Область техники, к которой относится изобретение
Настоящее изобретение относится к тренажеру ходьбы для тренировки нервно-мышечных функций, содержащему:
- подъемную систему с вращаемым тросовым барабаном, тросом, выполненным с возможностью наматывания на вращаемый тросовый барабан, и тросовым наконечником, выполненным с возможностью взаимодействия с пациентом;
- электродвигатель, выполненный с возможностью осевого сцепления с вращаемым тросовым барабаном и с возможностью приведения в движение указанного вращаемого тросового барабана в прямом и обратном направлении приведения в движение для разматывания троса с тросового барабана или для наматывания троса на этот барабан;
- датчик веса, выполненный с возможностью выдачи количественного сигнала датчика веса;
- блок управления;
- процессор, выполненный с возможностью приема количественного сигнала датчика веса, причем указанный процессор выполнен с возможностью вычисления и вывода сигнала управления двигателем,
- устройство управления двигателем, выполненное с возможностью приема сигнала управления двигателем.
Изобретение также относится к способу тренировки нервно-мышечных функций с помощью такого тренажера ходьбы, содержащего электродвигатель, датчик веса и трос.
При использовании тренажера ходьбы данный способ может содержать операцию определения веса противовеса, который должен действовать на трос со стороны электродвигателя, и операцию измерения датчиком веса фактического веса, действующего на трос со стороны пациента, причем направление приведения в движение электродвигателя определяют на основе сравнения веса противовеса с измеренным фактическим весом, действующим на трос со стороны пациента.
Тренажер ходьбы может содержать подъемную систему с вращаемым тросовым барабаном и тросом для наматывания троса на вращаемый тросовый барабан или для разматывания троса с этого барабана в соответствии с направлением приведения в движение, заданным на основе сравнения веса противовеса с измеренным фактическим весом, действующим на трос со стороны пациента.
Тренажер ходьбы может также содержать электродвигатель, выполненный с возможностью осевого сцепления с вращаемым тросовым барабаном и с возможностью приведения в движение вращаемого тросового барабана в направлении приведения в движение. Тренажер ходьбы может также содержать датчик веса, блок управления, процессор и устройство управления двигателем.
Подъемная система может быть свободно навешена на датчик веса.
Уровень техники
Реабилитация обычно имеет форму тренировочного процесса в течение заданного периода времени, где отправной точкой является уровень функциональных навыков конкретного пациента. Реабилитационные упражнения могут содержать передвижение, занятие определенных положений, силовые тренировки, растяжку, активные двигательные упражнения и выполнение повседневных действий. С чисто терапевтической точки зрения цель реабилитации состоит в том, чтобы поддержать и увеличить функциональные навыки, насколько это возможно.
Реабилитационные процессы часто требуют больших усилий профессионального врача, от которого требуется компенсировать недостаточную подвижность пациента и его неспособность помочь себе самостоятельно.
Для быстрой реабилитации необходимы уверенность и безопасность.
Длительные периоды госпитализации с обязательным длительным пребыванием в постели могут иметь серьезные последствия для здоровья и самочувствия пациента. Лежание в неподвижном состоянии увеличивает риск образования тромбов в легких и кожных осложнений, таких как пролежни.
Другими осложнениями, обычно связанными с длительной госпитализацией, являются потеря мышечной массы и силы, и эти проблемы могут фактически повлиять как на продолжительность госпитализации, так и на способность пациента функционировать после выписки.
Для госпитализированных пациентов длительные периоды неподвижности могут повысить риск следующих явлений:
• респираторные осложнения, такие как пневмония, ателектаз и тромбоэмболия легочной артерии;
• запоры;
• недержание;
• повреждение тканей и пролежни;
• тромбы в ногах (тромбоз глубоких вен);
• снижение мышечной массы и мышечной силы;
• снижение физической подготовленности;
• нарушение равновесия, особенно у пожилых пациентов.
Поэтому чрезвычайно важно привлекать пациентов к процессам реабилитации (мобилизовывать) как можно раньше - идеально еще в период госпитализации.
Ранняя мобилизация позволит пациентам быстрее начать реабилитацию, что улучшит восстановление после операции за счет усиления кровообращения и снижения риска инфекций и других осложнений.
Под ранней мобилизацией и реабилитацией понимают упражнения по занятию определенных положений / изменению положений и физическую активность, а также проведение большего времени вне постели - прогулки или просто вставание. Другие виды деятельности могут включать в себя простые повседневные процедуры, такие как расчесывание волос, протирание (мытье) лица и рук влажной фланелью, упражнения в кровати и/или рядом с ней, тренировка равновесия и ходьба вокруг кровати.
Однако ранняя мобилизация связана с рядом проблем - повышенный риск падений, непреднамеренных движений и чувство незащищенности у пациента. Такие проблемы могут порождать серьезную потребность в физической помощи и опасность травмирования обслуживающего персонала и врачей.
Обычные задачи по подъему и перемещению, связанные с госпитализацией и ранней мобилизацией могут включать в себя:
• помощь пациентам в принятии сидячего положения для проверки их реакций, рефлексов, защитных реакций;
• поддержка сидячего положения;
• перемещение пациентов между кроватью, стулом, смотровой кушеткой и т.д.;
• подъем верхней части тела для установки опор, подушек и т.п.;
• подъем бедер при застилании постели под пациентом;
• подъем конечностей;
• посещение туалета (использование туалетного стула, если требуется);
• переход из одного положения в другое;
• перемещение пациентов из положения сидя в положение стоя, и наоборот;
• поддержание равновесия в стоячем/сидячем положении;
• реакции, рефлексы, защитные реакции в вертикальном положении;
• смещение веса;
• тренировка ходьбы;
• упражнения в постели.
Раскрытие сущности изобретения
Целью настоящего изобретения является создание тренажера ходьбы для тренировки нервно-мышечных функций для ранней мобилизации, который можно регулировать в соответствии с прогрессом в восстановлении пациента и набранной силой.
Цель изобретения может быть достигнута посредством тренажера ходьбы, упомянутого во введении и определенного в ограничительной части пункта 1 формулы изобретения и отличающегося тем, что процессор выполнен с возможностью установки вычисленного направления приведения в движение на двигателе на основе принятого количественного сигнала датчика веса и на основе результата сравнения этого фактического количественного сигнала веса с весом противовеса, определенным перед началом тренировки,
причем указанное устройство управления двигателем выполнено с возможностью установки вычисленного направления приведения в движение на двигателе, поддерживая постоянное значение для определенного веса противовеса, действующего на трос со стороны электродвигателя, и
при этом подъемная система свободно навешена на датчики веса, причем тренажер ходьбы содержит два датчика веса, и датчики веса расположены на подъемной системе сбоку, что уменьшает конструктивную высоту тренажера ходьбы.
Тренажер ходьбы содержит два датчика веса. Датчики веса расположены на подъемной системе сбоку, что уменьшает конструктивную высоту тренажера ходьбы.
Уменьшение размеров по высоте может быть важным для повышения удобства использования тренажера ходьбы, в частности, в уже имеющихся помещениях и/или на уже имеющемся оборудовании.
Поскольку тренажер ходьбы подходит для выполнения упражнений стоя, которые могут включать в себя упражнения на равновесие, ходьбу и/или бег, то при установке и использовании тренажера ходьбы следует учитывать высоту подъемной системы и рост пациента.
Кроме того, эти упражнения позволяют привлекать дополнительное оборудование, увеличивающее высоту, требуемую для их выполнения, например, беговые дорожки, балансировочные доски, ступеньки, балансировочные шары и т.д.
При использовании тренажера ходьбы способ может содержать операцию определения веса противовеса, который должен действовать на трос со стороны электродвигателя.
Способ может быть использован для тренировки нервно-мышечных функций.
Способ может дополнительно содержать операцию измерения датчиком веса фактического веса, действующего на трос со стороны пациента, операцию сравнения фактического действующего веса с определенным весом противовеса и операцию выдачи команды направления приведения в движение на устройство управления двигателем посредством предоставления сигнала управления двигателем на основе результата сравнения фактического действующего веса с определенным весом противовеса.
Выполнение операции измерения фактического веса, действующего на трос со стороны пациента, операции сравнения фактического действующего веса с определенным весом противовеса и операции выдачи команды направления приведения в движение на устройство управления двигателем может происходить непрерывно, поддерживая постоянное значение для определенного веса противовеса, действующего на трос со стороны электродвигателя.
Одним из результатов этого варианта осуществления изобретения может быть то, что тренажер ходьбы может работать в динамическом режиме, когда во время тренировки осуществляется постоянное поддержание веса противовеса. Таким образом, тренировочную нагрузку, действующую на пациента, также можно поддерживать на постоянном уровне.
Одним из результатов этого варианта осуществления изобретения может быть обеспечение способа тренировки, при котором пациент может выполнять естественные движения, но с уменьшенным весом тела. В других условиях это может быть достигнуто посредством тренировки в воде. Однако во многих обстоятельствах это может оказаться невозможным из-за отсутствия соответствующих средств и/или из-за условий на полный контакт тела с водой, например, в связи с осложнениями у пациента.
Другим результатом указанного варианта осуществления изобретения может быть обеспечение способа тренировки, поддерживающего упражнения стоя, такие как балансирование, ходьба и/или бег.
Данный способ тренировки может быть реализован посредством встраивания этапов способа в уже существующие подъемные системы для пациента, имеющие электродвигатель, датчик веса и трос, выполненные такими, как описано выше, поскольку подъемные системы для пациента сами по себе выполнены с возможностью наматывания и разматывания троса, чтобы поднимать и опускать пациента.
На тросовом наконечнике может быть установлена пряжка для дальнейшего крепления к стропе, ремню или аналогичным узлам, выполненным с возможностью удержания пациента или ношения пациентом. Такие удерживающие или носимые узлы могут быть использованы вместе с уже существующими подъемными системами для пациента. Альтернативно новые формы или модели удерживающих или носимых узлов могут быть добавлены в рамках дооснащения к уже существующим подъемным системам для пациента посредством соединительных узлов, подходящих к пряжкам уже существующих подъемных систем для пациента.
В одном аспекте осуществления способа пользователь может определить требуемую весовую нагрузку перед началом тренировки. Требуемая весовая нагрузка может представлять собой противовес или альтернативно тренировочную нагрузку, подлежащую приложению пациентом. После определения требуемой весовой нагрузки тренировка может начаться, как только пациент будет присоединен к тросу, например, путем ввода стропы, присоединенной к тросовому наконечнику. Еще одним результатом может быть то, что требуемая весовая нагрузка может быть легко и точно задана на последующих тренировочных занятиях. Последующие тренировочные занятия могут также зависеть от прогресса и выполнения отдельных упражнений на предыдущих тренировочных занятиях.
В одном аспекте способ может быть адаптирован для поэтапного изменения тренировочной нагрузки, подлежащей приложению пациентом во время тренировочного занятия. Альтернативно тренировка может быть адаптирована для переключения между статическим режимом и динамическим режимом, причем в статическом режиме не происходит регулирование веса противовеса в зависимости от действующего со стороны пациента усилия. В динамическом режиме может, наоборот, происходить адаптация веса противовеса в зависимости от фактического веса, действующего на трос со стороны пациента.
В одном варианте осуществления изобретения способ может дополнительно содержать операции предоставления веса пациента и определения веса противовеса в процентах от предоставленного веса пациента. Разность между предоставленным весом пациента и весом противовеса может быть тренировочной нагрузкой, подлежащей приложению пациентом.
В одном аспекте вес противовеса может быть определен посредством задания тренировочной нагрузки, подлежащей приложению пациентом, а затем вычисления разности между предоставленным весом пациента и тренировочной нагрузкой, подлежащей приложению пациентом.
Тренировочная нагрузка может быть выражена в процентах от веса пациента.
Такой вариант осуществления изобретения может обеспечить возможность снятия с пациента некоторой части его веса. Однако для этого необходимо, чтобы вес пациента был известен заранее и мог быть зафиксирован.
Альтернативно указанию веса пациента в одном варианте осуществления способа вес пациента может быть предоставлен как вес, измеренный датчиком веса.
Одним из результатов этого способа может быть подтверждение, что способ использует правильный и актуальный вес пациента. Это позволяет обеспечить то, что тренировочная нагрузка, подлежащая приложению пациентом, может быть задана независимо от любого увеличения или уменьшения веса пациента.
В одном варианте осуществления способа электродвигатель ограничен максимальной скоростью разматывания троса. Это может быть полезно, чтобы при падении, вызванном потерей опоры, спотыканием или потерей равновесия, предотвратить несчастный случай благодаря медленному опусканию пациента на основание. Это может быть дополнительно предпочтительно в отношении предотвращения или минимизации опасности травмирования обслуживающего персонала и врачей за счет уменьшения непреднамеренных движений, вызванных стремлением предотвратить падение пациента.
Блок управления может быть выполнен с возможностью осуществления этапов, используемых в способе для тренировки нервно-мышечных функций.
Одним из результатов этого варианта осуществления изобретения может быть то, что тренажер ходьбы может работать в динамическом режиме и в статическом режиме.
В статическом режиме может не происходить регулирование веса противовеса в зависимости от приложенного со стороны пациента усилия. В динамическом режиме может, наоборот, происходить адаптация веса противовеса в зависимости от приложенного со стороны пациента усилия.
Одним из результатов этого варианта осуществления изобретения может быть обеспечение тренировочной системы, при которой пациент может выполнять естественные движения, но с уменьшенным весом тела. Раньше этого можно было достичь, тренируясь в воде, что может быть не самым оптимальным для пациентов, находящихся в больнице, поскольку в зависимости от осложнений пациента полный контакт тела с водой может оказаться невозможным.
Данный тренажер ходьбы позволяет поддерживать упражнения в положении стоя, такие как балансирование, ходьба и/или бег.
Данный тренажер ходьбы может быть реализован посредством встраивания процессора и устройства управления двигателем для выполнения этапов способа в уже существующие подъемные системы для пациента, имеющие электродвигатель, датчик веса и трос, выполненные так, как описано выше, поскольку подъемные системы для пациента сами по себе выполнены с возможностью наматывания и разматывания троса, чтобы поднимать и опускать пациента.
На тросовом наконечнике может быть установлена пряжка для дальнейшего крепления к стропе, ремню или аналогичным узлам, выполненным с возможностью удержания пациента или ношения пациентом. Такие удерживающие или носимые узлы могут быть использованы вместе с уже существующими подъемными системами для пациента. Альтернативно новые формы или модели удерживающих или носимых узлов могут быть добавлены в рамках дооснащения к уже существующим подъемным системам для пациента посредством соединительных узлов, подходящих к пряжкам уже существующих подъемных систем для пациента.
В одном варианте осуществления изобретения тренажер ходьбы может содержать датчик веса и фиксированную подвеску. Фиксированная подвеска может содержать средство уравновешивания сил. Датчик веса и фиксированная подвеска могут быть расположены на подъемной системе сбоку, что уменьшает конструктивную высоту тренажера ходьбы.
Фиксированная подвеска удерживает подъемную систему в подвешенном состоянии. Фиксированная подвеска может содержать сквозные отверстия в рельсовом креплении и подъемной системе и штифт. Штифт устанавливают в сквозные отверстия.
На одной стороне подъемной системы может быть смонтирован датчик веса. На другой стороне подъемной системы может быть предусмотрена фиксированная подвеска. В этом случае фиксированная подвеска содержит средство уравновешивания сил, так что полный вес, воспринимаемый фиксированной подвеской и датчиком веса, может быть вычислен на основе веса, измеренного датчиком веса. Средство уравновешивания сил может представлять собой штифт, вокруг которого может поворачиваться подъемная система, когда вес, измеряемый датчиком веса, растет.
Этот вариант осуществления изобретения может давать те же результаты и преимущества, что и тренажер ходьбы с двумя датчиками веса, и его можно рассматривать просто как альтернативный вариант осуществления изобретения.
Одним из преимуществ этого варианта осуществления изобретения по сравнению с тренажером ходьбы с двумя датчиками веса может быть снижение стоимости системы на уровне компонентов. Другим преимуществом может быть более простая установка подъемного механизма и, как следствие, снижение затрат на техобслуживание.
В одном варианте осуществления изобретения тренажера ходьбы датчик (датчики) веса может содержать динамометрический датчик, выполненный в виде преобразователя приложенного усилия в электрический сигнал, являющийся количественным сигналом датчика веса. Динамометрический датчик может представлять собой тензометрический динамометрический датчик.
Одним из результатов использования динамометрического датчика является прямое преобразование приложенного усилия в количественный электрический сигнал. Электрический сигнал может быть затем использован как входной сигнал для дальнейшего обмена данными между устройствами, входящими в состав тренажера ходьбы.
В одном аспекте в тренажере ходьбы используются цифровые датчики веса на основе тензометрического преобразователя. В конкретном варианте осуществления могут быть использованы цифровые датчики веса на основе тензометрического преобразователя типа: НВМ S40A/ 250 кг (Eilersen).
В одном аспекте в тренажере ходьбы могут быть использованы динамометрические датчики на основе тензометрического преобразователя. В конкретном варианте осуществления могут быть использованы динамометрические датчики на основе тензометрического преобразователя типа: Zemic "H3G-C3-250kg-6В".
Динамометрический датчик может быть выбран в соответствии с требуемой нагрузкой, предназначенной для тренажера ходьбы с механическими размерами, соответствующими механическим размерам, которые должны быть получены для тренажера ходьбы, и в частности применительно к тренажеру ходьбы, монтируемому на потолке. При выборе соответствующих динамометрических датчиков можно также учитывать следующие аспекты, такие как аттестация промышленного и медицинского оборудования.
Другие аспекты, такие как линейность и точность на интервале измерения динамометрического датчика, также могут быть подлежащими учету параметрами.
Другим аспектом, который может быть важным, является частота взятия отсчетов, где частота 20-1000 отсчетов в секунду может быть предпочтительной, поскольку изменение приложенного усилия / веса может быть динамичным.
В одном варианте осуществления изобретения тренажер ходьбы может содержать рельсовое крепление, выполненное с возможностью взаимодействия с потолочным рельсом и с одним или несколькими датчиками веса. Датчик (датчики) веса может быть присоединен к рельсовому креплению на одном конце и к подъемной системе на другом конце, благодаря чему подъемная система свободно подвешена на датчике (датчиках) веса.
Одним из результатов этого варианта осуществления изобретения может быть использование данного тренажера ходьбы с уже существующими потолочными рельсами.
Использование потолочного подъемного механизма в сочетании с реабилитационными упражнениями может повысить уверенность и безопасность как пользователя, так и врача.
Пользователь может чувствовать себя более уверенно и выполнять указания врача без опасения упасть. Врач также может оказывать помощь и руководить процессом, не опасаясь получить травму спины из-за того, что пациент вдруг потеряет равновесие и/или упадет.
Это может позволить выполнять более сложные упражнения и в большем количестве. Сопровождаемая подъемным механизмом поддержка пациента как часть реабилитационных программ может быть использована на всех уровнях мобильности и открывает путь для гибких, точно ориентированных тренировок, адаптированных к функциональным возможностям конкретного пользователя.
Смонтированная на потолке подъемная система может быть часто подвешена на двух направляющих на рельсе, так что при наличии 2 динамометрических датчиков подъемный механизм может быть подвешен каждый на своей собственной направляющей. Альтернативно подъемная система может быть подвешена на датчике веса, который присоединен к устройству обмена данными между этими двумя направляющими.
В одном аспекте тренажер ходьбы может быть использован с приводным двигателем для помощи в боковом направлении, например, для перемещения тренажера в боковом направлении во время упражнений по ходьбе. В этом случае использование двух датчиков веса для подвешивания подъемной системы может обеспечить обнаружение направления движения пациента, благодаря чему подъемный механизм отслеживает пациента посредством приводного двигателя. Хотя перемещение подъемного механизма по рельсу может происходить очень легко, одним из результатов может быть то, что пациент не должен тянуть подъемный механизм для проведения тренировочных упражнений.
Тренажер ходьбы может также иметь тормозное устройство. Тормозное устройство выполнено с возможностью торможения с регулируемым тормозным усилием. С помощью тормозного устройства можно задать регулируемое тормозное усилие.
Тормозное устройство позволяет зафиксировать положение подъемной системы в потолочных рельсах. Это происходит в том случае, когда задано максимальное тормозное усилие.
Тормозное устройство также позволяет задать тормозное усилие на таком уровне, при котором пациент может перемещать подъемную систему по потолочным рельсам, а система оказывает сопротивление в форме тормозного усилия.
Это позволяет выполнять более сложные тренировочные упражнения, включающие более широкий набор движений пациента.
В одном варианте осуществления изобретения тренажер ходьбы может содержать первый и второй потолочные рельсы, смонтированные параллельно друг другу, и третий потолочный рельс, соединяющий первый и второй потолочные рельсы и смонтированный с возможностью скольжения на первом и втором потолочных рельсах. Подъемная система может быть смонтирована с возможностью скольжения на третьем потолочном рельсе.
Эти потолочные рельсы позволяют свободно перемещать подъемную систему в плоскости, параллельной потолку. Это позволяет выполнять пациентом более широкий набор упражнений. Особенно в связи с вышеупомянутым двигателем и/или тормозным устройством.
В одном варианте осуществления тренажера ходьбы трос может иметь видимые индикаторы длины хода троса для использования во время тренировочных занятий.
Эти видимые индикаторы могут быть использованы для описания упражнений, которые должен выполнять пациент. Упражнения могут включать в себя сгибание или разгибание ног, ступней и/или спины, и, следовательно, упражнения могут быть описаны посредством изменением высоты. Применяя видимые индикаторы, можно использовать длину хода для инструктажа пациента и для того, чтобы пациент повторял упражнения и выполнял их правильно, следя за перемещением троса. Индикаторы могут включать в себя цифры, знаки, цвета, линии или сопоставимые индикаторы, используемые для такой цели.
В одном варианте осуществления изобретения тренажер ходьбы может содержать ручное устройство управления для регулировки длины разматываемого и/или наматываемого троса.
Ручное устройство управления может содержать кнопки для разматывания и наматывания троса и/или для регулировки веса противовеса. В этом варианте осуществления изобретения пациент и/или обслуживающий персонал, или врачи могут легко отрегулировать тренажер ходьбы для инициирования тренировочного занятия, а также регулировать тренажер ходьбы во время занятия. Таким образом, тренажер ходьбы можно регулировать в соответствии с ходом выполнения упражнений. Ручное устройство управления может быть использовано для того, чтобы пациент мог управлять тренажером ходьбы во время тренировки, например, посредством консультации с обслуживающим персоналом или врачами, чтобы тренировка прошла надежно и оптимально.
В одном варианте осуществления изобретения тренажер ходьбы может содержать графический пользовательский интерфейс, выполненный с возможностью отображения и/или приема ввода по меньшей мере одного значения, соответствующего значениям, выбранным из группы, состоящей из веса противовеса, веса пациента, тренировочной нагрузки и фактического действующего веса.
Графический пользовательский интерфейс (GUI) может быть использован для задания параметров тренировочных занятий, отдельных упражнений или их комбинации. С одной стороны, эти входные данные могут быть приняты как ввод от пользователя или от оператора тренажера ходьбы. С другой стороны, входные данные могут быть приняты как ввод от тренажера ходьбы. Входные данные могут быть приняты посредством выбранного ввода на графическом пользовательском интерфейсе, как ввод данных, как электрические сигналы или аналогичные входы. Подобно ручному устройству управления и видимым индикаторам графический пользовательский интерфейс может быть использован для достижения тех же результатов и преимуществ:
• описание упражнений, которые должен выполнять пациент,
• инструктаж пациента,
• выполнение и повторение упражнений,
• регулировка тренажера ходьбы посредством разматывания и/или наматывания троса и/или регулировки веса противовеса,
• регулировка тренажера ходьбы для инициирования тренировочного занятия и во время тренировочных занятий,
• управление тренажером ходьбы во время тренировки, например, посредством консультации с обслуживающим персоналом или врачами, чтобы тренировка прошла надежно и оптимально
• и т.д.
Если происходит дооснащение уже имеющейся подъемной системы для пациента тренажером ходьбы, то уже имеющийся графический пользовательский интерфейс может быть также дооснащен соответствующим образом, чтобы включить в себя отображение и/или прием ввода по меньшей мере одного значения, соответствующего значениям, выбранным из группы, состоящей из веса противовеса, веса пациента, тренировочной нагрузки и фактического действующего веса.
В одном аспекте управление тренажером ходьбы может происходить через выпадающие меню. Они могут быть встроены в уже существующие графические пользовательские интерфейсы или быть использованы как автономные графические пользовательские интерфейсы. Навигация в меню может происходить посредством взаимодействия через сенсорный экран, через ручное устройство управления или иные адаптированные средства ввода. "Режим" тренажера ходьбы может быть показан в выпадающем меню, чтобы пользователь всегда был информирован о текущем режиме. Если тренажер ходьбы устанавливают на уже имеющуюся подъемную систему для пациента, то "режим" может показывать режим тренировки ходьбы.
Графический пользовательский интерфейс может быть также использован для выбора между значениями и задания значений, входящих в группу, состоящую из веса противовеса, веса пациента, тренировочной нагрузки и фактического действующего веса.
Цель изобретения может быть достигнута посредством компьютерного программного продукта, содержащего команды, заставляющие тренажер ходьбы выполнять этапы способа тренировки нервно-мышечных функций с использованием тренажера ходьбы.
Тренажер ходьбы может быть обеспечен встраиванием этапов способа в существующие подъемные системы для пациента, имеющие двигатель и датчик веса. Это может быть достигнуто дооснащением уже существующего программного обеспечения компьютерным программным продуктом.
Цель изобретения может быть достигнута посредством машиночитаемых носителей, хранящих этот компьютерный программный продукт.
Этот вариант осуществления изобретения может дополнительно поддерживать результаты и преимущества тренажера ходьбы и способа тренировки нервно-мышечных функций с использованием тренажера ходьбы.
Краткое описание чертежей
Варианты осуществления изобретения будут раскрыты на чертежах, на которых:
Фиг. 1 иллюстрирует один вариант осуществления элементов тренажера ходьбы.
Фиг. 2 иллюстрирует один вариант осуществления троса с видимыми индикаторами.
Фиг. 3 иллюстрирует силы, приложенные к тросу, когда тренажер ходьбы работает соответственно в динамическом режиме и статическом режиме.
Фиг. 4 иллюстрирует один вариант осуществления способа тренировки нервно-мышечных функций с использованием тренажера ходьбы.
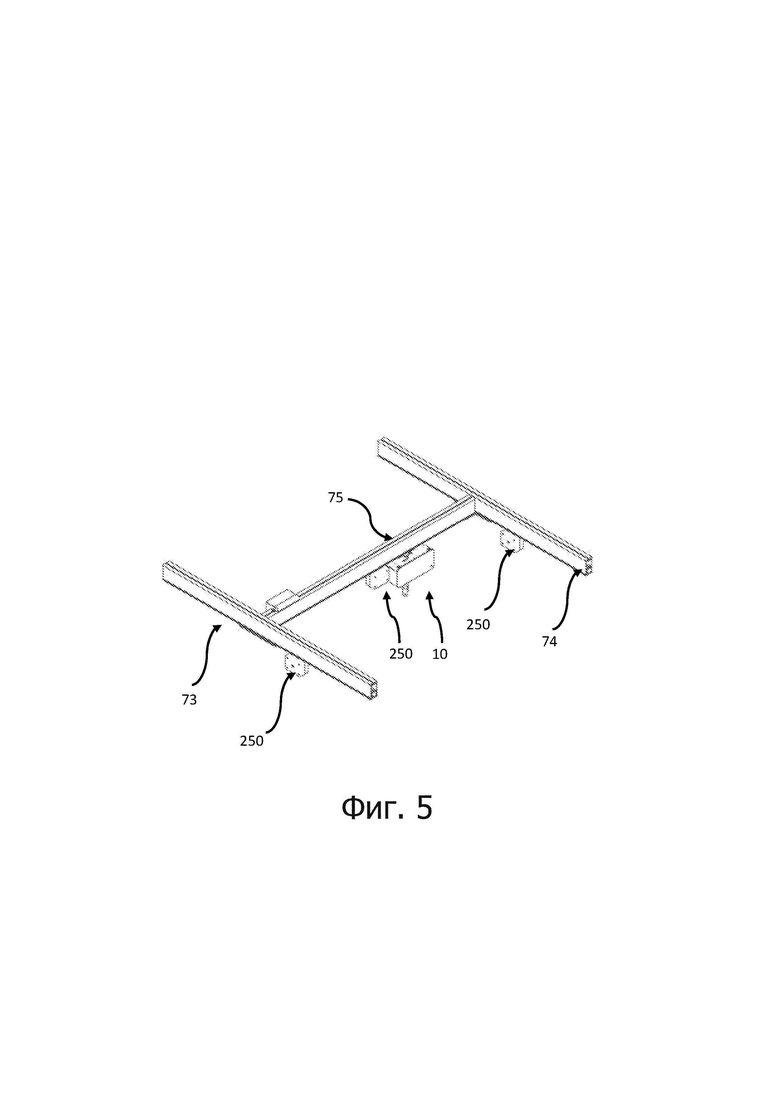
Фиг. 5 иллюстрирует один вариант осуществления элементов тренажера ходьбы с тормозами и приводным двигателем.
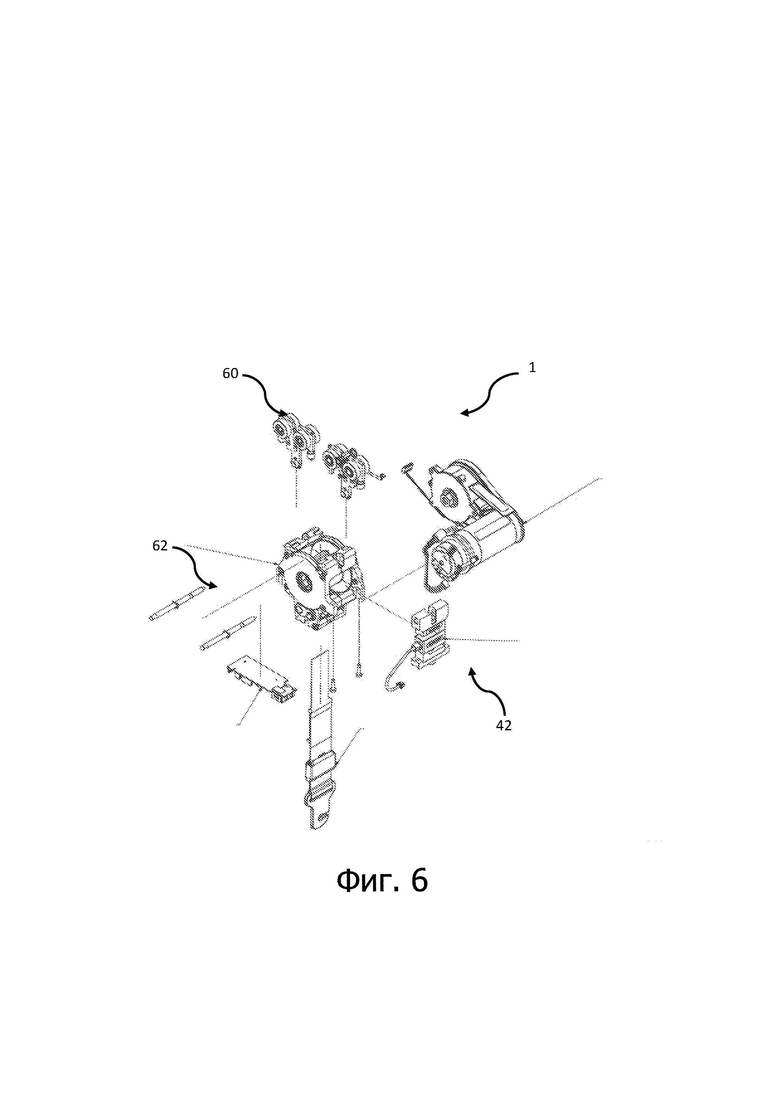
Фиг. 6 иллюстрирует один вариант осуществления элементов тренажера ходьбы.
Список ссылочных обозначений
1 тренажер ходьбы
10 подъемная система
12 тросовый барабан
14 трос
16 тросовый наконечник
20 электродвигатель
22 устройство управления двигателем
30 блок управления
32 сигнал управления двигателем
40 датчик веса
42 сигнал датчика веса
50 процессор
60 фиксированная подвеска
62 средство уравновешивания сил
70 рельсовое крепление
72 потолочный рельс
73 первый потолочный рельс
74 второй потолочный рельс
75 третий потолочный рельс
92 графический пользовательский интерфейс
94 компьютерный программный продукт
96 машиночитаемый носитель
100 способ
102 определение
104 предоставление
106 измерение
108 сравнение
110 выдача команды
112 вычисление
202 вес противовеса
204 вес пациента
206 тренировочная нагрузка
208 фактический действующий вес
210 направление приведения в движение
250 тормозное устройство
Осуществление изобретения
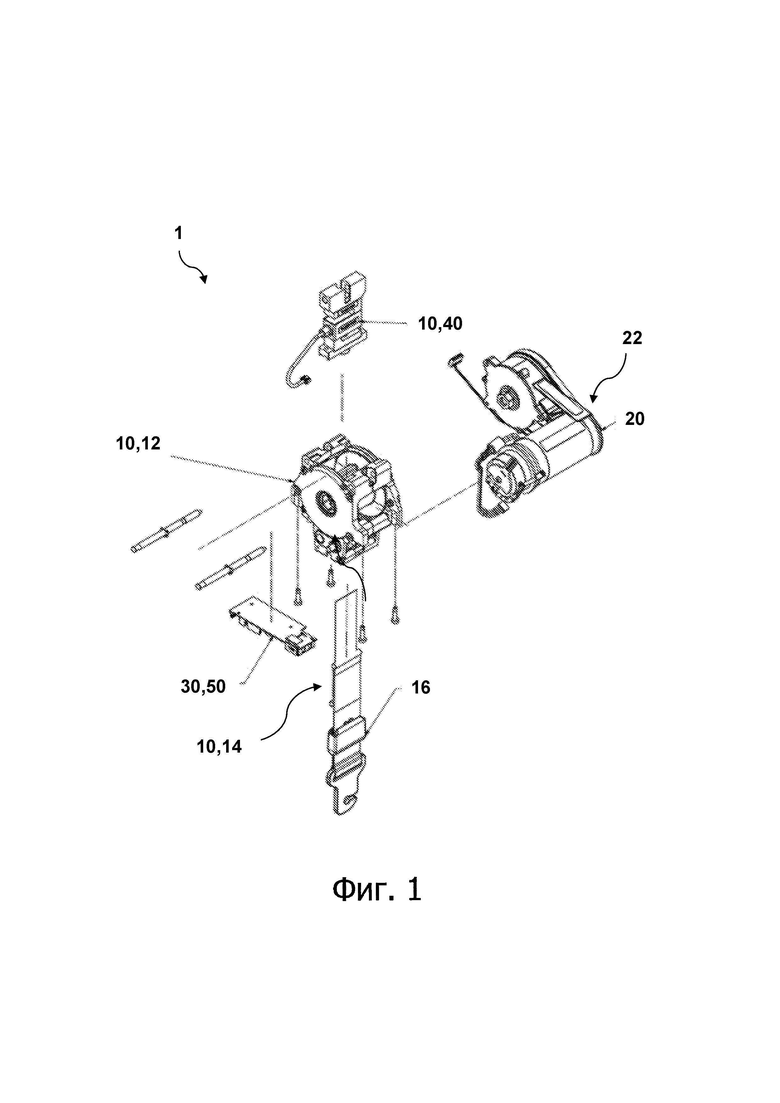
На фиг. 1 показан один вариант осуществления элементов тренажера 1 ходьбы для тренировки нервно-мышечных функций. Тренажер 1 ходьбы содержит подъемную систему 10, которая включает в себя вращаемый тросовый барабан 12 и трос 14. Трос 14 может быть выполнен с возможностью наматывания на вращаемый тросовый барабан 12. Трос имеет тросовый наконечник 16, который может быть выполнен с возможностью взаимодействия с пациентом, причем здесь показана пряжка, смонтированная на тросовом наконечнике 16 для дальнейшего крепления к стропе, ремню или аналогичным узлам, выполненным с возможностью удержания пациента или ношения пациентом.
Тренажер 1 ходьбы дополнительно содержит электродвигатель 20. Электродвигатель может быть выполнен с возможностью осевого сцепления с вращаемым тросовым барабаном 12. Электродвигатель может быть дополнительно выполнен с возможностью приведения в движение вращаемого тросового барабана 12 в прямом и обратном направлении для разматывания троса 14 с тросового барабана 12 или для наматывания троса на этот барабан.
Тренажер 1 ходьбы дополнительно содержит датчик 40 веса, процессор 50 и устройство 22 управления двигателем. Датчик 40 веса может быть выполнен с возможностью выдачи количественного сигнала датчика веса на процессор 50. Датчик 40 веса может содержать динамометрический датчик, выполненный в виде преобразователя, преобразующего приложенное усилие в электрический сигнал.
Процессор 50 может быть выполнен с возможностью приема количественного сигнала датчика веса и с возможностью вычисления сигнала управления двигателем на основе принятого количественного сигнала датчика веса. Процессор 50 может быть выполнен с возможностью выдачи сигнала управления двигателем на устройство 22 управления двигателем. Устройство 22 управления двигателем может содержать зубчатую передачу и может быть выполнено с возможностью приема сигнала управления двигателем для установки вычисленного направления приведения в движение на двигателе. Подъемная система может быть свободно навешена на датчик 40 веса.
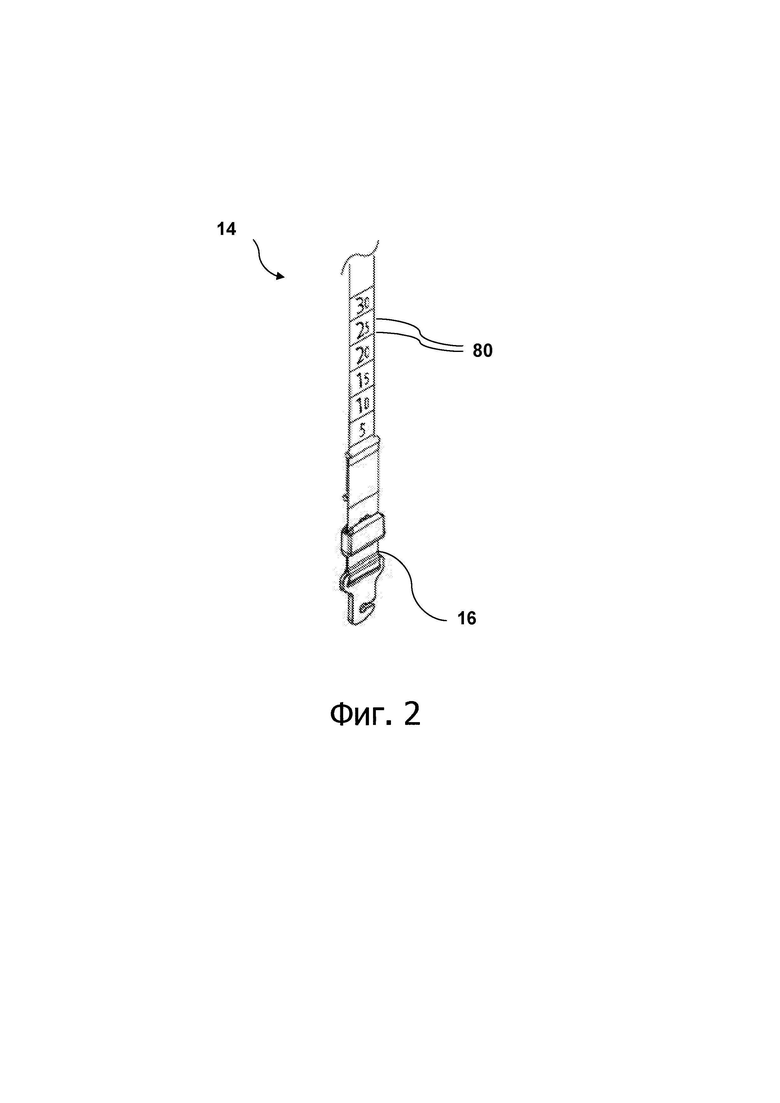
На фиг. 2 показан один вариант осуществления троса 14 с видимыми индикаторами 80. Трос 14 имеет тросовый наконечник 16, который может быть выполнен с возможностью взаимодействия с пациентом, причем здесь, как на фиг. 1, показана пряжка, смонтированная на тросовом наконечнике 16 для дальнейшего крепления к стропе, ремню или аналогичным узлам, выполненным с возможностью удержания пациента или ношения пациентом.
Видимые индикаторы могут быть использованы для измерения фактической длины разматывания или наматывания троса 14 и могут быть использованы для обучения пациента упражнениям и для достижения более качественного повторения упражнений, например, упражнение может быть описано как сгибание или разгибание ног для достижения смещения троса на расстояние 10 см, указатель А-С и т.д. Здесь видимые индикаторы 80 представлены в виде цифр и линий и могут показывать смещение в сантиметрах, однако могут быть использованы и другие индикаторы.
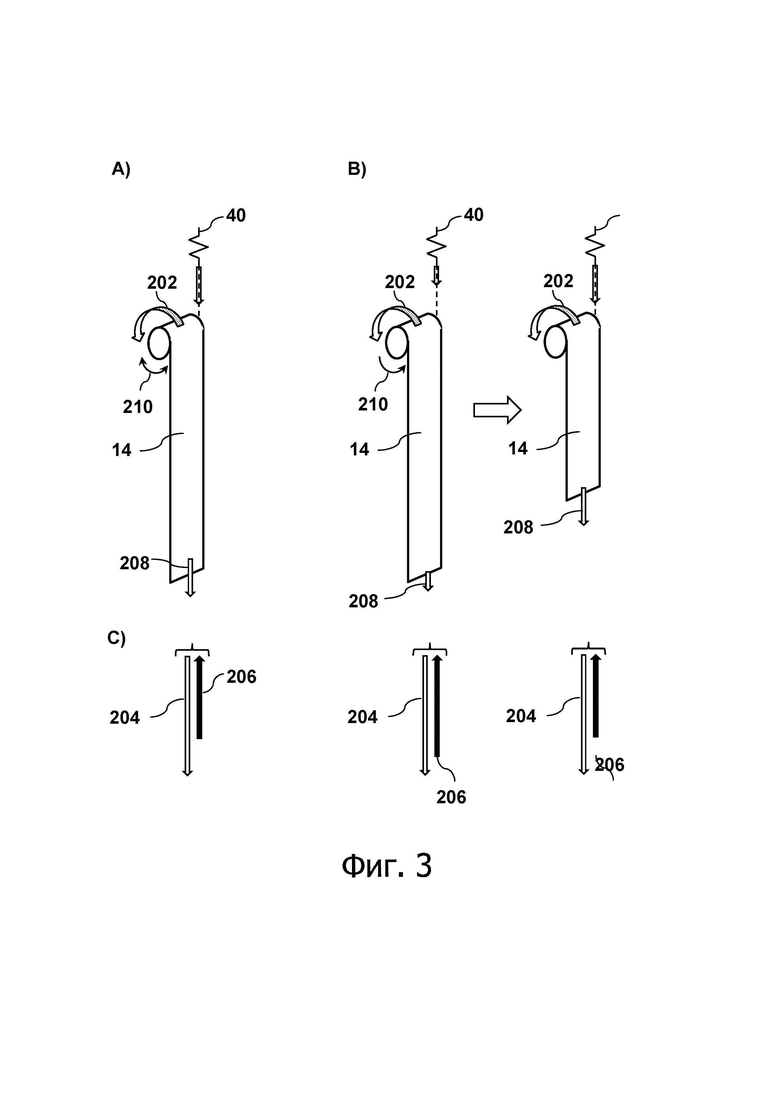
На фиг. 3 показаны силы, приложенные к тросу 14, когда тренажер ходьбы работает в динамическом режиме. На фиг. 3А показано, как к тросу 14 приложены две противодействующие силы. Вес 202 противовеса приложен к тросу 14 со стороны электродвигателя, а фактический действующий вес 208 приложен к тросу 14 со стороны пациента. Датчик 40 веса измеряет фактический действующий вес 208, приложенный к тросу 14 со стороны пациента.
В зависимости от двух значений противодействующих сил 202, 208, приложенных к тросу 14, и от того, как они уравновешивают друг друга, определяют направление 210 приведения в движение электродвигателя, входящего в состав тренажера ходьбы. Если противодействующие силы уравновешивают друг друга, то скорость движения может быть задана равной нулю.
Фиг. 3В иллюстрирует случай, когда фактический действующий вес 208, приложенный к тросу 14 со стороны пациента, меньше веса 202 противовеса, приложенного к тросу 14 со стороны электродвигателя. В этом случае задание направления 210 приведения в движение электрического двигателя, входящего в состав тренажера ходьбы, происходит так, чтобы уменьшать длину троса до тех пор, пока фактический вес 208, действующий на трос 14 со стороны пациента, не станет равным заданному весу 202 противовеса. Это может произойти, когда пациент переходит из согнутого положения в распрямленное, например, для спины или ног, при переходе от плоского положения стопы к положению на носках, при подъеме на ступеньку или аналогичных упражнениях.
Фиг. 3С иллюстрирует, как может быть передан вес пациента 204 и как тренировочная нагрузка 206, оказываемая пациентом, приводит к фактическому весу 208, действующему на трос 14 со стороны пациента.
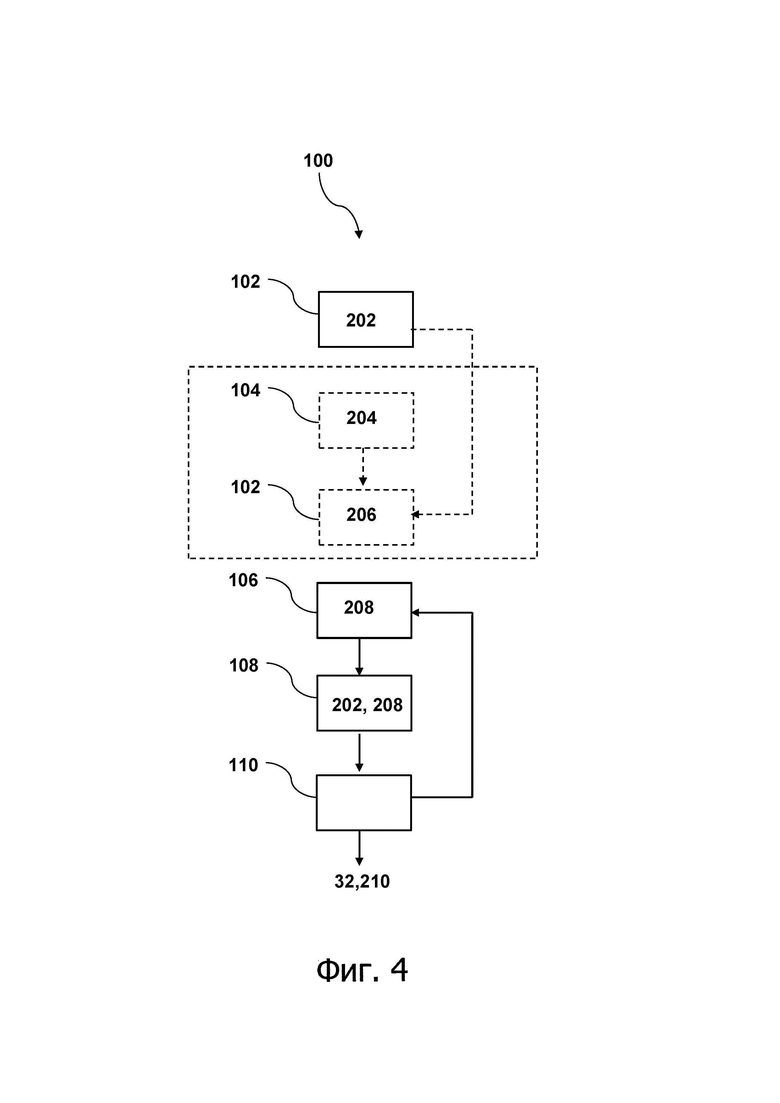
Фиг. 4 иллюстрирует два варианта осуществления способа 100 для тренировки нервно-мышечных функций посредством тренажера ходьбы.
Показан один вариант осуществления изобретения, содержащий операции, показанные сплошными линиями. Этот способ содержит операцию определения 102 веса 202 противовеса, который должен действовать на трос со стороны электродвигателя, и непрерывно выполняемые операции измерения 106 посредством датчика веса фактического веса 208, действующего на трос со стороны пациента, сравнения 108 фактического действующего веса 208 с определенным весом 202 противовеса и выдачи 110 на устройство управления двигателем команды направления 210 приведения в движение посредством выдачи сигнала 32 управления двигателем. Направление 210 приведения в движение основано на результате сравнения фактического действующего веса 208 с определенным весом противовеса. Эти непрерывно выполняемые операции могут происходить до тех пор, пока определенный вес 202 противовеса, действующий на трос со стороны электродвигателя, и фактический действующий вес 208 не уравновесят друг друга, но так, что поддерживают постоянное значение для веса 202 противовеса.
Другой вариант осуществления изобретения, показанный на фиг.4, содержит, помимо действий, показанных сплошными линиями и описанных выше, дополнительные действия, показанные пунктирными линиями. Этот вариант осуществления изобретения содержит дальнейшую операцию предоставления 104 веса пациента 204 и операцию определения 102 тренировочной нагрузки 206 для пациента, причем тренировочную нагрузку 206 задают как разницу между предоставленным весом пациента 204 и определенным весом 202 противовеса.
На фиг. 5 показан тренажер ходьбы, содержащий тормозное устройство 250. Регулируемое тормозное усилие может быть задано тормозным устройством 250.
Тормозное устройство 250 позволяет зафиксировать положение подъемной системы 10 в потолочных рельсах 72. Это происходит в том случае, когда задано максимальное тормозное усилие.
Тормозное устройство 250 также позволяет задать тормозное усилие на таком уровне, при котором пациент может перемещать подъемную систему 10 по потолочным рельсам 72, а система оказывает сопротивление в форме тормозного усилия.
Это позволяет выполнять более сложные тренировочные упражнения, включающие более широкий набор движений пациента.
Тренажер ходьбы содержит первый 73 и второй 74 потолочные рельсы, смонтированные параллельно друг другу, и третий потолочный рельс 75, соединяющий первый и второй потолочные рельсы и смонтированный с возможностью скольжения на первом и втором потолочных рельсах. Подъемная система смонтирована с возможностью скольжения на третьем потолочном рельсе 75.
Эти потолочные рельсы позволяют свободно перемещать подъемную систему в плоскости, параллельной потолку. Это позволяет выполнять с пациентом более широкий набор упражнений. Особенно в связи с вышеупомянутым двигателем и/или тормозным устройством.
На фиг. 6 показан вариант осуществления тренажера ходьбы, содержащий датчик 40 веса и фиксированную подвеску 60. Фиксированная подвеска 60 содержит средство 62 уравновешивания сил. Датчик 40 веса и фиксированная подвеска 60 расположены на подъемной системе сбоку, что уменьшает конструктивную высоту тренажера ходьбы.
Фиксированная подвеска удерживает подъемную систему в подвешенном состоянии. Фиксированная подвеска содержит сквозные отверстия в рельсовом креплении и подъемной системе и штифт. Штифт устанавливают в сквозные отверстия.
На одной стороне подъемной системы смонтирован датчик веса. На другой стороне подъемной системы предусмотрена фиксированная подвеска. Фиксированная подвеска содержит средство уравновешивания сил, так что полный вес, воспринимаемый фиксированной подвеской и датчиком веса, может быть вычислен на основе веса, измеренного датчиком веса. Средство уравновешивания сил содержит штифт, вокруг которого может поворачиваться подъемная система, когда вес, измеряемый датчиком веса, растет.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ТРЕНИРОВКИ ВЕСТИБУЛЯРНЫХ НАВЫКОВ СПОРТСМЕНА | 2017 |
|
RU2657994C1 |
| ГИМНАСТИЧЕСКИЙ ТРЕНАЖЕР ДЛЯ ТЯЖЕЛОЙ АТЛЕТИКИ | 2021 |
|
RU2794297C1 |
| Способ определения величины динамической нагрузки на группы мышц спортсмена в процессе выполнения упражнений на грузоблочном тренажере | 2023 |
|
RU2826347C1 |
| МОБИЛЬНЫЙ КОМПЬЮТЕРНЫЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ОПЕРАТИВНЫХ СОТРУДНИКОВ МЧС | 2006 |
|
RU2316824C2 |
| Спортивный тренажер | 2016 |
|
RU2615946C1 |
| УСТРОЙСТВО И СПОСОБ ФИЗИЧЕСКОЙ ПОДГОТОВКИ | 2006 |
|
RU2378029C2 |
| СПОРТИВНЫЙ ТРЕНАЖЕР ДЛЯ СОЗДАНИЯ ПЕРЕМЕННОЙ ДИНАМИЧЕСКОЙ НАГРУЗКИ | 2017 |
|
RU2658805C1 |
| ПРОПРИОЦЕПТИВНОЕ/КИНЕСТЕТИЧЕСКОЕ УСТРОЙСТВО И СПОСОБ | 2003 |
|
RU2343946C2 |
| ТРЕНАЖЁР И СПОСОБ ВЫПОЛНЕНИЯ УПРАЖНЕНИЙ | 2017 |
|
RU2660300C1 |
| СИСТЕМА ПОДВИЖНОСТИ КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2247432C2 |
Группа изобретений относится к средствам для тренировки нервно-мышечных функций. Представлен тренажер ходьбы для тренировки нервно-мышечных функций, содержащий подъемную систему с вращаемым тросовым барабаном, тросом, выполненным с возможностью наматывания на вращаемый тросовый барабан, и с тросовым наконечником, на котором смонтирована пряжка для дальнейшего крепления к узлам, выполненным с возможностью взаимодействия с пациентом. При этом подъемная система смонтирована на потолочном рельсе и свободно подвешена на двух датчиках веса для измерения веса, приложенного к тросу со стороны пациента, расположенных на подъемной системе сбоку, чтобы уменьшить конструктивную высоту тренажера ходьбы, причем датчики веса выполнены с возможностью выдачи количественного сигнала датчика веса. Также тренажер содержит электродвигатель, выполненный с возможностью осевого сцепления с вращаемым тросовым барабаном и выполненный с возможностью приведения в движение указанного вращаемого тросового барабана в прямом и обратном направлении приведения в движение для разматывания троса с тросового барабана или наматывания троса на этот барабан, видимые индикаторы для измерения фактической длины разматывания и наматывания троса при использовании во время тренировочных занятий. Имеются блок управления и процессор, выполненный с возможностью приема количественного сигнала датчика веса. Указанный процессор выполнен с возможностью вычисления и вывода сигнала управления двигателем при установке вычисленного направления приведения в движение на двигателе на основе принятого количественного сигнала датчика веса и на основе результата сравнения фактического количественного сигнала веса с весом противовеса, определенным перед началом тренировки. Двигатель снабжен устройством управления, выполненным с возможностью приема с процессора сигнала управления двигателем и установки вычисленного направления приведения в движение на двигателе, так чтобы значение определенного веса противовеса, приложенного к тросу со стороны электродвигателя, поддерживать постоянным. Также описан способ использования тренажера для ходьбы. Достигается ускорение реабилитации пациента с возможностью регулировки в соответствии со степенью восстановления. 2 н. и 4 з.п. ф-лы, 6 ил.
1. Тренажер ходьбы для тренировки нервно-мышечных функций, содержащий:
- подъемную систему с вращаемым тросовым барабаном, тросом, выполненным с возможностью наматывания на вращаемый тросовый барабан, и с тросовым наконечником, на котором смонтирована пряжка для дальнейшего крепления к узлам, выполненным с возможностью взаимодействия с пациентом, при этом подъемная система смонтирована на потолочном рельсе и свободно подвешена на двух датчиках веса для измерения веса, приложенного к тросу со стороны пациента, расположенных на подъемной системе сбоку, чтобы уменьшить конструктивную высоту тренажера ходьбы, причем датчики веса выполнены с возможностью выдачи количественного сигнала датчика веса;
- электродвигатель, выполненный с возможностью осевого сцепления с вращаемым тросовым барабаном и выполненный с возможностью приведения в движение указанного вращаемого тросового барабана в прямом и обратном направлении приведения в движение для разматывания троса с тросового барабана или наматывания троса на этот барабан, видимые индикаторы для измерения фактической длины разматывания и наматывания троса при использовании во время тренировочных занятий;
- блок управления;
- процессор, выполненный с возможностью приема количественного сигнала датчика веса, причем указанный процессор выполнен с возможностью вычисления и вывода сигнала управления двигателем при установке вычисленного направления приведения в движение на двигателе на основе принятого количественного сигнала датчика веса и на основе результата сравнения фактического количественного сигнала веса с весом противовеса, определенным перед началом тренировки,
- устройство управления двигателем, выполненное с возможностью приема с процессора сигнала управления двигателем и установки вычисленного направления приведения в движение на двигателе, так чтобы значение определенного веса противовеса, приложенного к тросу со стороны электродвигателя, поддерживать постоянным.
2. Тренажер ходьбы по п. 1, содержащий указанные два датчика веса и фиксированную подвеску со средством уравновешивания сил, причем датчики веса и фиксированная подвеска расположены на подъемной системе сбоку, чтобы уменьшить конструктивную высоту тренажера ходьбы.
3. Тренажер ходьбы по п. 1 или 2, в котором каждый из двух датчиков веса включает в себя динамометрический датчик, выполненный в виде преобразователя приложенного усилия в электрический сигнал, являющийся количественным сигналом датчика веса, причем указанный динамометрический датчик представляет собой тензометрический динамометрический датчик.
4. Тренажер ходьбы по любому из пп. 1-3, дополнительно содержащий рельсовое крепление, выполненное с возможностью взаимодействия с потолочным рельсом и с двумя датчиками веса, причем указанные датчики веса присоединены к рельсовому креплению на одном конце и к подъемной системе на другом конце, так чтобы подъемная система была свободно подвешена на двух датчиках веса.
5. Тренажер ходьбы по любому из пп. 1-4, дополнительно содержащий тормозной механизм, выполненный с возможностью торможения с регулируемым тормозным усилием.
6. Способ использования тренажера ходьбы, содержащего электродвигатель, два датчика веса и трос, причем способ содержит следующие операции:
- определение веса противовеса, который должен быть приложен к тросу со стороны электродвигателя;
- непрерывное выполнение операций:
- измерение посредством двух датчиков веса фактического веса, приложенного к тросу;
- сравнение фактического действующего веса с определенным весом противовеса, и
- выдача команды на устройство управления двигателем направления приведения в движение посредством выдачи сигнала управления двигателем на двигатель для установки вычисленного направления приведения в движение на двигателе на основе результата сравнения фактического приложенного веса с определенным весом противовеса, определенным перед началом тренировки, так чтобы значение определенного веса (202) противовеса, приложенного к тросу со стороны электродвигателя (20), поддерживать постоянным.
| US 7883450 B2, 08.02.2011 | |||
| ТЕРАПЕВТИЧЕСКИЙ ТРЕНАЖЕР ДЛЯ ХОДЬБЫ | 2011 |
|
RU2563432C1 |
| ТРЕНАЖЕР ДЛЯ ХОДЬБЫ | 2007 |
|
RU2409342C1 |
| КОМПЬЮТЕРИЗОВАННЫЙ ФИЗИОТЕРАПЕВТИЧЕСКИЙ ТРЕНАЖЕР ДЛЯ ХОДЬБЫ С ИМИТАЦИЕЙ ПЕРЕМЕЩЕНИЯ ПО ЛЕСТНИЦЕ | 2014 |
|
RU2673764C1 |
| US 9801775 B2, 31.10.2017 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| US 6027429 А, 31.10.2017. | |||

