Изобретение относится к области автоматики и может быть использовано на транспорте, прежде всего железнодорожном, в системах обеспечения безопасности и управления.
Известен блок безопасности, предупреждающий водителя о замедлении впереди идущего транспортного средства (СА 2663363, B60Q 1/44, 2009-10-22). Устройство содержит акселерометр, блок управления и стоп-сигнал. Недостатком данного устройства являются ограниченные функциональные возможности, оно не решает целый ряд задач безопасного управления транспортным средством в штатном режиме (например, блокировка дверей в процессе движения состава), а также при возникновении нештатной ситуации.
Более сложную структуру имеет блок раннего предупреждения аварийной ситуации, описанный в GB 1286251, G01S 13/78, 1972-08-23. Однако и его назначение ограничено предупреждением водителя о замедлении впереди идущего транспортного средства.
Интегрированный акселерометр используется в известном транспортном средстве для определения его скорости (US 2008150468, Н02Р 8/00, 2008-06-26). В данном случае акселерометр интегрирован в блок управления. Данное устройство не обеспечивает решения задач безопасного управления.
Известно также использование блока безопасности в виде электронной накладки, содержащей последовательно соединенные акселерометр, процессор, блок памяти, передатчик и антенну (GB 2436220, G01H 1/00, 2007-09-19). Акселерометр фиксирует удары и вибрацию, которые испытывает элемент конструкции, на котором закреплена наклейка, и эта информация после обработки и накопления передается с целью определения ресурса элемента конструкции. Пластина накладки является несущим элементом конструкции блока безопасности.
Данное устройство является наиболее близким к предложенному. Оно обеспечивает безопасное использование ответственных элементов конструкции транспортных средств, однако к его недостаткам следует отнести следующие:
- связь через радиоканал в ряде случаев (например, совместное воздействие импульсной электромагнитной помехи и ударной волны при взрыве) не является надежной;
- невозможность использования в штатном режиме в составе блока безопасности для управления и контроля за управляющими сигналами;
- невозможность работы в реальном масштабе времени вообще, поскольку данные о ресурсе формируются на достаточно большом интервале времени;
- невозможность распознать и, главное, отреагировать на возникновение нештатной ситуации.
Техническим результатом, ожидаемым от использования изобретения, является расширение функциональных возможностей блока безопасности, повышение достоверности формируемой им информации и надежности его работы, повышение надежности и безопасности транспортного средства, на котором установлен блок безопасности.
Указанный результат достигается тем, что в блоке безопасности, содержащем несущий конструктивный элемент, на котором расположены последовательно соединенные акселерометр и процессор, последний выполнен с дополнительными информационными входами для команд управления транспортным средством, ограничения параметров движения и текущих значений параметров движения, а также с выходом сигнализации и управляющим выходом.
Таким образом, существо предложения сводится к тому, что блок безопасности (системы управления поездом, например) решает задачу анализа соответствия текущего значения скорости ограничению, принимаемому с токоведущего кабеля, рельсового участка, радиоканала связи и т.п., и отрабатывает ситуацию несоответствия индикацией оператору (машинисту) и включением аварийного (или сначала штатного, а потом аварийного) торможения. Помимо этого блок решает задачу контроля соответствия различных команд управления парадигме безопасности (например, блокирует команду открывания дверей до остановки поезда и т.п.). Одновременно блок имеет в своем составе акселерометр, расположенный в отличие от других датчиков непосредственно на печатной плате основного процессора блока, минуя все промежуточные связи.
Акселерометр, будучи подключен к входу управляющего процессора блока безопасности и будучи размещен на одном несущем элементе конструкции с ним, решает несколько задач:
а) фиксирует правильно начавшееся экстренное (или иное) торможение и в случае его отсутствия и наличия соответствующего управляющего сигнала на выполнение команды торможения позволяет процессору принять решение о включении дополнительных систем (как экстренного торможения, так и индикации/оповещения);
б) выполняет антивандальную функцию - если блок безопасности в процессе работы подвергается аномальным ускорениям (например, ударам) по любым осям, в процессоре может быть запрограммирована самая различная реакция: от сообщения охране состава до аварийного снижения скорости;
в) по наличию нештатного удара (ускорения) детектирует факт аварии (столкновение с препятствием на пути следования, действие взрывного устройства и т.п.), позволяя процессору моментально предпринять необходимые действия (генерировать команды торможения и т.п.), поскольку при ускорениях выше некоего порогового значения, если блок сохранил работоспособность (о чем должны свидетельствовать текущие данные внутренней диагностики блока безопасности или процессора), то рассчитывать на управление со стороны оператора или машиниста некоторое время не приходится и все управление в первые секунды после удара должно определяться только автоматикой. Это «антитеррористическая» функция. Ее отличие от действия других систем (например, определяющих состояние или уровень бодрствования оператора и т.п.) - существенно большее быстродействие по детектированию опасной ситуации. Здесь наличие основного датчика - акселерометра в «сердце» системы безопасности служит гарантией его сохранности вместе с блоком безопасности, в то время как другие датчики (также, например, акселерометры диагностических систем тормозов, различные датчики скорости вращения и пр.), а главное, связи с ними в большинстве своем не выживают при жестких аварийных воздействиях.
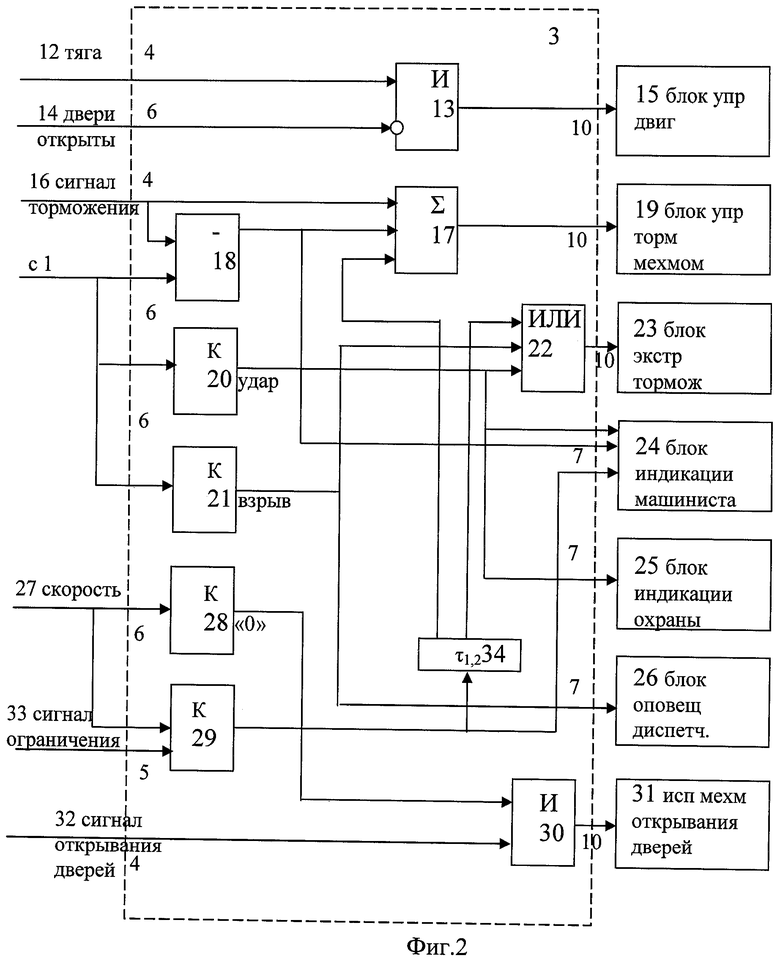
На фиг.1 приведена блок-схема предлагаемого устройства и показано, как оно связано с другими блоками транспортного средства. На фиг.2 приведен вариант выполнения процессора.
Устройство содержит акселерометр 1, выход которого соединен с информационным входом 2 процессора 3. Последний выполнен с дополнительными информационными входами для команд управления 4, ограничения параметров движения 5 и текущих значений параметров движения 6. Выход сигнализации 7 и управляющий выход 8 процессора 3 подключены к входам блока 9 индикации и исполнительным механизмам 10. Акселерометр 1 и процессор 3, образующие блок безопасности, размещены на одном несущем элементе конструкции 11 (на одной плате, в одном корпусе).
Процессор 3 может быть реализован как аппаратными, так и программными средствами. Простейший вариант его реализации аппаратными средствами представлен на фиг.2. На шину 12 поступает сигнал тяги. Шина 12 подключена к первому входу элемента И 13, второй, инвертирующий вход которой соединен с шиной 14, на которую подведен сигнал с выхода датчика, фиксирующего открытое состояние дверей. Выход элемента И 13 подключен к входу блока управления двигателем 15. Шина 12 соответствует, как обозначено на фиг.2, информационному входу для команд управления 4, шина 13 - информационному входу для текущих значений параметров движения 6 и т.д.
На шину 16 поступает сигнал торможения, она соединена с первыми входами сумматора 17 и блока 18 вычитания, второй вход которого соединен с выходом акселерометра 1, а выход - со вторым входом сумматора 17, выход которого соединен с входом блока 19 управления тормозным механизмом. Выход блока 18 вычитания соединен также со входом диагностики блока индикации 24 в кабине машиниста.
Сигнал с выхода акселерометра 1 поступает также на входы компараторов 20, 21. Выход компаратора 20 через элемент ИЛИ 22 соединен с входом блока 23 экстренного торможения, с входом блока индикации 24 в кабине машиниста, а также входом блока индикации 25 в помещении охраны. Выход компаратора 21 подключен ко второму входу элемента ИЛИ 22 и входу блока индикации 26 на диспетчерском пункте (например, по радиоканалу). Выход блока 18 вычитания соединен также со входом диагностики блока индикации 24 в кабине машиниста.
На шину 27 поступает информация о скорости состава (с выхода спидометра). Шина 27 подключена ко входам компараторов 28 и 29. Выход компаратора 28 соединен с первым входом элемента И 30, выход которого подключен ко входу исполнительного механизма открывания дверей 31. Второй вход элемента И 30 соединен с шиной 32 сигнала открывания дверей. Второй вход компаратора 29 подключен к шине 33 ограничения скорости состава. А выход компаратора 29 соединен со вторым входом блока индикации 24 в кабине машиниста и входом блока 34 задержки, выходы которого подключены к третьим входам сумматора 17 и элемента ИЛИ 22.
Все компараторы кроме компаратора 29 выполнены в виде пороговых блоков, т.е. сравнивают входной сигнал с пороговой величиной, заданной на их втором входе (на фиг.2 соответствующие цепи не показаны).
Собственно процессор 3 в примере, показанном на фиг.2, образован элементом И 13, сумматором 17, блоком 18 вычитания, компараторами 20, 21, 28 и 29, элементом ИЛИ 22, элементом И 30 и блоком 34 задержки. Блок 9 индикации образован блоками 24, 25 и 26. Исполнительный механизм 10 образован элементами 15, 16, 23 и 31.
Как отмечено выше, существо предложенного технического решения сводится к тому, что в блоке безопасности с акселерометром и процессором последний выполнен с дополнительными информационными входами для команд управления транспортным средством, ограничения параметров движения и текущих значений параметров движения, а также с выходом сигнализации и управляющим выходом.
Иными словами, процессор 3 не только выполнен с возможностью реализации обычных, штатных алгоритмов управления движением транспортного средства (двигателем и/или тормозной системой), открывания и закрывания дверей, ограничения скорости на данном участке пути в зависимости от сигнала, поступающего на его вход, но дополнен акселерометром 1 (который конструктивно выполнен с ним воедино) и выполнен с возможностью совместной логической обработки вышеупомянутых штатных сигналов и сигнала акселерометра 1, учета реального значения ускорения при разгоне и торможении, изменения штатного алгоритма при диагностировании удара по корпусу (несущему элементу конструкции 11) блока безопасности или иной нештатной ситуации. Это достигается тем, что на информационные входы 4-6 процессора 3 поступает как сигнал ускорения с выхода акселерометра 1, так и команды управления транспортным средством (вход 4 на фиг.1, 2), сигналы ограничения параметров движения (вход 5 процессора 3, например, максимально допустимая скорость на данном участке) и текущие значение параметров движения (например, скорость на входе 6, положение дверей и т.п.). При этом процессор 3 выполнен с возможностью реализации алгоритма совместной обработки указанных величин и принятия решения об оповещении тех или иных лиц и в ряде случаев перевода «на себя» управления движением.
В частности, процессор 3 может быть выполнен с возможностью реализации описанных выше алгоритмов по п.«а», «б» и «в».
Так, если на шине 14 присутствует сигнал «двери открыты», элемент И 13 блокирует прохождение сигнала тяги с шины 12 на вход блока управления двигателем 15. Данная функция относится к штатному режиму.
Блок 18 вычитания сопоставляет величину сигнала торможения на шине 16 с результирующим сигналом торможения, поступающим с выхода акселерометра 1. Величина полученной разности или несоответствия в качестве слагаемого (разумеется, с учетом знака) поступает на вход сумматора 17 и обеспечивает увеличение (снижение) управляющего воздействия на тормозную систему при ее недостаточной (избыточной) эффективности. Этот же сигнал рассогласования с выхода блока 18 вычитания подается на вход блока 24 индикации, и при достаточной его величине в блоке 24 срабатывает пороговое устройство и в кабине машиниста зажигается табло, свидетельствующее о неисправности тормозной системы состава.
Когда выходной сигнал акселерометра 1 достигнет следующей пороговой величины (а в более сложном случае будет зафиксировано периодическое импульсное воздействие значительной амплитуды в отсутствие сигнала торможения на шине 16), компаратор 20 выдаст сигнал, который через элемент ИЛИ 22 активизирует блок 23 экстренного торможения и оповестит не только машиниста, но и охрану состава о попытке взломать блок безопасности.
В случае аварийного столкновения или взрыва на пути следования состава срабатывает компаратор 21 и по цепи элемент ИЛИ 22 - блок 23 экстренного торможения проходит сигнал и состав тормозится. Одновременно блок 26 оповещения диспетчера по радиоканалу посылает соответствующее оповещение.
Компаратор 28 разрешает прохождение сигнала открывания дверей с шины 32 через элемент И 30 при скорости состава, близкой к нулевому значению. Если же на шине 27 сигнал скорости превышает значение скорости на шине 33 ограничения скорости состава, на выходе компаратора 29 появляется сигнал, поступающий на блок 24 индикации машиниста. Одновременно запускается блок 34 задержки, который формирует через интервал времени τ1 сигнал, поступающий через сумматор 17 на вход блока 19 управления тормозным механизмом. Если и после включения тормозного механизма в момент τ2 на выходе компаратора 29 сигнал присутствует, блок 34 задержки формирует сигнал, который через элемент ИЛИ 22 включает блок 23 экстренного торможения.
В результате обеспечивается расширение функциональных возможностей блока безопасности, повышение достоверности формируемой им информации и надежности его работы, повышение надежности и безопасности транспортного средства, на котором установлен такой блок безопасности. Это достигается за счет анализа соответствия текущего значения скорости ограничению, мгновенному выявлению других нештатных ситуаций и возможности быстро отреагировать на их возникновение индикацией оператору (машинисту) и включением аварийного (или сначала штатного, а потом аварийного) торможения. Помимо этого блок решает задачу контроля соответствия различных команд управления парадигме безопасности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕЗОПАСНОГО ТОРМОЖЕНИЯ | 2010 |
|
RU2432272C1 |
| Система управления маневровыми локомотивами | 2016 |
|
RU2622524C1 |
| БЛОК БЕЗОПАСНОСТИ С КОНТРОЛЕМ ДОСТОВЕРНОСТИ ВХОДНОЙ ИНФОРМАЦИИ | 2010 |
|
RU2439666C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| Система контроля поставленного на охрану объекта | 2020 |
|
RU2741380C1 |
| КРАН МАШИНИСТА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2329167C1 |
| Монорельсовая транспортная система | 2023 |
|
RU2826677C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО АВТОСТОПА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО ИЛИ ПУТЕВОГО СРЕДСТВА | 2010 |
|
RU2448005C1 |
Изобретение относится к области автоматики и может быть использовано на транспорте, прежде всего железнодорожном, в системах безопасности и управления. Управляющий блок безопасности транспортного средства содержит последовательно соединенные акселерометр и процессор. Процессор выполнен с возможностью формирования управляющих сигналов и сигналов индикации в экстренных ситуациях, для чего снабжен дополнительными информационными шинами для команд управления транспортным средством, ограничения параметров движения и текущих значений параметров движения, а также управляющим выходом сигнализации. Акселерометр жестко закреплен на основании процессора. Процессор выполнен с возможностью формирования сигналов индикации для машиниста, охраны и диспетчера, а выход сигнализации процессора выполнен в виде трех соответствующих сигнальных шин. Процессор выполнен с возможностью формирования сигналов, управляющих двигателем, тормозным механизмом и механизмом открывания дверей, а управляющий выход процессора выполнен в виде трех соответствующих шин управления. Процессор выполнен с возможностью формирования сигналов торможения и экстренного торможения, а соответствующая шина управления выполнена в виде шины управления тормозным механизмом и шины экстренного торможения. Процессор содержит блок вычитания, сумматора, четырех компараторов, двух элементов И, блок задержки и элемента ИЛИ. Достигается расширение функциональных возможностей блока безопасности, повышение достоверности формируемой им информации и надежности его работы, повышение надежности и безопасности транспортного средства, на котором установлен блок безопасности. 2 н. и 3 з.п. ф-лы, 2 ил.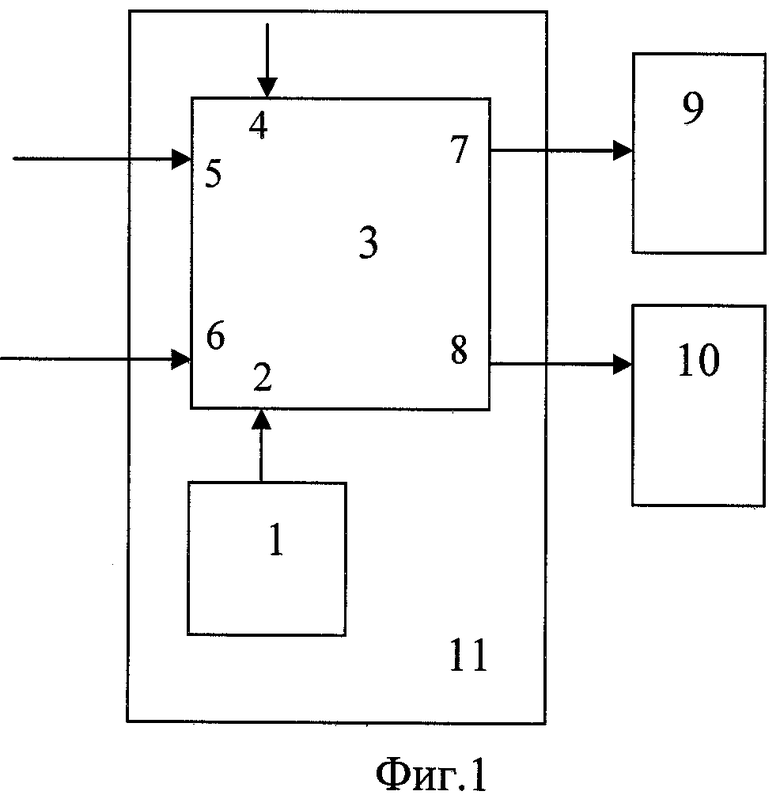
1. Управляющий блок безопасности транспортного средства, содержащий последовательно соединенные акселерометр и процессор, отличающийся тем, что последний выполнен с возможностью формирования управляющих сигналов и сигналов индикации в экстренных ситуациях, для чего снабжен дополнительными информационными шинами для команд управления транспортным средством, ограничения параметров движения и текущих значений параметров движения, а также управляющим выходом и выходом сигнализации, а акселерометр жестко закреплен на основании процессора.
2. Управляющий блок безопасности по п.1, отличающийся тем, что процессор выполнен с возможностью формирования сигналов индикации для машиниста, охраны и диспетчера, а выход сигнализации процессора выполнен в виде трех соответствующих сигнальных шин.
3. Управляющий блок безопасности по п.1, отличающийся тем, что процессор выполнен с возможностью формирования сигналов, управляющих двигателем, тормозным механизмом и механизмом открывания дверей, а управляющий выход процессора выполнен в виде трех соответствующих шин управления.
4. Управляющий блок безопасности по п.3, отличающийся тем, что процессор выполнен с возможностью формирования сигналов торможения и экстренного торможения, а соответствующая шина управления выполнена в виде шины управления тормозным механизмом и шины экстренного торможения.
5. Процессор управляющего блока безопасности по любому из пп.1-4, отличающийся тем, что он выполнен в виде блока вычитания, сумматора, четырех компараторов, двух элементов И, блока задержки и элемента ИЛИ, при этом информационная шина процессора для текущих значений параметров движения подключена к первому и второму входу первого элемента И, входу первого компаратора и первому входу второго компаратора с возможностью передачи сигнала тяги, информации о состоянии дверей и скорости транспортного средства соответственно, первый вход блока вычитания и входы третьего и четвертого компараторов объединены и подключены к входной шине ускорения, информационный вход процессора для ограничения параметров движения соединен со вторым входом второго компаратора, информационный вход процессора для команд управления транспортным средством подключен к объединенным первому входу сумматора и второму входу блока вычитания, а также к первому входу второго элемента И с возможностью передачи команд управления торможением и открыванием дверей соответственно, причем выход блока вычитания подключен ко второму входу сумматора и первой сигнальной шине индикации машиниста, выход первого компаратора соединен со вторым входом второго элемента И, выход которого образует шину управления тормозным механизмом, выход второго компаратора образует вторую сигнальную шину индикации машиниста и подключен к входу блока задержки, выходы которого соединены с третьим входом сумматора и первым входом элемента ИЛИ, второй вход которого подключен к выходу третьего компаратора, образующего также третью сигнальную шину индикации машиниста и шину индикации охраны, выход четвертого компаратора соединен с третьим входом элемента ИЛИ и сигнальной шиной индикации диспетчера, выход первого элемента И образует шину управления двигателем, выход сумматора образует шину управления тормозным механизмом, а выход элемента ИЛИ - шину экстренного торможения.
| РОТОР АСИНХРОННОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2010 |
|
RU2436220C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ВЫСОКОСКОРОСТНОГО ПОЕЗДА | 2003 |
|
RU2238208C1 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА ЖЕЛЕЗНОДОРОЖНЫМИ ВАГОНАМИ | 2005 |
|
RU2380261C2 |

