединения содержит этап, на котором усредняют каждое из упомянутых калибровочных отношений.
5. Способ по п.3, в котором каждое из упомянутых калибровочных отношений содержит множество элементов и в котором этап объединения содержит этапы, на которых нормируют каждое калибровочное отношение и определяют калибровочное отношение на основе матрицы, включающей в себя нормированные калибровочные отношения.
6. Способ по п.5, в котором этап определения калибровочного отношения на основе матрицы содержит этап, на котором разлагают матрицу, используя сингулярное разложение.
7. Способ по п.1, в котором этап определения калибровочного отношения содержит этап, на котором определяют соединенное калибровочное отношение на основе первых и вторых канальных оценок.
8. Способ по п.1, в котором этап определения калибровочного отношения содержит этап, на котором решают уравнение

где Zi,k,u - диагональная матрица, чьи диагональные элементы являются элементами вторых канальных оценок hi,k,u, γi,u=γu· и индексы i, k, u представляют индексы тона, времени и пользователя соответственно.
и индексы i, k, u представляют индексы тона, времени и пользователя соответственно.
9. Способ по п.8, в котором этап решения включает в себя использование метода минимальной среднеквадратической ошибки (ММSЕ) для решения уравнения.
10. Способ по п.1, в котором этап определения калибровочного отношения содержит этап, на котором используют объединенную схему оптимизации с первыми и вторыми канальными оценками.
11. Устройство беспроводной связи, содержащее по меньшей мере две антенны и процессор, соединенный с упомянутыми, по меньшей мере, двумя антеннами, причем процессор выполнен с возможностью принимать первые канальные оценки, соответствующие передачам из устройства на каждую из, по меньшей мере, двух антенн, по меньшей мере, двух терминалов доступа, при этом, по меньшей мере, две антенны включают в себя различные антенны одного из, по меньшей мере, двух терминалов доступа, определять вторые канальные оценки, соответствующие передачам из каждой из, по меньшей мере, двух антенн упомянутых, по меньшей мере, двух терминалов доступа в устройство, и определять калибровочное отношение на основании первых канальных оценок и вторых канальных оценок.
12. Устройство беспроводной связи по п.11, в котором процессор выполнен с возможностью определения калибровочного отношения для каждой антенны терминалов доступа и определения калибровочного отношения на основе объединения каждого из калибровочных отношений для каждой из упомянутых антенн терминалов доступа.
13. Устройство беспроводной связи по п.12, в котором процессор выполнен с возможностью объединения упомянутых отношений посредством усреднения каждого из упомянутых калибровочных отношений.
14. Устройство беспроводной связи по п.12, в котором процессор выполнен с возможностью объединения упомянутых отношений посредством нормирования каждого калибровочного отношения и с возможностью определения калибровочного отношения на основе матрицы, включающей в себя каждое из упомянутых калибровочных отношений.
15. Устройство беспроводной связи по п.14, в котором процессор выполнен с возможностью использовать сингулярное разложение для разложения упомянутой матрицы для получения калибровочного отношения.
16. Устройство беспроводной связи по п.11, в котором процессор выполнен с возможностью определения калибровочного отношения, используя соединенное калибровочное отношение на основе первых и вторых канальных оценок.
17. Устройство беспроводной связи по п.11, в котором процессор выполнен с возможностью определения калибровочного отношения посредством решения уравнения

где Zi,k,u - диагональная матрица, чьи диагональные элементы являются элементами вторых канальных оценок hi,k,u, γi,u=γu· и индексы i, k, u представляют индексы тона, времени и пользователя соответственно.
18. Устройство беспроводной связи по п.17, в котором процессор выполнен с возможностью решения упомянутого уравнения посредством использования метода минимальной среднеквадратичной ошибки (ММSЕ).
19. Устройство беспроводной связи по п.17, в котором процессор выполнен с возможностью определения калибровочного отношения с использованием объединенной схемы оптимизации с множеством первых и вторых канальных оценок.
20. Устройство для калибровки антенной матрицы точки доступа, содержащее средство для приема первых канальных оценок, соответствующих передачам из точки доступа на каждую из, по меньшей мере, двух антенн, по меньшей мере, двух терминалов доступа и принятых от упомянутых, по меньшей мере, двух терминалов доступа, при этом, по меньшей мере, две антенны включают в себя различные антенны одного из, по меньшей мере, двух терминалов доступа; средство для определения вторых канальных оценок, соответствующих передачам с каждой из, по меньшей мере, двух антенн упомянутых, по меньшей мере, двух терминалов доступа на точку доступа; средство для определения калибровочного отношения на основе первых канальных оценок и вторых канальных оценок и средство для калибровки антенной матрицы точки доступа применением калибровочного отношения к весам передачи точки доступа.
21. Устройство по п.20, в котором средство для определения калибровочного отношения содержит средство для определения калибровочного отношения для каждой из антенны точек доступа независимо.
22. Устройство по п.21, в котором средство для определения калибровочного отношения для каждой антенны независимо содержит средство для объединения каждого из упомянутых калибровочных отношений.
23. Устройство по п.22, в котором средство для объединения содержит средство для усреднения каждого из упомянутых калибровочных отношений.
24. Устройство по п.22, в котором каждое из упомянутых калибровочных отношений содержит множество элементов и в котором средство для объединения содержит средство для нормирования каждого калибровочного отношения и средство для определения калибровочного отношения на основе матрицы, включающей в себя нормированные калибровочные отношения.
25. Устройство по п.20, в котором средство для определения калибровочного отношения содержит средство для определения соединенного калибровочного отношения на основе первых и вторых канальных оценок.
26. Устройство по п.20, в котором средство для определения калибровочного отношения содержит средство для решения уравнения

где Zi,k,u - диагональная матрица, чьи диагональные элементы являются элементами вторых канальных оценок hi,k,u, γi,u=γu· и индексы i, k, u представляют индексы тона, времени и пользователя, соответственно.
27. Устройство по п.20, в котором средство для определения калибровочного отношения содержит средство для использования объединенной схемы оптимизации с первыми и вторыми канальными оценками.
28. Машиночитаемый носитель, имеющий сохраненные на нем команды для использования процессором, причем команды содержат команды для
приема первых канальных оценок, соответствующих передачам из точки доступа на каждую из, по меньшей мере, двух антенн, по меньшей мере, двух терминалов доступа, при этом, по меньшей мере, две антенны включают в себя различные антенны одного из, по меньшей мере, двух терминалов доступа; определения вторых канальных оценок, соответствующих передачам с каждой из упомянутых, по меньшей мере, двух антенн упомянутых, по меньшей мере, двух терминалов доступа на точку доступа; и определения калибровочного отношения на основе первых канальных оценок и вторых канальных оценок.
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ СВЯЗИ В АБОНЕНТСКОМ ПУНКТЕ БЕСПРОВОДНОЙ СИСТЕМЫ ЭЛЕКТРОСВЯЗИ | 1990 |
|
RU2159007C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

