Область техники, к которой относится изобретение
Настоящее изобретение относится к устройствам для регулирования предварительного напряжения упругих средств, в особенности предварительного напряжения пружины, применяемой для регулирования высоты положения веса и облегчающей силы, действующей на этот вес, в особенности на вес пациента в средствах тренировки передвижения, предназначенных для лечебной ходьбы пациентов с парапарезом и гемипарезом. Другими словами, изобретение в общем относится к автоматическим регулирующим устройствам для отклонения пружины с ее предварительным напряжением в рабочей точке, а в особенности к автоматическим разгрузочным устройствам, позволяющим разгрузить объект, присоединенный к одному из концов веревки, точной противодействующей силой. В особенности изобретение относится к устройству и способу, которые могут быть применены для тренировки передвижения в любой фазе реабилитации пациентов с нарушениями функции ходьбы.
Уровень техники
Как отмечено выше, указанный тип разгрузочных систем может быть использован в различных применениях, но в особенности предназначен для использования на тренажере «бегущая дорожка» с опорой веса тела. Такой тип тренажа применяется, например, для тренировки неврологических больных в процессе реабилитации их способности к ходьбе. Для таких больных с неполной параплегией имеется возможность улучшения их способности к ходьбе вплоть до нормализации с помощью адекватной тренировки передвижения. Необходимое лечение в настоящее время осуществляется на тренажере «бегущая дорожка», в котором ходьба становится возможной для пациента прежде всего благодаря определенному облегчению веса и отчасти благодаря дополнительной помощи физиотерапевта, направляющего ноги пациента (Wickelgren, I. Teaching the spinal cord to walk. Science, 1998, 279, 319-321).
При реабилитации пациентов с ограниченными движениями ног или после ортопедических операций в настоящее время применяются различные ортопедические устройства с приводами, активно двигающие ногами лежачего пациента. В процессе тренировки на тренажере «бегущая дорожка» с опорой веса тела, пациент шагает на тренажере, находясь в частично подвешенном состоянии; эта подвеска освобождает его от части веса его тела.
В документе ЕР 1137378 описана автоматическая машина, применяемая при терапии на тренажере «бегущая дорожка» (лечебной ходьбе) пациентов с парапарезом и гемипарезом, причем эта машина автоматически направляет ноги на тренажере. Упомянутая машина включает снабженное приводом и управляемое ортопедическое устройство, направляющее ноги пациента в соответствии с физиологической кинематикой движения, тренажер «бегущая дорожка» и облегчающий механизм. Как коленное, так и бедренное сочленения ортопедического устройства снабжены приводами. Упомянутое ортопедическое устройство стабилизировано на тренажере «бегущая дорожка» стабилизирующими средствами таким образом, что пациенту не приходится самому поддерживать равновесие. Это ортопедическое устройство регулируется по высоте и может быть адаптировано к конституциональным различиям пациентов.
Разгрузка осуществляется с помощью противовеса, прикрепленного к другому концу веревки, соединенной с пациентом посредством подвески. Это по определению простой способ, который зачастую обеспечивает приемлемые результаты регулярной тренировки на тренажере «бегущая дорожка». Однако применение этого способа в данном виде лечения имеет некоторые недостатки. Один из недостатков проявляется в том случае, когда пациент должен быть освобожден от значительной части веса своего тела. Если к другому концу веревки должна быть прикреплена значительная масса, инерция этой массы вызывает значительные силы при ускорении тела вверх и вниз. Кроме того, в большинстве обычных систем противовесов оказывается не очень просто изменить величину разгрузки в процессе тренировки. Либо терапевту, чтобы изменить поддержку, приходится добавлять или снимать веса системы, либо пациента приходится поднимать лебедкой, чтобы подсоединить к системе дополнительные противовесы.
В документе US 5273502 описано устройство, в котором используются два различных средства регулирования длины каната для обеспечения надежного позиционирования устройства по высоте. Далее, еще одним ограничением этого подхода является ограниченная свобода внесения изменений, необходимых в курсе применения программы лечебной ходьбы для конкретного пациента.
В предварительно неопубликованном документе настоящего заявителя ЕР 1586291 предложено решение проблемы регулирования посредством применения электронного управляющего прибора. Однако на рынке существует потребность в оснащении такого рода устройств менее дорогими управляющими приборами.
Поскольку облегчающая сила создается применением пружинных средств, одна из задач настоящего изобретения заключается в описании более простых устройства и способа регулирования изменения предварительного напряжения пружины вблизи ее рабочей точки.
Следующая задача настоящего изобретения заключается в описании устройства, позволяющего более простыми, то есть менее сложными, средствами точно и с малыми временами срабатывания определять высоту положения пациента и облегчающую силу.
Еще одна задача настоящего изобретения заключается в создании механизма, в котором упругие средства с линейной или нелинейной зависимостью силы от пути или от хода тем не менее обеспечивают почти постоянную силу в пределах заданного диапазона перемещения или хода.
В документе US 5273502 описана лебедка в качестве главного средства регулирования длины каната. Это средство регулирования всегда действует на одну и ту же длину каната, что приводит к различию эффектов износа намотанной и ненамотанной частей упомянутого каната, а кроме того, требует наличия мощного двигателя для создания необходимой силы противодействия весу поднимаемого человека.
Еще одна задача настоящего изобретения заключается в описании устройства, позволяющего лучше регулировать высоту положения пациента и обеспечивающего повышение износостойкости соответствующего каната.
Раскрытие изобретения
Настоящее изобретение основано на понимании того, что регулирование пружины предпочтительно осуществлять механическими средствами, избегая применения более сложных управляющих устройств.
Эта задача решается с помощью устройства для регулирования предварительного напряжения упругих средств вблизи предварительно заданного напряженного состояния или положения, в особенности предварительного напряжения упругих средств, используемых для регулирования высоты положения веса и облегчающей силы, действующей на вес. В соответствии с настоящим изобретением параллельно упругим средствам присоединен механический регулирующий узел для предварительного регулирования предварительно заданного напряженного состояния, причем механический регулирующий узел включает подвижную часть, сцепленную с соединительной частью, соединяющей упругие средства с регулирующим узлом, и создающий силовое воздействие элемент, прикрепленный к подвижной части, при этом механический регулирующий узел, при указанном предварительно заданном напряженном состоянии или положении, находится в неустойчивом равновесии, а движение подвижной части таково, что создающий силовое воздействие элемент добавляет регулирующую или компенсирующую силу при отклонении упругих средств от предварительно заданного напряженного состояния или положения.
Устройство для регулирования предварительного напряжения упругих средств вблизи заранее заданного напряженного состояния дает возможность компенсировать вариации силы этих упругих средств, в особенности если упомянутые упругие средства представляют собой пружину. Настоящее изобретение предлагает решение связанной с использованием пружин проблемы изменения положения поддерживаемого веса или подобного рода сил, при этом жесткость пружины, прямо связанная с удлинением пружины, изменяет силу этой пружины. Настоящее изобретение позволяет достичь почти постоянной силы пружины и, по меньшей мере частично, компенсировать этот эффект посредством применения механического регулирующего узла, который соединен в параллель с упомянутыми упругими средствами. Это позволяет осуществлять предварительное регулирование заранее заданного напряженного состояния в некотором диапазоне перемещений.
Такой механический регулирующий узел компенсирует изменения силы, соответствующие изменениям длины пружины, и корректирует предсказуемое изменение силы, действующей на прикрепленный объект.
Упомянутые средства силового воздействия могут создавать крутящий момент благодаря пружине, прикрепленной к коленчатому рычагу, но возможно также прикрепление веса к упомянутой точке прикрепления коленчатого рычага. Важно только, чтобы воздействующая сила возрастала от некоторого начального значения, предпочтительно от 0, когда подвижная часть следует за отклонением соединительной части.
Применения двигателя можно избежать, если известные из уровня техники подъемные средства типа лебедки заменить устройством согласно настоящему изобретению.
В предпочтительном варианте создающий силовое воздействие элемент является элементом, создающим крутящий момент, включающим дополнительные упругие средства, которые своей первой концевой частью прикреплены к подвижной части, в то время как вторая концевая часть дополнительных упругих средств жестко закреплена.
Механический регулирующий узел может включать подвижную часть в виде коленчатого рычага, шарнирно прикрепленного к соединительной части, или части зубчатого колеса, входящей в зацепление с храповиком, жестко прикрепленным к соединительной части, причем первая концевая часть расположена на коленчатом рычаге или на зубчатом колесе в таком месте, что радиус поворота первой концевой части меньше радиуса дуги окружности, описываемой крайней точкой дополнительных упругих средств, а дополнительные упругие средства включают пружину растяжения.
В другом варианте механический регулирующий узел включает подвижную часть в виде коленчатого рычага, шарнирно прикрепленного к соединительной части, или части зубчатого колеса, входящей в зацепление с храповиком, жестко прикрепленным к соединительной части, причем первая концевая часть расположена на коленчатом рычаге или на зубчатом колесе в таком месте, что радиус поворота первой концевой части больше радиуса дуги окружности, описываемой крайней точкой дополнительных упругих средств, а дополнительные упругие средства включают пружину сжатия.
Создающий силовое воздействие элемент предпочтительно представляет собой вес, прикрепленный к плечу рычага.
Упругие средства предпочтительно включают по меньшей мере одну пружину растяжения, или одну нажимную пружину, или тарельчатые пружины.
Создающий силовое воздействие элемент может также включать привод, соединенный с механическим регулирующим узлом для перемещения подвижной части, сцепленной с соединительной частью, и блок управления, который управляет приводом таким образом, чтобы привод добавлял регулирующее или компенсирующее силовое воздействие при отклонении упругих средств от предварительно заданного напряженного состояния или положения.
В устройствах согласно настоящему изобретению, используемых в аппаратах двигательной терапии, применяются два различных средства регулирования длины каната. Одно из них предназначено для регулирования длины каната с целью определения высоты подвешенного веса. Другое предназначено для регулирования длины каната с целью определения облегчающей силы, действующей на подвешенный вес.
В следующем аспекте изобретение предлагает устройство для регулирования высоты положения веса и облегчающей силы, действующей на этот вес, в особенности на вес пациента в средствах тренировки передвижения, предназначенных для лечебной ходьбы пациентов с парапарезом и гемипарезом, содержащее описанное выше устройство для регулирования предварительного напряжения упругих средств. Согласно изобретению указанный вес поддерживается канатом, и предусмотрено первое средство регулирования длины каната для регулирования длины каната с целью определения высоты указанного поддерживаемого веса, и второе средство регулирования длины каната для регулирования длины каната с целью определения облегчающей силы, действующей на поддерживаемый вес, при этом второе средство регулирования длины каната включает упругие средства для создания силы, противодействующей поддерживаемому весу путем обеспечения предварительно заданного напряженного состояния и положения упругих средств, и механический регулирующий узел, добавляющий регулирующую или компенсирующую силу при отклонении упругих средств от предварительно заданного напряженного состояния и положения.
Первое средство регулирования длины каната предпочтительно включает точку крепления конца каната, причем канат меняет направление, огибая по меньшей мере один подвижный блок, и предусмотрен узел привода для перемещения подвижного блока относительно по меньшей мере одного неподвижного блока.
В наиболее предпочтительном варианте положение точки крепления жестко привязано к положению по меньшей мере одного неподвижного блока.
Изобретение улучшает управление высотой и облегчающей силой благодаря разделению соответствующих функций. Высота веса зависит от телосложения пациента, от того, высокорослый он или низкорослый. Надлежащая регулировка производится в начале тренировочной процедуры. Соответствующее устройство может работать медленно; регулировка может производиться даже вручную. Таким образом, устройство согласно настоящему изобретению обеспечивает медленное изменение длины каната, не связанное с выборкой длины каната намоткой, поэтому распределенное растяжение каната распределяется на всю его длину.
В ходе лечебной процедуры должно осуществляться управление облегчающей силой. Второе средство регулирования длины каната делит требуемую облегчающую силу на две части: первую - статическую, обеспечивающую приблизительный силовой отклик, и вторую - динамическую, обеспечивающую быстрые колебания облегчающей силы в связи с шагами пациента.
Для адаптации принципов настоящего изобретения к более широкому диапазону средств те или иные устройства могут быть оснащены приводами и могут быть подсоединены к компьютерным системам с памятью, включающей базу данных по различным пациентам (высота подвески и требуемая ориентировочная облегчающая сила) и по различным параметрам лечебной ходьбы (точно подобранные программы изменения облегчающей силы). Это обеспечивает быстрое и надежное определение и регулирование высоты для разных пациентов и облегчающей силы в рамках тренировочной программы для каждого пациента.
Таким образом, устройство согласно настоящему изобретению обеспечивает то преимущество, что любого пациента легко поместить в аппарат для лечения на тренажере «бегущая дорожка», который очень легко регулируется с учетом нужд пациента. Не требуется никакой специальной подготовки тренажера «бегущая дорожка» и не требуется применения индивидуализированных упругих средств.
Краткое описание чертежей
Фиг.1 схематически представляет вид сбоку устройства согласно первому варианту осуществления настоящего изобретения; устройство находится в среднем положении.
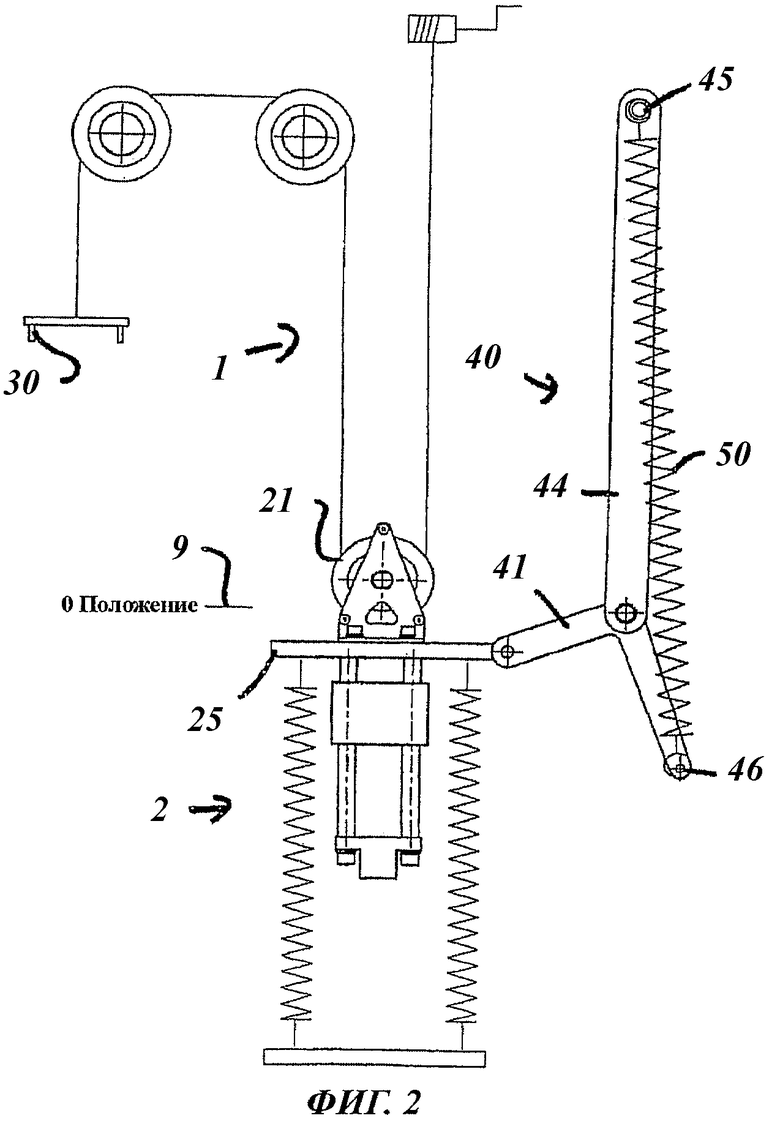
Фиг.2 схематически представляет вид сбоку устройства, соответствующего Фиг.1; устройство находится в положении, когда вес поднят.
Фиг.3 схематически представляет вид сбоку устройства, соответствующего Фиг.1; устройство находится в положении, когда вес опущен.
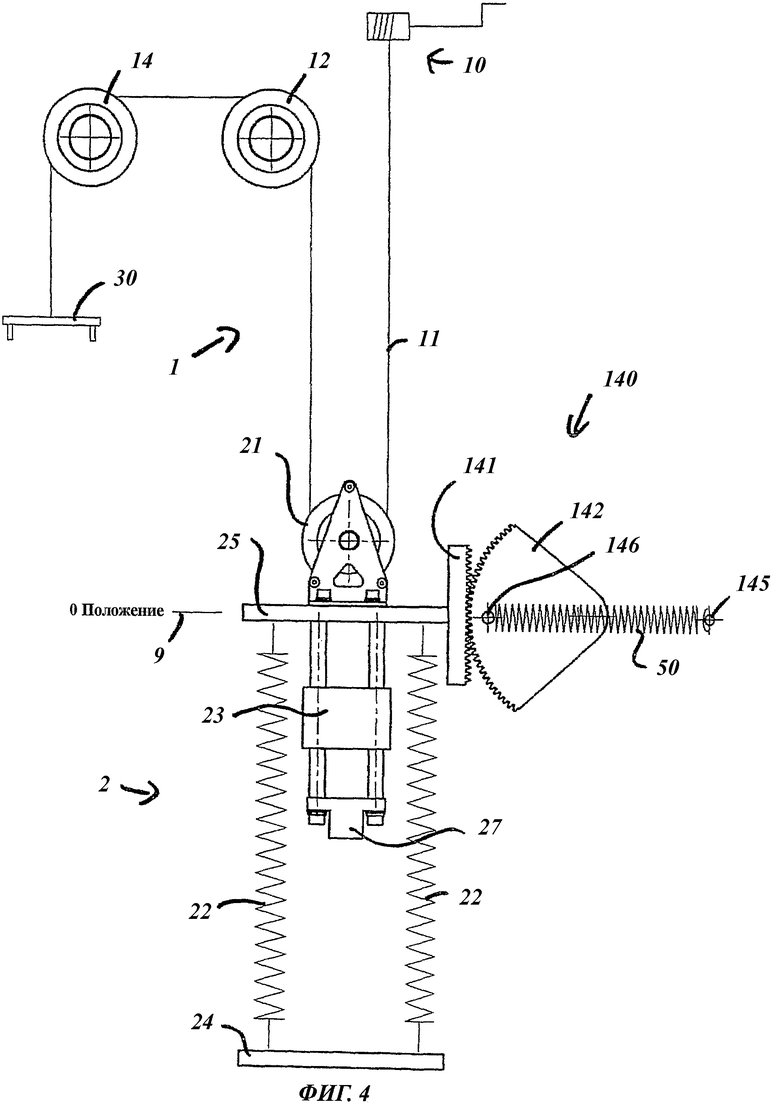
Фиг.4 схематически представляет вид сбоку устройства согласно второму варианту осуществления настоящего изобретения; устройство находится в среднем положении.
Фиг.5 схематически представляет вид сбоку устройства, соответствующего Фиг.4; устройство находится в положении, когда вес опущен.
Фиг.6 схематически представляет вид сбоку устройства, соответствующего Фиг.4; устройство находится в положении, когда вес поднят.
Фиг.7 схематически представляет вид сбоку устройства согласно еще одному варианту осуществления настоящего изобретения.
Осуществление изобретения
Фиг.1 схематически представляет вид сбоку устройства для регулирования предварительного напряжения пружины согласно одному из вариантов осуществления настоящего изобретения.
Устройство показано в применении на аппарате для управления высотой положения веса и облегчающей силой, действующей на этот вес. Такого рода аппарат включает две основные составные части: первую - статическую часть 1 и вторую - динамическую часть 2. Статическая составная часть 1 включает подъемное средство 10, здесь оно схематически изображено как лебедка 10, но его предпочтительно заменять узлом согласно Фиг.7, управляющим первичным канатом 11, к которому прикреплен вес. В изображенном варианте осуществления первичный канат 11, закрепленный на вращающемся барабане лебедки 10, идет предпочтительно параллельно главной продольной оси 20 динамической части 2 устройства. Упомянутая главная продольная ось 20 обычно имеет вертикальное пространственное направление.
Канат 11 огибает подвижный блок 21, являющийся элементом упомянутой динамической части 2; выходящий из динамической части 2 участок 13 каната 11 является регулировочным участком каната. Далее канат 11 на выходе из устройства меняет направление, огибая один или несколько неподвижных блоков 12 и 14; соответствующее продолжение каната 11 оканчивается в обозначенной номером 30 подвеске поддерживаемого веса.
Пациент, который намерен использовать известный аппарат для лечения на тренажере «бегущая дорожка», например аппарат, соответствующий документу ЕР 1 137 378, прикрепляется к упомянутому продолжению каната 11 с помощью вертикально ориентированной подвески (не показана). Лебедка 10 статично поддерживает пациента, чтобы он не упал и, следовательно, сама по себе также ответственна за безопасность пациента.
Динамическая часть 2 включает несколько упругих средств 22. Упругие средства в варианте осуществления, изображенном на Фиг.1, это пружинные средства, выполненные в виде двух винтовых пружин, размещенных по обе стороны от центральной направляющей втулки 23. Помимо использования винтовых пружин 22 возможно также применение различных типов упругих средств, способных оказывать силовое воздействие в примерном диапазоне возможных весов, которые должны прикрепляться к продолжению 30 каната 11.
Пружины 22 закреплены между нижней плитой 24 и верхней плитой 25, образуя соединительную часть, как будет описано ниже. Нижняя плита 24 может быть жестко закреплена в каркасе или может смещаться в направлении продольной оси 20 для фиксации начального удлинения. Верхняя плита 25 соединена с блоком 21, оттягивающим канат 11 вниз. Благодаря изменению направления участка 13 каната блоки 12, 14 и 21 выполняют функции блоков полиспаста. Можно использовать даже больше таких изменений направления, чтобы регулировки длины продолжения 30 каната передавались в виде значительно меньших перемещений блока 21.
Фиг.1 показывает устройство в так называемой «0-позиции», она отмечена горизонтальной линией с номером ссылки 9.
Верхняя плита 25 соединена с механическим регулирующим узлом 40, имеющим подвижную часть. В данном варианте осуществления упомянутая подвижная часть включает коленчатый рычаг 41. Коленчатый рычаг 41 в средней точке колена 42 шарнирно соединен с нижним концом стержня 44, верхний конец 45 которого жестко закреплен. Один конец коленчатого рычага 41 шарнирно крепится к верхней плите 25 в точке 43. Как видно из фиг.1, точка 42 соединения находится в 0-позиции на высоте верхней плиты 25. Предпочтительно изменить начальную нагрузку на пружины 22, в данном случае посредством изменения положения плиты 24, чтобы гарантировать начальное среднее положение на высоте 9, то есть на высоте точки 42 соединения. Создающий силовое воздействие элемент 50 закреплен между точкой 45 крепления и вторым концом 46 коленчатого рычага 41. Этот создающий силовое воздействие элемент 50 может быть выполнен в виде еще одной пружины, как показано на фигуре.
Это позволяет непосредственно использовать упомянутую дополнительную пружину для поддержания требуемой нагрузки пружины вблизи рабочей точки на Фиг.1 и на Фиг.2 и 3. Одни и те же элементы обозначены на фигурах одними и теми же номерами ссылок.
При использования устройства на тренажере «бегущая дорожка» пациент с неврологическим заболеванием, прикрепленный подвеской ко второму концу 30 каната 11, будет подтягиваться над дорожкой лебедкой 10 (статической разгружающей системой 1) до тех пор, пока не встанет на ноги. Величина разгрузки определяется управляющим узлом. Затем маленький двигатель, прикрепленный к плите 24, растягивает пружины 22 до такой длины, которая более или менее соответствует требуемой разгрузке пациента. Таким образом, динамическая система разгружает пациента уже с требуемой силой.
Движение пациента вверх и вниз вызывает силу, которая не остается постоянной в процессе тренировки. Поэтому механический регулирующий узел 40 регулирует изменение силы блока 21, связанное с динамическим движением плиты 25 в процессе тренировки пациента, соответственно механическим ограничениям; таким образом, сила, действующая на веревку11, будет почти постоянной, независимо от положения нагрузки или пациента в пределах определенного диапазона, в результате пациент в процессе всей тренировки испытывает одно и то же облегчение по отношению к силе, действующей в среднем положении.
На Фиг.2 показано действие механического регулирующего узла 40 в положении, когда вес, прикрепленный к подвеске 30, поднят. Облегчающая сила уменьшается вследствие укорочения пружин 22. Кроме того, имеет место отклонение дополнительной пружины 50 от положения равновесия, что создает крутящий момент, определяемый воздействием упомянутой пружины 50 и расстоянием от точки 42 до пружины 50. Наиболее важный эффект - это отклонение от положения неустойчивого равновесия, при котором дополнительная пружина 50 заставляет точку 46 еще дальше отклоняться от положения, показанного на Фиг.1, увеличивая таким образом силу, отклоняющую при посредстве коленчатого рычага 41 плиту 25 от 0-позиции 9, противодействуя тем самым эффекту снижения облегчающей силы вследствие уменьшения длины пружин 22.
На Фиг.3 показано действие механического регулирующего узла 40 в положении, когда вес, прикрепленный к подвеске 30, опущен. Облегчающая сила увеличивается вследствие удлинения пружин 22. Этот эффект усиливается отклонением дополнительной пружины 50, при этом расстояние от точки 42 до пружины 50 уменьшается в результате поворота шарнира коленчатого рычага (и в меньшей степени в результате отклонения стержня 44 в противоположную сторону от точки крепления 46).
Упомянутые два эффекта сочетаются, что приводит к более быстрому восстановлению равновесного положения. Соответствующие характеристики системы улучшаются благодаря использованию положения неустойчивого равновесия механического регулирующего узла 40.
При использовании устройства для тренировки пациентов в ходьбе пациента прикрепляют в положении равновесия с использованием устройства 10, создающего требуемую облетающую силу посредством перемещения и фиксации плиты 24 в заранее заданном месте. Затем пациент идет, при этом его вертикальное перемещение, как правило, происходит в диапазоне от минус 5 до плюс 2 сантиметров. Это связано с тем, что пациент при ходьбе обычно поднимает ноги, и увеличение его роста оказывается больше, чем уменьшение его высоты относительно 0-позиции. В одном из вариантов осуществления настоящего изобретения, предназначенного для применения в такой тренировочной ходьбе, соответствующий диапазон обеспечивается использованием направляющей втулки 23, соединенной с плитой 25 и противолежащей плитой 27, которые служат упорами, ограничивающими диапазон перемещения пружин. В этом варианте осуществления обеспечивается диапазон от минус 65 до плюс 45 миллиметров.
Примененные пружины 22 имеют жесткость 5,3 Н/мм и предназначены для облегчения веса пациента примерно на 20 кг. Поэтому изменение длины пружин 22 на величину плюс или минус 35 миллиметров вызывает изменение силы пружин 22 на величину до 185,5 Н.
Дополнительная пружина 50, показанная на Фиг.1, имеет жесткость около 3 Н/м. Длина упомянутой пружины 50 изменяется лишь по косинусной зависимости около 0, то есть следуя функции 1-(х2/2), если нормальная сила равна 1. Эта сила составляет около 566 Н в положении равновесия и 550 Н - при отклонении на 35 миллиметров. Благодаря применению рычага создается момент, величина которого равна 0 в начальном положении равновесия и доходит до 177 Н на плече 35 миллиметров. Таким образом, данный вариант осуществления настоящего изобретения позволяет компенсировать почти всю величину отклонения силы, с остатком 8,5 Н. Если взять более длинную пружину 50 и рычаг с увеличенным отношением плеч, то, в зависимости от конкретного выбора соответствующих значений, может быть получена более высокая степень компенсации.
Можно использовать компьютеризованные управляющие средства, чтобы положение плиты 24, определяющее облегчающую силу, и положение каната на лебедке 10 или плите 65 на Фиг.7, определяющие высоту положения пациента, запоминались и автоматически использовались для привода двух этих управляющих элементов.
Фиг.4 схематически представляет вид сбоку устройства для регулирования предварительного напряжения пружины согласно второму варианту осуществления настоящего изобретения. Все элементы, идентичные или аналогичные изображенным на предшествующих фигурах, обозначены теми же номерами.
Статическая часть 1 и динамическая часть 2 в отношении монтажа пружин 22 идентичны первому варианту. Отличие заключается в том, что механический регулирующий узел 140 имеет иную подвижную часть. В этом варианте осуществления упомянутая подвижная часть включает вертикальный храповик 141, находящийся в зацеплении с зубчатым колесом 142. Предпочтительно, чтобы зубчатое колесо 142 представляло собой лишь часть колеса, лишь сектор с углом, например, 90°, поскольку вертикальное перемещение храповика 141 допускает поворот зубчатого колеса лишь на величину, приблизительно составляющую плюс/минус 45°. На высоте нулевой позиции 9 в точке 145 на продолжении зубчатого колеса 142 прикреплена дополнительная пружина 50. Вторая точка крепления (на Фиг.4 она - в среднем положении) этой дополнительной пружины 50 находится вблизи периферии зубчатого колеса на высоте нулевой позиции 9.
На Фиг.5 и 6 показано действие устройства согласно второму варианту осуществления; из этих фигур видно, что имеются различные возможности крепления дополнительного пружинного средства 50 для получения дополнительной силы, как было описано в связи с первым вариантом. Это значит, что при опускании веса, как показано на Фиг.5, поворот зубчатого колеса 142 вызывает отклонение дополнительной пружины 50 от положения равновесия. Благодаря тому, что ось поворота зубчатого колеса 142 находится между двумя точками крепления 146 и 145, поворот зубчатого колеса 142 поддерживается пружиной 50, которая увеличивает силовое воздействие на зубчатое колесо 142 и храповик 141 и, таким образом, дополнительно увеличивает облегчающую силу.
На Фиг.6 показан подъем веса с соответствующим укорочением пружин 22 и снижением облегчающей силы. Это снижение уменьшается благодаря отклонению дополнительной пружины 50 при повороте зубчатого колеса 142 в противоположном, по сравнению с Фиг.5, направлении; при этом эффект увеличения силового воздействия механического регулирующего узла 40 остается тем же самым.
Настоящее изобретение базируется на понимании того, что введение двух раздельных пружинных воздействий обеспечивает предпочтительное поведение динамического устройства вблизи его среднего положения. Увеличение веса растягивает пружины 22 и увеличивает облегчающую или противодействующую силу. Этот эффект еще более усиливается введением дополнительной пружины 50, которая в среднем положении находится в неустойчивом равновесии и при отклонении от этого равновесного положения оказывает положительное (подталкивающее) силовое воздействие на плиту 25, противодействуя влиянию закона Гука на облегчение веса и увеличивая свое воздействие при увеличении приложенной силы веса. В практических применениях это значительно снижает колебания поддержки веса, например, с 10% до менее 1% - или даже более, в зависимости от выбора специалистом конкретных параметров.
В одном из вариантов осуществления настоящего изобретения, не показанном на схемах, в состав элемента 50, создающего силовое воздействие, входит привод. Этот привод соединяется с механическим регулирующим узлом для перемещения подвижной части, сцепленной с соединительной частью 25. Привод может включать вал, сориентированный параллельно пружинам 22 и сцепленный с плитой 25 для перемещения упомянутой плиты в продольном направлении пружин 22. Этот привод соединяется с блоком управления, который управляет приводом таким образом, чтобы привод добавлял регулирующее или компенсирующее силовое воздействие при отклонении упругих средств 22 от заранее заданного напряженного состояния или положения. Другими словами, привод управляется для силового воздействия на подвижную часть по заранее заданной зависимости от положения этой подвижной части. Этот привод замещает пружину 50 на Фиг.1 или 4, представляя другой вариант осуществления настоящего изобретения. Таким образом, имеется возможность заранее задать необходимые параметры управления привода, то есть откалибровать его соответственно положениям механического узла.
Хотя в вариантах осуществления, соответствующих Фиг.1 - 6, схематически изображена лебедка 10, в этом применении, а также в иных областях техники, предпочтительно использовать цепную таль или полиспаст 60, показанный на Фиг.7. Поддерживаемый вес расположен в точке прикрепления 30. Канат 11 меняет направление, например, на блоках 12 и 14 и входит в полиспаст 60. В нем канат 11, начиная с блока 61, несколько раз - по крайней мере один раз - изменяет направление, огибая подвижные блоки 62, прикрепленные к подвижной опоре 65, и неподвижные блоки 63, прикрепленные к неподвижной опоре 64. Наконец, в точке 66 канат 11 крепится к неподвижной опоре, хотя он может также крепиться и к подвижной опоре 65. Все регулировки длины каната 11 осуществляются с помощью закрепленного на неподвижной опоре 67 привода 67, вращающего шпиндель, который увеличивает или уменьшает расстояние между двумя опорами 64 и 65. Важной идеей изобретения является применение такой автоматически применимой к любому канату системы полиспаста, которая позволяет избежать асимметричного нагружения каната 11 при его намотке на барабан, как это имеет место в случае использования системы с лебедкой. Помимо отсутствия возрастающих со временем повреждений каната из-за его намотки, настоящее предложение обладает преимуществом неизменности свободной длины каната при всех рабочих условиях, так как канат всегда натянут между точками 30 и 66 и лишь меняет направление, например, огибая блоки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЁР И СПОСОБ ВЫПОЛНЕНИЯ УПРАЖНЕНИЙ | 2017 |
|
RU2660300C1 |
| Устройство для тренировки мышц ног | 2019 |
|
RU2706437C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ТРЕНИРОВКИ СВЯЗОК И МЫШЦ НИЖНИХ КОНЕЧНОСТЕЙ | 2009 |
|
RU2406553C1 |
| ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ БЕГОВЫХ СПОСОБНОСТЕЙ | 2021 |
|
RU2769182C1 |
| ТРЕНАЖЕР ХОДЬБЫ ДЛЯ ТРЕНИРОВКИ НЕРВНО-МЫШЕЧНЫХ ФУНКЦИЙ | 2020 |
|
RU2807305C2 |
| Тренажерный комплекс для функциональной терапии нижних конечностей и способ его применения | 2017 |
|
RU2678916C1 |
| УЛУЧШЕННАЯ РЕМЕННАЯ СИСТЕМА ДЛЯ ПОДДЕРЖКИ ТЕЛА | 2015 |
|
RU2677919C1 |
| ИМИТАТОР БЕГА И ХОДЬБЫ КОСМОНАВТА НА БОРТУ КОСМИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2196086C2 |
| ИМИТАТОР БЕГА И ХОДЬБЫ КОСМОНАВТА НА БОРТУ КОСМИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2196085C2 |
| ТРЕНАЖЕР С "БЕГУЩЕЙ" ДОРОЖКОЙ ДЛЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2524912C1 |





Изобретение относится к медицинской технике и может быть использовано для регулирования высоты веса и облегчающей силы, действующей на вес. В устройстве параллельно упругим средствам присоединен механический регулирующий узел для предварительного регулирования заранее заданного напряженного состояния. Узел включает подвижную часть, которая сцеплена с соединительной частью. Соединительная часть связывает упругие средства с регулирующим узлом и создает силовое воздействие элемент, прикрепленный к подвижной части. Механический регулирующий узел, при указанном заранее заданном напряженном состоянии или положении, находится в неустойчивом равновесии. В результате движение подвижной части таково, что создающий силовое воздействие элемент добавляет регулирующую или компенсирующую силу при отклонении упругих средств от заранее заданного напряженного состояния или положения. 2 н. и 9 з.п. ф-лы, 7 ил.
1. Устройство для регулирования предварительного напряжения упругих средств (22) вблизи предварительно заданного напряженного состояния или положения (9), в особенности предварительного напряжения упругих средств (22), используемых для регулирования высоты положения веса (30) и облегчающей силы, действующей на вес (30), отличающееся тем, что параллельно упругим средствам (22) присоединен механический регулирующий узел (40) для предварительного регулирования предварительно заданного напряженного состояния, причем механический регулирующий узел (40) включает подвижную часть (41, 142), сцепленную с соединительной частью (25), соединяющей упругие средства (22) с регулирующим узлом (40), и создающий силовое воздействие элемент (50), прикрепленный к подвижной части (41, 142), при этом механический регулирующий узел (40), при указанном предварительно заданном напряженном состоянии или положении (9), находится в неустойчивом равновесии, а движение подвижной части (41, 142) таково, что создающий силовое воздействие элемент (50) добавляет регулирующую или компенсирующую силу при отклонении упругих средств (22) от предварительно заданного напряженного состояния или положения (9).
2. Устройство по п.1, отличающееся тем, что создающий силовое воздействие элемент (50) является элементом, создающим крутящий момент.
3. Устройство по п.2, отличающееся тем, что элемент (50), создающий крутящий момент, включает дополнительные упругие средства (50), которые своей первой концевой частью (46, 146) прикреплены к подвижной части (41, 142), в то время как вторая концевая часть (45, 145) дополнительных упругих средств (50) жестко закреплена.
4. Устройство по п.3, отличающееся тем, что механический регулирующий узел (40) включает подвижную часть (41, 141) в виде коленчатого рычага (41), шарнирно прикрепленного к соединительной части (25), или части зубчатого колеса (142), входящей в зацепление с храповиком (141), жестко прикрепленным к соединительной части (25), причем первая концевая часть (46, 146) расположена на коленчатом рычаге (41) или на зубчатом колесе (142) в таком месте, что радиус поворота первой концевой части (46, 146) меньше радиуса дуги окружности, описываемой крайней точкой дополнительных упругих средств (50), а дополнительные упругие средства (50) включают пружину растяжения.
5. Устройство по п.3, отличающееся тем, что механический регулирующий узел (40) включает подвижную часть (41, 141) в виде коленчатого рычага (41), шарнирно прикрепленного к соединительной части (25), или части зубчатого колеса (142), входящей в зацепление с храповиком (141), жестко прикрепленным к соединительной части (25), причем первая концевая часть (46, 146) расположена на коленчатом рычаге (41) или на зубчатом колесе (142) в таком месте, что радиус поворота первой концевой части (46, 146) больше радиуса дуги окружности, описываемой крайней точкой дополнительных упругих средств (50), а дополнительные упругие средства (50) включают пружину сжатия.
6. Устройство по п.1, отличающееся тем, что создающий силовое воздействие элемент (50) представляет собой вес, прикрепленный к плечу рычага.
7. Устройство по одному из пп.1-6, отличающееся тем, что упругие средства (22) включают по меньшей мере одну пружину растяжения, или одну нажимную пружину, или тарельчатые пружины.
8. Устройство по п.1, отличающееся тем, что создающий силовое воздействие элемент (50) включает привод, соединенный с механическим регулирующим узлом (40) для перемещения подвижной части, сцепленной с соединительной частью (25), и блок управления, который управляет приводом таким образом, чтобы привод добавлял регулирующее или компенсирующее силовое воздействие при отклонении упругих средств (22) от предварительно заданного напряженного состояния или положения (9).
9. Устройство для регулирования высоты положения веса и облегчающей силы, действующей на этот вес, в особенности на вес пациента в средствах тренировки передвижения, предназначенных для лечебной ходьбы пациентов с парапарезом и гемипарезом, содержащее устройство по одному из пп.1-7, причем указанный вес поддерживается канатом (11, 30), и предусмотрено первое средство (1) регулирования длины каната для регулирования длины каната (11), с целью определения высоты указанного поддерживаемого веса, и второе средство (2) регулирования длины каната для регулирования длины каната (11), с целью определения облегчающей силы, действующей на поддерживаемый вес, при этом второе средство (2) регулирования длины каната включает упругие средства (22) для создания силы, противодействующей поддерживаемому весу путем обеспечения предварительно заданного напряженного состояния и положения (9) упругих средств (22), и механический регулирующий узел (40), добавляющий регулирующую или компенсирующую силу при отклонении упругих средств (22) от предварительно заданного напряженного состояния и положения (9).
10. Устройство по п.9, отличающееся тем, что первое средство (1) регулирования длины каната включает точку крепления (66) конца каната (11), причем канат (11) меняет направление, огибая по меньшей мере один подвижный блок (62), и предусмотрен узел привода (67) для перемещения подвижного блока (62) относительно по меньшей мере одного неподвижного блока (61, 63, 12, 14).
11. Устройство по п.10, отличающееся тем, что положение точки (66) крепления жестко привязано к положению по меньшей мере одного неподвижного блока (61, 63, 12, 14).
| US 5273502 А, 28.12.1993 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| Устройство для разработки движений в коленном суставе | 1978 |
|
SU685288A1 |
| СПОСОБ УСТРАНЕНИЯ КОСОГЛАЗИЯ | 2000 |
|
RU2212212C2 |
| Устройство для механотерапии голеностопного сустава | 1986 |
|
SU1416123A1 |

