1. Область техники, к которой относится изобретение
Настоящее изобретение относится к области обработки сигналов и гидроакустики.
Более конкретно настоящее изобретение относится к технологии автоматического обнаружения морских животных, то есть к технологии, которая позволяет обнаруживать присутствие морских животных в результате обнаружения испускаемых или звуков с использованием системы PAD ("пассивного акустического обнаружения").
Настоящее изобретение можно применять, в частности, но не исключительно, для обнаружения присутствия морских млекопитающих, включая китообразных (усатых китов и зубатых китов).
Для морских млекопитающих звукообразование делится на два семейства: коммуникационные сигналы (частотно-модулированные сигналы, свисты) и сигналы, используемые для восприятия их окружающей средой (импульсы, щелчки). Например, в целом звукообразование китообразных включает в себя излучение китов на очень низких частотах, излучение зубатых китов на средних частотах (свисты) и излучения зубатых китов на высоких частотах (щелчки).
Следует отметить, что если PAD система позволяет прослушивать и обнаруживать сигналы биологического происхождения, то она может также прослушивать и обнаруживать любой сторонний паразитный звук, создаваемый другими видами деятельности.
Идентифицирован широкий спектр приложений изобретения, от потребности ученых, работающих в области морской экологии, кто хочет иметь специальные инструменты наблюдения за морскими животными, для работающих в морской сфере, кто желает ограничить отрицательное влияние их деятельности на морских животных (рыбная ловля, военная деятельность, с излучением гидролокаторов, сбор геофизических данных для анализа морского дна (например, в отрасли нефтеразведки, использующей метод сейсмической съемки) и т.д.).
2. Уровень техники
В соответствии с сильной потребностью и при поддержке действующего научного сообщества для обнаружения морских животных были предложены многочисленные алгоритмические решения.
Ряд международных семинаров, проведенных с 2003 года отражают эту динамику:
- Специальный выпуск: "Detection and localization of marine mammals using passive acoustics", Canadian Acoustics, Vol.32, 2004.
- Специальный выпуск: "Detection and localization of marine mammals using passive acoustics", Applied Acoustics, vol. 67, 2006.
- Специальный выпуск: "Detection and classification of marine mammals using passive acoustics", Canadian Acoustics, Vol.36, 2008.
- Специальный выпуск: "Detection, classification, localization and census of marine mammals with passive acoustics monitoring". Applied Acoustics, vol.71, 2010.
Среди этих четырех ссылок можно отметить алгоритмические решения для обнаружения щелчков:
a) используя классическое решение дескриптора энергии: W.Mr.X. Zimmer, J. Harwood, P.L. Tyack, P. Johnson, and P.T. Madsen, "Passive acoustic detection of deep-diving beaked whales". The Journal of the Acoustical Society of America, vol.124, pp.2823-2832, 2008.
b) используя оригинальное решение дескриптора Теагера: V. Kandia and Y. Stylianou, "Detection of sperm whale clicks based On The Teager-Kaiser energy operator", Applied Acoustic, Vol.67, pp.1144-1163, 2006.
c) используя оригинальное решение дескриптора эксцесса: С. Gervaise, A. Barazzutti, S. Busson, Y. Simard, and N. Roy, "Automatic detection of Bioacoustics impulses based kurtosis under weak signal to noise ratio", Applied Acoustics, vol. 71, pp.1020-1026, 2010.
Для обнаружения свистов предложены алгоритмические решения:
a) с использованием спектрограммы: D. К. Mellinger and С.W. dark, "Recognizing transient low-frequency whale sounds by spectrogram correlation", The Journal of the Acoustical Society of America, Vol.107, pp.3518-3529, 2000.
b) с использованием преобразования Гильберта-Хуанга: Adam О (2006), "Advantages of the Hilbert Huang transform transform for marine mammals signals analysis", J. Acoust. Soc. Am 120: 2965-2973.
c) с использованием функции неопределенности высших порядков и операторов скручивания: С. loana, С. Gervaise, Y. Stephan, and J.I. March, "Analysis of underwater mammal vocalizations using time-frequency-phase tracker", Applied Acoustics, vol.71, pp.1070-1080, 2010.
В общем случае (в лучшем случае) вышеупомянутые известные решения обладают способностью адаптироваться к частоте (что позволяет выбирать частотный диапазон, в котором имеется сигнал, и устранять шум окружающей среды в других частотных диапазонах), и они выбирают специфический тест на обнаружение, который сравнивается с расчетным значением этого теста на обнаружение в случае только шума измерения.
К сожалению, эти известные решения имеют несколько ограничений:
- они не встраиваются в автономные системы связи;
- их характеристики являются постоянными или зависят от наличия обученного оператора, который может регулировать параметры настройки или архитектуру алгоритмических решений;
- они не адаптируются автоматически к свойствам (которое являются часто переменными) биологических звукообразований;
- они полностью не обрабатывают звукообразование морских животных в одном процессе;
- они не включают в себя обучение и подавление сигналов ложной тревоги, генерируемых из-за шума окружающей среды.
3. Задачи изобретения
Настоящее изобретение, по меньшей мере, в одном варианте осуществления, нацелено в особенности на устранение этих различных недостатков предшествующего уровня техники.
Более конкретно, задача, по меньшей мере, одного варианта осуществления настоящего изобретения состоит в том, чтобы обеспечить технологию обнаружения морских животных, причем технологию, которая обрабатывает звуки, генерируемые различными морскими животными в одном процессе (например, всех звуков, генерируемых морскими млекопитающими, включая китообразных (усатых китов и зубатых китов)).
Кроме того, задача, по меньшей мере, одного варианта осуществления изобретения состоит в том, чтобы обеспечить технологию обнаружения морских животных, причем технологию, которая имеет возможность адаптироваться к свойствам биологических источников звука и к свойствам шума окружающей среды.
Другая задача, по меньшей мере, одного варианта осуществления изобретения состоит в том, чтобы обеспечить технологию обнаружения морских животных, причем технологию, которая выполняется автоматически, при отсутствии оператора и с минимальным количеством предварительных параметров настройки и конфигурации.
Дополнительная задача, по меньшей мере, одного варианта осуществления изобретения состоит в том, чтобы предложить технологию обнаружения морских животных, которая позволяет работать в реальном времени во встроенной системе (то есть в автономной системе связи).
Дополнительная задача, по меньшей мере, одного варианта осуществления изобретения состоит в том, чтобы предложить технологию обнаружения морских животных, которая позволяет идентифицировать обнаружение звуков абиотического происхождения (например, обусловленных сейсмическими устройствами) и устранять их.
4. Сущность изобретения
Конкретный вариант осуществления изобретения предусматривает способ автоматического обнаружения морских животных, который выполняется с помощью устройства обнаружения и содержит:
- этап получения измерений акустических сигналов, собранных с помощью, по меньшей мере, одного акустического датчика в подводной среде;
- по меньшей мере, одну из следующих ветвей:
- первую ветвь, содержащую этап обнаружения частотно-модулированных звуков с помощью: осуществления параллельным образом нескольких первых каналов обнаружения, каждый из которых имеет различное и фиксированное значение, по меньшей мере, для одной степени свободы; выбора первого канала обнаружения, имеющего максимальное отношение сигнал/шум; и сравнения отношения сигнал/шум выбранного первого канала обнаружения с первым определенным порогом;
- вторую ветвь, содержащую этап обнаружения импульсных звуков с помощью: осуществления параллельным образом нескольких вторых каналов обнаружения, каждый из которых имеет различное и фиксированное значение для, по меньшей мере, одной степени свободы; выбора второго канала обнаружения, имеющего максимальное отношение сигнал/шум; и сравнения отношения сигнал/шум выбранного второго канал обнаружения со вторым определенным порогом;
- этап принятия решения относительно сигнала тревоги, показывающего присутствие, по меньшей мере, одного морского животного, в зависимости от выходного сигнала первой ветви и/или выходного сигнала второй ветви.
Таким образом, предложен передовой способ обработки измерений (уровней звукового давления), собранных с помощью, по меньшей мере, одного акустического датчика, для того, чтобы вывести предупреждение (решение относительно сигнала тревоги), которое информирует о присутствии одного или нескольких морских животных в диапазоне обнаружения акустического датчика.
При наличии у каждой ветви нескольких параллельных каналов обнаружения эта технология имеет многочисленные преимущества: она имеет способность адаптироваться к свойствам биологических источников звука и к свойствам шума окружающей среды, и она может выполняться автоматически (при отсутствии оператора и с минимальным количеством предварительных параметров установки конфигурации).
При использовании двух ветвей (одной для обработки частотно-модулированных звуков и другой для обработки импульсных звуков) эта технология позволяет обрабатывать звукообразование различных морских животных в одном процессе.
Согласно конкретной особенности упомянутая, по меньшей мере, одна степень свободы принадлежит группе, содержащей:
- способы и соответствующие параметры для представления измерений акустических сигналов в новом пространстве представления;
- количественные характеристики сигналов, в которых измерения акустических сигналов отображаются в новое пространство представления;
- способы оценки характеристики шума.
Таким образом, параллельные каналы обнаружения каждой ветви могут выполнять различные обнаружения, и повышается качество принятия решения относительно сигнала тревоги.
Согласно конкретной особенности каждый из первых каналов обнаружения использует быстрое преобразование Фурье, с различной длиной, для представления измерений акустических сигналов в новом пространстве представления, и используют энергию в качестве количественной характеристики сигнала, в которой измерения акустических сигналов отображаются в новое пространство представления.
Это позволяет улучшить обработку частотно-модулированных звуков.
Согласно конкретной особенности каждый второй канал обнаружения выполняет следующие этапы, на которых:
- используют полосовой фильтр с различной полосой пропускания для представления измерений акустических сигналов в новом пространстве представления;
- вычисляют первое и второе отношения сигнал/шум, используя соответственно первую и вторую количественные характеристики сигнала, в которых измерения акустических сигналов отображаются в новое пространство представления, причем первая и вторая количественные характеристики сигнала связаны статистикой различного порядка; и
- выбирают максимальное отношение среди первого и второго отношений сигнал/шум, которое будет использоваться на этапе выбора второго канала обнаружения, имеющего максимальное отношение сигнал/шум.
Это позволяет улучшить обработку импульсных звуков.
Согласно конкретной особенности упомянутая первая количественная характеристика сигнала представляет собой энергию, связанную со второй статистикой порядков, и упомянутая вторая количественная характеристика сигнала представляет собой эксцесс, связанный с четвертой статистикой порядка.
Это позволяет дополнительно улучшить обработку импульсных звуков.
Согласно конкретной особенности, по меньшей мере, одна из упомянутых первой и второй ветвей содержит:
- этап обучения, выполненный с возможностью определения отклоненных точек в частотно-временной сетке в зависимости от множества последовательных фактически обнаруженных звуков; и
- этап отклонения, выполненный с возможностью отклонения фактически обнаруженного звука, который расположен на частотно-временной сетке, на одной из отклоненных точек; и
- этап принятия решения относительно сигнала тревоги выполняется в зависимости от звука или звуков фактически обнаруженных и неотклоненных.
Это позволяет идентифицировать обнаружение абиотических звуков (например, обусловленных сейсмическим устройством) и отклонить их.
Согласно конкретной особенности упомянутый этап обучения содержит следующие этапы для, по меньшей мере, одной заданной точки частотно-временной сетки, на которых:
- получают число фактически обнаруженных звуков, которые отображаются на упомянутой заданной точке частотно-временной сетки среди множества последовательных фактически обнаруженных звуков сверх определенного числа итераций;
- обнаруживают, что заданная точка частотно-временной сетки представляет собой отклоненную точку, если упомянутое число выше, чем определенный порог.
Это позволяет улучшить этап обучения.
Согласно конкретной особенности способ осуществляется в реальном времени в упомянутом устройстве обнаружения, и он содержит этап, на котором передают упомянутое решение относительно сигнала тревоги в удаленное устройство управления.
В другом варианте осуществления изобретение относится к компьютерному программному продукту, содержащему инструкции программного кода для осуществления вышеупомянутого способа (в любом из этих различных вариантов осуществления), когда упомянутая программа исполняется на компьютере или процессором.
В другом варианте осуществления изобретение относится к невременному машиночитаемому носителю информации, хранящему программу, которая, при исполнении на компьютере или процессором, побуждает компьютер или процессор выполнять вышеупомянутый способ (в любом из различных вариантов осуществления).
Конкретный вариант осуществления изобретения предусматривает устройство обнаружения для автоматического обнаружения морских животных, содержащее:
- средство для получения измерений акустических сигналов, собранных с помощью, по меньшей мере, одного акустического датчика в подводной среде;
- по меньшей мере, одно из следующих средств обработки:
- первое средство обработки с возможностью обнаружения частотно-модулированных звуков, и содержащее: несколько первых средств, включенных параллельно, для обнаружения, каждое из которых имеет различное и фиксированное значение для, по меньшей мере, одной степени свободы; средство для выбора первого средства для обнаружения, имеющее максимальное отношение сигнал/шум; и средство для сравнения отношения сигнал/шум, выбранного первого средства для обнаружения с первым определенным порогом;
- второе средство обработки с возможностью обнаружения импульсных звуков и содержащее: несколько вторых средств, включенных параллельно, для обнаружения, каждое из которых имеет различное и фиксированное значение для, по меньшей мере, одной степени свободы; средство для выбора второго средства для обнаружения, имеющее максимальное отношение сигнал/шум; и средство для сравнения отношения сигнал/шум выбранного второго средства для обнаружения со вторым определенным порогом;
- средство для принятия решения относительно сигнала тревоги, показывающего присутствие, по меньшей мере, одного морского животного, в зависимости от выходного сигнала первого средства обработки и/или выходного сигнала второго средства обработки.
5. Перечень чертежей
Другие особенности и преимущества вариантов осуществления изобретения будут очевидны из следующего описания, приведенного посредством показательных и неисчерпывающих примеров и из прилагаемых чертежей, на которых:
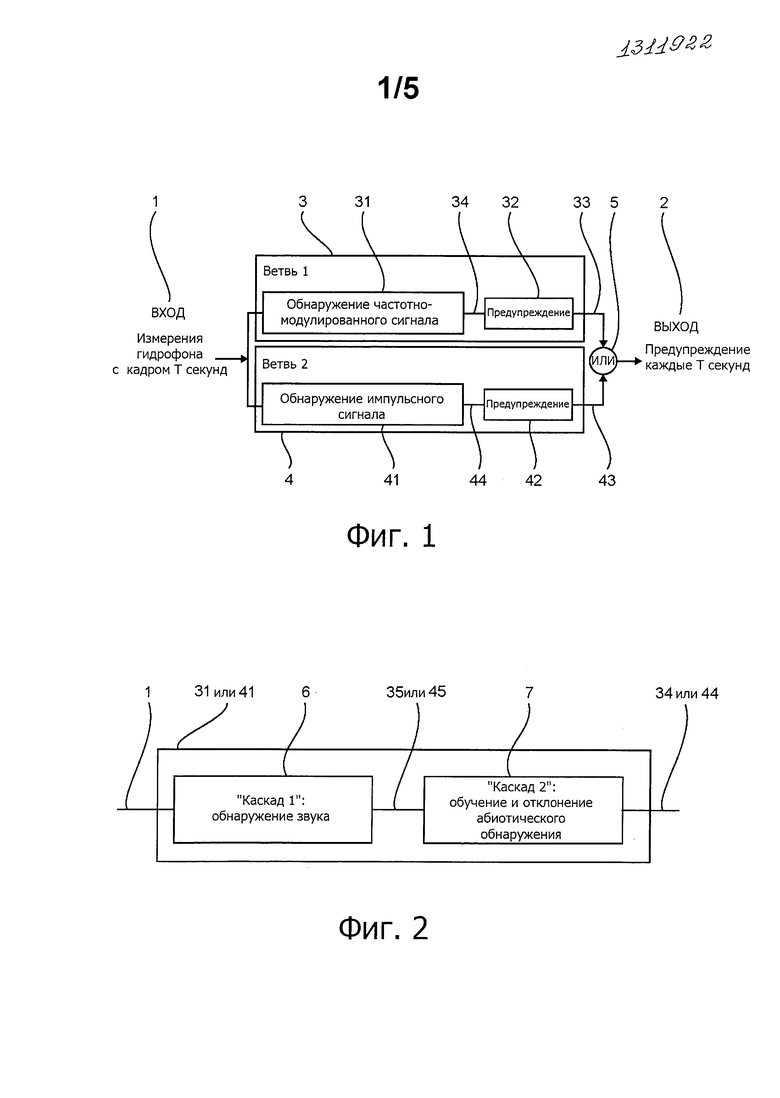
фигура 1 - схематичная иллюстрация способа обнаружения согласно конкретному варианту осуществления изобретения, содержащего ветвь для частотно-модулированных звуков и ветвь для импульсных звуков;
фигура 2 - обобщенная иллюстрация блока обнаружения, который содержится в каждой из ветвей, показанных на фигуре 1, и который содержит каскад обнаружения и каскад обучения и отклонения;
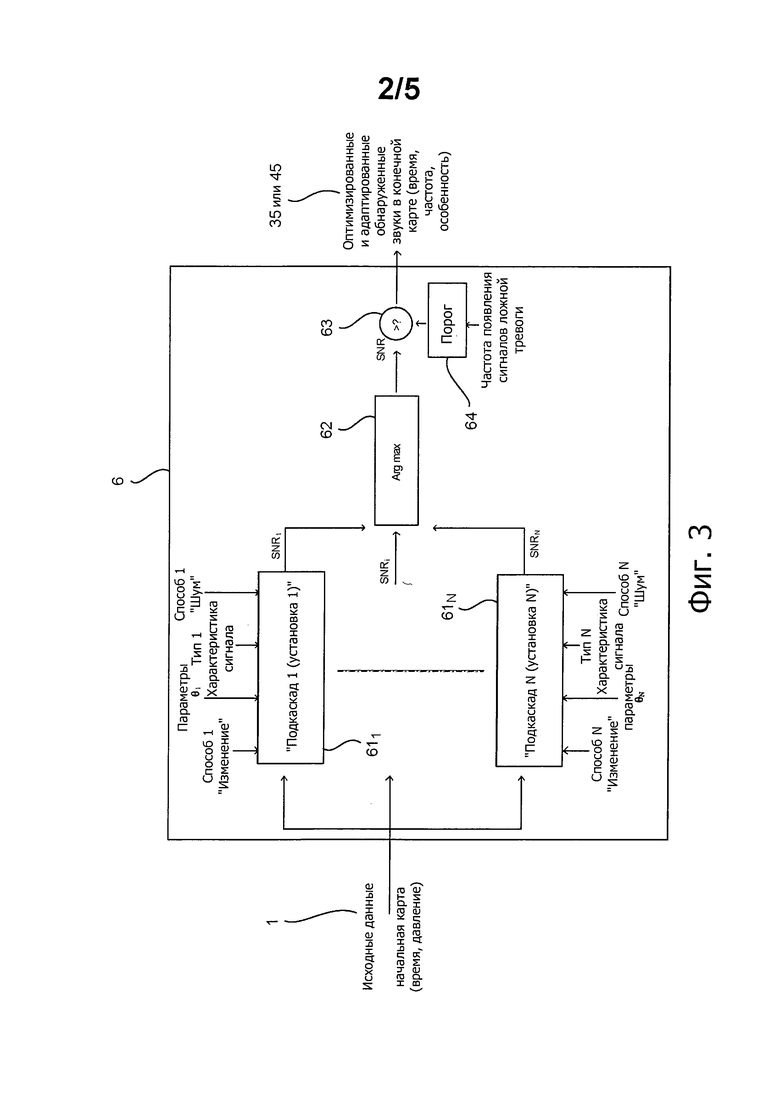
фигура 3 - обобщенная иллюстрация каскада обнаружения, показанного на фигуре 2;
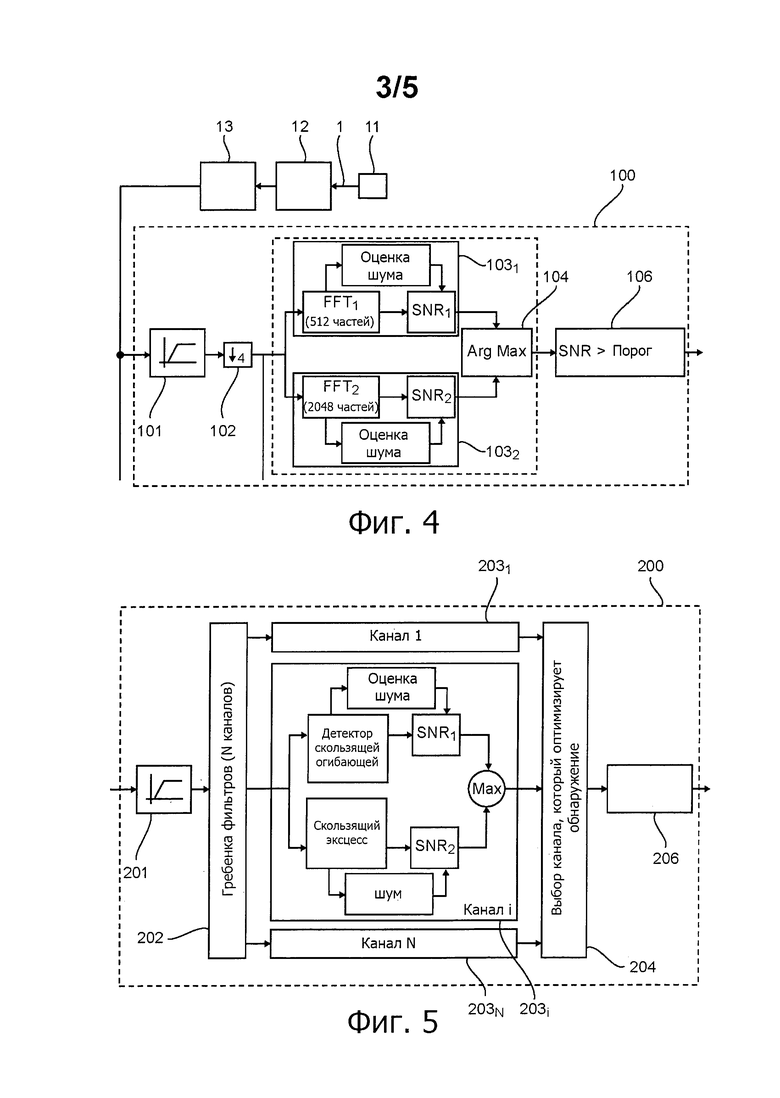
фигура 4 - схематичная иллюстрация конкретного варианта осуществления каскада обнаружения, который содержится в ветви для частотно-модулированных звуков;
фигура 5 - схематичная иллюстрация конкретного варианта осуществления каскада обнаружения, который содержится в ветви для импульсных звуков;
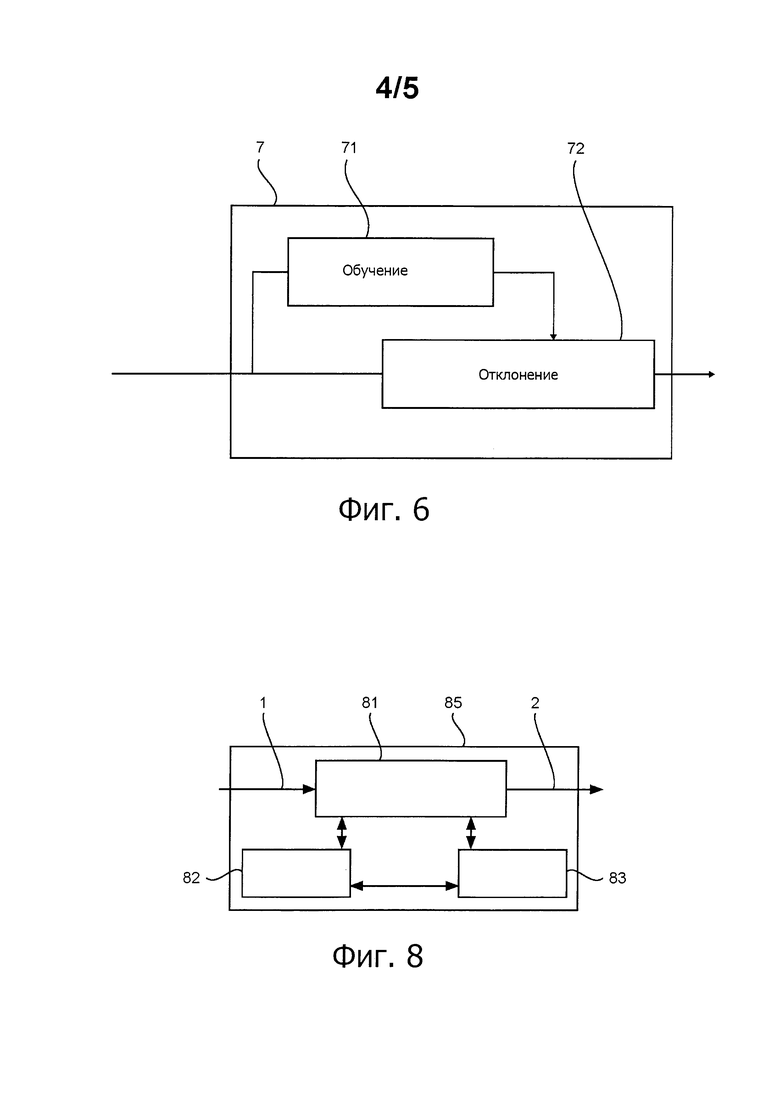
фигура 6 - обобщенная иллюстрация каскада обучения и отклонения, показанного на фигуре 2;
фигура 7 - схематичная иллюстрация конкретного варианта обучения и отклонения, показанного на фигуре 2;
фигура 8 - упрощенная структура устройства обнаружения согласно конкретному варианту осуществления настоящего изобретения.
6. Подробное описание изобретения
На всех фигурах настоящего документа идентичные элементы и этапы обозначены одинаковыми числовыми ссылочными позициями.
В примере, описанном выше, рассматривается обнаружение присутствия морских животных, включая китообразных (усатых китов и зубатых китов).
Со ссылкой на фигуру 1, представлен способ обнаружения согласно конкретному варианту осуществления изобретения.
Вход 1 состоит из результатов измерений (уровней звукового давления), собранных акустическим датчиком (например, датчиком давления (гидрофоном) или датчиком движения частиц (геофоном или акселерометром), встроенных, например, в стандартные инструментальные средства для геофизической съемки (пневмопушка, сейсмические косы и т.д.). Как показано на фигуре 4, результаты измерений, полученные акустическим датчиком 11, перед подачей в две ветви 3 и 4, например, усиливаются с помощью предусилителя 12 с переменным коэффициентом усиления, затем преобразуются в цифровую форму с помощью аналого-цифрового преобразователя (АЦП) 13.
Выход 2 схемы представляет собой предупреждение, которое информирует о присутствии некоторых морских животных в диапазоне обнаружения акустического датчика.
Входной сигнал (данные измерений) обрабатывается с периодом кадра Т секунд, поэтому обнаружение и предупреждение имеют частоту дискретизации, равную Т секундам.
Если способ осуществляется в реальном времени в устройстве обнаружения, то он содержит этап передачи окончательного решения о сигнале тревоги в удаленное устройство управления.
Процесс разделен на две ветви - одна (поз.3) для обработки частотно-модулированных звуков (звуки усатых китов, свисты зубатых китов) и другая (поз.4) для обработки импульсных звуков (щелчков зубатых китов).
Каждая ветвь (3 или 4) содержит блок обнаружения (поз.31 или 41, подробно описаны ниже) для обнаружения и блок предупреждения (поз.32 или 42).
Блок предупреждения поз.32 принимает первое промежуточное решение 33 о сигнале тревоги, указывающем на присутствие, по меньшей мере, одного морского животного, в виде функции от частотно-модулированного звука или звуков 34, фактически обнаруженных блоком обнаружения поз.31.
Блок предупреждения поз.42 принимает второе промежуточное решение 43 о сигнале тревоги, указывающем на присутствие, по меньшей мере, одного морского животного, в виде функции от импульсного звука или звуков 44, фактически обнаруженных блоком обнаружения поз.41.
Окончательное решение о сигнале тревоги (то есть выход 2) представляет собой функцию (в этом примере логическую функцию "ИЛИ") первого и второго промежуточных решений 33 и 43 о сигнале тревоги.
Работу каждого блока 32, 42 предупреждения можно кратко описать следующим образом. На первом этапе блок предупреждения объединяет несколько отдельных обнаруженных звуков (для блока 32 предупреждения: свисты из блока 31 обнаружения; для блока 42 предупреждения: щелчки из блока 41 обнаружения) в одну метрику обнаружения. Метрику обнаружения можно определить с помощью оператора, как, например: долю контрольного интервала рабочего времени, которая составляет время, занимаемое свистами или щелчками; или количество событий (свистов или щелчков), обнаруженных в контрольном интервале рабочего времени. Затем временной ряд метрики обнаружения сравнивается с порогом (жестким или мягким). Каждый раз, когда метрика становится больше, чем порог, объявляется предупреждение об обнаружении.
Как показано на фигуре 2, каждый из блоков 31 и 41 обнаружения содержит каскад 6 обнаружения (который также называется "каскадом 1") для обнаружения звука (смотри ниже описание фигур 3, 4 и 5), и каскад 7 обучения и отклонения (который также называется "каскадом 2"), который будет описан ниже для обучения и отклонения адиабатических звуков (смотри ниже описание фигур 6 и 7). Выходной сигнал каскада 6 обнаружения обозначен поз.35 (для ветви поз.3) или поз.45 (для ветви 4). Выходной сигнал каскада 7 обучения и отклонения представляет собой выходной сигнал каскада 6 обнаружения и, как уже было упомянуто выше, обозначен поз.34 (для ветви поз.3) или поз.44 (для ветви 4).
На фигуре 3 изображена обобщенная иллюстрация каскада 6 обнаружения, показанного на фигуре 2. В основном он содержит:
- N параллельных каналов обнаружения, обозначенных 611-61N (которые также называются "подкаскадом i (установка i)", где i - целое число от 1 до N, N - целое число больше 1);
- блок 62 для динамического выбора в каждый период времени (то есть для каждого периода Т) канала обнаружения, который оптимизирует выходной сигнал SNR (отношение сигнал/шум);
- блок 63 для выполнения обнаружения только по отношению к выбранному каналу путем сравнения SNR выбранного канала с определенным порогом 64 (вычисленным из теоретического предположения и максимально приемлемой частоты появления сигналов ложной тревоги).
Каждый из N каналов обнаружения состоит из первой операции в настоящих измерениях в новом пространстве представления (в основном, время и частота) и, в этом новом пространстве представления, отображается количественная характеристика звуков. Как пространство представления, так и характеристика сигнала выбираются для отделения, по возможности, самого лучшего полезного сигнала от шума. Затем в этом новом пространстве представления выполняется обнаружение путем оценки локального SNR, где шум оценивается исходя из полученных карт измерений.
Для того чтобы адаптировать к большому диапазону полезных форм сигналов и шумовых характеристик, каждый из N каналов обнаружения имеет различное и фиксированное значение для одной или нескольких степеней свободы:
- способ и его параметры установки (параметры) 9 для изменения пространства представления, (т.е. для представления измерений акустических сигналов в новом пространстве представления),
- количественная характеристика сигнала, в которой отражены обработанные данные, в новом пространстве представления, и
- способ оценки шумовой характеристики.
После того как эти степени свободы выбраны, каждый канал обнаружения оптимизируется для одного типа полезного сигнала и одного типа шума.
Необходимо иметь ввиду, что значение SNR только перед окончательным обнаружением (то есть выходной сигнал блока 62 и входной сигнал блока 63) представляет собой индикатор оптимальности выбора степеней свободы.
Эту инновационную общую схему, подробно описанную со ссылкой на фигуры 1 и 2, можно применить и осуществить, например, в процессоре цифровых сигналов (DSP) для двух каналов данного обнаружителя.
Более конкретно, можно считать, что эта инновационная общая схема может быть осуществлена в равной степени хорошо:
- путем исполнения набора компьютерных инструкций, исполняемых с помощью перепрограммируемой вычислительной машины, такой как устройство типа PC, DSP или микроконтроллер; или еще
- с помощью специализированных аппаратных средств или компонентов, таких как программируемая логическая матрица типа FPGA (FPGA), специализированная интегральная схема (ASIC), или любого другого аппаратного модуля.
В случае если решение осуществляется в перепрограммируемой вычислительной машине, соответствующую программу (то есть набор инструкций) можно хранить на невременном машиночитаемом носителе информации, который является съемным (например, гибкий диск, CD-ROM или DVD-ROM) или несъемным.
На фигуре 8 показана упрощенная структура устройства обнаружения согласно конкретному варианту осуществления изобретения с осуществлением на DSP. Устройство 85 для автоматического обнаружения морских животных содержит DSP 81, постоянное запоминающее устройство (ПЗУ) 82 или оперативное запоминающее устройство (ОЗУ) 83. Постоянное запоминающее устройство 82 хранит исполняемый код программ, которые при их исполнении DSP обеспечивают осуществление инновационной общей схемы, подробно описанной выше со ссылкой на фигуры 1 и 2. После инициирования вышеупомянутые инструкции программного кода передаются в память 83 с произвольным доступом для их исполнения DSP 81. Память 83 с произвольным доступом также включает в себя регистры для хранения переменных и параметров, требуемых для исполнения. DSP 81 принимает сигналы измерений (уровни звукового давления) (то есть входной сигнал 1) и выдает окончательное решение о сигнале тревоги (то есть выходной сигнал 2).
На фигуре 4 изображена схематическая иллюстрация конкретного варианта осуществления (подход на основе алгоритма "мульти-БПФ") каскада 100 обнаружения, который содержится в ветви 3 для частотно-модулированных звуков.
В этом варианте осуществления каскад 100 обнаружения содержит:
- фильтр 101 нижних частот;
- прореживатель 102 с коэффициентом прореживания, равным 4;
- два (N=2) параллельных канала 1031 и 1032 обнаружения, длины БПФ которых равны 512 и 2048 соответственно. Конечно, число N может быть больше 2.
- блок 104 для динамического выбора в каждый период времени (то есть для каждого периода Т) канала обнаружения, который оптимизирует выходной сигнал SNR (отношение сигнал/шум);
- блок 106 для выполнения обнаружения только по отношению к выбранному каналу путем сравнения SNR выбранного канала с определенным порогом.
Как упомянуто выше, если способ осуществляется в реальном времени в устройстве обнаружения, он содержит этап передачи окончательного решения о сигнале тревоги в удаленное устройство управления. Например, в контексте сбора сейсмических данных в морской среде устройство обнаружения может содержаться в морской буксируемой косе (датчики распределены вдоль кабелей, чтобы сформировались линейные акустические антенны, которые обычно называются "морскими буксируемыми косами" или "сейсмическими косами"; сеть сейсмических кос буксируется сейсмическим судном). При этих ограничивающих условиях обработки сигнала в реальном времени невозможно использовать слишком большую длину БПФ, которая повлечет за собой слишком продолжительный период времени подачи из устройства обнаружения в устройство управления. Пара длин БПФ, равных 512 и 2048, позволяет снять ограничение на обработку сигнала в реальном времени.
Каждый из N каналов обнаружения каскада обнаружения определяется следующим образом:
- способ изменения пространства представления представляет собой быстрое преобразование Фурье (БПФ) с длиной L БПФ, выбранной в качестве параметров установки;
- характеристика сигнала (в которой измерения акустических сигналов отображаются в новое пространство представления) представляет собой энергию; и
- способ оценки шума представляет собой фильтр нижних частот первого порядка с бесконечной импульсной характеристикой.
В альтернативном варианте осуществления способ изменения пространства представления не является быстрым преобразованием Фурье (БПФ), а представляет собой способ частотно-временного отображения из следующего перечня (неисчерпывающего): переход через нуль, декомпозиция на эмпирические моды (ДЭМ), гребенка фильтров или вейвлетное преобразование.
На фигуре 5 изображена схематичная иллюстрация конкретного варианта осуществления (подход на основе "гребенки фильтра с многоразрядной статистикой") каскада 200 обнаружения, который содержится в ветви 4 для импульсных звуков.
В этом варианте осуществления каскад 200 обнаружения содержит:
- фильтр 201 высоких частот;
- гребенка 202 N (например, N=6) полосовых фильтров, работающих параллельно для представления измерения акустических сигналов в новом пространстве представления;
- N параллельных каналов 2031-203N обнаружения. Каждый канал обнаружения вычисляет первое и второе SNR (отношение сигнал/шум) с использованием соответственно первой и второй количественной характеристики сигнала, в которой измерения акустических сигналов отображаются в новое пространство представления. Максимум между первым и вторым SNR выбирается для рассматриваемого канала обнаружения. Первая и вторая количественные характеристики сигнала связаны со статистикой различного порядка. В предпочтительном варианте осуществления количественная характеристика сигнала представляет собой энергию, связанную со статистикой второго порядка, и вторая количественная характеристика сигнала представляет собой эксцесс, связанный со статистикой четвертого порядка. Способ оценки шума представляет собой один фильтр нижних частот первого порядка с бесконечной импульсной характеристикой. В альтернативных вариантах осуществления пару (энергия и эксцесс) можно изменить на любую другую пару, содержащую два элемента из следующего списка (неисчерпывающего): энергия, асимметрия, эксцесс и альфа-стабильный параметр.
- блок 204 для динамического выбора в каждый период времени (то есть для каждого периода Т) канала обнаружения, который оптимизирует выходное SNR (отношение сигнал/шум);
- блок 206 для выполнения обнаружения только по отношению к выбранному каналу путем сравнения SNR выбранного канала с определенным порогом.
Ниже, со ссылкой на фигуру 6 и 7, приводится описание конкретного варианта осуществления каскада 7 обучения и отклонения, показанного на фигуре 2.
Каскад 100 обнаружения (подход на основе алгоритма "мульти-БПФ", показанный на фигуре 4), который содержится в ветви 3 для частотно-модулированных звуков, и каскад 200 обнаружения (подход на основе "гребенки фильтров с многоразрядной статистикой", показанный на фигуре 5), который содержится в ветви 4 для импульсных звуков, оптимизируют скорость обнаружения любого звука, измеренного с помощью акустического датчика, каким бы то ни был характер источника.
Однако устройство пассивного обнаружения (например, встроенного в стандартное геофизическое инструментальное средство) будет сталкиваться с большим количеством абиотических звукообразований, вырабатываемых самим инструментальным средством. Их обнаружение является истинным обнаружением звука, но ложным обнаружением морских млекопитающих.
Для того чтобы уменьшить частоту появления сигналов ложной тревоги из-за абиотических звуков, в каждой из ветвей 3 и 4 добавлен каскад 7 обучения и отклонения для обучения того, что из себя представляют эти обнаружения абиотических звуков и как устранить их. Каскад 7 обучения и отклонения содержит:
- блок 71 обучения, выполненный с возможностью определения отклоненных точек частотно-временной сетки в зависимости от множества последовательных фактически обнаруженных звуков; и
- блок 72 отклонения, выполненный с возможностью отклонения фактически обнаруженного звука, который расположен в частотно-временной сетке, в одной из отклоненных точек.
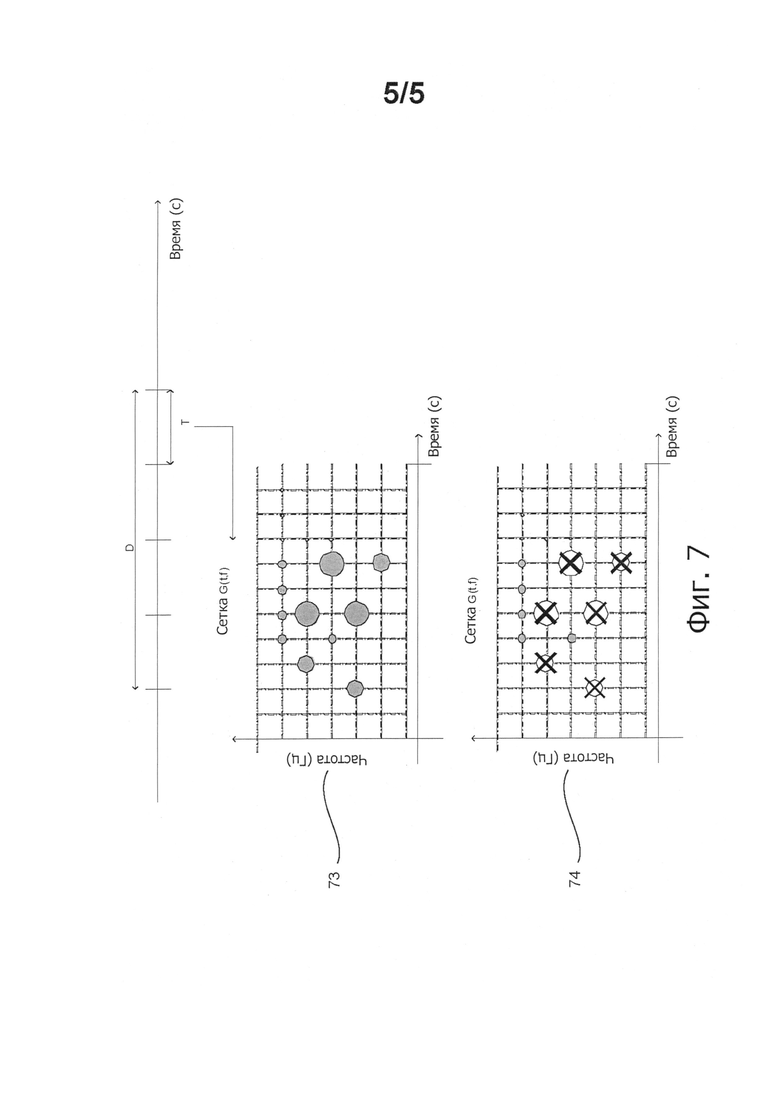
Блок 71 обучения использует реалистическое предположение, что обнаружение абиотических звуков является обычным явлением, тогда как обнаружение морских млекопитающих является редким явлением. Период кадра рабочего времени с длиной Т является определенным. На этом периоде Т каскад 6 обнаружения звука (то есть каскад 100 обнаружения для ветви 3, обрабатывающий частотно-модулированные звуки, и каскад 200 обнаружения для ветви 4, обрабатывающий импульсные звуки) отображает сигнал на частотно временной сетке. Допустим, что G(t,f) это сетка. По мере течения времени число обнаружений для каждой точки сетки G(t,f) суммируется с помощью памяти D с нулевым пренебрежимо малым временем выборки и делится на общее число итераций, которое содержится в D, чтобы получить вероятность того, что одна точка сетки представляет собой ложную тревогу из-за абиотических звуков. Блок 71 обучения принимает решение относительно того, что заданная точка частотно-временной сетки представляет собой отклоненную точку, если ассоциативная вероятность выше предварительно заданного порога.
В сетке 73, показанной сверху на фиг.7, размер кружочка, расположенного на заданной точке сетки, пропорционален вероятности того, что эта заданная точка является ложной тревогой из-за абиотических звуков (то есть размер кружочка пропорционален числу фактически обнаруженных звуков, которые расположены на этой точке сетки).
В сетке 74, показанной в нижней части фигуры 7, точки сетки, отмеченные крестиками, представляют собой отклоненные точки, которые будут использоваться блоком 72 отклонения для принятия решения относительно того, необходимо или нет отклонить фактически обнаруженный звук.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ВЫКЛЮЧЕНИЯ ОТКЛЮЧАЮЩЕГО БЛОКА И ЭЛЕКТРИЧЕСКИЙ ШКАФ, СОДЕРЖАЩИЙ ТАКОЕ УСТРОЙСТВО | 2021 |
|
RU2836151C2 |
| ПАССИВНО-АКТИВНЫЙ АКУСТИЧЕСКИЙ МЕТОД ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ УТЕЧЕК ГАЗА В ГАЗОЖИДКОСТНОЙ СРЕДЕ | 2015 |
|
RU2584721C1 |
| СПОСОБ И УСТРОЙСТВО УЛУЧШЕНИЯ РЕЧЕВОГО СИГНАЛА С ИСПОЛЬЗОВАНИЕМ БЫСТРОЙ СВЕРТКИ ФУРЬЕ | 2022 |
|
RU2795573C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ИСТОЧНИКА ЗВУКА | 2012 |
|
RU2593620C2 |
| Способ гидроакустического поиска автономного донного подводного объекта | 2019 |
|
RU2727331C1 |
| СПОСОБ И СИСТЕМА ДЛЯ АКУСТИЧЕСКОГО АНАЛИЗА МАШИНЫ | 2014 |
|
RU2669128C2 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ДЛЯ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ УТЕЧЕК ГАЗА | 2015 |
|
RU2592741C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБЕСПЕЧЕНИЯ ИНФОРМИРОВАННОЙ ОЦЕНКИ ВЕРОЯТНОСТИ И ПРИСУТСТВИЯ МНОГОКАНАЛЬНОЙ РЕЧИ | 2012 |
|
RU2642353C2 |
| СПОСОБ ДЛЯ АВТОМАТИЗИРОВАННОЙ РЕГИСТРАЦИИ В РЕАЛЬНОМ ВРЕМЕНИИ МОРСКИХ МЛЕКОПИТАЮЩИХ | 2012 |
|
RU2546548C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВЕСТНИКА ЦУНАМИ | 2011 |
|
RU2457514C1 |
Способ автоматического обнаружения морских животных, выполняемый с помощью устройства обнаружения: этап получения измерений (1) акустических сигналов, собранных с помощью, по меньшей мере, одного акустического датчика в подводной среде; по меньшей мере, одну из первой ветви (3) для обнаружения частотно-модулированных звуков и второй ветви (4) для обнаружения импульсных звуков; причем каждая ветвь содержит этап обнаружения звуков с помощью: реализации параллельно нескольких каналов обнаружения, каждый из которых имеет различное фиксированное значение, по меньшей мере, для одной степени свободы; выбора канала обнаружения, имеющего максимальное отношение сигнал/шум; и сравнения отношений сигнал/шум выбранного канала обнаружения с установленным порогом; этап (32, 42, 5) принятия решения о сигнале тревоги, указывающем на присутствие, по меньшей мере, одного морского животного, в зависимости от выходного сигнала первой ветви и/или выходного сигнала второй ветви. 3 н. и 7 з.п. ф-лы, 8 ил.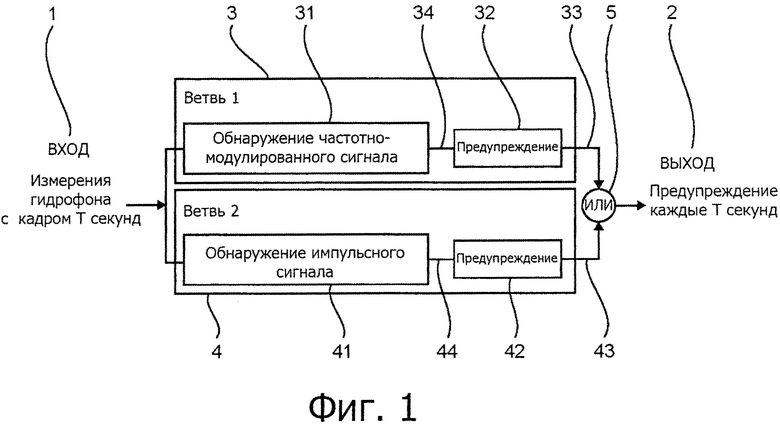
1. Способ автоматического обнаружения морских животных, характеризующийся тем, что он выполняется с помощью устройства (85) обнаружения и содержит
этап получения измерений (1) акустических сигналов, собранных с помощью, по меньшей мере, одного акустического датчика в подводной среде;
по меньшей мере, одну из следующих ветвей:
- первая ветвь (3), содержащая этап (31) обнаружения частотно-модулированных звуков путем
реализации параллельно нескольких первых каналов (1031-1032) обнаружения,
выбора (104) первого канала обнаружения, имеющего максимальное отношение сигнал/шум, и
сравнения (106) отношения сигнал/шум выбранного первого канала обнаружения с первым определенным порогом;
- вторая ветвь (4), содержащая этап (41) обнаружения импульсных звуков путем реализации параллельно нескольких вторых каналов (2031-203N) обнаружения, выбора (204) второго канала обнаружения, имеющего максимальное отношение сигнал/шум, и
сравнения (206) отношения сигнал/шум выбранного второго канал обнаружения со вторым определенным порогом;
- этап (32, 42, 5) принятия решения о сигнале тревоги, указывающем на присутствие, по меньшей мере, одного морского животного, в зависимости от выходного сигнала первой ветви и/или выходного сигнала второй ветви,
при этом каждый первый или второй канал обнаружения содержит:
представление измерений акустических сигналов в новом пространстве представления, причем новое пространство представления обеспечивает частотно-временное представление;
в указанном новом пространстве представления оценивают отношение (SNR1, SNRi, SNRN) сигнал/шум;
при этом каждый первый или второй канал обнаружения имеет различное и фиксированное значение, по меньшей мере, для одной степени свободы, принадлежащей к группе, включающей в себя:
способы и соответствующие параметры для представления измерений акустических сигналов в новом пространстве представления;
количественные характеристики сигнала, с которыми измерения акустических сигналов отображаются в новом пространстве представления;
способы оценки характеристики шума.
2. Способ по п. 1, отличающийся тем, что содержит указанную первую ветвь и указанную вторую ветвь.
3. Способ по п. 1 или 2, отличающийся тем, что каждый из первых каналов обнаружения использует быстрое преобразование Фурье с различной длиной для представления измерений акустических сигналов в новом пространстве представления и использует энергию в качестве количественной характеристики сигнала, с которой измерения акустических сигналов отображаются в новом пространстве представления.
4. Способ по п. 1, отличающийся тем, что каждый из вторых каналов обнаружения выполняет этапы, на которых:
используют полосовой фильтр с различной полосой пропускания для представления измерений акустических сигналов в новом пространстве представления;
вычисляют первое и второе отношения сигнал/шум с использованием, соответственно, первой и второй количественных характеристик сигнала, с которыми измерения акустических сигналов отображаются в новом пространстве представления, причем упомянутая первая и вторая количественные характеристики сигнала связаны со статистикой различного порядка; и
выбирают максимальное отношение из первого и второго отношений сигнал/шум, которые используются на этапе выбора второго канала обнаружения, имеющего максимальное отношение сигнал/шум.
5. Способ по п. 4, отличающийся тем, что упомянутая первая количественная характеристика сигнала представляет собой энергию, связанную со статистикой второго порядка, а упомянутая вторая количественная характеристика сигнала представляет собой эксцесс, связанный со статистикой четвертого порядка.
6. Способ по п. 1, отличающийся тем, что, по меньшей мере, одна из упомянутых первой и второй ветвей содержит:
этап (71) обучения, адаптированный к определению отклоненных точек в частотно-временной сетке в зависимости от множества последовательных фактически обнаруженных звуков; и
этап (72) отклонения, адаптированный к отклонению фактически обнаруженного звука, который располагается в частотно-временной сетке на одной из отклоненных точек;
при этом этап принятия решения о сигнале тревоги выполняют в зависимости от звука или звуков, фактически обнаруженных и не отклоненных.
7. Способ по п. 6, отличающийся тем, что этап (71) обучения содержит этапы, по меньшей мере, для одной заданной точки частотно-временной сетки, на которых:
получают число фактически обнаруженных звуков, которые отображаются на упомянутой заданной точке частотно-временной сетки, из множества последовательных фактически обнаруженных звуков сверх установленного числа итераций;
принимают решение о том, что заданная точка частотно-временной сетки представляет собой отклоненную точку, если упомянутое число выше установленного порога.
8. Способ по п. 1, отличающийся тем, что его осуществляют в реальном времени в упомянутом устройстве обнаружения, при этом способ содержит этап передачи упомянутого решения о сигнале тревоги в удаленное устройство управления.
9. Машиночитаемый носитель информации, хранящий набор инструкций, исполнение которых на компьютере или процессором вызывает выполнение компьютером или процессором способа, по меньшей мере, по одному из пп. 1-8.
10. Устройство (85) обнаружения для автоматического обнаружения морских животных, характеризующееся тем, что содержит:
средство для получения измерений акустических сигналов, собираемых, по меньшей мере, одним акустическим датчиком в подводной среде;
по меньшей мере, одно из следующих средств обработки:
- первое средство обработки данных, выполненное с возможностью обнаружения частотно-модулированных звуков и содержащее:
несколько параллельных первых средств для обнаружения,
средство для выбора указанного первого средства для обнаружения, имеющего максимальное отношение сигнал/шум; и
средство для сравнения величины отношения сигнал/шум выбранного первого средства для обнаружения с величиной первого установленного порога;
- второе средство обработки данных, выполненное с возможностью обнаружения импульсных звуков и содержащее:
несколько параллельных вторых средств для обнаружения,
средство для выбора указанного второго средства для обнаружения, имеющего максимальное отношение сигнал/шум; и
средство для сравнения величины отношения сигнал/шум выбранного второго средства для обнаружения с величиной второго установленного порога;
средство для принятия решения о сигнале тревоги, указывающем на присутствие, по меньшей мере, одного морского животного, в зависимости от выходного сигнала указанного первого средства обработки данных и/или выходного сигнала указанного второго средства обработки данных,
при этом каждое первое или второе средство обнаружения содержит:
средство для представления измерений акустических сигналов в новом пространстве представления, причем новое пространство представления обеспечивает частотно-временное представление;
средство для оценки отношения (SNR1, SNRi, SNRN) сигнал/шум в указанном новом пространстве представления;
при этом каждое первое или второе средство обнаружения имеет различное и фиксированное значение, по меньшей мере, для одной степени свободы, принадлежащей к группе, включающей в себя:
способы и соответствующие параметры для представления измерений акустических сигналов в новом пространстве представления;
количественные характеристики сигнала, с которыми измерения акустических сигналов отображаются в новом пространстве представления;
способы оценки характеристики шума.
| Nancy DiMarzio et.al | |||
| "Passive acoustic measurement of dive vocal behavior and group size of Blainville’?s beaked whale (Mesoplodon densirostris) in the tongue of the ocean (TOTO) | |||
| Sylvain Busson | |||
| "Statistical underwater noise level estimation for marine mammal whistle detection" | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

