Область техники
Настоящее изобретение относится к расходомеру Кориолиса, с регистрацией разности фаз и/или частоты колебаний, пропорциональных силе Кориолиса, действующей на расходомерную трубку, чтобы получить массовый расход и/или плотность измеряемого флюида.
Уровень техники
Для измерения плотности неизвестного флюида часто используется расходомер Кориолиса.
Расходомер Кориолиса применяется для измерения массового расхода, используя тот факт, что сила Кориолиса, действующая на расходомерную трубку (далее, вибрационная расходомерная трубка обозначается как просто расходомерная трубка), пропорциональна массовому расходу в случае, когда расходомерная трубка, через которую течет измеряемый флюид, закрепляется на обоих концах, и относительно точки закрепления, в направлении, перпендикулярном к направлению потока в расходомерной трубке, возбуждаются колебания.
В противоположность этому, измеритель плотности вибрационного типа используется для измерения плотности измеряемого флюида на основании того факта, что резонансная частота расходомерной трубки (далее, вибрационная расходомерная трубка обозначается как просто расходомерная трубка), через которую протекает флюид, изменяется в зависимости от изменения плотности.
Такой измеритель плотности вибрационного типа имеет основную конструкцию, подобную расходомеру Кориолиса. Поэтому традиционно, конструкция, включающая в себя расходомер Кориолиса для измерения массового расхода измеряемого флюида, использовалась для одновременного измерения и массового расхода, и плотности.
Таким образом, если измеряется период или частота, с которой колеблется в резонансе расходомерная трубка, то может быть измерена и плотность флюида. По форме расходомерные трубки в основном представляют собой прямые и изогнутые трубки.
Когда используется расходомерная трубка изогнутого типа, то расходомерная трубка, через которую протекает измеряемый флюид, закрепляется на обоих концах, и в центральном участке закрепленной расходомерной трубки возбуждаются колебания в направлении, перпендикулярном линии закрепления, для измерения массового расхода в симметричных положениях между крайними участками закрепления и центральным участком расходомерной трубки.
Когда частота возбуждающих колебаний расходомерной трубки делается равной собственной частоте расходомерной трубки, то получается постоянная приводная частота, соответствующая плотности измеряемого флюида и, следовательно, расходомерная трубка может возбуждаться при малой мощности привода. Поэтому расходомерная трубка обычно возбуждается на собственной частоте.
Когда плотность измеряется с использованием изогнутой расходомерной трубки, как описано выше, в качестве приводного средства для управления расходомерной трубкой обычно используется комбинация индукционной катушки и магнита.
Индукционная катушка и магнит предпочтительно закрепляются в положениях, которые не смещаются в направлении колебаний расходомерной трубки, поскольку изменение пространственного соотношения между катушкой и магнитом минимизируется. Поэтому в случае изогнутой трубки расходомера Кориолиса, включающего в себя две параллельные расходомерные трубки, две параллельные расходомерные трубки скрепляются так, чтобы между ними размещались катушка и магнит. Поэтому конструкция выполняется так, чтобы две противоположные расходомерные трубки были отделены друг от друга на промежуток, позволяющий разместить, по меньшей мере, катушку и магнит.
Из расходомеров Кориолиса, включающих в себя две расходомерные трубки, расположенные в параллельных плоскостях, расходомер Кориолиса, имеющий большой диаметр, или расходомер Кориолиса, имеющий большую жесткость трубки, требует увеличения мощности приводного средства и, следовательно, размещения между двумя расходомерными трубками крупногабаритного приводного средства. Поэтому конструкция выполняется так, чтобы промежуток между расходомерными трубками был обязательно увеличен даже на закрепленном крайнем участке, который является основным участком расходомерных трубок.
Как показано на Фиг.13, расходомер 1 Кориолиса общеизвестной конструкции включает в себя U-образные измерительные трубки, детектор 4 для двух U-образных измерительных трубок 2 и 3 и преобразователь 5.
Детектор 4 для измерительных трубок 2 и 3 включает в себя вибратор 6 для возбуждения резонансных колебаний измерительных трубок 2 и 3, левый датчик 7 скорости для регистрации скорости колебаний, создаваемых на левой стороне измерительных трубок 2 и 3, колеблющихся посредством вибратора 6, правый датчик 8 скорости для регистрации скорости колебаний, создаваемых на правой стороне измерительных трубок 2 и 3, колеблющихся посредством вибратора 6, и температурный датчик 9 для регистрации температуры измеряемого флюида, который течет через измерительные трубки 2 и 3 при регистрации скорости колебаний. Вибратор 6, левый датчик 7 скорости, правый датчик 8 скорости и температурный датчик 9 соединяются с преобразователем 5.
Измеряемый флюид, который течет через измерительные трубки 2 и 3 расходомера 1 Кориолиса, течет от правой стороны измерительных трубок 2 и 3 (сторона, на которой предоставляется правый датчик 8 скорости) к их левой стороне (сторона, на которой предоставляется левый датчик 7 скорости).
Поэтому сигнал скорости, регистрируемый правым датчиком 8 скорости, представляет собой сигнал скорости измеряемого флюида с впускной стороны, втекающего в измерительные трубки 2 и 3. Сигнал скорости, регистрируемый левым датчиком 7 скорости, представляет собой сигнал скорости измеряемого флюида с выпускной стороны, вытекающего из измерительных трубок 2 и 3.
Преобразователь 5 расходомера Кориолиса включает в себя блок 10 управления приводом, блок 11 измерения фазы и блок 12 измерения температуры.
Преобразователь 5 расходомера Кориолиса имеет блочную структуру, как показано на Фиг.14.
То есть преобразователь 5 расходомера Кориолиса имеет порт 15 ввода и вывода. Клемма 16 вывода приводного сигнала, включенная в блок 10 управления приводом, предоставляется в порту 15 ввода и вывода. Блок 10 управления приводом выводит сигнал заданной моды колебаний от клеммы 16 вывода приводного сигнала на вибратор 6, прикрепленный к измерительным трубкам 2 и 3, чтобы возбудить резонансные колебания измерительных трубок 2 и 3.
И левый датчик 7 скорости, и правый датчик 8 скорости, которые регистрируют скорости колебаний, могут быть датчиками ускорения.
Клемма 16 вывода приводного сигнала соединяется со схемой 18 привода через усилитель 17. Схема 18 привода создает приводной сигнал для возбуждения резонансных колебаний измерительных трубок 2 и 3 и выводит приводной сигнал на усилитель 17. Усилитель усиливает входной приводной сигнал и выводит приводной сигнал на клемму 16 вывода приводного сигнала. Приводной сигнал от усилителя 17 выводится с помощью клеммы 16 вывода приводного сигнала на вибратор 6.
Клемма 19 ввода левого сигнала скорости, к которой подводится сигнал регистрации скорости колебаний, создаваемых на левой стороне измерительных трубок 2 и 3, колеблющихся посредством вибратора 6, предоставляется в порту 15 ввода и вывода. Клемма 19 левого сигнала скорости включена в блок 11 измерения фазы.
Клемма 20 ввода правого сигнала скорости, к которой подводится сигнал регистрации скорости колебаний, создаваемых на правой стороне измерительных трубок 2 и 3, колеблющихся посредством вибратора 6, предоставляется в порту 15 ввода и вывода. Клемма 20 ввода правого сигнала скорости включена в блок 11 измерения фазы.
Блок 11 измерения фазы выполняет A/D преобразование сигналов колебаний пары датчиков скорости в случае, когда сигнал заданной моды колебаний выводится от клеммы 16 вывода приводного сигнала на вибратор 6, прикрепленный к измерительным трубкам 2 и 3, чтобы возбудить колебания измерительных трубок 2 и 3 вибратором 6, чтобы тем самым выполнить цифровое преобразование, и затем получает разность фаз между преобразованными сигналами.
Клемма 19 ввода левого сигнала скорости соединяется с входной клеммой усилителя 21. Выходная клемма усилителя 21 соединяется с A/D преобразователем 22. A/D преобразователь 22 преобразует в цифровое значение аналоговый сигнал, полученный посредством усиления усилителем 21 выходного сигнала колебаний от клеммы 19 ввода левого сигнала скорости.
A/D преобразователь 22 соединяется с вычислительным устройством 23.
Кроме того, клемма 20 ввода правого сигнала скорости соединяется с входной клеммой усилителя 24. Выходная клемма усилителя 24 соединяется с A/D преобразователем 25. A/D преобразователь 25 преобразует в цифровое значение аналоговый сигнал, полученный усилением усилителем 24 выходного сигнала колебаний от клеммы 20 ввода правого сигнала скорости.
Кроме того, выходной цифровой сигнал от A/D преобразователя 25 вводится на вычислительное устройство 23.
Кроме того, клемма 26 ввода температурного сигнала, включенная в блок 11 измерения температуры, к которой подводится зарегистрированное значение от температурного датчика 9, предоставляется в порту 15 ввода и вывода. Блок 11 измерения температуры выполняет компенсацию температуры трубки исходя из зарегистрированной температуры, полученной температурным датчиком 9, который предоставляется в измерительных трубках 2 и 3, и регистрирует внутреннюю температуру измерительных трубок 2 и 3.
В качестве температурного датчика 9 обычно используется резистивный датчик температуры, значение сопротивления которого измеряется, чтобы тем самым рассчитать температуру.
Клемма 26 ввода температурного сигнала соединяется со схемой 27 измерения температуры. Схема 27 измерения температуры вычисляет внутреннюю температуру измерительных трубок 2 и 3 на основании значения сопротивления, выводимого от температурного датчика 9. Внутренняя температура измерительных трубок 2 и 3, которая рассчитывается схемой 27 измерения температуры, вводится в вычислительное устройство 23.
В способе измерения фазы, используя расходомер 1 Кориолиса так, как описано выше, вибратором 6, прикрепленным к измерительным трубкам 2 и 3, возбуждаются колебания измерительных трубок 2 и 3 на основной моде. Когда измеряемый флюид втекает в измерительные трубки 2 и 3, в то время как возбуждаются колебания, в измерительных трубках 2 и 3 возбуждается синфазная мода колебаний.
Поэтому сигнал (сигнал скорости впускной стороны) от правого датчика 8 скорости и сигнал (сигнал скорости выпускной стороны) от левого датчика 7 скорости в расходомере Кориолиса 1 выводятся в виде двух наложенных друг на друга сигналов. Выходной сигнал в виде двух наложенных друг на друга сигналов включает в себя не только сигнал расхода, но также и большое количество лишних шумовых компонентов. Кроме того, частота изменяется, например, в зависимости от изменения плотности измеряемого флюида.
Поэтому необходимо удалить лишний сигнал из сигналов от правого датчика 8 скорости и левого датчика 7 скорости. Однако очень трудно удалить лишний сигнал из сигналов от правого датчика 8 скорости и левого датчика 7 скорости для расчета фазы.
Кроме того, от расходомера 1 Кориолиса часто требуются очень точное измерение и высокоскоростной отклик. Чтобы удовлетворить таким требованиям, необходимо иметь вычислительное устройство, пригодное для очень сложного расчета и имеющее большую производительность и, следовательно, сам расходомер 1 Кориолиса становится очень дорогим.
Таким образом, расходомер 1 Кориолиса требует наличие способа измерения разности фаз, использующего и оптимальный фильтр, всегда соответствующий измерительной частоте, и высокоскоростной способ вычисления.
В обычных способах измерения разности фаз для расчета расхода способ удаления шума посредством фильтрации подразделяется на способ, использующий аналоговый фильтр, и способ, использующий цифровой фильтр.
Способ, использующий аналоговый фильтр, может быть относительно недорогим (см., например, JP 02-66410 A и JP 10-503017 A). Однако JP 02-66410 A и JP 10-503017 A имеют ограниченную возможность улучшения эффективности фильтра и, следовательно, имеется проблема в том, что фильтр может оказаться не удовлетворительным для расходомера Кориолиса.
В последние годы было разработано большое количество расходомеров Кориолиса, использующих цифровую обработку сигналов, и был разработан способ, использующий цифровой фильтр как способ обработки фильтрацией для удаления шума при обычных способах измерения разности фаз для вычисления расхода.
Примеры расходомеров Кориолиса обычных типов, использующих цифровую обработку сигналов, включают в себя способ измерения фазы, использующий Фурье преобразование (см., например, JP 2799243 В), и способ выбора оптимального табличного соответствия для входной частоты из таблиц фильтрации, включающих в себя режекторную фильтрацию и полосовую фильтрацию для измерения фазы (см., например, JP 2930430 В и JP 3219122 В).
<<Способ Измерения Фазы, использующий Фурье преобразование>>
Преобразователь расходомера Кориолиса, основанный на способе измерения фазы, использующем Фурье преобразование, имеет блочную конструкцию, как показано на Фиг.15.
На Фиг.15 клемма 19 ввода левого сигнала скорости, предоставленная в порту 15 ввода и вывода, на которую вводится регистрируемый сигнал скорости колебаний (сигнал скорости выпускной стороны), который создается на левой стороне измерительных трубок 2 и 3, колеблющихся посредством вибратора 6, и который регистрируется левым датчиком 7 скорости, соединяется с фильтром 30 нижних частот. Фильтр 30 нижних частот представляет собой схему для выделения, с помощью частотного фильтра, только низкочастотного левого сигнала скорости (сигнал скорости выпускной стороны) из левого сигнала скорости (сигнал скорости выпускной стороны), выводимого от левого датчика 7 скорости, регистрирующего скорость колебаний, создаваемых на левой стороне измерительных трубок 2 и 3 в случае, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6.
Фильтр 30 нижних частот соединяется с A/D преобразователем 31. A/D преобразователь 31 преобразует в цифровой сигнал левый сигнал скорости, который является аналоговым сигналом, выводимым от фильтра 30 нижних частот. Левый сигнал скорости, полученный как цифровой сигнал преобразованием A/D преобразователем 31, вводится на модуль 32 измерения разности фаз.
A/D преобразователь 31 соединяется с синхронизирующим генератором 33. Синхронизирующий генератор 33 обеспечивает синхронизацию частоты дискретизации, М-кратной (М - натуральное число) входной частоте.
С другой стороны, клемма 20 ввода правого сигнала скорости, предоставленная в порту 15 ввода и вывода, на которую вводится регистрируемый сигнал скорости колебаний (сигнал скорости впускной стороны), который создается на правой стороне измерительных трубок 2, и 3, колеблющихся посредством вибратора 6, и который регистрируется правым датчиком 8 скорости, соединяется с фильтром 34 нижних частот. Фильтр 34 нижних частот представляет собой схему для выделения, посредством частотной фильтрации, только низкочастотного правого сигнала скорости (сигнал скорости впускной стороны) из правого сигнала скорости (сигнал скорости впускной стороны), выводимого от правого датчика 8 скорости, регистрирующего скорость колебаний, создаваемых на правой стороне измерительных трубок 2 и 3 в случае, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6.
Фильтр 34 нижних частот соединяется с A/D преобразователем 35. A/D преобразователь 35 преобразует в цифровой сигнал правый сигнал скорости, который является аналоговым сигналом, выводимым от фильтра 34 нижних частот. Правый сигнал скорости, полученный в цифровом виде преобразованием A/D преобразователем 35, вводится на модуль 32 измерения разности фаз.
Кроме того, A/D преобразователь 35 соединяется с синхронизирующим генератором 33. Синхронизирующий генератор 33 обеспечивает синхронизацию частоты дискретизации, М-кратной (М - натуральное число) входной частоте.
Кроме того, клемма 20 ввода правого сигнала скорости, предоставленная в порту 15 ввода и вывода, к которой подводится регистрируемый сигнал скорости колебаний (сигнал скорости впускной стороны), который создается на правой стороне измерительных трубок 2 и 3, колеблющихся посредством вибратора 6, и который регистрируется правым датчиком 8 скорости, соединяется с модулем 36 измерения частоты. Модуль 36 измерения частоты измеряет частоту регистрируемого сигнала скорости колебаний (сигнал скорости впускной стороны), который создается на правой стороне измерительных трубок 2 и 3, колеблющихся посредством вибратора 6, и который регистрируется правым датчиком 8 скорости.
Модуль 36 измерения частоты соединяется с синхронизирующим генератором 33. Частота, измеренная модулем 36 измерения частоты, выводится на синхронизирующий генератор 33. Синхронизация частоты дискретизации, М-кратной (М - натуральное число) входной частоте, создается синхронизирующим генератором 33 и выводится на A/D преобразователи 31 и 35.
Модуль 32 измерения разности фаз, синхронизирующий генератор 33, и модуль 36 измерения частоты включены в вычислительное устройство 40 измерения фазы.
В способе измерения фазы, использующем Фурье преобразование, как показано на Фиг.15, входной сигнал (сигнал скорости впускной стороны) от правого датчика 8 скорости вначале вводится на модуль 36 измерения частоты для измерения частоты. Частота, измеренная модулем 36 измерения частоты, вводится на синхронизирующий генератор 33. Синхронизация частоты дискретизации, М-кратной (М - натуральное число), входной частоте, создается синхронизирующим генератором 33 и вводится на A/D преобразователи 31 и 35.
Кроме того, регистрируемый сигнал скорости колебаний (сигнал скорости выпускной стороны), который создается на левой стороне измерительных трубок 2 и 3 и получается как цифровой сигнал преобразованием A/D преобразователем 31, и регистрируемый сигнал скорости колебаний (сигнал скорости впускной стороны), который создается на правой стороне измерительных трубок 2 и 3 и получается как цифровой сигнал преобразованием A/D преобразователем 35, вводятся на модуль 32 измерения разности фаз. Регистрируемые сигналы подвергаются Фурье преобразованию модулем дискретного Фурье преобразования, включенным в модуль 32 измерения разности фаз, и разность фаз рассчитывается на основании отношения между реальной и мнимой компонентами преобразованных сигналов.
<<Способ измерения фазы с использованием цифрового фильтра>>
Преобразователи расходомера Кориолиса, основанные на способе измерения фазы с использованием цифрового фильтра, описываются в связи со структурными блок-схемами, показанными на Фиг.16 и 17.
Средство селекции частоты, например режекторный фильтр или полосовой фильтр, используется как цифровой фильтр. Отношение S/N для входного сигнала улучшается с использованием средства селекции частоты, например режекторного фильтра или полосового фильтра.
На Фиг.16 показана блочная конструкция преобразователя расходомера Кориолиса, использующего режекторный фильтр в качестве цифрового фильтра.
Порт 15 ввода и вывода, клемма 19 ввода левого сигнала скорости, клемма 20 ввода правого сигнала скорости, фильтры 30 и 34 нижних частот и A/D преобразователи 31 и 35, как показано на Фиг.16, имеют те же самые структуры, что и порт 15 ввода и вывода, клемма 19 ввода левого сигнала скорости, клемма 20 ввода правого сигнала скорости, фильтры 30 и 34 нижних частот, и A/D преобразователи 31 и 35, показанные на Фиг.15 соответственно.
На Фиг.16 A/D преобразователь 31 соединяется с режекторным фильтром 51. Режекторный фильтр 51 селектирует частоту исходя из левого сигнала скорости, который получается как цифровой сигнал преобразованием A/D преобразователем 31, чтобы улучшить отношение S/N выводимого входного сигнала.
Режекторный фильтр 51 соединяется с модулем 52 измерения фазы. Модуль 52 измерения фазы измеряет фазу левого сигнала скорости, который получается как цифровой сигнал преобразованием и который имеет улучшенное отношение S/N благодаря режекторному фильтру 51.
Кроме того, режекторный фильтр 51 соединяется с модулем 53 измерения частоты. Модуль 53 измерения частоты измеряет частоту левого сигнала скорости, который получается как цифровой сигнал преобразованием и который имеет улучшенное отношение S/N благодаря режекторному фильтру 51.
Частота, измеренная модулем 53 измерения частоты, вводится на режекторный фильтр 51.
Кроме того, A/D преобразователь 35 соединяется с режекторным фильтром 54. Режекторный фильтр 54 селектирует частоту исходя из левого сигнала скорости, который получается как цифровой сигнал преобразованием A/D преобразователем 31, чтобы улучшить отношение S/N выводимого входного сигнала.
Режекторный фильтр 54 соединяется с модулем 52 измерения фазы. Модуль 52 измерения фазы измеряет фазу правого сигнала скорости, который получается как цифровой сигнал преобразованием и который имеет улучшенное отношение S/N благодаря режекторному фильтру 54.
Кроме того, частота, измеренная модулем 53 измерения частоты, вводится на режекторный фильтр 54.
На Фиг.16 тактовый генератор 55 используется для синхронизации и подает сигнал на A/D преобразователи 31 и 35, чтобы синхронизировать A/D преобразователь 31 и A/D преобразователь 35 друг с другом.
Режекторные фильтры 51 и 54, модуль 52 измерения разности фаз, модуль 53 измерения частоты и тактовый генератор 55 включены в вычислительное устройство 50 измерения фазы.
На Фиг.17 показана блочная конструкция преобразователя расходомера Кориолиса, использующего полосовой фильтр (BPF) в качестве цифрового фильтра.
Порт 15 ввода и вывода, клемма 19 ввода левого сигнала скорости, клемма 20 ввода правого сигнала скорости, фильтры 30 и 34 нижних частот и A/D преобразователи 31 и 35, как показано на Фиг.17, имеют те же самые конструкции, что и порт 15 ввода и вывода, клемма 19 ввода левого сигнала скорости, клемма 20 ввода правого сигнала скорости, фильтры 30 и 34 нижних частот, и A/D преобразователи 31 и 35, показанные на Фиг.16 соответственно.
На Фиг.17, A/D преобразователь 31 соединяется с полосовым фильтром (BPF) 61. Полосовой фильтр 61 представляет собой схему для выделения с помощью частотной фильтрации только левого сигнала скорости, имеющего установленную частоту (сигнал скорости выпускной стороны) из левого сигнала скорости (сигнал скорости выпускной стороны), который выводится от левого датчика 7 скорости, регистрирующего скорость колебаний, создаваемых на левой стороне измерительных трубок 2 и 3, и который получается как цифровой сигнал преобразованием A/D преобразователем 31 в случае, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6.
Полосовой фильтр 61 соединяется с модулем 62 измерения фазы. Модуль 62 измерения фазы измеряет фазу левого сигнала скорости, который получается как цифровой сигнал в результате преобразования и который имеет улучшенное отношение S/N благодаря полосовому фильтру 61.
Кроме того, полосовой фильтр 61 соединяется с модулем 63 измерения частоты. Модуль 63 измерения частоты измеряет частоту левого сигнала скорости, который получается как цифровой сигнал в результате преобразования A/D преобразователем 31 и который имеет улучшенное отношение S/N благодаря полосовому фильтру 61.
Частота, измеренная модулем 63 измерения частоты, вводится на полосовой фильтр 61.
Кроме того, A/D преобразователь 35 соединяется с полосовым фильтром 64. Полосовой фильтр 64 представляет собой схему для выделения с помощью частотной фильтрации только правого сигнала скорости, имеющего установленную частоту (сигнал скорости впускной стороны) из правого сигнала скорости (сигнал скорости впускной стороны), который выводится от правого датчика 8 скорости, регистрирующего скорость колебаний, создаваемых на правой стороне измерительных трубок 2 и 3, и который получается как цифровой сигнал преобразованием A/D преобразователем 35 в случае, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6.
Полосовой фильтр 64 соединяется с модулем 62 измерения фазы. Модуль 62 измерения фазы измеряет фазу левого сигнала скорости, который получается как цифровой сигнал преобразованием и который имеет улучшенное отношение S/N благодаря полосовому фильтру 64.
Полосовой фильтр 64 соединяется с модулем 63 измерения частоты. Частота, измеренная модулем 63 измерения частоты, вводится на полосовой фильтр 64.
На Фиг.17 тактовый генератор 65 используется для синхронизации, и тактовый сигнал от тактового генератора 65 вводится на A/D преобразователи 31 и 35, чтобы синхронизировать A/D преобразователь 31 и A/D преобразователь 35 друг с другом.
Полосовые фильтры 61 и 64, модуль 62 измерения фазы, модуль 63 измерения частоты и тактовый генератор 65 включены в вычислительное устройство 60 измерения фазы.
[Проблемы, решаемые в соответствии с изобретением]
В способе измерения фазы, использующем Фурье преобразование, как описано в JP 2799243 В, когда входная частота входного регистрируемого сигнала скорости колебаний является постоянной, может быть реализован способ измерения фазы, имеющий очень хорошую частотную селективность, поскольку для селекции частоты используется Фурье преобразование.
Однако в способе, использующем Фурье преобразование, как описано в JP 2799243 В, когда входная частота входного регистрируемого сигнала скорости колебаний изменяется в соответствии с изменением плотности или температуры, необходимо изменить способ преобразования или частоту дискретизации. Поэтому вычислительный цикл, или вычислительный способ изменяются и, следовательно, значение измерения варьируется и таким образом оказывается неустойчивым.
Кроме того, в способе, использующем Фурье преобразование, как описано в JP 2799243 В, когда входная частота входного регистрируемого сигнала скорости колебаний изменяется в соответствии с изменением плотности или температуры, необходимо точно синхронизировать частоту дискретизации с входной частотой входного сигнала скорости колебаний и, следовательно, конструкция значительно усложняется.
Поэтому имеется проблема в том, что когда температура измеряемого флюида быстро изменяется или быстро изменяется плотность вследствие внедрения воздушных пузырей во флюид, точность измерения существенно снижается.
Кроме того, способ, использующий Фурье преобразование, как описано в JP 2799243 В, имеет затруднение в том, что число вычислительных операций становится очень большим вследствие выполнения Фурье преобразования.
В способах селекции оптимального табличного соответствия входной частоте по таблицам фильтрации, включающим в себя режекторную фильтрацию и полосовую фильтрацию для измерения фазы, как описано в JP 2930430 В и JP 3219122 В, когда частота дискретизации поддерживается, конструкция может быть упрощена.
Однако в способе, использующем Фурье преобразование, как описано в JP 2799243 В, способы измерения фазы, использующие цифровой фильтр, как описано в JP 2930430 В и JP 3219122 В, требуют очень большого количества таблиц фильтрации, соответствующих измененным входным частотам, и, следовательно, имеется проблема в том, что потребление памяти вычислительного устройства оказывается слишком большим.
Кроме того, способы измерения фазы, использующие цифровой фильтр, как описано в JP 2930430 В и JP 3219122 В, имеют проблему в том, что трудно выбрать оптимальный фильтр, когда входная частота быстро изменяется.
Кроме того, способы измерения фазы, использующие цифровой фильтр, как описано в JP 2930430 В и JP 3219122 В, имеют проблему в том, что требуется очень большое число вычислений, чтобы улучшить параметры селекции частоты.
Способы измерения фазы, использующие цифровой фильтр, как это описано в JP 2930430 В и JP 3219122 В, имеют следующие проблемы.
Способ не может следовать за изменением входной частоты с большой точностью. То есть очень трудно реализовать измерение в случае, когда плотность измеряемого флюида быстро изменяется вследствие смешивания с воздушными пузырями.
Чтобы улучшить эффективность частотной селекции требуется очень большое количество расчетов. Поэтому трудно реализовать высокоскоростной отклик и, следовательно, способ не подходит для пакетной обработки за короткий промежуток времени.
Потребление памяти вычислительного устройства оказывается большим и, следовательно, конструкция усложняется. Поэтому структура схемы и конструкция усложняются и оказываются очень невыгодными по стоимости.
Если учитывать все факторы, то в любом из стандартных способов измерения фазы, включающих в себя обработку цифровой фильтрацией, шум в полосе частот, отличных от частот труб измерительных трубок 2 и 3, удаляется и, следовательно, переключение таблицы фильтрации, изменение способа расчета и изменение частоты дискретизации должны всегда следовать за частотами измерительных трубок 2 и 3. Поэтому имеется проблема в том, что необходимо выполнить расчет, который оказывается и очень сложным, и требует достаточного быстродействия при исполнении.
Таким образом, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6, то очень вероятно, что будет образовываться вычислительная ошибка при каждом изменении входных частот сигналов скорости колебаний, которые регистрируются правым датчиком 8 скорости для регистрации скорости колебаний, создаваемых на правой стороне измерительных трубок 2 и 3, и левым датчиком 7 скорости для регистрации скорости колебаний, создаваемых на левой стороне измерительных трубок 2 и 3, и, следовательно, имеется проблема в том, что точность измерения окажется очень низкой.
Цель настоящего изобретения состоит в том, чтобы предоставить способ обработки сигналов, устройство обработки сигналов и расходомер Кориолиса, в котором даже если температура измеряемого флюида изменяется, даже когда воздушные пузыри смешиваются с измеряемым флюидом, или даже когда измеряемый флюид быстро изменяется от газообразного состояния до жидкого, измерение всегда может выполняться с неизменной точностью, в котором реализуются измерения фазы и частоты с высоким качеством фильтрации, и может быть существенно сокращено количество вычислительных операций.
[Средство разрешения проблем]
Для разрешения вышеупомянутых проблем, в соответствии с первым объектом настоящего изобретения, способ обработки сигналов для расходомера Кориолиса, в котором, по меньшей мере, одна расходомерная трубка, или пара расходомерных трубок, которая составляет измерительную расходомерную трубку, поочередно возбуждаются под действием вибратора, приводимого в действие приводным устройством, чтобы возбудить колебания, по меньшей мере, одной расходомерной трубки, или пары расходомерных трубок, и, по меньшей мере, одно - разность фаз и частота колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, регистрируется двумя датчиками скорости или датчиками ускорения, которые являются датчиками регистрации колебаний, чтобы тем самым получить, по меньшей мере, одно - массовый расход и плотность измеряемого флюида, включает в себя:
выполнение преобразования частоты, чтобы объединить исходя из произвольной частоты колебаний, каждый из двух сигналов расхода, полученных в результате A/D преобразования входных сигналов с частотой колебаний, пропорциональной силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, которые регистрируются двумя датчиками скорости или датчиками ускорения, чтобы получить композитный частотно-кодированный сигнал;
измерение частоты композитного частотно-кодированного сигнала, связанного, по меньшей мере, с одним из двух датчиков скорости или датчиков ускорения;
передачу сигнала управления исходя из измеренной частоты;
регулировку частоты суммы или разности частотных компонент композитного частотно-кодированного сигнала до постоянного значения;
получение резонансной частоты, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, на основании сигнала управления, расчет плотности измеряемого флюида на основании сигнала управления; и
измерение фазы по сумме или разности частотных компонент композитного частотно-кодированного сигнала, имеющего управляемую частоту.
Для разрешения вышеупомянутых проблем, в соответствии со вторым объектом настоящего изобретения, в способе обработки сигналов в соответствии с первым объектом, преобразование частоты, для объединения исходя из произвольной частоты колебаний, включает в себя:
умножение входного сигнала SINθ1 от одного из двух датчиков скорости или датчиков ускорения на передаваемый сигнал cosθ2 управления; и
фильтрацию выходного сигнала, полученного умножением, посредством частотного фильтра, чтобы выделить только низкочастотный сигнал.
Для разрешения вышеупомянутых проблем, в соответствии с третьим объектом настоящего изобретения, в способе обработки сигналов в соответствии с первым объектом, преобразование частоты для объединения исходя из произвольной частоты колебаний включает в себя:
умножение входного сигнала SINθ1 от одного из двух датчиков скорости или датчиков ускорения на передаваемый сигнал cosθ2 управления; и
фильтрацию выходного сигнала, полученного умножением, посредством частотного фильтра, чтобы выделить только высокочастотный сигнал.
Для разрешения вышеупомянутых проблем, в соответствии с четвертым объектом настоящего изобретения, в способе обработки сигналов в соответствии с первым объектом:
входные сигналы частоты колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, которые регистрируются двумя датчиками скорости или датчиками ускорения, дискретизируются посредством A/D преобразования, чтобы получить цифровые сигналы; и
композитный частотно-кодированный сигнал, полученный преобразованием частоты на основании переданного сигнала управления, управляется так, чтобы частота суммы или разности частотных компонент композитного частотно-кодированного сигнала составляла 1/4 от частоты дискретизации для A/D преобразования.
Для разрешения вышеупомянутых проблем в соответствии с пятым объектом настоящего изобретения, устройство обработки сигналов для расходомера Кориолиса, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая составляет измерительную расходомерную трубку, поочередно возбуждаются посредством вибратора, приводимого в действие приводным устройством, возбуждая колебания, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, и, по меньшей мере, разность фаз и частота колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, регистрируется датчиком скорости или датчиком ускорения, который является датчиком регистрации колебаний, чтобы тем самым получить, по меньшей мере, массовый расход и плотность измеряемого флюида, включает в себя:
трансмиттер 90 для передачи частотно-кодированного сигнала, который является модулируемым;
преобразователь 85 частоты для выполнения преобразования частоты, чтобы добавить (или вычесть) выходную частоту Fx от трансмиттера 90 к (или из) входной частоте входного сигнала, регистрируемого датчиком скорости или датчиком ускорения, и смещения значения частоты, полученного преобразованием частоты, к постоянному значению; и
блок измерения разности фаз для измерения разности фаз преобразованного частотно-кодированного сигнала, выводимого от преобразователя 85 частоты.
Для разрешения вышеупомянутых проблем, в соответствии с шестым объектом настоящего изобретения, устройство обработки сигналов для расходомера Кориолиса, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая составляет измерительную расходомерную трубку, поочередно возбуждаются посредством вибратора, приводимого в действие приводным устройством, чтобы возбудить колебания, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, и, по меньшей мере, одно - разность фаз и частота колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, регистрируется парой датчиков скорости или датчиков ускорения, которые являются парой датчиков регистрации колебаний, чтобы тем самым получить, по меньшей мере, одно - массовый расход и плотность измеряемого флюида, включает в себя:
трансмиттер 120 для передачи частотно-кодированного сигнала, который является модулируемым;
первый блок 110 преобразования частоты для выполнения преобразования частоты, чтобы добавить (или вычесть) выходную частоту θxn от трансмиттера 120 к (или из) частоте θ входного сигнала, полученной преобразованием сигнала одного из пары датчиков регистрации колебаний в цифровой сигнал первым A/D преобразователем 31, чтобы регулировать значение частоты, полученное преобразованием частоты, до постоянного значения; и
второй блок 140 преобразования частоты для выполнения преобразования частоты, чтобы добавить (или вычесть) выходную частоту θxn от трансмиттера 120 к (или из) частоте θ входного сигнала, полученной преобразованием сигнала другого одного из пары датчиков регистрации колебаний в цифровой сигнал посредством второго A/D преобразователя 35, чтобы регулировать значение частоты, полученное преобразованием частоты, до постоянного значения.
Для разрешения вышеупомянутых проблем, в соответствии с седьмым объектом настоящего изобретения, устройство обработки сигналов для расходомера Кориолиса, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая составляет измерительную расходомерную трубку, поочередно возбуждаются посредством вибратора, приводимого в действие приводным устройством, чтобы возбудить колебания, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, и, по меньшей мере, одно - разность фаз и частота колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, регистрируется парой датчиков регистрации колебаний, чтобы тем самым получить, по меньшей мере, одно - массовый расход и плотность измеряемого флюида, включает в себя:
трансмиттер 120 для передачи частотно-кодированного сигнала, который является модулируемым;
первый блок 110 преобразования частоты для смещения частоты до сигнала с постоянной частотой, частоты θ входного сигнала, полученной преобразованием сигнала одного датчика скорости из пары датчиков регистрации колебаний в цифровой сигнал первым A/D преобразователем 31 на основании выходной частоты θXn от трансмиттера 120, чтобы переместить частоту входного сигнала в желаемую полосу частот;
второй блок преобразования частоты 140 для сдвига частоты до сигнала с постоянной частотой, входного сигнала частоты θ, полученной преобразованием сигнала другого датчика скорости из пары датчиков регистрации колебаний в цифровой сигнал посредством второго A/D преобразователя 35 на основании выходной частоты θXn от трансмиттера 120, чтобы переместить частоту входного сигнала в желаемую полосу частот; и
блок 160 измерения частоты для измерения частоты первого частотно-кодированного сигнала, который получается как заданный сигнал постоянной частоты с помощью смещения и выводится от первого блока 110 преобразования частоты, и вывода измеренной частоты первого частотно-кодированного сигнала на трансмиттер 120, чтобы управлять, на основании частоты после смещения первым блоком 110 преобразования частоты, выходными частотами от первого блока преобразования частоты и второго блока преобразования частоты так, чтобы частота входного сигнала, полученная преобразованием сигнала одного датчика скорости из пары датчиков регистрации колебаний в цифровой сигнал первым A/D преобразователем 31, была бы желаемой частотой.
Для разрешения вышеупомянутых проблем, в соответствии с восьмым объектом настоящего изобретения, в устройстве обработки сигналов в соответствии с любым одним из - пятого, шестого и седьмого объектов, блок 110 преобразования частоты включает в себя:
умножитель 111 для умножения опорного сигнала cosθ1 от трансмиттера 120 на входной сигнал SINθ1 от первого A/D преобразователя 31; и
фильтр 112 нижних частот для фильтрации выходного сигнала, полученного умножением умножителем 111, с помощью частотного фильтра, чтобы выделить только низкочастотный сигнал.
Для разрешения вышеупомянутых проблем, в соответствии с девятым объектом настоящего изобретения, в устройстве обработки сигналов в соответствии с любым одним из - пятого, шестого и седьмого объектов, блок 110 преобразования частоты включает в себя:
умножитель 111 для умножения опорного сигнала cosθ2 от трансмиттера 120 на входной сигнал SINθ1 от первого A/D преобразователя 31; и
фильтр 112 верхних частот для фильтрации выходного сигнала, полученного умножением умножителем 111, с помощью частотного фильтра, чтобы выделить только высокочастотный сигнал.
Для разрешения вышеупомянутых проблем, в соответствии с десятым объектом настоящего изобретения, в устройстве обработки сигналов в соответствии с седьмым, восьмым и девятым объектами:
блок 160 измерения частоты включает в себя умножитель 161, соединенный с первым блоком 110 преобразования частоты, фильтр 162 нижних частот, соединенный с умножителем 161, и трансмиттер 163 для измерения частоты, который соединяется с фильтром 162 нижних частот и принимает выходной сигнал от фильтра 162 нижних частот;
умножитель 161 сравнивает выходной сигнал sin(θ+θXn) от блока 110 преобразования частоты с фазой выходного сигнала cosδ от трансмиттера 163 для измерения частоты и выводит разностный сигнал и суммарный сигнал на фильтр 162 нижних частот;
фильтр 162 нижних частот фильтрует выходной сигнал от умножителя 161 с помощью частотного фильтра, чтобы выделить только низкочастотный сигнал; и
значение фазы V основного выходного сигнала создается на основании низкочастотного выходного сигнала от фильтра 162 нижних частот и удовлетворяет условию V=0 посредством трансмиттера 163 для измерения частоты.
Для разрешения вышеупомянутых проблем, в соответствии с одиннадцатым объектом настоящего изобретения, устройство обработки сигналов в соответствии с любым из - седьмого, восьмого, девятого и десятого объектов дополнительно включает в себя тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя 31 и выходного сигнала второго A/D преобразователя 35, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя 31, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя 35.
Для разрешения вышеупомянутых проблем, в соответствии с двенадцатым объектом настоящего изобретения, в устройстве обработки сигналов в соответствии с любым из - седьмого, восьмого, девятого, десятого и одиннадцатого объектов блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
Для разрешения вышеупомянутых проблем, в соответствии с тринадцатым объектом настоящего изобретения, расходомер Кориолиса, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая составляет измерительную расходомерную трубку, поочередно возбуждаются посредством вибратора, приводимого в действие приводным устройством, чтобы возбудить колебания, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, и, по меньшей мере, одно - разность фаз и частота колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, регистрируется парой датчиков скорости или датчиков ускорения, которые являются парой датчиков регистрации колебаний, чтобы тем самым получить, по меньшей мере, одно - массовый расход и плотность измеряемого флюида, включает в себя:
трансмиттер 120 для передачи частотно-кодированного сигнала, который является модулируемым;
первый блок 110 преобразования частоты для сдвига частоты к заданному постоянному частотно-кодированному сигналу, частоты θ входного сигнала, полученной преобразованием сигнала одного датчика скорости из пары датчиков регистрации колебаний в цифровой сигнал первым A/D преобразователем 31 на основании выходной частоты θxn от трансмиттера 120, чтобы переместить частоту входного сигнала в желаемую полосу частот;
второй блок 140 преобразования частоты для сдвига частоты к заданному постоянному частотно-кодированному сигналу, частоты θ входного сигнала, полученной преобразованием сигнала другого датчика скорости из пары датчиков регистрации колебаний в цифровой сигнал посредством второго A/D преобразователя 35 на основании выходной частоты θXn от трансмиттера 120, чтобы переместить частоту входного сигнала в желаемую полосу частот; и
блок 160 измерения частоты для измерения частоты первого частотно-кодированного сигнала, который получается как заданный сигнал постоянной частоты с помощью смещения и вывода от первого блока 110 преобразования частоты и вывода измеренной частоты первого частотно-кодированного сигнала на трансмиттер 120, чтобы управлять, на основании частоты после смещения первым блоком 110 преобразования частоты, выходными частотами от первого блока преобразования частоты и второго блока преобразования частоты так, чтобы частота входного сигнала, полученная преобразованием сигнала одного датчика скорости из пары датчиков регистрации колебаний в цифровой сигнал первым A/D преобразователем 31 была бы желаемой частотой.
Примеры расходомерной трубки расходомера Кориолиса включают в себя изогнутую трубку и прямую трубку. Эти трубки могут возбуждаться на различных колебательных модах, включающих в себя основную моду и побочную моду.
Как известно, полоса возбуждающих частот для расходомерной трубки составляет от нескольких десятков герц до нескольких килогерц. Например, когда расходомерная трубка, использующая U-образную трубку, колеблется на основной моде, частота составляет приблизительно 100 Гц. Когда расходомерная трубка, имеющая прямую форму, колеблется на основной моде, реализуется частота в диапазоне приблизительно от 500 Гц до 1000 Гц.
Однако очень трудно выполнить измерения фазы и частоты расходомера Кориолиса всегда посредством той же самой обработки по полосе частот от нескольких десятков герц до нескольких килогерц в единственном преобразователе расходомера. Поэтому необходимо специально проектировать некоторое количество различных расходомеров.
В соответствии со способом обработки сигналов по настоящему изобретению, основные проблемы, как описано выше, могут быть сняты посредством удачной обработки сигналов на основании алгоритма идентификации. Даже в случае изменения температуры измеряемого флюида, смешивания с воздушными пузырями или быстрого изменения состояния измеряемого флюида от газообразного до жидкого, измерения фазы и частоты могут быть всегда выполнены с неизменной точностью, и, следовательно, может быть обеспечена высокая эффективность.
В соответствии с устройством обработки сигналов по настоящему изобретению, даже когда температура измеряемого флюида изменяется, даже когда воздушные пузыри смешиваются с измеряемым флюидом или даже когда измеряемый флюид быстро изменяется от газообразного состояния до жидкого, измерение всегда может быть выполнено с неизменной точностью, и измерения фазы и частоты могут быть выполнены с малым объемом вычислений.
В соответствии с расходомером Кориолиса по настоящему изобретению, даже когда температура измеряемого флюида изменяется, даже когда воздушные пузыри смешиваются с измеряемым флюидом или даже когда измеряемый флюид быстро изменяется от газообразного до жидкого, измерение всегда может быть выполнено с неизменной точностью, и измерения фазы и частоты могут быть выполнены с малым объемом вычислений.
Фиг.1 изображает блок-схему, иллюстрирующую принцип устройства обработки сигналов в соответствии с настоящим изобретением.
Фиг.2 - блок-схема, показывающая конкретную структуру устройства обработки сигналов, показанного на Фиг.1.
Фиг.3 - блок-схема, показывающая конкретную структуру устройства обработки сигналов, показанного на Фиг.2, использующая способ управления с обратной связью.
Фиг.4 - диаграмма, показывающая выходной сигнал от LPF, показанного на Фиг.3.
Фиг.5 - диаграмма, показывающая выходной сигнал от A/D преобразователя, показанного на Фиг.3.
Фиг.6 - диаграмма, показывающая выходной сигнал от трансмиттера, показанного на Фиг.3.
Фиг.7 - диаграмма, показывающая выходной сигнал в умножителе блока преобразования частоты, показанного на Фиг.3.
Фиг.8 - диаграмма, показывающая выходной сигнал из блока преобразования частоты, показанного на Фиг.3.
Фиг.9 - временные диаграммы для конкретной структуры устройства обработки сигналов, показанного на Фиг.3.
Фиг.10 - блок-схема последовательности операций для конкретной структуры устройства обработки сигналов, показанного на Фиг.3.
Фиг.11 - структурная блок-схема, показывающая блок преобразования частоты устройства обработки сигналов, показанного на Фиг.3.
Фиг.12 - структурная блок-схема, показывающая блок измерения частоты устройства обработки сигналов, показанного на Фиг.3.
Фиг.13 - структурная схема, показывающая обычный расходомер Кориолиса, к которому применяется настоящее изобретение.
Фиг.14 - структурная блок-схема, показывающая преобразователь расходомера Кориолиса, показанного на Фиг.13.
Фиг.15 - блок-схема, показывающая способ измерения фазы, использующий Фурье преобразование для преобразователя, показанного на Фиг.14.
Фиг.16 - блок-схема, показывающая способ измерения фазы, использующий режекторные фильтры для преобразователя, показанного на Фиг.14.
Фиг.17 - блок-схема, показывающая способ измерения фазы, использующий полосовые фильтры для преобразователя, показанного на Фиг.14.
[Варианты осуществления Изобретения]
Настоящее изобретение было реализовано так, чтобы достигнуть того, чтобы измерение всегда могло быть выполнено с неизменной точностью и очень малым объемом вспомогательных вычислений, даже когда температура измеряемого флюида изменяется, даже когда воздушные пузыри смешиваются с измеряемым флюидом или даже когда измеряемый флюид быстро изменяется от газообразного состояния до жидкого состояния.
[Вариант реализации 1]
Ниже, в связи с Фиг.1-9, описывается Вариант реализации 1 настоящего изобретения.
На Фиг.1 показана принципиальная схема, иллюстрирующая способ обработки сигналов и устройство в соответствии с настоящим изобретением. На Фиг.2 показана подробная схема для принципиальной схемы, показанной на Фиг.1. На Фиг.3 показана блок-схема, иллюстрирующая конкретную структуру устройства обработки сигналов, показанного на Фиг.2, использующего способ управления с обратной связью. На Фиг.4 показан выходной сигнал от LPF, показанного на Фиг.3. На Фиг.5 показан выходной сигнал от A/D преобразователя, показанного на Фиг.3. На Фиг.6 показан выходной сигнал от трансмиттера, показанного на Фиг.3. На Фиг.7 показан выходной сигнал в умножителе блока преобразования частоты, показанного на Фиг.3. На Фиг.8 показан выходной сигнал из блока преобразования частоты, показанного на Фиг.3. На Фиг.9 показаны временные диаграммы для конкретной структуры устройства обработки сигналов, показанного на Фиг.3.
На Фиг.1, когда измерительные трубки 2 и 3 колеблются посредством вибратора (например, электромагнитный генератор) 6, скорости колебаний, образующиеся в измерительных трубках 2 и 3, регистрируется датчиком 70 скорости колебаний (например, датчиком скорости, или датчиком ускорения). Регистрируемые скорости колебаний рассчитываются и обрабатываются вычислительным устройством 80 для сигнала скорости колебаний. Датчик 70 скорости колебаний соответствует левому датчику 7 скорости и правому датчику 8 скорости на Фиг.13.
Вычислительное устройство 80 для сигнала скорости колебаний включает в себя блок 85 преобразования частоты, трансмиттер 90 и блок 95 измерения разности фаз.
Блок 85 преобразования частоты выполняет преобразование частоты при скоростях колебаний, которые создаются в измерительных трубках 2 и 3 и регистрируется датчиком 70 скорости колебаний, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6. Сигнал от трансмиттера 90 вводится на блок 85 преобразования частоты.
Затем сигналы, полученные преобразованием частоты блоком 85 преобразования частоты, вводятся на блок 95 измерения разности фаз, предоставленных в последующем каскаде блока 85 преобразования частоты. Блок 95 измерения разности фаз выполняет A/D преобразование с соответствующими сигналами скорости от датчика 70 скорости колебаний, чтобы тем самым выполнить обработку цифровым преобразованием, и затем получает разность фаз между ними.
В способе и устройстве обработки сигналов, показанном на Фиг.1, входные сигналы подвергаются преобразованию частоты, чтобы регулировать частоты после преобразования частот до постоянных значений, и измерение фазы выполняется после преобразования частоты. Поэтому реализуется устройство обработки фильтрацией, пригодное для выполнения высокоскоростного, непрерывного, и высокоточного измерения фазы, даже когда частоты входных сигналов изменяются.
То есть в способе и устройстве 80 обработки сигналов, как показано на Фиг.1, входные частоты FIN входных сигналов от датчика 70 скорости колебаний и частота FX выходного сигнала трансмиттера 90, перемножаются блоком 85 преобразования частоты, чтобы добавить (или вычесть) разности фаз обоих сигналов, и трансмиттер 90 управляется так, чтобы частоты после преобразования частоты были постоянными, чтобы привести частоты, вводимые на блок 95, к постоянному значению, чтобы тем самым выполнить измерение фазы на основании сигналов после преобразования частоты.
Когда используется такая структура, то может быть реализован непрерывный, по существу свободный от ошибок и высокоскоростной расчет, без применения большого количества фильтров, соответствующих вводимым частотам, и без выполнения какой-либо сложной обработки, например смены способа расчета.
[Выражение 1]
Fc=Fx+FIN (или Fc=Fx-FNI) (1)
В расчетном Выражении (1), Fc указывает частоту после преобразования частоты, FIN указывает входную частоту (частота колебаний измерительной расходомерной трубки) и Fx указывает частоту передачи трансмиттера.
Ниже описывается способ получения плотности измеряемого флюида.
Когда измеряется плотность, необходимо измерить частоты колебаний измерительных трубок 2 и 3. Поэтому желательно получить значения частоты до преобразования частот.
В способе обработки сигналов и устройстве обработки сигналов, как показано на Фиг.1, скорости колебаний, которые создаются в измерительных трубках 2 и 3 и выводятся от датчика 7 скорости колебаний в случае, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6, преобразуются в частоты блоком 85 преобразования частоты, и частоты, полученные преобразованием частоты блоком 85 преобразования частоты, приводятся к постоянным частотам.
В расчетном Выражении (1) частота Fc после преобразования частоты всегда приводится к постоянной частоте и таким образом - к известному значению.
Кроме того, Fx указывает частоту передачи трансмиттера 90. Когда значение частоты Fx передачи трансмиттера 90 регулируется для приведения частоты Fc после частотного преобразования в постоянную частоту, частота Fx передачи трансмиттера 90 становится, конечно же, известной. Когда значение частоты Fx передачи трансмиттера 90 не известно, регулировка не может быть выполнена.
Поэтому подстановка в Выражение (1) частоты Fc после преобразования частоты и частоты Fx передачи трансмиттера 90, которые известны, может дать входную частоту FIN (частота колебаний измерительной расходомерной трубки).
Известно следующее соотношение между периодом T колебаний расходомерной трубки и плотностью ρ флюида в случае, если определенные константы устройства измерения плотности (включающие в себя определенные значения используемого устройства) обозначаются как "A" и "B". Иначе говоря, когда определенные константы "A" и "B" устройства могут быть определены, период T колебаний расходомерной трубки может быть измерен, чтобы получить плотность ρ флюида.
[Выражение 2]
ρ=AT2+B (2)
Эта обработка выполняется в реальном времени и, следовательно, может быть получена плотность измеряемого флюида в измерительных трубках 2 и 3.
Следует отметить, что подробное выражение для расчета плотности описано в японской Патентной заявке No.2001-34989 (JP 2002-243613 A).
На Фиг.2 показана конкретная структура устройства обработки сигналов, показанного на Фиг.1.
На Фиг.2 левый тензометрический датчик (LPO) 7 (соответствующий левому датчику 7 скорости) соединяется с фильтром 30 нижних частот. То есть во время колебаний с использованием вибратора 6, когда регистрируемый сигнал скорости колебаний (сигнал скорости выпускной стороны), который создается на левой стороне измерительных трубок 2 и 3, регистрируется левым тензометрическим датчиком 7, регистрируемый сигнал скорости колебаний (сигнал скорости выпускной стороны) вводится на фильтр 30 нижних частот.
Фильтр 30 нижних частот представляет собой схему для выделения, с помощью частотной фильтрации, только низкочастотного левого сигнала скорости (сигнал скорости выпускной стороны) от левого сигнала скорости (сигнал скорости выпускной стороны), выводимого от левого датчика 7 скорости, регистрирующего скорость колебаний, создаваемых на левой стороне измерительных трубок 2 и 3 в случае, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6.
Фильтр 30 нижних частот соединяется с A/D преобразователем 31. A/D преобразователь 31 преобразует левый сигнал скорости (сигнал скорости выпускной стороны), который является аналоговым сигналом, выводимым от фильтра 30 нижних частот, в цифровой сигнал. Левый сигнал скорости (сигнал скорости выпускной стороны), полученный как цифровой сигнал A/D преобразователем 31, вводится на устройство 100 обработки сигналов.
Кроме того, устройство 100 обработки сигналов соединяется с A/D преобразователем 31. Устройство 100 обработки сигналов преобразует по частоте входной сигнал (сигнал скорости выпускной стороны) в желаемую частоту, обрабатываемую модулем измерения фазы, расположенным в последующем каскаде, и выполняет измерение фазы после преобразования частоты так, чтобы сдвинуть полосу входных частот и реализовать устойчивое измерение фазы.
С другой стороны, правый тензометрический датчик (RPO) 8 (соответствующий правому датчику 8 скорости) соединяется с фильтром 34 нижних частот. То есть во время колебаний с использованием вибратора 6, когда регистрируемый сигнал скорости колебаний (сигнал скорости впускной стороны), который создается на правой стороне измерительных трубок 2 и 3, регистрируется правым тензометрическим датчиком 8, регистрируемый сигнал скорости колебаний (сигнал скорости впускной стороны) вводится на фильтр 34 нижних частот.
Фильтр 34 нижних частот представляет собой схему для выделения, с помощью частотной фильтрации, только низкочастотного правого сигнала скорости (сигнал скорости впускной стороны) из правого сигнала скорости (сигнал скорости впускной стороны), выводимого от правого датчика 8 скорости, регистрирующего скорость колебаний, создаваемых на правой стороне измерительных трубок 2 и 3 в случае, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6.
Фильтр 34 нижних частот соединяется с A/D преобразователем 35. A/D преобразователь 35 преобразует правый сигнал скорости (сигнал скорости впускной стороны), который является аналоговым сигналом, выводимым от фильтра 34 нижних частот, в цифровой сигнал.
Кроме того, устройство 100 обработки сигналов соединяется с A/D преобразователем 35. Устройство 100 обработки сигналов преобразует по частоте входной сигнал (сигнал скорости впускной стороны) в желаемую частоту, обрабатываемую модулем измерения фазы, расположенным в последующем каскаде, и выполняет измерение фазы после преобразования частоты так, чтобы сдвинуть полосу входных частот и реализовать устойчивое измерение фазы.
A/D преобразователь 31 соединяется с блоком 110 преобразования частоты. Блок 110 преобразования частоты преобразует по частоте цифровой сигнал левого сигнала скорости (сигнал скорости выпускной стороны), выводимого от A/D преобразователя 31, и затем он вводится на желаемой частоте для обработки модулем измерения фазы, расположенным в последующем каскаде.
Кроме того, A/D преобразователь 35 соединяется с блоком 140 преобразования частоты. Блок 140 преобразования частоты преобразует по частоте цифровой сигнал правого сигнала скорости (сигнал скорости впускной стороны), выводимый от A/D преобразователя 35, и затем вводит его на желаемой частоте тем же самым образом, как и описано выше.
Кроме того, сигнал от трансмиттера 120 вводится на блок 110 преобразования частоты. Когда сигнал, выведенный от трансмиттера 120, вводится на блок 110 преобразования частоты, блок 110 преобразования частоты преобразует по частоте входной сигнал (сигнал скорости выпускной стороны), вводимый от левого тензометрического датчика 7 на основании сигнала, выводимого от трансмиттера 120.
Сигнал, полученный преобразованием частоты блоком 110 преобразования частоты, преобразуется в желаемый сигнал с постоянной частотой на основании выходного сигнала от трансмиттера 120.
Кроме того, сигнал от трансмиттера 120 является также входным сигналом для блока 140 преобразования частоты. Когда сигнал, выводимый от трансмиттера 120, вводится на блок 140 преобразования частоты, блок 140 преобразования частоты преобразует по частоте входной сигнал (сигнал скорости впускной стороны), вводимый от правого тензометрического датчика 8, на основании сигнала, выводимого от трансмиттера 120.
Сигнал, полученный преобразованием частоты блоком 140 преобразования частоты, преобразуется в желаемый сигнал с постоянной частотой на основании выходного сигнала от трансмиттера 120.
Когда трансмиттер 120 управляется так, как описано выше, как в случае блока 110 преобразования частоты, также и в блоке 140 преобразования частоты, частота, полученная после выполнения преобразования частоты правого сигнала скорости (сигнал скорости впускной стороны), вводимая от A/D преобразователя 35, регулируется до желаемой частоты, обрабатываемой модулем 130 измерения фазы, расположенным в последующем каскаде, на основании частоты выходного сигнала, выводимого от трансмиттера 120.
Входная частота левого сигнала скорости (сигнал скорости выпускной стороны), который выводится от A/D преобразователя 31 и вводится на блок 110 преобразования частоты, и входная частота правого сигнала скорости (сигнал скорости впускной стороны), который выводится от A/D преобразователя 35 и вводится на блок 140 преобразования частоты, одновременно подвергаются частотному преобразованию и вводятся на модуль 130 измерения разности фаз, чтобы выполнить измерение разности фаз.
Когда используется такая конструкция, в соответствии с этим вариантом реализации, входные частоты (левый сигнал скорости и правый сигнал скорости) одновременно преобразуются в желаемые полосы частот. Поэтому даже когда входные частоты (левый сигнал скорости и правый сигнал скорости) изменяются, частота, обрабатываемая для измерения фазы, всегда устанавливается как постоянное значение, чтобы значительно уменьшить число таблиц фильтрации. Кроме того, обработка для измерения фазы может быть выполнена более эффективно.
В соответствии с результатом настоящего изобретения, может быть реализован непрерывный, по существу свободный от ошибок, и высокоскоростной расчет, без предоставления большого количества фильтров, соответствующих входным частотам, и без выполнения какой-либо сложной обработки, например без изменения способа расчета. Не говоря уже о том, что обработка данных блоком измерения фазы может быть реализована даже с использованием дискретного Фурье преобразования (DFT) или быстрого Фурье преобразования (FFT).
Тактовый сигнал вводится от тактового генератора 150 на A/D преобразователь 31 и A/D преобразователь 35. Тактовый генератор 150 синхронизирует цифровой сигнал левого сигнала скорости, выводимого от A/D преобразователя 31, и цифровой сигнал правого сигнала скорости, выводимого от A/D преобразователя 35, чтобы реализовать одновременную дискретизацию.
Блок 110 преобразования частоты, трансмиттер 120, модуль 130 измерения разности фаз, блок 140 преобразования частоты и тактовый генератор 150 включены в устройство 100 обработки сигналов.
Соответствующие входные сигналы (левый сигнал скорости и правый сигнал скорости), которые являются цифровыми сигналами, полученными преобразованием A/D преобразователями 31 и 35, как описано выше, подвергаются преобразованию частоты блоками 110 и 140 преобразования частоты на основании выходного сигнала от трансмиттера 120.
Далее рассматривается конкретный вычислительный способ для расчета измерения разности фаз в устройстве 100 обработки сигналов, показанном на Фиг.2.
Когда измерительные трубки 2 и 3 колеблются посредством вибратора 6 расходомера 1 Кориолиса, выходные сигналы (левый сигнал скорости и правый сигнал скорости) от датчика 70 регистрации колебаний (левый тензометрический датчик 7 и правый тензометрический датчик 8), предоставленного в измерительных трубках 2 и 3, получаются как входные сигналы LPO (левый тензометрический датчик 7) и RPO (правый тензометрический датчик 8), как показано на Фиг.2.
В этом случае, входные сигналы LPO и RPO определяются следующим образом (δφ: разность фаз между LPO и RPO).
[Выражение 3]
Правый тензометрический датчик:sin(θ) (3)
[Выражение 4]
Левый тензометрический датчик:sin(θ+δφ) (4)
Выходные сигналы (левый сигнал LPO скорости и правый сигнал RPO скорости) от двух датчиков скорости колебаний (левого тензометрического датчика 7 и правого тензометрического датчика 8) преобразуются из аналоговых сигналов в цифровые сигналы A/D преобразователями 31 и 35 с помощью фильтров 30 и 34 нижних частот, предоставленных в преобразователе расходомера 1 Кориолиса соответственно и затем передаются на устройство 100 обработки сигналов.
Как описано выше, устройство 100 обработки сигналов поделено на четыре блока, включающих в себя блок 110 преобразования частоты, трансмиттер 120, блок 130 измерения разности фаз и блок 140 преобразования частоты. Разность фаз между выходным сигналом LPO от левого тензометрического датчика 7 и выходным сигналом RPO от правого тензометрического датчика 8 рассчитывается и затем преобразуется в сигнал расхода на основании частот, выводимых от датчиков скорости колебаний, и данных о температуре, регистрируемых температурным датчиком 9.
Следует отметить то, что измерение температуры не показано на чертеже.
Выходной сигнал с преобразованной частотой, выводимый из блока 110 преобразования частоты, получается добавлением (или вычитанием) выходной частоты θXn, выводимой от трансмиттера 120, к (или из) частоте θ входного сигнала, выводимого в случае, когда левый сигнал скорости (сигнал скорости выпускной стороны), который регистрируется левым тензометрическим датчиком (левый датчик скорости) 7, и выделяется как низкочастотный сигнал фильтром 30 нижних частот, преобразуется в цифровой сигнал A/D преобразователем 31.
Как описано выше, относительно частоты входного сигнала, который выводится из блока 110 преобразования частоты и вводится на блок 130 измерения фазы, частота входного сигнала θ, который является низкочастотным левым сигналом скорости (сигнал скорости выпускной стороны) цифрового сигнала, выводимого от A/D преобразователя 31, сдвигается к другой полосе частот исходя из выходной частоты θXn, выводимой от трансмиттера 120 в блоке 110 преобразования частоты.
Поэтому сигнал, который сдвинут по частоте и выводится блоком 110 преобразования частоты, и сигнал, который сдвинут по частоте и выводится блоком 140 преобразования частоты, одинаково обработанные, подвергаются фазовому расчету блоком 130 измерения фазы.
Значение (θ+θXn) измерения частоты, выводимое из блока 110 преобразования частоты, регулируется так, чтобы окончательно получить заданное значение θC частоты измерения фазы, которое устанавливается произвольно.
[Выражение 5]
θC=θ+θXn (5)
Когда трансмиттер 120 управляется так, чтобы значение (θ+θXn) измерения частоты, вводимое в блок 130 измерения фазы, всегда становилось постоянной частотой θC, как описано выше, может быть достигнута высокоскоростная обработка данных при последующем измерении фазы.
Способ управления частоты в соответствии с настоящим изобретением включает в себя способ для такой регулировки частоты трансмиттера 120, чтобы частоты выходных сигналов блоков (110 и 140) преобразования частоты, все становились бы равными θc с учетом Выражения (5), то есть способ управления с обратной связью.
Далее, рассматриваются способ обработки сигналов и устройство обработки сигналов в соответствии с вариантом реализации настоящего изобретения.
На Фиг.3 показана конкретная структура устройства обработки сигналов, показанного на Фиг.2, использующего способ управления с обратной связью.
Устройство 100 обработки сигналов, показанное на Фиг.3, выполняет преобразование частоты входных сигналов (сигналы скорости впускной и выпускной сторон) в желаемые частоты и выполняет измерение фазы после преобразования частоты и, следовательно, может быть достигнуто устойчивое измерение фазы без учета полос входных частот.
На Фиг.3 A/D преобразователь 31 соединяется с блоком 110 преобразования частоты. Блок 110 преобразования частоты выполняет преобразование частоты цифрового сигнала левого сигнала скорости (сигнал скорости выпускной стороны), выводимого и вводимого от A/D преобразователя 31.
Кроме того, A/D преобразователь 35 соединяется с блоком 140 преобразования частоты. Блок 140 преобразования частоты выполняет преобразование частоты цифрового сигнала правого сигнала скорости (сигнал скорости впускной стороны), выводимого от A/D преобразователя 35 и затем вводимого в него.
Кроме того, блок 110 преобразования частоты сконфигурирован так, чтобы сигнал от трансмиттера 120 вводился бы в него. Когда сигнал, выводимый от трансмиттера 120, вводится на блок 110 преобразования частоты, блок 110 преобразования частоты выполняет преобразование частоты входного сигнала (сигнал скорости выпускной стороны), вводимого от левого тензометрического датчика 7 на основании сигнала, выводимого от трансмиттера 120.
Сигнал, полученный преобразованием частоты блоком 110 преобразования частоты, преобразуется в сигнал с постоянной частотой на основании выходного сигнала от трансмиттера 120.
Кроме того, блок 140 преобразования частоты также сконфигурирован так, чтобы сигнал от трансмиттера 120 вводился в него. Когда сигнал, выводимый от трансмиттера 120, вводится на блок 140 преобразования частоты, блок 140 преобразования частоты выполняет преобразование частоты входного сигнала (сигнал скорости впускной стороны), вводимого от правого тензометрического датчика 8 на основании сигнала, выводимого от трансмиттера 120.
Сигнал, полученный преобразованием частоты блоком 140 преобразования частоты, преобразуется в сигнал с постоянной частотой на основании выходного сигнала от трансмиттера 120.
Когда управление выполняется модулируемым трансмиттером 120, как описано выше, как в случае блока 110 преобразования частоты, так и блок 140 преобразования частоты также выполняет преобразование частоты, на основании частоты выходного сигнала, выводимого от трансмиттера 120.
Выходная часть блока 110 преобразования частоты соединяется с блоком 160 измерения частоты и блоком 130 измерения разности фаз. Блок 160 измерения частоты измеряет выходную частоту, полученную преобразованием частоты блоком 110 преобразования частоты.
Блок 140 преобразования частоты соединяется с модулем 130 измерения разности фаз.
Блок 160 измерения частоты измеряет частоту (θCn=θ+θXn) выходного сигнала, полученную добавлением (или вычитанием) выходной частоты θXn, выводимой от трансмиттера 120, к (или из) частоте θ входного сигнала, полученной преобразованием в цифровой сигнал A/D преобразователем 31 низкочастотного левого сигнала скорости (сигнал скорости выпускной стороны), который регистрируется левым тензометрическим датчиком (левый датчик скорости) 7 и выделяется фильтром 30 нижних частот в блоке 110 преобразования частоты.
Измеренное значение частоты, измеряемое блоком 160 измерения частоты, выводится на трансмиттер 120. Когда значение измерения частоты выходного сигнала (θCn=θ+θXn), выводимое из блока 160 измерения частоты, вводится на трансмиттер 120, заданный частотно-кодированный сигнал (θXn) передается на основании значения измерения частоты (θCn=θ+θXn) выходного сигнала и выводится от трансмиттера 120 на блоки 110 и 140 преобразования частоты.
В петле обратной связи, которая начинается в блоке 110 преобразования частоты, проходит через блок 160 измерения частоты и трансмиттер 120 и возвращается к блоку 110 преобразования частоты, выходная частота, выводимая от трансмиттера 120, добавляется к, или вычитается из, входной частоте левого сигнала скорости (сигнал скорости выпускной стороны), вводимого от A/D преобразователя 31 блоком 110 преобразования частоты, чтобы выполнить преобразование частоты в блоке 110 преобразования частоты.
Преобразованная частота, выводимая из блока 140 преобразования частоты, получается добавлением (или вычитанием) выходной частоты θXn, выводимой от трансмиттера 120, к (или из) частоте (θ+δφ) входного сигнала, полученной преобразованием правого сигнала скорости (сигнал скорости впускной стороны), который регистрируется правым тензометрическим датчиком (правый датчик скорости) 8 и выделяется как низкочастотный сигнал фильтром 34 нижних частот, в цифровой сигнал A/D преобразователем 35.
Как описано выше, относительно частоты входного сигнала, который выводится из блока 140 преобразования частоты и вводится на блок 130 измерения фазы, частота (θ+δφ) входного сигнала, который является низкочастотным правым сигналом скорости (сигнал скорости впускной стороны) цифрового сигнала, выводимого от A/D преобразователя 35, сдвигается по частоте к другой полосе частот на основании выходной частоты θXn, выводимой от трансмиттера 120 в блоке 140 преобразования частоты.
Когда трансмиттер 120 управляется так, как описано выше, как в случае блока 110 преобразования частоты, так и в блоке 140 преобразования частоты преобразование частоты также выполняется на основании выходной частоты θXn, выводимой от трансмиттера 120.
Модулируемый трансмиттер 120 управляется по частоте с использованием очень простого расчетного выражения, как описано выше.
Кроме того, блок 110 преобразования частоты соединяется с модулем 130 измерения разности фаз. Кроме того, блок 140 преобразования частоты соединяется с модулем 130 измерения разности фаз.
В модуле 130 измерения разности фаз, каждая частота θ левого сигнала скорости (сигнал скорости выпускной стороны), который выводится от A/D преобразователя 31 и вводится на блок 110 преобразования частоты, и частота (θ+δφ) правого сигнала скорости (сигнал скорости впускной стороны), который выводится от A/D преобразователя 35 и вводится на блок 140 преобразования частоты, преобразуется в ту же самую постоянную желаемую частоту для выполнения измерения разности фаз.
Когда используется такая конструкция, в соответствии с этим вариантом реализации, входные частоты (левого сигнала скорости и правого сигнала скорости) преобразуются в желаемые полосы частот. Поэтому полосы частот для входных частот (левого сигнала скорости и правого сигнала скорости) сдвинуты, и число таблиц фильтрации значительно уменьшается. Кроме того, обработка данных при измерении фазы может быть выполнена более эффективно.
В соответствии с результатом настоящего изобретения, может быть реализован непрерывный, по существу свободный от ошибок, и высокоскоростной расчет, без предоставления большого количества фильтров, соответствующих входным частотам, и без выполнения какой-либо сложной обработки данных, например без изменения способа расчета. Следует отметить, что обработка данных блока измерения фазы может быть реализована даже с использованием дискретного Фурье преобразования (DFT) или быстрого Фурье преобразования (FFT).
Тактовый сигнал вводится от тактового генератора 150 на A/D преобразователь 31 и A/D преобразователь 35. Тактовый генератор 150 синхронизируют выходы A/D преобразователя 31 и A/D преобразователя 35 и таким образом выполняет важную функцию исключения ошибки дискретизации между цифровым сигналом левого сигнала скорости, выводимого от A/D преобразователя 31, и цифровым сигналом правого сигнала скорости, выводимого от A/D преобразователя 35.
Соответствующие входные сигналы (левый сигнал скорости и правый сигнал скорости), которые являются цифровыми сигналами, полученными преобразованием A/D преобразователями 31 и 35, как описано выше, подвергаются преобразованию частоты блоками 110 и 140 преобразования частоты на основании выходного сигнала от трансмиттера 120.
Далее, рассматривается конкретный расчет измерения разности фаз в устройстве 100 обработки сигналов, показанном на Фиг.3.
Ниже рассматривается измерение фазы на основании сигнала суммы компонентов с модуляционной композитной частотой.
Выходная частота блока 110 преобразования частоты измеряется блоком 160 измерения частоты. Передаваемая частота трансмиттера 120 управляется на основании измеренного значения.
В устройстве 100 обработки сигналов выходная частота блока 110 преобразования частоты измеряется блоком 160 измерения частоты.
В начальном состоянии выходной сигнал θXn трансмиттера 120 не выводится от трансмиттера 120, и, следовательно, начальный выходной сигнал θX0 от трансмиттера 120 выражается следующим образом.
[Выражение 6]
θX0=0 (6)
Поэтому относительно сигнала LPO расхода, который является выходным сигналом (левый сигнал скорости), выводимым от левого тензометрического датчика 7, предоставленного для измерительных трубок 2 и 3 в случае, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6 расходомера 1 Кориолиса, сумма частотных компонент с модулированной частотой может быть выражена как "(θ+θXn)". В случае θXn=θX0, частота выходного сигнала преобразователя 110 частоты выражается следующим образом на основании Выражения (6).
[Выражение 7]
θco=θ+θX0=θ (7)
Таким образом, начальная частота измерения активируется на основании частоты θ сигнала LPO.
Выходной сигнал θX1 от трансмиттера 120 на следующем первом этапе сравнивается с начальной частотой измерения так, что (частота θC измерения фазы)=(установленное значение заданной частоты)=const, Как выражено следующим Выражением (8), θX1 определяется так, что разность становится выходным сигналом трансмиттера 120.
Частота θX1 трансмиттера получается следующим образом.
[Выражение 8]
θХ1=θС-θ (8)
Когда частота θX1 трансмиттера на первом этапе получена, θC=const.
Частота выходного сигнала блока 110 преобразования частоты, который должен быть установлен для выходного сигнала θX2 от трансмиттера 120 на следующем этапе, выражается следующим образом.
[Выражение 9]
θ+θX1=θC1 (9)
Поэтому выходной сигнал θX2 от трансмиттера 120 на следующем этапе выражается на основании Выражения (8) следующим образом.
[Выражение 10]
θX2=θX1+θC-(θ+θX1) (10)
Когда описанная выше операция повторяется, получается следующее.
[Выражение 11]
θX4=θX3+θC-(θ+θX3)
:
:
θXn=θXn-1+θC-(θ+θXn-1)
Когда выходная частота θXn от трансмиттера 120 управляется на основании тактирования в реальном времени с помощью тактового генератора 150, как описано выше, то θXn≈θXn-1.
Поэтому частота (θ+θXn) выходного сигнала блока 110 преобразования частоты окончательно выражается следующим образом.
[Выражение 12]
θC=θ+θXn (12)
Таким образом, может быть достигнута высокоскоростная обработка данных при последующем измерении фазы, использующая Выражение (12) при последовательной обработке.
В фильтре 30 нижних частот, показанном на Фиг.3, когда гармонический шум удален, чтобы исключить влияние наложения (алиасинга) при A/D преобразовании, выводится синусоидальный сигнал (sinθ), как показано на Фиг.4.
Синусоидальный сигнал (sinθ), выводимый от фильтра 30 нижних частот, как показано на Фиг.4, дискретизируется для преобразования в цифровой сигнал, при произвольном постоянном интервале, A/D преобразователем 31, чтобы получить дискретизированный сигнал (sinθ), как показано на Фиг.5, и затем выводится из A/D преобразователя 31.
Сигнал (sinθ), как показано на Фиг.5, который выводится из фильтра 30 нижних частот и дискретизируется для преобразования в цифровой сигнал A/D преобразователем 31, вводится на блок 110 преобразования частоты устройства 100 обработки сигналов, показанного на Фиг.3. Кроме того, выходной сигнал трансмиттера, выводимый из трансмиттера 120, вводится на блок 110 преобразования частоты.
Когда значение измерения частоты (θCn=θ+θXn) выходного сигнала, выводимое из блока 160 измерения частоты, вводится на трансмиттер 120, передаваемый частотно-кодированный сигнал (θXn) трансмиттера 120 передается на желаемой частоте на основании измеренного значения частоты (θCn=θ+θXn) выходного сигнала, и косинусный сигнал (cosθXn), как показано на Фиг.6, выводится с той же самой частотой вывода передачи, что и интервал дискретизации входного сигнала в A/D преобразователе 31.
Когда выходной сигнал (cosθXn) от трансмиттера 120 вводится на блок 110 преобразования частоты, в блоке 110 преобразования частоты сигнал (sinθ), как показано на Фиг.5, который дискретизируется для преобразования в цифровой сигнал A/D преобразователем 31, умножается на выходной сигнал (cosθXn), выводимый от трансмиттера 120, как показано на Фиг.6, (sinθ×cosθXn), умножителем, предоставленным в блоке 110 преобразования частоты, чтобы тем самым получить сигнал (sinθ×cosθXn), как показано на Фиг.7.
Сигнал (sinθ×cosθXn), как показано на Фиг.7, который получается умножением (sinθ×cosθXn) умножителем, предоставленным в блоке 110 преобразования частоты, проходит через фильтр верхних частот (HPF), предоставленный в блоке 110 преобразования частоты, чтобы удалить низкочастотную компоненту, чтобы тем самым получить сигнал (sinθC), как показано на Фиг.8. Сигнал (sinθC), как показано на Фиг.8, выводится из блока 110 преобразования частоты и вводится на блок 160 измерения частоты и модуль 130 измерения разности фаз.
Разность фаз между выходными сигналами (левым сигналом скорости и правым сигналом скорости) от датчика 70 скорости колебаний (левого тензометрического датчика 7 и правого тензометрического датчика 8), предоставленных в измерительных трубках 2 и 3 в случае, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6 расходомера 1 Кориолиса, рассчитывается четырьмя блоками, включающими в себя блоки 110 и 140 преобразования частоты, трансмиттер 120, модуль 130 измерения разности фаз и блок 160 измерения частоты, включенными в устройство 100 обработки сигналов, показанное на Фиг.3. Затем, рассчитанная разность фаз преобразуется в сигнал расхода на основании частотно-кодированного сигнала, выводимого из блока 160 измерения частоты, и температурных данных, регистрируемых температурным датчиком 9.
Ниже, в связи с показанными на Фиг.9 временными диаграммами, рассматривается работа устройства 100 обработки сигналов, показанного на Фиг.3.
Вначале, в фильтре 30 нижних частот, показанном на Фиг.3, когда гармонический шум удаляется, чтобы исключить влияние наложения (алиасинга) при A/D преобразовании, выводится синусоидальный сигнал (sinθ), как показано на Фиг.5.
Когда выводится синусоидальный сигнал (sinθ), показанный на Фиг.5, синусоидальный сигнал (sinθ), показанный на Фиг.5, вводится на A/D преобразователь 31. Затем сигнал дискретизируется для преобразования в цифровой сигнал при произвольном постоянном интервале A/D преобразователем 31, чтобы получить дискретизированный сигнал (Y1=sinθ), как показано на Фиг.9(A), и выводится из A/D преобразователя 31.
Дискретизированный сигнал (sinθ), показанный на Фиг.9(A), который выводится из A/D преобразователя 31, вводится на блок 110 преобразования частоты устройства 100 обработки сигналов, показанного на Фиг.3.
С другой стороны, частота (θCn=θ+θXn) сигнала, измеренная на основании выведенного сигнала из блока 110 преобразования частоты, выводится из блока 160 измерения частоты устройства 100 обработки сигналов. В трансмиттере 120, на который вводится значение измеренной частоты (θCn=θ+θXn) выходного сигнала, выведенное из блока 160 измерения частоты, желаемый частотно-кодированный сигнал (θXn) передачи передается на основании измеренного значения частоты (θCn=θ+θXn) выходного сигнала, и косинусный сигнал (Y2=cosθXn), как показано на Фиг.9(B), выводится с той же самой выходной частотой передачи, что и интервал дискретизации входного сигнала в A/D преобразователе 31.
Когда косинусный сигнал (Y2=cosθXn), показанный на Фиг.9(B), вводится на блок 110 преобразования частоты из трансмиттера 120, косинусный сигнал умножается на дискретизированный сигнал (Y1=sinθ), показанный на Фиг.9(A), который выводится из A/D преобразователя 31, (sinθ×cosθXn), умножителем, предоставленным в блоке 110 преобразования частоты, чтобы получить сигнал (Y3=sinθ×cosθXn), как показано на Фиг.9(C).
Сигнал (Y3=sinθ×cosθXn), как показано на Фиг.9(C), который получается умножением, (sinθ×cosθXn), умножителем, предоставленным в блоке 110 преобразования частоты, проходит через фильтр верхних частот (HPF), предоставленный в блоке 110 преобразования частоты, чтобы удалить низкочастотную компоненту, чтобы тем самым получить сигнал (Y4=1/2·sinθC), как показано на Фиг.9(D). Сигнал (Y4=1/2·sinθC), как показано на Фиг.9(D) выводится из блока 110 преобразования частоты и вводится на блок 160 измерения частоты и модуль 130 измерения разности фаз.
Кроме того, в фильтре 34 нижних частот, показанном на Фиг.3, когда гармонический шум удаляется, чтобы исключить влияние наложения (алиасинга) при A/D преобразовании, выводится синусоидальный сигнал (sin(θ+δφ)).
Когда синусоидальный сигнал (sin(θ+δφ)) выводится, синусоидальный сигнал (sin(θ+δφ)) вводится на A/D преобразователь 35. Затем сигнал дискретизируется для преобразования в цифровой сигнал при произвольном постоянном интервале A/D преобразователем 35.
Сигнал, выводимый из A/D преобразователя 35, умножается на дискретизированный сигнал, выводимый из A/D преобразователя 35, умножителем, предоставленным в блоке 140 преобразования частоты, чтобы получить сигнал.
Сигнал, полученный умножением умножителем, предоставленным в блоке 140 преобразования частоты, проходит через фильтр верхних частот (HPF), предоставленный в блоке 110 преобразования частоты, чтобы удалить низкочастотную компоненту, чтобы тем самым получить сигнал (Y5=1/2·sin(θC+δφ)), как показано на Фиг.9(E). Сигнал (Y5=1/2·sin(θ+δφ)), показанный на Фиг.9(E) выводится из блока 110 преобразования частоты и вводится на модуль 130 измерения разности фаз.
В модуле 130 измерения разности фаз, сигнал (Y6=δφ), показанный на Фиг.9(F), выводится как разность фаз δφ на основании сигнала (Y4=1/2·sinθC), показанного на Фиг.9(D), который выводится из блока 110 преобразования частоты и вводится на модуль 130 измерения разности фаз, и сигнала (Y5=1/2·sin(θC+δφ)), показанного на Фиг.9(E), который выводится из блока 140 преобразования частоты и вводится на модуль 130 измерения разности фаз.
Когда вычислительный интервал синхронизируется со временем дискретизации, как описано выше, может быть улучшена эффективность выполнения измерения фазы в реальном времени.
Кроме того, каждый набор сигналов скорости колебаний (sinθ и sin(θ+δφ)) подвергаются той же самой обработке для вычисления фазы и, следовательно, вычислительные ошибки почти отсутствуют. Поэтому может достичь точного вычисления фазы.
[Вариант реализации 2]
Далее, в связи с показанной на Фиг.10 блок-схемой последовательности операций, рассматривается способ обработки сигналов.
На Фиг.10 представлена блок-схема последовательности операций, иллюстрирующая частотную модуляцию и измерение фазы в случае, когда используется петля обратной связи.
На Фиг.10, на этапе 200 инициализируются параметры устройства 100 обработки сигналов, которое является вычислительным устройством. Когда параметры устройства 100 обработки сигналов инициализированы, на этапе 200, устанавливается заданная частота для частотной модуляции, то есть заданная частота после частотной модуляции, и, кроме того, устанавливается частота начального опорного синусоидального сигнала, то есть первоначально устанавливается частота опорного сигнала.
Когда параметры устройства 100 обработки сигналов, которое является вычислительным устройством, инициализированы, устанавливается заданная частота после частотной модуляции, и частота опорного сигнала первоначально устанавливается на этапе 200, на этапе 210, сигнал фазы и скорости, выходящий от левого тензометрического датчика (LPO) 7 (левый датчик 7 скорости), дискретизируется для преобразования в цифровой сигнал при произвольном интервале дискретизации A/D преобразователем 31, и сигнал фазы и скорости, выходящий от правого тензометрического датчика (RPO) 8 (правый датчик 8 скорости) дискретизируется для преобразования в цифровой сигнал при произвольном интервале дискретизации A/D преобразователем 35.
Сигнал фазы и скорости, дискретизированный для преобразования в цифровой сигнал при произвольном интервале дискретизации A/D преобразователем 31, вводится на преобразователь 110 частоты. Сигнал фазы и скорости, дискретизированный для преобразования в цифровой сигнал при произвольном интервале дискретизации A/D преобразователем 35, вводится на преобразователь 140 частоты.
Когда сигнал фазы и скорости дискретизируется для преобразования в цифровой сигнал при произвольном интервале дискретизации на этапе 210, на этапе 220 выходная частота устанавливается для трансмиттера 120 для опорного сигнала, чтобы тем самым создать опорный сигнал. Когда опорный сигнал создан, опорный сигнал, с установленной в трансмиттере 120 частотой выводится из трансмиттера 120 и вводится на преобразователи 110 и 140 частоты.
Когда опорный сигнал создается в трансмиттере 120 на этапе 220, обработка преобразователями 110 и 140 частоты выполняется на этапе 230. Поэтому преобразователь 110 частоты, на который вводится опорный частотно-кодированный сигнал, выводимый из трансмиттера 120, преобразовывает сигнал фазы и скорости, выводимый из A/D преобразователя 31, в сигнал фазы и скорости, имеющий произвольную частоту на основании опорного сигнала, выводимого из трансмиттера 120.
Кроме того, преобразователь 140 частоты, на который вводится опорный частотно-кодированный сигнал, выводимый из трансмиттера 120, преобразовывает сигнал фазы и скорости, выводимый из A/D преобразователя 35 в сигнал фазы и скорости, имеющий произвольную частоту на основании опорного сигнала, выводимого от трансмиттера 120.
Когда преобразование в сигнал фазы и скорости произвольной частоты выполнено на этапе 230, частота после преобразования частоты измеряется на этапе 240 и сравнивается с заданной частотой для частотной модуляции при начальной установке.
То есть сигнал фазы и скорости, который выведен из A/D преобразователя 31, и получен преобразованием в произвольную частоту преобразователем 110 частоты, вводится на модуль 160 измерения частоты и модуль 130 измерения фазы. Затем частота, после преобразования частоты, измеряется модулем 160 измерения частоты и сравнивается с заданной частотой для частотной модуляции при начальной установке, которая выводится от трансмиттера 120.
Когда сравнение с заданной частотой для частотной модуляции при начальной установке выполнено на этапе 240, следующая передаваемая частота опорного сигнала, выводимого от трансмиттера 120, определяется на этапе 250.
То есть на этапе 250, следующая передаваемая частота опорного сигнала, выводимого от трансмиттера 120, определяется так, что разность частот, полученная сравнением на этапе 240, становится равной 0 Гц.
Когда следующая передаваемая частота опорного сигнала, выводимого от трансмиттера 120, определена на этапе 250, на этапе 260 выполняется измерение фазы.
То есть на этапе 260, сигнал фазы и скорости, полученный преобразованием в произвольную постоянную частоту на основании передаваемой частоты опорного сигнала, выводимого от трансмиттера 120, вводится на модуль 130 измерения фазы. Модуль 130 измерения фазы выполняет измерение фазы с использованием FFT, или подобного, на основании сигнала фазы и скорости, полученного преобразованием в произвольную постоянную частоту, который выводится от преобразователя 110 частоты. Когда измерение фазы выполнено с использованием FFT, или подобного, как описано выше, всегда может быть выполнено измерение разности фаз с высокой точностью, при том же самом времени вычислений.
Далее, рассматриваются четыре блока, включающие в себя блоки 110 и 140 преобразования частоты, трансмиттер 120, модуль 130 измерения разности фаз и блок 160 измерения частоты, включенные в устройство 100 обработки сигналов.
(1) Блок Преобразования Частоты
Блок 110 преобразования частоты устройства 100 обработки сигналов имеет такую структуру, как показано на Фиг.11.
На Фиг.11 блок 110 преобразования частоты включает в себя умножитель 111, фильтр 112 нижних частот (LPF) (или фильтр верхних частот (HPF)).
Опорный сигнал cosθ2 от трансмиттера 120 и входной сигнал SINθ1 от A/D преобразователя 31 перемножаются друг с другом и затем подвергаются обработке фильтрацией фильтром 112 нижних частот.
Опорный сигнал cosθ2 от трансмиттера 120 умножается на входной сигнал sinθ1, полученный преобразованием в цифровой сигнал A/D преобразователем 31 низкочастотного левого сигнала скорости (сигнал скорости выпускной стороны), который регистрируется левым тензометрическим датчиком (левый датчик скорости) 7, и выделяется фильтром 30 нижних частот и затем выводится из него, чтобы тем самым объединить сумму и разность частотно-кодированных сигналов.
[Выражение 13]
sinθ1·cosθ2=1/2(sin(θ1+θ2)+sin(θl-θ2)) (13)
Сумма и разность частотно-кодированных сигналов фильтруются фильтром 112 нижних частот (или фильтром верхних частот), чтобы выделить только разностный сигнал (или суммарный сигнал).
В данном случае, для определенности описания, выделяется суммарный сигнал. Однако даже когда выделяется разностный сигнал нет никаких проблем и, следовательно, способ обработки фильтрацией применяется как соответствующий способу преобразования частоты.
Выходной сигнал от фильтра 112 нижних частот (или фильтра верхних частот) выражается следующим образом.
[Выражение 14]
1/2(sin(θ1+θ2)) (14)
В этом случае частота θ3 выходного сигнала от фильтра 112 нижних частот (или фильтра верхних частот) всегда приводится к постоянному значению.
Поэтому тот же самый фильтр всегда может быть использован вне зависимости от входного сигнала.
Таким образом, измерение фазы в модуле 130 измерения разности фаз, расположенном в последующем каскаде блока 110 преобразования частоты, может быть в высокой степени унифицированным и упрощенным.
(2) Блок Измерения Частоты
В этом варианте реализации, для способа измерения частоты используется принцип петли фазовой синхронизации (PLL). PLL представляет собой известную электронную схему, в который сигнал, который равен по частоте входному сигналу переменного тока и синхронизирован с ним по фазе, выводится от другого генератора посредством управления с обратной связью.
Поэтому PLL представляет собой по существу схему с фазовой синхронизацией и может произвести сигнал, синхронизированный по фазе с входным сигналом.
PLL представляет собой генераторную схему для управления генератором в петле обратной связи, обеспечивающим такую генерацию, при которой разность фаз между опорным сигналом, вводимым извне, и выходным сигналом генератора в петле была бы постоянной. Поэтому PLL может быть относительно легко создан с использованием вычислительного устройства и может выполнять высокоскоростной расчет.
Блок 160 измерения частоты устройства 100 обработки сигналов имеет такую структуру, как показано на Фиг.12.
На Фиг.12 блок 160 измерения частоты включает в себя умножитель 161, фильтр 162 нижних частот (LPF), и трансмиттер 163 для измерения частоты.
Блок 110 преобразования частоты соединяется с умножителем 161. Преобразованный по частоте сигнал sin(θ+θXn), полученный добавлением (или вычитанием) выходной частоты θXn, выводимой от трансмиттера 120, к (или из) частоте θ входного сигнала, полученной преобразованием в цифровой сигнал A/D преобразователем 31 низкочастотного левого сигнала скорости (сигнал скорости выпускной стороны), который регистрируется левым тензометрическим датчиком (левый датчик скорости) 7 и выделяется фильтром 30 нижних частот, выводится из блока 110 преобразования частоты и вводится на умножитель 161.
Затем умножитель 161 сравнивает фазу выходного сигнала блока 110 преобразования частоты с фазой выходного сигнала cosδ, выводимого от трансмиттера 163, для измерения частоты, и выводит сигналы как разностный сигнал и суммарный сигнал на фильтр 162 нижних частот.
Поэтому выходная часть умножителя 161 соединяется с фильтром 162 нижних частот. Фильтр 162 нижних частот выделяет только низкочастотный сигнал из выходного сигнала, выводимого от умножителя 161 через частотный фильтр.
Таким образом, в этом случае только разностная компонента выделяется из выходного сигнала, выводимого от умножителя 161.
Фильтр 162 нижних частот соединяется с трансмиттером 163 для измерения частоты. Трансмиттер 163 для измерения частоты создает данные фазы δ на основании низкочастотного сигнала, выводимого от фильтра 162 нижних частот.
Петля обратной связи сформирована так, чтобы выходные данные "V" (функция V вычисления частоты) только разностной компоненты, полученной фильтрацией фильтром 162 нижних частот, становились бы равными 0.
Как показано на Фиг.12, входной сигнал, который выводится из блока 110 преобразования частоты и вводится на умножитель 161, выражается как sinθ, и выходной сигнал, который выводится от трансмиттера 120 и вводится на умножитель 161, выражается как cosδ. Когда эти два колебательных сигнала перемножаются умножителем 161, получается следующее.
[Выражение 15]
sinθ·cosθ=1/2(sin(θ+δ)+sin(θ-δ)) (15)
Входной колебательный сигнал: sinθ
Выходной колебательный сигнал трансмиттера для измерения частоты: cosδ
Когда результат, полученный перемножением умножителем 161, как это выражено Выражением (14), фильтруется фильтром 162 нижних частот, высокочастотная компонента удаляется, чтобы получить следующее выражение.
[Выражение 16]
V=sin(θ-δ) (16)
Когда значение (θ-δ) в Выражении (15) представляет собой достаточно малое значение (V≈0), функция V вычисления частоты, указывающая результат, полученный перемножением умножителем 161, может быть приблизительно выражена следующим образом.
[Выражение 17]
V=θ-δ≈0 (17)
Когда выходной колебательный сигнал трансмиттера 163 для измерения частоты регулируется так, чтобы функция V вычисления частоты становилась бы равной 0, может быть получена предыдущая фаза θ преобразованием частоты блоком 110 преобразования частоты.
Когда фаза θ, выводимая из блока 110 преобразования частоты, которая получается после преобразования частоты, как описано выше, рассчитывается с использованием следующих Выражений (18) и (19), может быть получена частота "f".
[Выражение 18]
Δθ/ΔT=ω=2·π·f (18)
ω: Угловая скорость (рад/с)
Отметим, что ΔТ указывает изменение времени и равно времени вычисления (частота дискретизации).
Поэтому изменение фазы (θ) определяется следующим образом.
[Выражение 19]
θ=2·π·f·Ta (19),
где Та: изменение времени (интервал дискретизации) (сек).
f: входная частота (Гц)
θ: изменение фазы (радиан)
Входная частота "f" определяется следующим образом.
[Выражение 20]
Т: интервал дискретизации
Когда такое вычисление выполняется модулем 160 измерения частоты, можно достичь высокоскоростного измерения частоты.
(3) Трансмиттер
На Фиг.3 выходная частота модулируемого трансмиттера 120 регулируется на основании результата (θ+θXn), полученного измерением блоком 160 измерения частоты.
То есть в трансмиттере 120 частота θ регистрируемого сигнала скорости колебаний (сигнал скорости выпускной стороны) создается на левой стороне измерительных трубок 2 и 3, который регистрируется левым тензометрическим датчиком 7 и вводится на блок 110 преобразования частоты в случае, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6, регулируется до желаемой частоты, обрабатываемой модулем 130 измерения разности фаз.
Блок 110 преобразования частоты и блок 140 преобразования частоты имеют одинаковую структуру. Поэтому как и в случае вывода частоты из блока 110 преобразования частоты, частота, выводимая из блока 140 преобразования частоты, более определенно, частота (θ+δφ) регистрируемого сигнала скорости колебаний (сигнал скорости впускной стороны), создаваемый на правой стороне измерительных трубок 2 и 3, который регистрируется правым тензометрическим датчиком 8 и вводится на блок 140 преобразования частоты в случае, когда измерительные трубки 2 и 3 колеблются посредством вибратора 6, преобразуется в желаемую частоту.
(4) Модуль Измерения Разности фаз
Существуют различные способы измерения фазы. В случае измерения фазы с использованием Фурье преобразования, частота фиксирована и, следовательно, можно достичь высокоскоростного расчета.
Далее, рассматривается пример дискретного Фурье преобразования (DFT). Дискретное Фурье преобразование представляет собой Фурье преобразование на дискретной группе, часто используемое для частотного анализа дискретных цифровых сигналов при обработке сигналов, и также используемое для эффективного расчета дифференциальных уравнений с частными производными или интегралов свертки. Дискретное Фурье преобразование может быть вычислено с высокой скоростью (компьютером) с использованием быстрого преобразования Фурье (FFT).
Когда входной сигнал, дискретизированный в модуле 130 измерения разности фаз, выражается посредством g(n), DFT-G(k) определяется следующим образом.
[Выражение 21]
G(k)=

k=0, 1,…, N-1.
Для более простого выражения, когда часть сложной экспоненциальной функции выражается следующей заменой,
[Выражение 22]
Wn=exp(-j2π/N)=cos(2π/N)-jsin(2π/N) (22)
Выражение (21) записывается следующим образом.
[Выражение 23]
G(k)=

Предположим, что внимание сосредоточено на сложной экспоненциальной функции WNnk, и N выражается как N=2M (М - целое число), и, например, N=8. Когда входная частота составляет 1/4 частоты дискретизации, вещественная часть функции и мнимая часть функции могут быть выражены как 0. 1, и -1 вследствие периодичности тригонометрических функций.
[Выражение 24]
Поэтому входные сигналы LPO и RPO, полученные преобразованием частоты в 1/4 частоты дискретизации, могут быть очень просто подвергнуты Фурье преобразованию. При нормальном измерении фазы только единственную частоту (частота колебаний) желательно подвергнуть Фурье преобразованию, и преобразование для другой полосы частот не выполняется и, следовательно, расчет может быть выполнен только добавлением и вычитанием.
Фактически, когда входной сигнал, вводимый на блок 130 измерения разности фаз, выражается как g(n), входной сигнал g(n) имеет частоту в 1/4 частоты дискретизации, и N выражается как N=2M (М - целое число), DFT-G(k) может быть рассчитано следующим образом.
[Выражение 25]
Вычисление вещественной части (Re) Вычисление мнимой части (Im)
Даже когда значение М увеличивается, основной расчет полностью не меняется. Поэтому когда М увеличивается, вычисление может быть выполнено с очень высокой точностью, и вычислительная нагрузка почти не изменяется.
Когда два входных сигнала подвергаются дискретному Фурье преобразованию (DFT) по описанной выше процедуре, сигнал RPO может быть заменен следующим образом.
[Выражение 26]
сигнал RPO:
½(sin(θ+θx))= ½(sin(θc))½exp(jθc)=Re1+jIm1 (26)
и сигнал LPO может быть заменен следующим образом.
[Выражение 27]
сигнал LPO:
½(sin(θ+δφ+θx))=½(sin(θc+δφ))=½exp(j(θc+δφ))=Re2+jIm2 (27)
В этом случае фазовый угол tanδφ входного сигнала выражается следующим образом.
[Выражение 28]
tanδφ=(Im2Re1-Re2Im1)/(Re2Re1+Im2Im1) (28)
После того как фазовый угол tanδφ входного сигнала получен c использованием Выражения (28), когда tan-1δφ рассчитан, может быть получен сигнал δφ разности фаз.
Массовый расход Q измеряемого флюида пропорционален фазовому углу и обратно пропорционален приводной частоте F и таким образом выражается следующим образом.
[Выражение 29]
Q=S(t)·δφ/F, (29)
где S(t) обозначает корректирующий коэффициент, связанный с температурой измеряемого флюида.
Когда измеряемый фазовый угол δφ и приводная частота F подставляются в Выражение (28), может быть рассчитан массовый расход Q.
Массовый расход Q, полученный, как описано выше, подвергается соответствующему масштабированию и преобразованию единиц и может быть выведен наружу в различных формах, добавляя последующую обработку, например, в виде аналогового выходного сигнала, импульсного выходного сигнала или последовательной передачи данных.
<<Признак Способа Измерения Фазы с использованием Преобразования Частоты>>
В соответствии с признаком системы измерения фазы по настоящему изобретению, сигнал может быть дискретизирован с интервалом дискретизации, не связанным с частотой θ входного сигнала, который получен преобразованием в цифровой сигнал A/D преобразователем 31 низкочастотного левого сигнала скорости (сигнал скорости выпускной стороны), который регистрируется левым тензометрическим датчиком (левый датчик скорости) 7 и выделяется фильтром 30 нижних частот и выводится из него, и который вводится на блок 110 преобразования частоты. Поэтому конструкция очень проста, не требуется таблицы фильтрации и можно достичь очень высокоскоростного счета с малой вычислительной ошибкой.
В соответствии с системой измерения фазы по настоящему изобретению, даже когда происходит быстрое изменение частоты входного сигнала, который получен преобразованием в цифровой сигнал A/D преобразователем 31 низкочастотного левого сигнала скорости (сигнала скорости выпускной стороны), который регистрируется левым тензометрическим датчиком (левый датчик скорости) 7 и выделяется фильтром 30 нижних частот и который вводится на блок 110 преобразования частоты, последующий быстрый отклик может быть достигнут посредством петли обратной связи преобразования частоты. Частота после преобразования частоты непосредственно измеряется, чтобы выполнить измерение фазы и, следовательно, ошибка преобразования частоты, вызванная преобразованием частоты, минимизируется. Поэтому система является подходящей для очень надежного и точного измерения фазы.
В дополнение к измерению фазы, частота входного сигнала может быть одновременно получена на основании частоты после преобразования частоты и частоты передачи трансмиттера 120.
Полученная частота представляет собой частоту, которая является очень быстро откликающейся и очень устойчивой вследствие высокоскоростной петли обратной связи.
Кроме того, в соответствии с системой измерения фазы по настоящему изобретению, имеется только небольшое ограничение на полосу измерения фазы из-за входной частоты входного сигнала, вводимого на блок 110 преобразования частоты. Поэтому может быть реализована связь с датчиками, имеющими различные приводные частоты, и точность вычислений не зависит от входной частоты и, следовательно, всегда можно достичь высокой точности измерения фазы.
[Вариант реализации 3]
Измерительные трубки 2 и 3, включающие в себя, по меньшей мере, одну расходомерную трубку или пару расходомерных трубок, служащие измерительными расходомерными трубками, управляются приводным устройством, использующим вибратор 6. Измерительные трубки 2 и 3, включающие в себя одну расходомерную трубку или пару расходомерных трубок, поочередно возбуждаются, чтобы возбудить колебания расходомерных трубок. В расходомере Кориолиса разность фаз и/или частота колебаний, пропорциональные силе Кориолиса, действующей на измерительные трубки 2 и 3, включающие в себя одну расходомерную трубку или пару расходомерных трубок, регистрируется парой датчиков скорости или датчиков ускорения, соответствующих датчикам регистрации колебаний, включающих в себя левый тензометрический датчик (LPO) 7 и правый тензометрический датчик (RPO) 8, чтобы тем самым получить массовый расход и/или плотность измеряемого флюида.
Трансмиттер 120 для передачи и вывода модулируемого частотно-кодированного сигнала предоставляется в расходомере Кориолиса.
Сигнал датчика скорости (например, входной сигнал (сигнал скорости выпускной стороны), вводимый от левого тензометрического датчика 7) от одного из пары датчиков регистрации колебаний (левый тензометрический датчик 7 и правый тензометрический датчик 8), преобразуется в цифровой сигнал первым A/D преобразователем 31. Первый блок 110 преобразования частоты предоставляется, чтобы сдвинуть частоту θ входного сигнала до определенной постоянной частоты на основании выходной частоты θXn, выводимой от трансмиттера 120, чтобы тем самым переместить частоту входного сигнала в желаемую полосу частот.
Второй блок 140 преобразования предоставляется, чтобы сдвинуть частоту θ входного сигнала до определенной постоянной частоты, полученную преобразованием в цифровой сигнал вторым A/D преобразователем 35, сигнала датчика скорости (например, входной сигнал (сигнал скорости впускной стороны), вводимый от правого тензометрического датчика 8) от другого из пары датчиков регистрации колебаний (левый тензометрический датчик 7 и правый тензометрический датчик 8) на основании выходной частоты θXn, выводимой от трансмиттера 120, чтобы тем самым переместить частоту входного сигнала в желаемую полосу частот.
Блок 160 измерения частоты предоставляется для измерения частоты первого частотно-кодированного сигнала, который получен преобразованием как сигнал с постоянной частотой, и выводится от первого блока 110 преобразования частоты, и для вывода измеренного значения частоты первого частотно-кодированного сигнала на трансмиттер 120, чтобы тем самым управлять выходной частотой так, чтобы частота, полученная преобразованием частоты блоком 110 преобразования частоты, всегда становилась бы постоянной частотой.
Блок 130 измерения разности фаз предоставляется для измерения разности фаз между первым частотно-кодированным сигналом, полученным преобразованием как сигнал с постоянной частотой, первым блоком 110 преобразования частоты и вторым частотно-кодированным сигналом, выводимым как преобразованный сигнал с постоянной частотой от второго блока 140 преобразования частоты.
Кроме того, устройство 100 обработки сигналов предоставляется, чтобы получить разность фаз между первым частотно-кодированным сигналом, выводимым как преобразованный сигнал с постоянной частотой от первого блока 110 преобразования частоты, и вторым частотно-кодированным сигналом, выводимым как преобразованный сигнал с постоянной частотой от второго блока 140 преобразования частоты, чтобы тем самым служить в качестве расходомера Кориолиса.
[Описание обозначений]
1 расходомер Кориолиса
2, 3 измерительные трубки
4 детектор
5 преобразователь
6 вибратор
7 левый датчик скорости
8 правый датчик скорости
9 температурный датчик
10 блок управления приводом
11 блок измерения фазы
12 блок измерения температуры
30, 34 фильтр нижних частот
31, 35 A/D преобразователь
70 датчик скорости колебаний
80 вычислительное устройство сигналов скорости колебаний
85 блок преобразования частоты
90 трансмиттер
95 модуль измерения разности фаз
100 устройство обработки сигналов
110 блок преобразования частоты
111 умножитель
112 фильтр нижних частот
120 трансмиттер
130 модуль измерения разности фаз
140 блок преобразования частоты
150 тактовый генератор
160 блок измерения частоты
161 умножитель
162 фильтр нижних частот
163 трансмиттер для измерения частоты
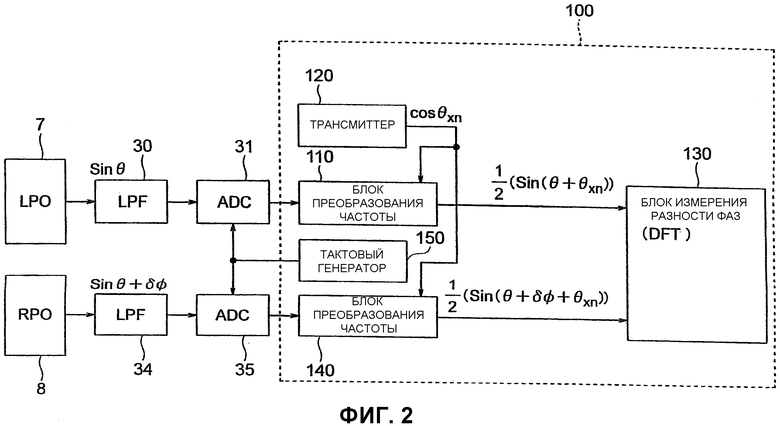
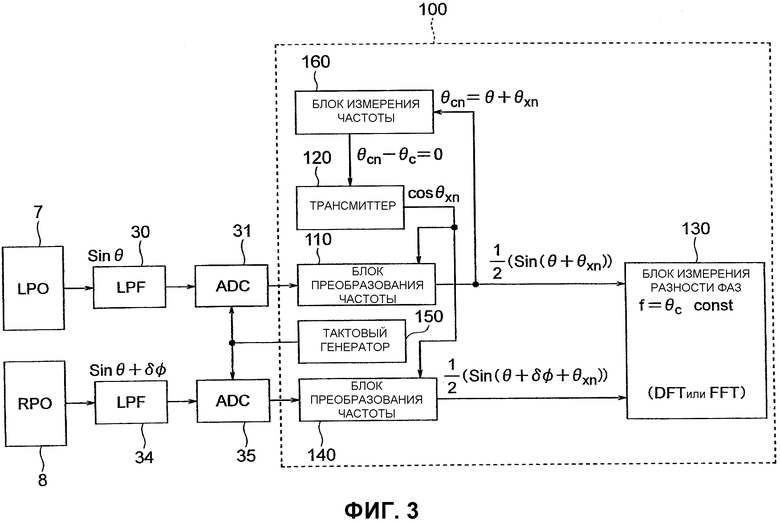
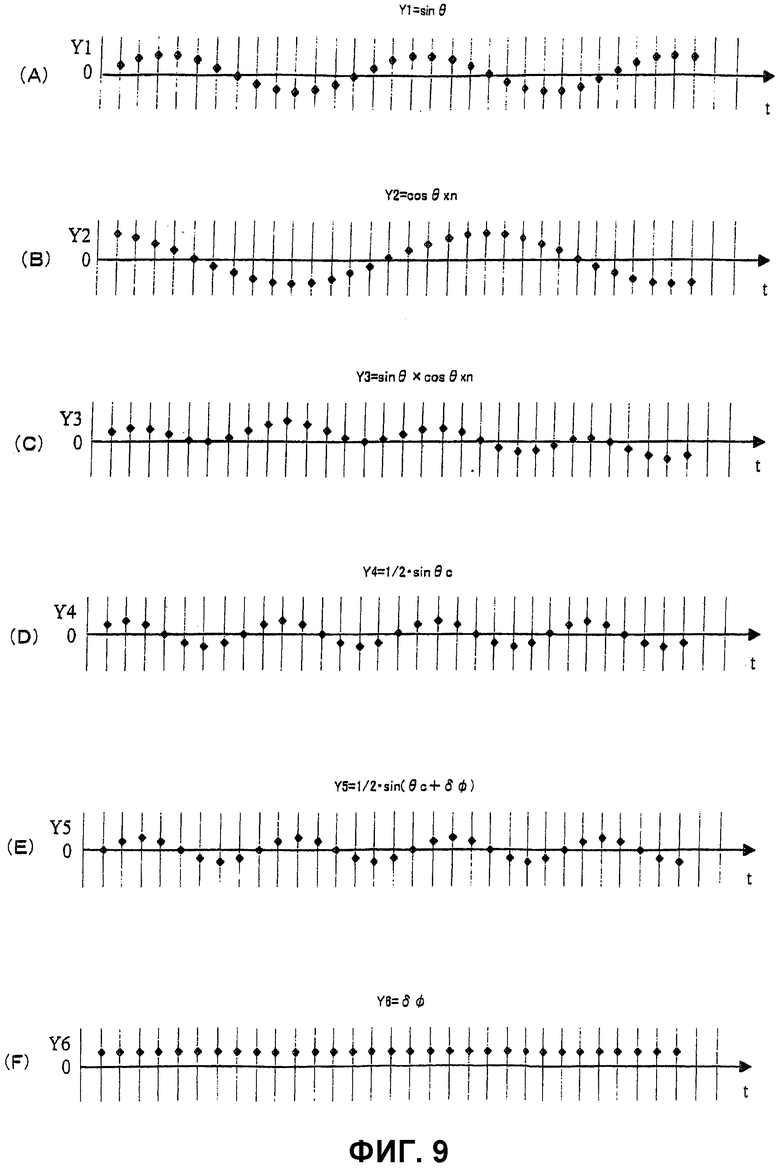
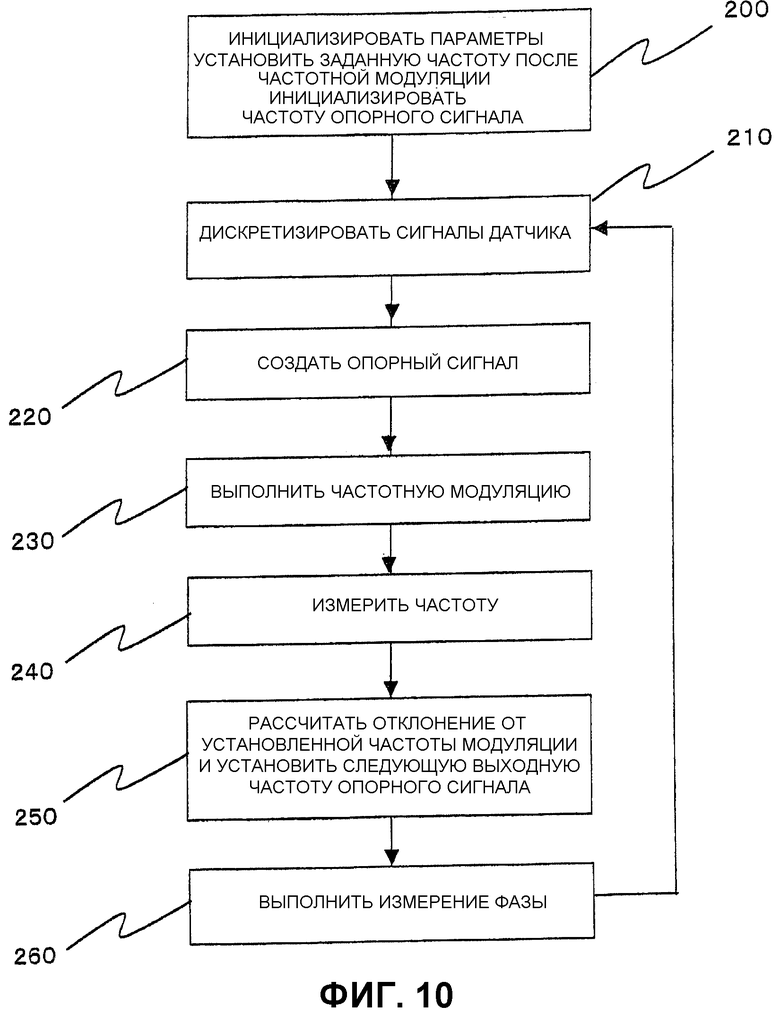
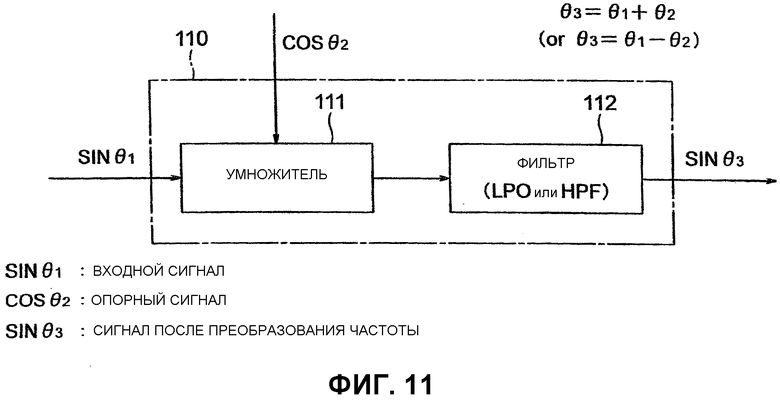
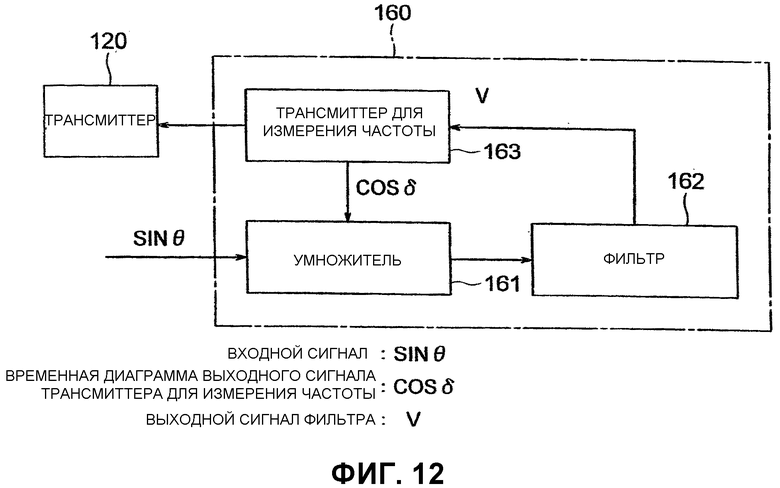
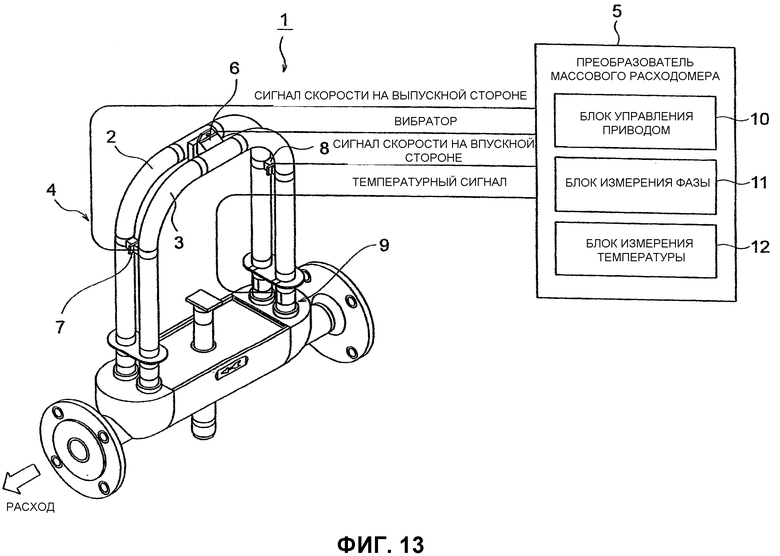
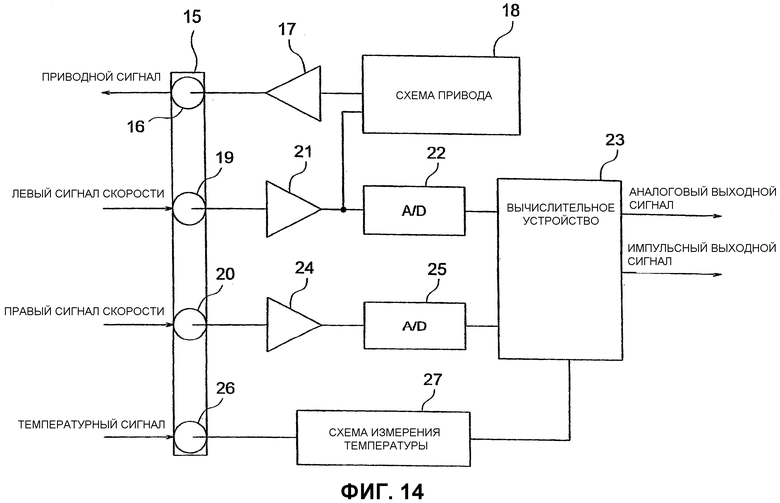

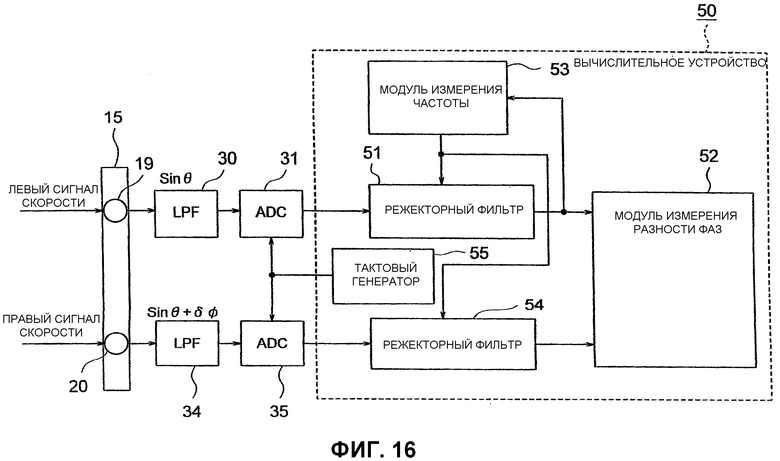
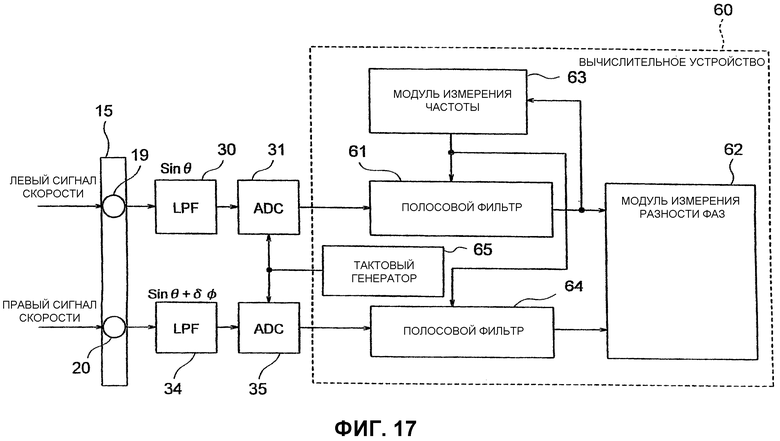
Устройство обработки сигналов для расходомера Кориолиса, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок поочередно возбуждаются посредством вибратора, приводимого в действие приводным устройством, чтобы возбудить колебания, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, и, по меньшей мере, одно - разность фаз и частота колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, регистрируется датчиками скорости или датчиками ускорения, которые являются датчиками регистрации колебаний, чтобы тем самым получить, по меньшей мере, одно - массовый расход и плотность измеряемого флюида, включает в себя трансмиттер (90) для передачи частотно-кодированного сигнала, который является модулируемым, и блок (85) преобразования частоты для выполнения преобразования частоты, чтобы добавить (или вычесть) частоту Fx выходного сигнала от трансмиттера (90) к (или из) частоте входного сигнала, регистрируемой датчиком скорости или датчиком ускорения, и смещения значения частоты, полученного преобразованием частоты, к постоянному значению. Технический результат - возможность измерения с неизменной точностью, измерение фазы и частоты с высоким качеством фильтрации и существенное сокращение количества вычислительных операций. 5 н. и 39 з.п. ф-лы, 17 ил.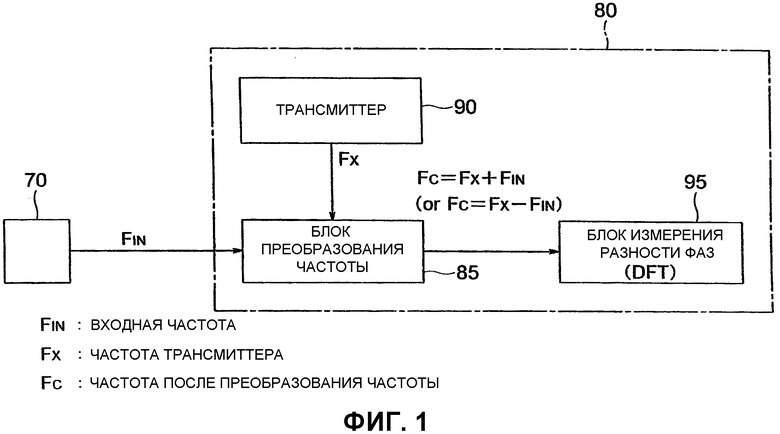
1. Способ обработки сигналов для расходомера Кориолиса, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая составляет измерительную расходомерную трубку, поочередно возбуждаются посредством вибратора, приводимого в действие приводным устройством, чтобы возбудить колебания, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, и, по меньшей мере, одно - разность фаз и частота колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, регистрируется двумя датчиками скорости или датчиками ускорения, которые являются датчиками регистрации колебаний, чтобы тем самым получить, по меньшей мере, одно - массовый расход и плотность измеряемого флюида,
способ обработки сигналов, содержащий:
выполнение преобразования частоты, чтобы объединить, исходя из произвольной частоты колебаний, каждый из двух сигналов расхода, полученных посредством A/D преобразования входных сигналов с частотой колебаний, пропорциональной силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, которые регистрируются двумя датчиками скорости или датчиками ускорения, чтобы получить композитный частотно-кодированный сигнал;
измерение частоты композитного частотно-кодированного сигнала, связанного, по меньшей мере, с одним из двух датчиков скорости или датчиков ускорения;
передачу сигнала управления, исходя из измеренной частоты;
приведение частоты суммы или разности частотных компонент композитного частотно-кодированного сигнала к постоянному значению;
получение резонансной частоты, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок на основании управляющего сигнала, расчет плотности измеряемого флюида на основании управляющего сигнала; и
измерение фазы из суммы или разности частотных компонент композитного частотно-кодированного сигнала, имеющего управляемую частоту.
2. Способ обработки сигналов по п.1, причем преобразование частоты для объединения, исходя из произвольной частоты колебаний, включает в себя:
умножение входного сигнала SINθ1 от одного из двух датчиков скорости или датчиков ускорения на передаваемый управляющий сигнал cosθ2; и
фильтрацию выходного сигнала, полученного умножением, посредством частотного фильтра, чтобы выделить только низкочастотный сигнал.
3. Способ обработки сигналов по п.1, причем преобразование частоты для объединения, исходя из произвольной частоты колебаний, включает в себя:
умножение входного сигнала SINθ1 от одного из двух датчиков скорости или датчиков ускорения на передаваемый управляющий сигнал cosθ2; и
фильтрацию выходного сигнала, полученного умножением, посредством частотного фильтра, чтобы выделить только высокочастотный сигнал.
4. Способ обработки сигналов по п.1, причем
входные сигналы с частотой колебаний, пропорциональной силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, которые регистрируются двумя датчиками скорости или датчиками ускорения, дискретизируются посредством A/D преобразования, чтобы получить цифровые сигналы; и
композитный частотно-кодированный сигнал, полученный преобразованием частоты на основании переданного управляющего сигнала, регулируется так, чтобы частота суммы или разности частотных компонент композитного частотно-кодированного сигнала составляла 1/4 частоты дискретизации для A/D преобразования.
5. Устройство обработки сигналов для расходомера Кориолиса, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая составляет измерительную расходомерную трубку, поочередно возбуждаются посредством вибратора, приводимого в действие приводным устройством, чтобы возбудить колебания, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, и, по меньшей мере, одно - разность фаз и частота колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, регистрируется датчиком скорости или датчиком ускорения, который является датчиком регистрации колебаний, чтобы тем самым получить, по меньшей мере, одно - массовый расход и плотность измеряемого флюида, при этом
устройство обработки сигналов содержит:
трансмиттер для передачи частотно-кодированного сигнала, который является модулируемым, и
блок преобразования частоты для выполнения преобразования частоты, чтобы добавить (или вычесть) выходную частоту Fx от трансмиттера к (или из) входной частоте, регистрируемой датчиком скорости или датчиком ускорения, и смещения значения частоты, полученного преобразованием частоты, к постоянному значению.
6. Устройство обработки сигналов по п.5, причем блок преобразования частоты содержит:
умножитель для умножения опорного сигнала cosθ2 от трансмиттера на входной сигнал SINθ1 от первого A/D преобразователя; и
фильтр нижних частот для фильтрации выходного сигнала, полученного умножением умножителем, с помощью частотного фильтра, чтобы выделить только низкочастотный сигнал.
7. Устройство обработки сигналов по п.6, причем
блок измерения частоты содержит умножитель, соединенный с первым блоком преобразования частоты, фильтр нижних частот, соединенный с умножителем, и трансмиттер для измерения частоты, который соединяется с фильтром нижних частот и принимает выходной сигнал от фильтра нижних частот;
умножитель сравнивает выходной сигнал sin(θ+θxn) от первого блока преобразования частоты с фазой выходного сигнала cosδ от трансмиттера для измерения частоты и выводит разностный сигнал и суммарный сигнал на фильтр нижних частот;
фильтр нижних частот фильтрует выходной сигнал от умножителя с помощью частотного фильтра, чтобы выделить только низкочастотный сигнал; и
значение фазы V фундаментального выходного колебательного сигнала создается на основании низкочастотного выходного сигнала от фильтра нижних частот и удовлетворяет условию V=0 посредством трансмиттера для измерения частоты.
8. Устройство обработки сигналов по п.7, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
9. Устройство обработки сигналов по п.6, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
10. Устройство обработки сигналов по п.9, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
11. Устройство обработки сигналов по п.6, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
12. Устройство обработки сигналов по п.5, причем блок преобразования частоты содержит:
умножитель для умножения опорного сигнала cosθ2 от трансмиттера на входной сигнал SINθ1 от первого A/D преобразователя; и
фильтр верхних частот для фильтрации выходного сигнала, полученного умножением умножителем, с помощью частотного фильтра, чтобы выделить только высокочастотный сигнал.
13. Устройство обработки сигналов по п.12, причем
блок измерения частоты содержит умножитель, соединенный с первым блоком преобразования частоты, фильтр нижних частот, соединенный с умножителем, и трансмиттер для измерения частоты, который соединяется с фильтром нижних частот и принимает выходной сигнал от фильтра нижних частот;
умножитель сравнивает выходной сигнал sin(θ+θxn) от первого блока преобразования частоты с фазой выходного сигнала cosδ от трансмиттера для измерения частоты и выводит разностный сигнал и суммарный сигнал на фильтр нижних частот;
фильтр нижних частот фильтрует выходной сигнал от умножителя с помощью частотного фильтра, чтобы выделить только низкочастотный сигнал; и
значение фазы V фундаментального выходного колебательного сигнала создается на основании низкочастотного выходного сигнала от фильтра нижних частот и удовлетворяет условию V=0 посредством трансмиттера для измерения частоты.
14. Устройство обработки сигналов по п.13, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
15. Устройство обработки сигналов по п.12, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
16. Устройство обработки сигналов по п.15, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
17. Устройство обработки сигналов по п.12, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
18. Устройство обработки сигналов для расходомера Кориолиса, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая составляет измерительную расходомерную трубку, поочередно возбуждаются посредством вибратора, приводимого в действие приводным устройством, чтобы возбудить колебания, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, и, по меньшей мере, одно - разность фаз и частота колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, регистрируется парой датчиков скорости или датчиков ускорения, которые являются парой датчиков регистрации колебаний, чтобы тем самым получить, по меньшей мере, одно - массовый расход и плотность измеряемого флюида, при этом
устройство обработки сигналов содержит:
трансмиттер для передачи частотно-кодированного сигнала, который является модулируемым;
первый блок преобразования частоты для выполнения преобразования частоты, чтобы добавить (или вычесть) выходную частоту от трансмиттера к (или из) частоте входного сигнала, полученной преобразованием сигнала одного из пары датчиков регистрации колебаний в цифровой сигнал посредством первого A/D преобразователя, чтобы отрегулировать значение частоты, полученное преобразованием частоты, до постоянного значения; и
второй блок преобразования частоты для выполнения преобразования частоты, чтобы добавить (или вычесть) выходную частоту от трансмиттера к (или из) частоте входного сигнала, полученной преобразованием сигнала другого одного из пары датчиков регистрации колебаний в цифровой сигнал посредством второго A/D преобразователя, чтобы отрегулировать значение частоты, полученное преобразованием частоты, до постоянного значения.
19. Устройство обработки сигналов по п.18, причем блок преобразования частоты содержит:
умножитель для умножения опорного сигнала cosθ2 от трансмиттера на входной сигнал SINθ1 от первого A/D преобразователя; и
фильтр верхних частот для фильтрации выходного сигнала, полученного умножением умножителем, с помощью частотного фильтра, чтобы выделить только высокочастотный сигнал.
20. Устройство обработки сигналов по п.19, причем
блок измерения частоты содержит умножитель, соединенный с первым блоком преобразования частоты, фильтр нижних частот, соединенный с умножителем, и трансмиттер для измерения частоты, который соединяется с фильтром нижних частот и принимает выходной сигнал от фильтра нижних частот;
умножитель сравнивает выходной сигнал sin(θ+θxn) от первого блока преобразования частоты с фазой выходного сигнала cosδ от трансмиттера для измерения частоты и выводит разностный сигнал и суммарный сигнал на фильтр нижних частот;
фильтр нижних частот фильтрует выходной сигнал от умножителя с помощью частотного фильтра, чтобы выделить только низкочастотный сигнал; и
значение фазы V фундаментального выходного колебательного сигнала создается на основании низкочастотного выходного сигнала от фильтра нижних частот и удовлетворяет условию V=0 посредством трансмиттера для измерения частоты.
21. Устройство обработки сигналов по п.20, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
22. Устройство обработки сигналов по п.19, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
23. Устройство обработки сигналов по п.22, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
24. Устройство обработки сигналов по п.19, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
25. Устройство обработки сигналов по п.18, причем блок преобразования частоты содержит:
умножитель для умножения опорного сигнала cosθ2 от трансмиттера на входной сигнал SINθ1 от первого A/D преобразователя; и
фильтр верхних частот для фильтрации выходного сигнала, полученного умножением умножителем, с помощью частотного фильтра, чтобы выделить только высокочастотный сигнал.
26. Устройство обработки сигналов по п.25, причем
блок измерения частоты содержит умножитель, соединенный с первым блоком преобразования частоты, фильтр нижних частот, соединенный с умножителем, и трансмиттер для измерения частоты, который соединяется с фильтром нижних частот и принимает выходной сигнал от фильтра нижних частот;
умножитель сравнивает выходной сигнал sin(θ+θxn) от первого блока преобразования частоты с фазой выходного сигнала cosδ от трансмиттера для измерения частоты и выводит разностный сигнал и суммарный сигнал на фильтр нижних частот;
фильтр нижних частот фильтрует выходной сигнал от умножителя с помощью частотного фильтра, чтобы выделить только низкочастотный сигнал; и
значение фазы V фундаментального выходного колебательного сигнала создается на основании низкочастотного выходного сигнала от фильтра нижних частот и удовлетворяет условию V=0 посредством трансмиттера для измерения частоты.
27. Устройство обработки сигналов по п.26, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
28. Устройство обработки сигналов по п.25, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
29. Устройство обработки сигналов по п.28, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
30. Устройство обработки сигналов по п.25, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
31. Устройство обработки сигналов для расходомера Кориолиса, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая составляет измерительную расходомерную трубку, поочередно возбуждаются посредством вибратора, приводимого в действие приводным устройством, чтобы возбудить колебания, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, и, по меньшей мере, одно - разность фаз и частота колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, регистрируется парой датчиков регистрации колебаний, чтобы тем самым получить, по меньшей мере, одно - массовый расход и плотность измеряемого флюида, при этом
устройство обработки сигналов содержит:
трансмиттер для передачи частотно-кодированного сигнала, который является модулируемым;
первый блок преобразования частоты для смещения частоты до сигнала с постоянной частотой частоты входного сигнала, полученной преобразованием сигнала одного датчика скорости из пары датчиков регистрации колебаний в цифровой сигнал первым A/D преобразователем, исходя из выходной частоты от трансмиттера, чтобы переместить частоту входного сигнала в другую полосу частот;
второй блок преобразования частоты для сдвига частоты до сигнала с постоянной частотой частоты входного сигнала, полученной преобразованием сигнала другого датчика скорости из пары датчиков регистрации колебаний в цифровой сигнал вторым A/D преобразователем, исходя из выходной частоты от трансмиттера, чтобы переместить частоту входного сигнала в другую полосу частот; и
блок измерения частоты для измерения частоты первого частотно-кодированного сигнала, который получается как сигнал с постоянной частотой с помощью смещения и вывода от первого блока преобразования частоты, и вывода измеренной частоты первого частотно-кодированного сигнала на трансмиттер, чтобы управлять, исходя из частоты после смещения первым блоком преобразования частоты, выходными частотами от первого блока преобразования частоты и второго блока преобразования частоты так, чтобы частота входного сигнала, полученная преобразованием сигнала одного датчика скорости из пары датчиков регистрации колебаний в цифровой сигнал первым A/D преобразователем, была бы желаемой частотой.
32. Устройство обработки сигналов по п.31, причем блок преобразования частоты содержит:
умножитель для умножения опорного сигнала cosθ2 от трансмиттера на входной сигнал SINθ1 от первого A/D преобразователя; и
фильтр нижних частот для фильтрации выходного сигнала, полученного умножением умножителем, с помощью частотного фильтра, чтобы выделить только низкочастотный сигнал.
33. Устройство обработки сигналов по п.32, причем
блок измерения частоты содержит умножитель, соединенный с первым блоком преобразования частоты, фильтр нижних частот, соединенный с умножителем, и трансмиттер для измерения частоты, который соединяется с фильтром нижних частот и принимает выходной сигнал от фильтра нижних частот;
умножитель сравнивает выходной сигнал sin(θ+θxn) от первого блока преобразования частоты с фазой выходного сигнала cosδ от трансмиттера для измерения частоты и выводит разностный сигнал и суммарный сигнал на фильтр нижних частот;
фильтр нижних частот фильтрует выходной сигнал от умножителя с помощью частотного фильтра, чтобы выделить только низкочастотный сигнал; и
значение фазы V фундаментального выходного колебательного сигнала создается на основании низкочастотного выходного сигнала от фильтра нижних частот и удовлетворяет условию V=0 посредством трансмиттера для измерения частоты.
34. Устройство обработки сигналов по п.33, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
35. Устройство обработки сигналов по п.32, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
36. Устройство обработки сигналов по п.35, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
37. Устройство обработки сигналов по п.32, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
38. Устройство обработки сигналов по п.31, причем блок преобразования частоты содержит:
умножитель для умножения опорного сигнала cosθ2 от трансмиттера на входной сигнал SINθ1 от первого A/D преобразователя; и
фильтр нижних частот для фильтрации выходного сигнала, полученного умножением умножителем, с помощью частотного фильтра, чтобы выделить только низкочастотный сигнал.
39. Устройство обработки сигналов по п. 38, причем
блок измерения частоты содержит умножитель, соединенный с первым блоком преобразования частоты, фильтр нижних частот, соединенный с умножителем, и трансмиттер для измерения частоты, который соединяется с фильтром нижних частот и принимает выходной сигнал от фильтра нижних частот;
умножитель сравнивает выходной сигнал sin(θ+θxn) от первого блока преобразования частоты с фазой выходного сигнала cosδ от трансмиттера для измерения частоты и выводит разностный сигнал и суммарный сигнал на фильтр нижних частот;
фильтр нижних частот фильтрует выходной сигнал от умножителя с помощью частотного фильтра, чтобы выделить только низкочастотный сигнал; и
значение фазы V фундаментального выходного колебательного сигнала создается на основании низкочастотного выходного сигнала от фильтра нижних частот и удовлетворяет условию V=0 посредством трансмиттера для измерения частоты.
40. Устройство обработки сигналов по п.39, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
41. Устройство обработки сигналов по п.38, дополнительно содержащий тактовый генератор для синхронизации выходного сигнала первого A/D преобразователя и выходного сигнала второго A/D преобразователя, чтобы синхронизировать цифровой сигнал одного из пары датчиков регистрации колебаний, который выводится от первого A/D преобразователя, и цифровой сигнал другого из пары датчиков регистрации колебаний, который выводится от второго A/D преобразователя.
42. Устройство обработки сигналов по п.41, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
43. Устройство обработки сигналов по п.38, причем блок измерения фазы выполняет обработку дискретным Фурье преобразованием (DFT) или быстрым Фурье преобразованием (FFT).
44. Расходомер Кориолиса, в котором, по меньшей мере, одна расходомерная трубка или пара расходомерных трубок, которая составляет измерительную расходомерную трубку, поочередно возбуждаются посредством вибратора, приводимого в действие приводным устройством, чтобы возбудить колебания, по меньшей мере, одной расходомерной трубки или пары расходомерных трубок, и, по меньшей мере, одно - разность фаз и частота колебаний, пропорциональные силе Кориолиса, действующей, по меньшей мере, на одну расходомерную трубку или пару расходомерных трубок, регистрируется парой датчиков скорости или датчиков ускорения, которые являются парой датчиков регистрации колебаний, чтобы тем самым получить, по меньшей мере, одно - массовый расход и плотность измеряемого флюида, причем
расходомер Кориолиса содержит:
трансмиттер для передачи частотно-кодированного сигнала, который является модулируемым;
первый блок преобразования частоты для смещения частоты до сигнала с постоянной частотой частоты θ входного сигнала, полученной преобразованием сигнала одного датчика скорости из пары датчиков регистрации колебаний в цифровой сигнал первым A/D преобразователем, на основании выходной частоты θxn от трансмиттера, чтобы переместить частоту входного сигнала в желаемую полосу частот;
второй блок преобразования частоты для сдвига частоты до сигнала с постоянной частотой частоты θ входного сигнала, полученной преобразованием сигнала другого датчика скорости из пары датчиков регистрации колебаний в цифровой сигнал посредством второго A/D преобразователя, на основании выходной частоты θxn от трансмиттера, чтобы переместить частоту входного сигнала в желаемую полосу частот; и
блок измерения частоты для измерения частоты первого частотно-кодированного сигнала, который получается как сигнал постоянной частоты с помощью смещения и вывода от первого блока преобразования частоты, и вывода измеренной частоты первого частотно-кодированного сигнала на трансмиттер, чтобы управлять частотой выходного сигнала так, чтобы частота после смещения и первым блоком преобразования частоты, и вторым блоком преобразования частоты была бы желаемой частотой.
| ЭЛЕКТРОННАЯ СХЕМА ПОЛЕВОГО ПРИБОРА С СЕНСОРНЫМ БЛОКОМ ДЛЯ ТЕХНИКИ ИЗМЕРЕНИЯ ПРОЦЕССОВ | 2002 |
|
RU2289104C2 |
| US 7313488 B2, 25.12.2007 | |||
| ЭЛЕКТРОННОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБЫ ОПРЕДЕЛЕНИЯ РАЗНОСТИ ФАЗ МЕЖДУ ПЕРВЫМ СИГНАЛОМ ДАТЧИКА И ВТОРЫМ СИГНАЛОМ ДАТЧИКА РАСХОДОМЕРА | 2006 |
|
RU2373499C1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |

