Изобретение относится к области управляющих систем и может быть использовано для автоматизированного управления движением и обеспечения безопасности движения пассажирского электропоезда, в частности метрополитена.
Разработка и создание новых систем управления с высокой степенью автоматизации направлены на уменьшение затрат по их техническому обслуживанию, повышение безопасности при эксплуатации, а также на уменьшение влияния человеческого фактора. Этому способствует внедрение резервированных систем с функциями самодиагностики и с применением соответствующих программно-аппаратных средств.
Известен бортовой информационно-управляющий комплекс высокоскоростного поезда по патенту №2238208, обладающий высокой отказоустойчивостью, в том числе, в условиях неработоспособности части источников навигационных данных и в условиях отсутствия расположенных на путях источников данных о местонахождении поезда (напольных устройств). Комплекс содержит четыре информационно-управляющие системы, каждая из которых содержит антенну спутниковой навигационной системы, приемник спутниковой навигационной системы, бортовую цифровую вычислительную машину, первое долговременное запоминающее устройство, трехосный акселерометр, адаптер последовательных интерфейсов, адаптер магистральных каналов информационного обмена, блок ввода-вывода, системную интерфейсную магистраль, устройство контроля исправности системы, реле отключения магистрального канала информационного обмена с системой управления движением. Изобретение обеспечивает различные режимы управления поездом, в том числе - автоведения, и безопасность движения поезда.
Однако этот комплекс обладает значительной избыточностью.
Известна система управления движением электропоезда по патенту №2213669, которая предназначена для автоматизации управления движением электропоезда. Система содержит датчик пути и скорости, блок определения скорости, пульт управления, вычислительный блок, блок индикации, блок памяти, блоки управления режимом тяги и торможения, блоки сопряжения, блок управления и другие. Устройство обеспечивает автоматизированное управление движением электропоезда, включая пуск и разгон, с выбором режима ведения поезда, в зависимости от сигналов, требующих снижения скорости (желтый, красно-желтый, красный).
Недостатками известной системы являются: управление двигателями по цепям управления электропоезда, а также недостаточная степень обеспечения безопасности движения поезда.
Известно комплексное локомотивное устройство безопасности, унифицированное по патенту №2248899, и устройство контроля за управлением локомотивом и бдительностью машиниста по патенту №2262459, которые представляют собой открытые системы реального времени с модульной архитектурой, блоки которых соединены кабелем системного CAN-интерфейса, ответственные блоки имеют двухканальное исполнение.
Недостатком вышеназванных устройств является недостаточная степень обеспечения безопасности в условиях метрополитена. Аппаратура поездов метрополитена должна обеспечивать движение поезда с заданной скоростью на каждом участке пути, остановку поезда на станции с необходимой точностью, особенно на платформах закрытого типа, а также открытие и закрытие дверей на станции с заданной стороны (правой или левой).
Наиболее близким по своей технической сущности аналогом, взятым в качестве прототипа заявляемого изобретения, является система управления движением электроподвижного состава, патент №2249525, которая содержит два контура управления - автоматический и ручной. Автоматический контур включает в себя два бортовых контроллера, первое устройство отображения информации, датчики скорости движения, датчики положения, последовательные интерфейсы, контроллеры двигателей. В ручной контур входят панель управления с управляющими выходами, последовательный интерфейс и второе устройство отображения информации. Система обеспечивает централизованное высокоточное графико-интервальное регулирование движения поездов и повышенную безопасность перевозок пассажиров. Управляющие сигналы на тяговый привод по последовательному интерфейсу поступают в контроллеры двигателей, что обеспечивает гибкое и экономичное управление тягой и торможением.
Недостатком изобретения является невозможность использования для электропоездов метрополитена, так как недостаточна степень обеспечения безопасности движения поезда в условиях метрополитена, отсутствует система по обеспечению недопустимости опасного отказа, в частности, по превышению допустимой скорости и открытию дверей.
В соответствии с основным принципом безопасности железнодорожной автоматики и телемеханики одиночный отказ не должен приводить систему к опасному отказу, то есть к событию, заключающемуся в нарушении работоспособности и защитного состояния системы.
Таким образом, для обеспечения безопасности эксплуатации система должна непрерывно сохранять исправное, работоспособное состояние, или при угрозе опасного отказа система должна переходить в защитное состояние - неработоспособное состояние системы, при котором значения всех параметров, характеризующих способность выполнять заданные функции по обеспечению безопасности движения поездов, соответствуют требованиям нормативно-технической и конструкторской документации.
Опасным отказом поездной аппаратуры, в соответствии с «Правилами технической эксплуатации метрополитенов Российской Федерации», считается отказ, в результате которого может произойти любое из событий:
1) Неконтролируемое превышение допустимой скорости - движение со скоростью, превышающей допустимую скорость (включая несанкционированное движение при нулевой допустимой скорости или при отсутствии кодирования в рельсовых цепях).
2) Отсутствие эффективного торможения - возможность превышения тормозного пути при неэффективном электрическом торможении.
3) Несанкционированное открытие дверей - возможность открытия дверей поезда при отсутствии хотя бы одного из условий, разрешающих их открытие.
а) полная остановка поезда.
б) нахождение поезда на станции в зоне остановки первого вагона.
в) разрешенная сторона открытия дверей.
Технической задачей изобретения является повышение уровня безопасности перевозок пассажиров и расширение функциональных возможностей: обеспечение выдачи команд на системы управления вагонов и безопасной выдачи команд на открытие дверей одного или нескольких вагонов; исключение накопления отказов; а также обеспечение контроля и диагностики исполнительных устройств, что позволяет повысить уровень технического обслуживания.
Для решения задачи предлагается система управления движением электроподвижного состава, содержащая: датчики 1.1...1.k скорости и пути (k - количество датчиков, размещенных в головном/хвостовом вагоне), блок 3 терминала машиниста, контроллеры 4.f(f=1...m, m - число моторных вагонов в составе) двигателей 5, два бортовых компьютера 6, 7 и два последовательных интерфейса 8, 9, отличающаяся тем, что в нее дополнительно введены, катушки 2.1 и 2.2 индуктивного канала, датчики 10.1...10.j (j - количество датчиков, размещенных в головном/хвостовом вагоне) коррекции пути, антенна 11, блок 12 радиосвязи, два блока 13, 14 релейной коммутации, блок 15 управления электропневмоклапаном 16, блок 17 связи, кроме того, по числу вагонов введены блоки 18.i (i=1...n, n - число вагонов в электроподвижном составе) релейной коммутации вагонов и блоки 19.i вагонных контроллеров, а также дополнительные связи, при этом датчики 1.1...1.k пути и скорости, катушки 2.1 и 2.2 индуктивного канала, датчики 10.1...10.j коррекции пути, подключены к блоку 17 связи, при этом первый последовательный интерфейс 8 подключает его, а также блок 12 радиосвязи и блок 3 терминала машиниста к первым входам/выходам первого и второго бортовых компьютеров 6 и 7, первыми группами выходов оба бортовых компьютера связаны с блоком 15 управления элекропневмоклапаном 16, вторая группа выходов первого бортового компьютера 6 является первой группой входов второго бортового компьютера 7, вторая группа выходов которого является первой группой входов первого бортового компьютера 6, третья группа выходов первого бортового компьютера 6 подключена к первой группе входов первого блока 13 релейной коммутации, вторая группа выходов которого подключена ко второй группе входов второго блока 14 релейной коммутации, первая группа выходов которого подключена ко второй группе входов второго бортового компьютера 7 и к третьей группе входов первого бортового компьютера 6, в свою очередь первый бортовой компьютер 6 второй группой входов подключен к первой группе выходов первого блока 13 релейной коммутации и к третьей группе входов второго бортового компьютера 7, третья группа выходов которого подключена к первой группе входов второго блока 14 релейной коммутации, вторая группа выходов которого подключена к поездным проводам 24 и ко всем вторым группам входов блоков 18.i релейной коммутации всех вагонов, а третий выход подключен посредством поездного провода 25 к выходу блока 3 терминала машиниста и ко вторым входам схем 20.1 цепей управления дверями всех вагонов; вторые входы/выходы первого и второго бортовых компьютеров 6 и 7 подключены, посредством второго последовательного интерфейса 9, к первым входам/выходам всех блоков 19.i вагонных контроллеров, которые своими вторыми входами/выходами связаны с соответствующими контроллерами 4.f двигателей, подключенных к двигателям 5, а своей первой группой выходов - с первыми группами входов соответствующих блоков 18.i релейной коммутации вагонов, подключенных первыми группами выходов к первым группам входов соответствующих блоков 19.i вагонных контроллеров, которые своими вторыми группами входов подключены к первым группам выходов схем 20.i цепей управления дверями соответствующих вагонов, а своими третьими группами входов подключены к первым группам выходов схем 21.i цепей управления соответствующих вагонов, вторые группы выходов которых связаны со схемами 22 управления пневмотормозами и блокировками двигателей вагона, группы входов схем 21.i цепей управления вагонов подключены ко вторым группам выходов блоков 18.i релейной коммутации вагонов, третьи группы выходов которых подключены к первым группам входов схем 20.i цепей управления дверями соответствующих вагонов, вторые группы выходов которых связаны с дверными воздухораспределителями 23, а четвертый вход вагонных контроллеров 19.i связан с группой 26 вагонных проводов.
Сущность изобретения поясняется чертежами:
фиг.1 - структурная схема системы управления движением электроподвижного состава (в дальнейшем система управления);
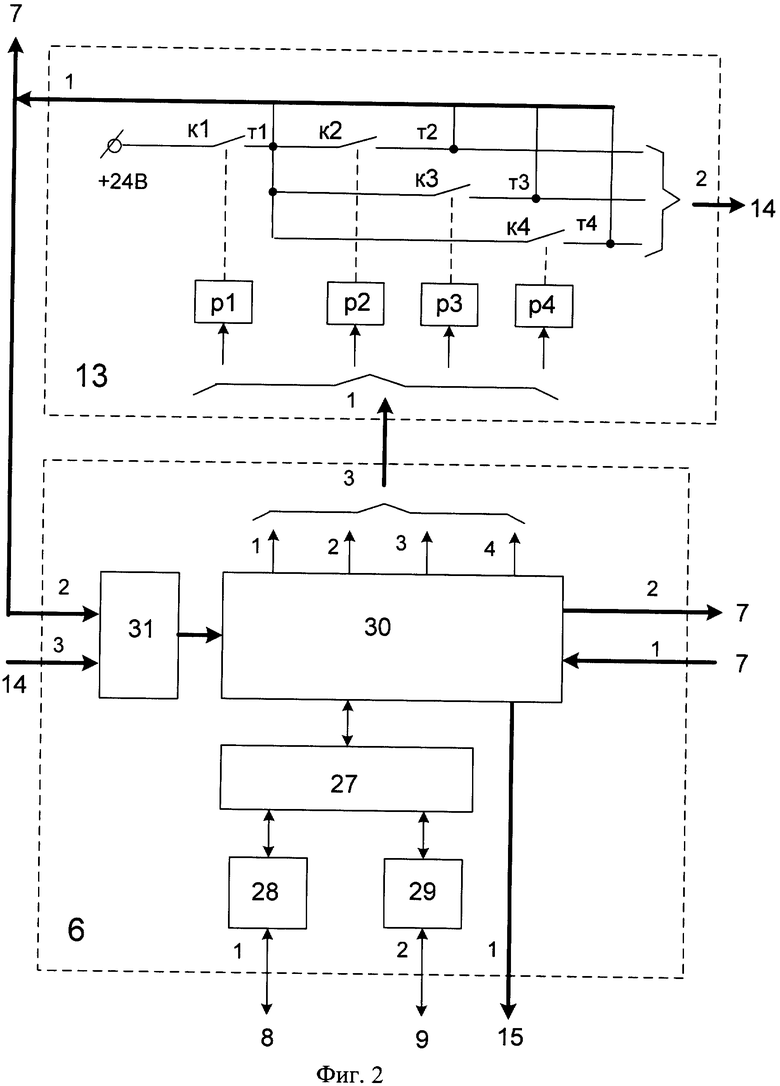
фиг.2 - структурная схема бортового компьютера и первого блока релейной коммутации;
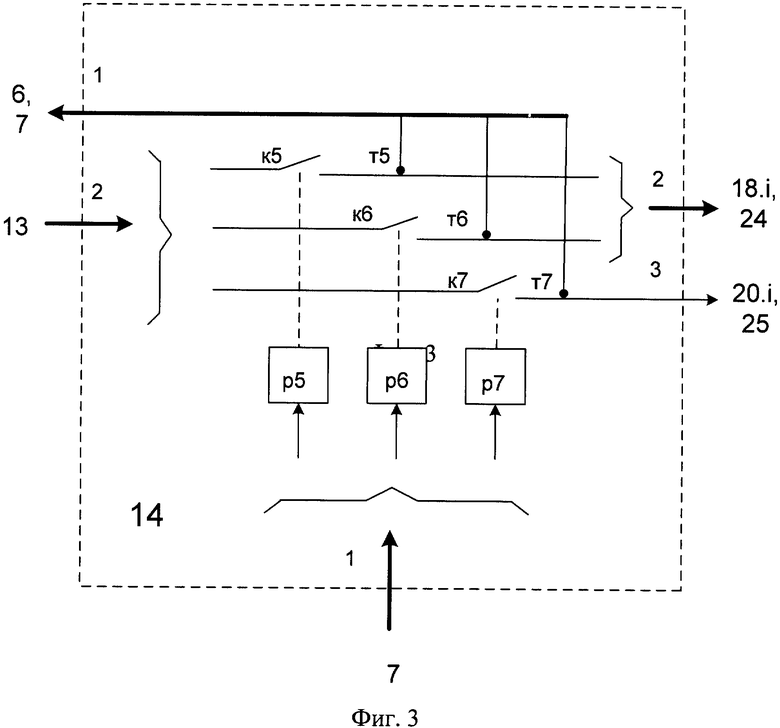
фиг.3 - структурная схема второго блока релейной коммутации;
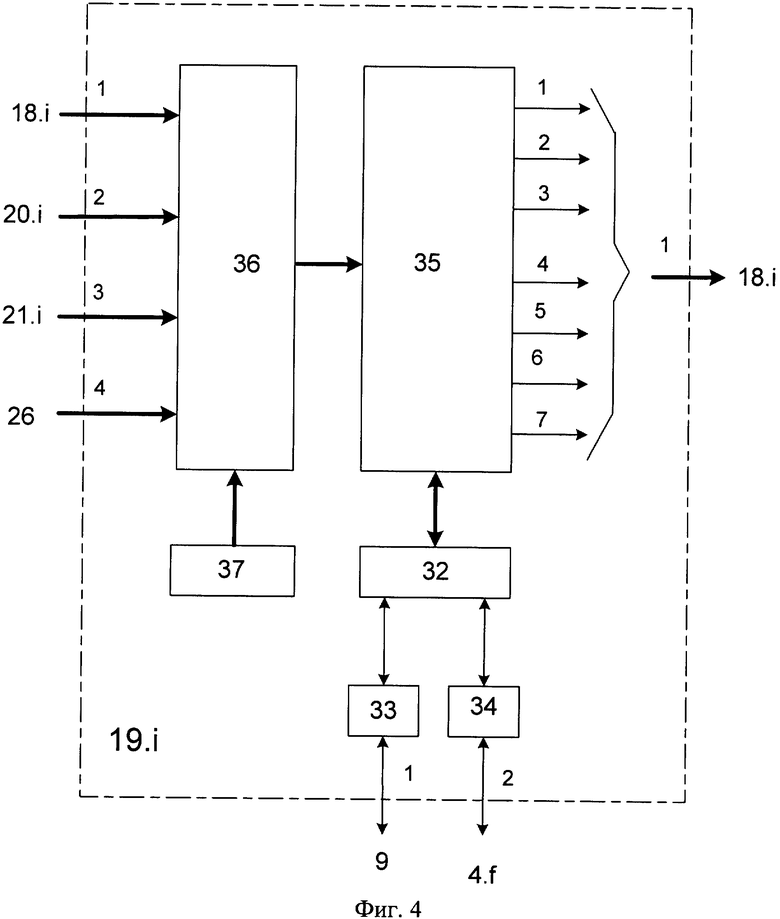
фиг.4 - структурная схема блока вагонного контроллера;
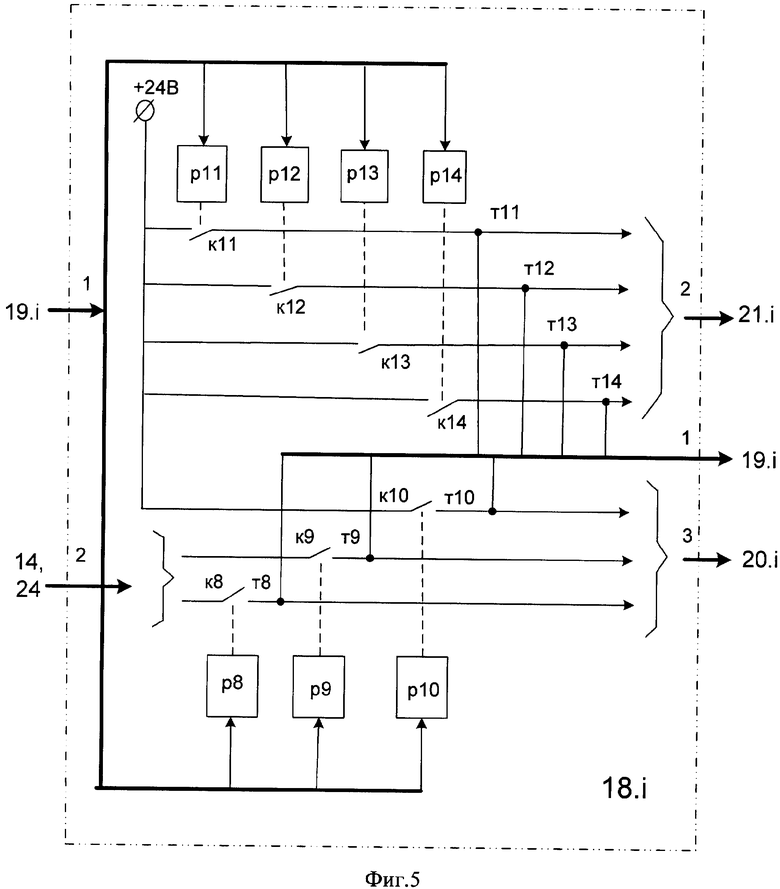
фиг.5 - структурная схема блока релейной коммутации вагона;
фиг.6 - структурная схема схемы цепей управления дверями;
фиг.7 - структурная схема схемы цепей управления вагонов.
На чертежах обозначены:
1.1...1.k - датчики скорости и пути, где k - количество датчиков, размещенных в головном (хвостовом) вагоне;
2.1, 2.2 - катушки индуктивного канала;
3 - блок терминала машиниста;
4.f - контроллер двигателей, где f=1...m, m - число моторных вагонов в составе;
5 - двигатели;
6 - первый бортовой компьютер;
7 - второй бортовой компьютер;
8 - первый последовательный интерфейс;
9 - второй последовательный интерфейс;
10.1...10.j - датчики коррекции пути, где j - количество датчиков, размещенных в головном (хвостовом) вагоне;
11 - антенна цифрового радиоканала;
12 - блок радиосвязи;
13 - первый блок релейной коммутации;
14 - второй блок релейной коммутации;
15 - блок управления элекропневмоклапаном;
16 - электропневмоклапан (ЭПК);
17 - блок связи;
18.i - блок релейной коммутации вагона, где i=1...n, n - число вагонов в электроподвижном составе;
19.i - блок вагонного контроллера, где i=1...n, n - число вагонов в электроподвижном составе;
20.i - схема цепей управления дверями, где i=1...n, n - число вагонов в электроподвижном составе;
21.i - схема цепей управления вагона, где i=1...n, n - число вагонов в электроподвижном составе;
22 - управление пневмотормозами и блокировками двигателей;
23 - управление дверными воздухораспределителями;
24 - группа поездных проводов;
25 - поездной провод;
26 - группа вагонных проводов;
27 - процессорный блок бортового компьютера;
28 - первый блок обмена бортового компьютера;
29 - второй блок обмена бортового компьютера;
30 - блок ввода/вывода бортового компьютера;
31 - блок ввода;
32 - процессорный блок блока вагонного контроллера;
33 - первый блок обмена блока вагонного контроллера;
34 - второй блок обмена блока вагонного контроллера;
35 - блок ввода/вывода;
36 - блок ввода;
37 - адресная заглушка;
р1-р21 - реле;
к1-к21 - ключи;
т1-т21 - точки подключения.
На фиг.1 представлены:
1.1...1.k - датчики скорости и пути; каждый датчик осуществляет измерение фактической скорости и пройденного пути, а также определение направления движения поезда.
В качестве датчиков скорости используются индукционные реверсивные датчики, которые устанавливаются в смотровых люках редукторов колесных пар головного и хвостового вагонов поезда. Датчики скорости формируют последовательность импульсов, частота которых пропорциональна скорости вращения колесной пары, а соответственно и скорости движения поезда. Каждый импульс свидетельствует о прохождении одного зуба шестерни редуктора через чувствительный элемент и соответствует прохождению поездом трех сантиметров пути. Последовательность импульсов поступает на гальванически развязанный вход контроллера блока связи. Кроме сигналов, соответствующих фактической скорости, формируется сигнал, определяющий направление движения поезда. Фактическая скорость и направление движения поезда позволяют иметь информацию о пройденном пути - «координату» поезда.
2.1, 2.2 - две катушки индуктивного канала, входящие в состав вагонного оборудования головных/хвостовых вагонов, предназначены для приема из рельсовой линии кодовых сигналов автоматического регулирования скорости АРС, соответствующих допустимым скоростям движения. (Информация о допустимой скорости кодируется на станции и передается по рельсовым цепям напряжением переменного тока определенной частоты в диапазоне от 75 до 275 Гц; скорость км/час: - 80, 70, 60, 40 и 0. Может быть организован прием сигналов фазоразностной модуляции).
3 - блок терминала машиниста, предназначен для приема команд управления движением поезда от машиниста и передачи их в первый бортовой компьютер 6 и второй бортовой компьютер 7, а также для визуального контроля параметров движения и технического состояния системы, что позволяет контролировать и управлять техническими средствами поезда во всех его эксплуатационных режимах. Блок терминала машиниста включает блок индикации (дисплей) с процессором и клавиатурой. Разрешение на допуск машиниста к работе производится по магнитному авторизатору доступа или по паролю (код доступа), вводимому с клавиатуры блока терминала машиниста.
4.f - контроллер двигателей, предназначен для формирования управляющих сигналов для двигателей 5 тягового электропривода (в прицепных вагонах контроллеры 4.f двигателей отсутствуют). Каждый контроллер тягового привода с помощью CAN-интерфейса связан с блоком вагонного контроллера 19.i, который выдает на него команды управления.
5 - двигатели, в количестве четырех, входят в комплект асинхронного тягового привода;
Электрооборудование тяговых и вспомогательных приводов установлено в контейнере, подвешенном под рамой кузова между тележками каждого моторного вагона. Контейнер оснащен тяговым оборудованием для четырех асинхронных двигателей и содержит инверторы для вспомогательных приводов. В контейнере также установлено зарядное устройство аккумуляторной батареи.
6 - первый бортовой компьютер (фиг.2) предназначен для приема и обработки информации от датчиков, блока радиосвязи, блока терминала машиниста, контроллеров двигателей и сигналов контроля от систем поезда, реализации функциональной программы системы управления движением электроподвижного состава по обеспечению заданных режимов ведения поезда (управление тягой и торможением), формирования команд управления дверями в блоки релейной коммутации и в блоки вагонных контроллеров, а также на блок управления элекропневмоклапаном; является мастером CAN-коммуникации на первом последовательном интерфейсе 8 и втором последовательном интерфейсе 9. Первый бортовой компьютер 6 является ведущим при выдаче управляющих команд в блоки 19.i вагонных контроллеров.
7 - второй бортовой компьютер выполняет те же функции, что и первый бортовой компьютер 6 по приему и обработке информации, а также по реализации функциональной программы, но выдачи управляющих команд в контроллеры 4 двигателей он не производит, осуществляя функцию контроля. Второй бортовой компьютер 7 является ведомым. В память обоих бортовых компьютеров введена база данных, содержащая всю информацию о маршрутах движения, параметрах линий, стоянках (станциях, тупиках, депо), перегонах с учетом: профиля участков движения, скоростных характеристик движения, мест расположения рефлекторов и т.п. База данных содержит расчетные значения коэффициентов тяги для расчета на борту скорости отключения и подключения тяги для каждого перегона с учетом минимизации расхода энергии. Эти сведения позволяют осуществлять все режимы ведения состава, включая автоведение. Кроме того, в базе данных может храниться информация по идентификации пользователей с учетом персональных прав доступа.
8 - первый последовательный интерфейс, обеспечивает в CAN-стандарте прием информации от датчиков 1.1...1.k скорости и пути, от катушек 2.1 и 2.2 индуктивного канала и от датчиков 10.1...10.j коррекции пути, через блок 17 связи, а также обмен информацией с блоком 12 радиосвязи и блоком 3 терминала машиниста. Первый последовательный интерфейс 8, как и двухсторонние связи с блоком 3 терминала машиниста, блоком 12 радиосвязи и блоком 17 связи, могут быть резервированы (как в прототипе) для обеспечения индикации параметров движения на резервном индикаторе блока 3 терминала машиниста.
9 - второй последовательный интерфейс, обеспечивает связь и обмен в CAN-стандарте первого и второго бортовых компьютеров 6 и 7 с блоками 19 вагонных контроллеров всех вагонов, начиная с первого (головного) до n-го (хвостового) вагона.
10.1...10.j - датчики коррекции пути, предназначены для фиксации сигнала от контрольной метки с известными координатами, установленной в тоннеле по пути следования поезда, формирования сигналов, обеспечивающих коррекцию значений координат местоположения поезда на перегоне и уточнение значений диаметра бандажа колесной пары, связанной с датчиками скорости. Так как вычисленное по данным датчиков 1.1...1.k скорости и пути значение пройденного пути зависит от диаметра бандажа колесной пары, связанной с датчиками 1.1...1.k скорости и пути, а погрешность вычисления возрастает с увеличением времени измерения, в системе для повышения точности прицельного торможения производится коррекция значений пройденного пути и диаметра бандажа колесной пары. Датчики 10.1...10.j коррекции пути представляет собой приемопередатчики сигналов в инфракрасном (ИК) диапазоне частот и работают совместно с пассивными отражателями ИК-сигналов (рефлекторами - катафотами), установленными на перегонах в фиксированных местах с известными координатами двух точек с фиксированным расстоянием (например, мерный участок 100 м). При прохождении поездом контрольной точки, с установленным рефлектором, датчиками 10.1...10.j коррекци пути по наличию отражения формируются потенциальные сигналы, которые поступают на гальванически развязанные входы блока 17 связи головного вагона. В блоке 17 связи определяются координаты установки первого и второго рефлекторов, значения которых поступают в бортовые компьютеры 6 и 7. Запрос на измерение бандажа колесной пары с указанием ее номера может быть введен из головной кабины и производится на мерных перегонах независимо от скорости поезда.
11 - антенна цифрового радиоканала, представляет собой антенно-фидерное устройство, расположенное на крыше поезда в головном/хвостовом вагоне. Совместно с блоком 12 радиосвязи обеспечивает связь по эфиру со стационарной аппаратурой на станциях.
12 - блок радиосвязи, размещенный в головном/хвостовом вагоне, предназначен для обмена между станцией и поездом; обеспечивает независимый дополнительный канал получения информации о допустимой скорости (повышение безопасности) и разрешения на открытие дверей для обеспечения режима автоведения. В состав информации от станции входит: идентификатор станции, идентификатор станции оборота, допустимая скорость, код положения поезда, разрешение режима работы от станционной аппаратуры, номер графикового маршрута, номер поезда, номер пути, время отправления, Московское время, время в пути. В состав информации от поезда входит: идентификатор поезда, номер сообщения, диагностика поезда, длина поезда в вагонах, положение головы поезда, номер перегона, фактическая скорость поезда, табельный номер машиниста, код фактического режима работы системы управления движением электроподвижного состава, номер графикового маршрута.
13 - первый блок релейной коммутации (фиг.2), связанный с первым и вторым бортовыми компьютерами 6 и 7, а также со вторым блоком 14 релейной коммутации; предназначен для выдачи команд управления дверями, полученных от первого бортового компьютера 6.
14 - второй блок релейной коммутации (фиг.3), связанный с первым и вторым бортовыми компьютерами 6 и 7, а также с первым блоком 13 релейной коммутации и поездными проводами 24, подключен к блокам 18 релейной коммутации всех вагонов; предназначен для выдачи команд управления дверями, полученных от второго бортового компьютера 6 на поездные провода 24.
15 - блок управления элекропневмоклапаном, который предназначен для управления электропневмоклапаном 16 экстренного торможения; схемотехническая реализация блока 15 управления основана на «безопасном» принципе, заключающемся в том, что при любом нарушении соответствия сигналов, формируемых первым и вторым бортовыми компьютерами 6 и 7, схема переходит в «безопасное» (выключенное) состояние, что переводит выходной усилитель в выключенное состояние - снимается питание с электропневмоклапана 16 поезда и состав переводится в режим торможения. В блоке 15 управления электропневмоклапаном сигнал преобразовывается в сигнал постоянного напряжения и поступает на электропневмоклапан 16.
16 - электропневмоклапан (ЭПК) предназначен для экстренного торможения и является основным средством безопасности, установлен в головных/хвостовых вагонах поезда.
17 - блок связи, предназначен для приема, обработки и передачи в первый и второй бортовые компьютеры 6 и 7 информации о фактической скорости движения и местоположении поезда от датчиков 1.1...1.k скорости и пути, и от датчиков 10.1...10.j коррекции пути, информации о допустимой скорости движения поезда, поступающей с приемных катушек МПК, их гальванической развязке, фильтрации, дешифрации и преобразования в цифровую форму. Вся информация формируется в пакеты и передается через CAN-порты по первому последовательному интерфейсу 8 в первый и второй бортовые компьютеры 6 и 7.
Блок 17 связи обеспечивает также выдачу сигнала, по команде от ведущего бортового компьютера 6, на включение инфракрасного излучения датчиков 10.1...10.j коррекции пути.
18.i - блок релейной коммутации вагона (фиг.5), предназначен для выдачи команд, полученных от блока 19.i вагонного контроллера на схему 20.i цепей управления дверями и на схему 21.i цепей управления вагоном, а также для передачи сигналов обратного контроля в блок 19.i вагонного контроллера.
19.i - блок вагонного контроллера (фиг.4), предназначен для приема от ведущего бортового компьютера 6 команд управления двигателями, дверями и пневматическими устройствами, их обработки и выдачи в блок 18.i релейной коммутации вагона и выдачи команд в контроллер 4.f двигателей (моторных вагонов), а также приема от контроллера 4.f двигателей диагностической и служебной информации. Кроме того, блок 19.i вагонного контроллера осуществляет передачу в бортовые компьютеры 6 и 7 информации о состоянии аппаратуры вагона, исполнительных устройств и необходимую диагностическую информацию.
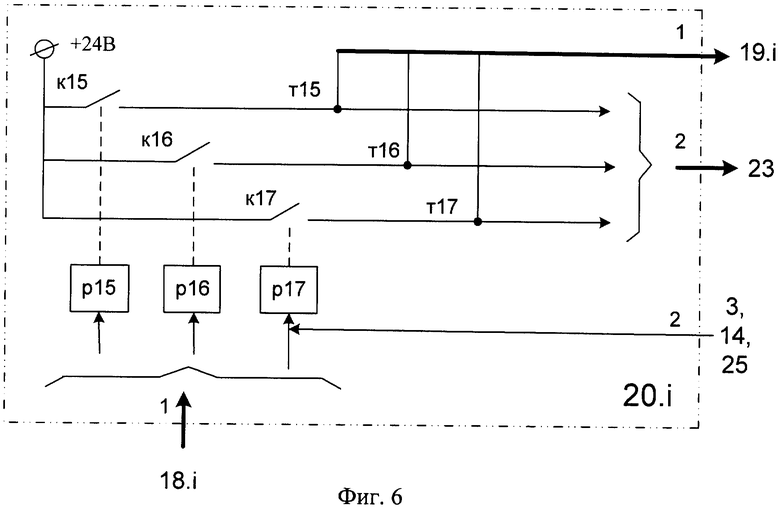
20.i - схема цепей управления дверями (фиг.6), в систему управления движением электроподвижного состава не входит. Отражает организацию системы контроля и диагностики.
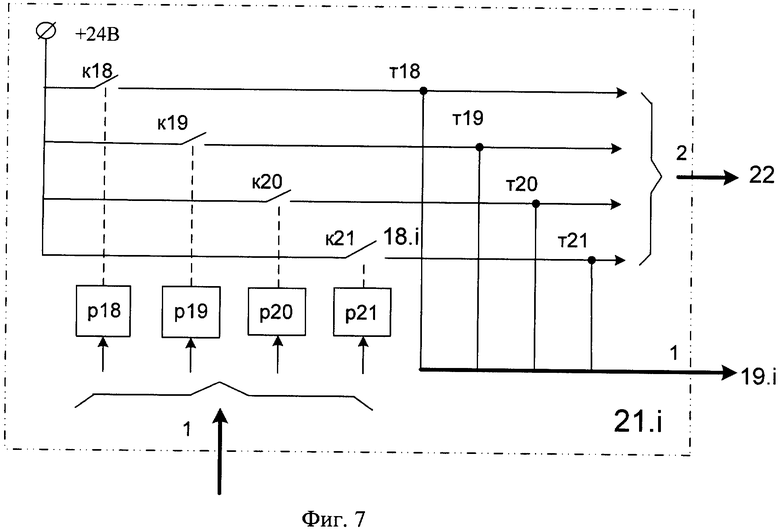
21.i - схема цепей управления вагона (фиг.7), в систему управления движением электроподвижного состава не входит. Отражает организацию системы контроля и диагностики.
22 - управление пневмотормозами и блокировками двигателей.
23 - управление дверными воздухораспределителями.
24 - группа поездных проводов.
25 - поездной провод.
26 - группа вагонных проводов, связанных с оборудованием электропоезда.
Датчики 1.1...1.k пути и скорости, катушки 2.1 и 2.2 индуктивного канала, датчики 10.1...10.j коррекции пути, блок 3 терминала машиниста, первый бортовой компьютер 6, второй бортовой компьютер 7, блок 12 радиосвязи, блок 17 связи, связанные первым последовательным интерфейсом 8, антенна 11, блок 15 управления электропневмоклапаном, а также первый блок 13 релейной коммутации, второй блок 14 релейной коммутации, блок 18.i релейной коммутации вагона, блок 19.i вагонного контроллера, контроллер 4.f двигателей расположены как в головном вагоне (показано на фиг.1), так и в хвостовом, и связаны посредством второго последовательного интерфейса 9 с соответствующими блоками хвостового и промежуточных вагонов. При этом вагоны являются головным или хвостовым в зависимости от направления движения поезда.
На фиг.2 представлена структурная схема первого бортового компьютера 6 и первого блока 13 релейной коммутации. Первый бортовой компьютер 6 имеет в своем составе процессорный блок 27 с двумя блоками обмена 28 и 29 (CAN-порты), посредством которых он подключен к первому последовательному интерфейсу 8 и ко второму последовательному интерфейсу 9. Процессорный блок 27 через двусторонние входы/выходы подключен к блоку 30 ввода/вывода, который первой группой выходов (два сигнала) подключен к блоку 15 управления ЭПК, а второй группой выходов связан с первой группой входов второго бортового компьютера 7. К первой группе входов первого бортового компьютера 6 (непосредственно к блоку 30 ввода/вывода) подключены вторая группа выходов второго бортового компьютера 7, а третья группа выходов первого бортового компьютера 6, посредством блока 30 ввода/вывода, подключена к первой группе входов первого блока 13 релейной коммутации. На третью группу входов первого бортового компьютера 6 поступают сигналы от первой группы выходов второго блока 14 релейной коммутации. Третья группа выходов первого бортового компьютера 6 включает четыре сигнала, поступающих на первую группу входов блока 13 релейной коммутации - на реле: р1, р2, р3 и р4. Замыканием ключей (выдача команд осуществляется коммутацией напряжения аккумуляторной батареи +24 В) формируются следующие команды:
к1 - команда подачи бортового напряжения +24 В от аккумуляторной батареи;
к2 - команда открытия левых дверей (ОДЛ);
к3 - команда открытия правых дверей (ОДП);
к4 - команда закрытия дверей (ЗД).
Одновременно с выдачей команд на блок 13 релейной коммутации эти команды подаются на первую группу входов второго бортового компьютера 7 для контроля.
Выходы ключей к2, к3 и к4 образуют вторую группу выходов блока 13 релейной коммутации, связанную со второй группой входов второго блока 14 релейной коммутации (фиг.3).
Для возможности проверки состояния ключей (выявление ложного замыкания) и проверки их срабатывания, после каждого ключа введены связи для обратного контроля (контрольные точки т1, т2, т3 и т4), представляющие первую группу выходов первого блока 13 релейной коммутации, которая подключена ко второй группе входов первого бортового компьютер 6 и к третьей группе входов второго бортового компьютера 7. Эти входы подключены к блоку 31 ввода, который группой выходов подключен к блоку 30 ввода/вывода. Первый и второй бортовые компьютеры 6 и 7 имеют одинаковую структуру, исполнение и аналогичные связи.
На фиг.3 представлена структурная схема второго блока 14 релейной коммутации, на первую группу входов которого от третьей группы выходов второго бортового компьютера 7 на реле поступают три команды: р5 - ОДЛ, р6 - ОДП и р7 - ЗД, в свою очередь, со второй группы выходов первого блока 13 релейной коммутации поступают сигналы на вторую группу входов блока 14 релейной коммутации, которые подключением питания на ключи к5, к6 и к7 разрешают прохождение команд, поданных на блок 14 релейной коммутации от второго бортового компьютера 7, и образуют вторую группу выходов, подключенную к поездным проводам 24 и ко вторым группам входов блоков 18.i релейной коммутации всех вагонов. Третий выход подключен к выходу блока 3 терминала машиниста и ко вторым входам схем 20.i цепей управления дверями всех вагонов посредством поездного провода 25. Также, как и в первом блоке 13 релейной коммутации, для возможности проверки состояния ключей (выявления ложного замыкания) и проверки их срабатывания, после каждого ключа k5, k6, k7 введены связи для обратного контроля (контрольные точки т5, т6 и т7), представляющие первую группу выходов второго блока 14 релейной коммутации, которая подключена ко второй группе входов второго бортового компьютера 7 и к третьей группе входов первого бортового компьютера 6.
На фиг.4 представлена структурная схема одного из блоков 19.i вагонного контроллера (моторного вагона), который имеет в своем составе процессорный блок 32 с двумя блоками обмена 33 и 34, посредством которых он подключен ко второму последовательному интерфейсу 9 и к контроллеру 4.f двигателей (в моторных вагонах) соответственно. Процессорный блок 32 через двусторонние входы/выходы подключен к блоку 35 ввода/вывода, который первой группой выходов подключен к первой группе входов блока 18.i релейной коммутации вагона.
Эта группа выходов служит для передачи следующих команд:
1 - «открытие дверей левых» (ОДЛ);
2 - «открытие дверей правых» (ОДП);
3 - «закрытие дверей» (ЗД);
4 - команда включения электропневматического вентиля В1;
5 - команда включения электропневматического вентиля В2;
6 - команда отключения BLJ тягового привода (отключается весь контейнер);
7 - команда блокировки BLK тягового привода (отключается только привод).
На первую, вторую, третью и четвертые группы входов блоков 19.i вагонных контроллеров посредством блока 36 ввода подключены группы входных сигналов обратного контроля (фиг.5, фиг.6, фиг.7):
1 - от блоков 18.i релейной коммутации вагона;
2 - от схемы 20.i цепей управления дверями схемы;
3 - от схемы 21.i цепей управления вагона.
Кроме того, от группы вагонных проводов 26, связанных с оборудованием электропоезда, на четвертую группу входов блока 36 ввода поступают следующие сигналы:
СДЭ - сигнализатор наличия давления в системе ЭПК (только в головном вагоне);
АВТ - автоматический выключатель торможения, при включенном состоянии происходит отмена торможения в том вагоне, от которого он поступил;
АВУ - автоматический выключатель управления (только в головном вагоне), при наличии сигнала происходит отмена ходового режима во всех вагонах;
СОТ - сигнал отпуска тормозов (контроль состояния тормозных колодок);
КД - сигнал контроля закрытия дверей.
Эти сигналы свидетельствуют о выполнении команд управления, отражают состояние исполнительных устройств и учитываются первым, а также вторым бортовыми компьютерами 6, 7 в функциональных программах.
Для идентификации по номеру вагона и ориентации (направлению тяги двигателей) ко входу блока 36 ввода подключена адресная заглушка 37 блока 19.i вагонного контроллера.
На фиг.5 представлена структурная схема блока 18.i релейной коммутации вагона, на первую группу входов которого с первой группы выходов блока 19.i вагонного контроллера поступают семь сигналов (на реле р8-р14), представляющих команды управления:
p8 - ОДЛ;
p9 - ОДП;
p10 - ЗД;
p11 - B1;
р12 - В2;
р13 - BLJ;
р14 - BLK.
На вторую группу входов блока 18.i релейной коммутации вагона, подключенную посредством поездных проводов 24 ко второй группе выходов блока 14 релейной коммутации, поступают на ключи к8 и к9 два сигнала, представляющие команды управления ОДЛ и ОДП. Первая группа выходов блока 18.i релейной коммутации вагонов, поступающая на первую группу входов блока 19.i вагонного контроллера, представляет собой сигналы обратного контроля для возможности проверки состояния ключей (выявления ложного замыкания) и проверки их срабатывания. Вторая группа выходов подключена к схеме 21.i цепей управления вагона, а третья группа подключена к схеме 20.i цепей управления дверями.
На фиг.6 представлена структурная схема 20.i цепей управления дверями. На первую группу входов, на реле, с третьей группы выходов блока 18.i релейной коммутации вагона поступают команды управления дверями:
p15 - ОДЛ;
p16 - ОДП;
р17 - ЗД.
После срабатывания одного из исполнительных реле р15-р17 и замыкания ключа к15, к 16 или к 17 команда (вторая группа выходов) поступает на управление дверными воздухораспределителями 23.
Первая группа выходов (т15, т16 и т17) представляет собой сигналы обратного контроля, поступающие на вторую группу входов блока 19.i вагонного контроллера. На второй вход схемы 20.i цепей управления дверями, связанный с исполнительным реле р17 всех вагонов, с блока 3 терминала машиниста может быть выдана команда ЗД, которая передается посредством поездного провода 25 (ЗД). Реле р17 управляются командой ЗД с каждого блока 18.i релейной коммутации вагона. Через контакты исполнительного реле р17 происходит непосредственное управление закрытием дверей вагона. Объединение команды ЗД, поступающей от блока 18.i релейной коммутации вагона и от блока 14 релейной коммутации, передаваемой посредством поездного провода 25, происходит по «монтажному ИЛИ» в схеме оборудования вагона. (Следует отметить, что схема 20.i цепей управления дверями, схема 21.i цепей управления вагона и ЭПК непосредственно в систему управления движением электроподвижного состава не входят и являются частью схемы управления вагонного и поездного оборудования, а представлены для иллюстрации связей, введенных с целью диагностики и позволяющих контролировать состояние схем поезда и воздействие на них системы управления).
На фиг.7 представлена структурная схема 21.i цепей управления вагона, которая в систему управления движением электроподвижного состава не входит, является принадлежностью вагонного оборудования. На первую группу входов, на реле р18-р21, со второй группы выходов блока 18.i релейной коммутации вагона поступают команды управления пневмотормозами и блокировками двигателей:
р18 - В1;
р19 - В2;
p20 - BLJ;
p21 - BLK.
После срабатывания одного из исполнительных реле и замыкания ключа к18, к19, к20 или к21 команда (вторая группа выходов) поступает непосредственно на 22 - управление В1 или В2, или на контейнер управления двигателями. Первая группа выходов представляет собой сигналы обратного контроля, поступающие на вторую группу входов блока 19.i вагонного контроллера.
Работа системы начинается с начального тестирования поездной аппаратуры. После установки ключа в один из блоков терминалов машиниста (санкционированный доступ в систему) на дисплей соответствующего блока терминала машиниста выводится информация о результатах начальной установки системы, при этом проводится тестирование аппаратуры и проверка комплектности основных устройств. До получения команд от ведущего бортового компьютера 6 все блоки 19.i вагонных контроллеров производят установку конфигурации периферийных плат и формируют нулевое значение по всем разовым выходным командам.
По запросам машиниста отрабатываются команды управления дверями, пневматическим оборудованием, а также может проводится выбор дальнейшего режима работы. С точки зрения функциональной программы головным считается вагон, в котором установлен ключ основного управления и из которого осуществлен перевод системы в рабочий режим:
- на дисплее формируется видеокадр «выход на линию»;
- формируется команда на закрытие дверей;
- формируется команда на включение электропневматического вентиля В1.
При управлении поездом на линии система управления движением электроподвижного состава работает в следующих режимах:
АВ - режим автоведения, - основной режим работы, при котором управление поездом осуществляет система с обеспечением возможности контроля со стороны машиниста;
КС - режим контроля скорости движения;
ОС - режим ограничения скорости движения.
В режиме АВ обеспечивается выполнение следующих функций:
а) при управлении поездом при подходе и остановке на станции:
- прицельное торможение;
- фиксация прибытия поезда на станцию;
- формирование команды открытия дверей;
- индикация на блок терминала машиниста текущих параметров на стоянке.
б) при управлении поездом на станции:
- отсчет и индикация времени плановой стоянки поезда на станции;
- формирование команды отключения электрического тормоза;
- формирование команды включения зуммера (сигнал разрешения отправления);
- формирование команды закрытия дверей и контроль закрытия дверей;
- формирование команды отключения вентиля замещения В1;
- формирование команд включения и выключения тяги;
- фиксация отправления поезда со станции, установка и индикация признаков, определяющих режим управления движением поезда по перегону.
в) при регулировании скорости и управлении торможением поезда на перегоне:
- формирование команд торможения при разности между допустимой, получаемой по рельсовому каналу, и фактической скоростями поезда в пределах 2-4 км/ч и отключение торможения после превышения указанной разности;
- формирование команд торможения по допустимой скорости (VД)=0 до полной остановки;
- формирование команд торможения по VД="НЧ" (нет частоты);
- разрешение движения под педалью бдительности;
- формирование команд торможения по признаку неисправности ПА до полной остановки поезда;
- формирование запрета тягового режима перед началом торможения;
- контроль срабатывания пневмотормозов В1, В2;
- контроль эффективности торможения и при его отсутствии включение ЭПК;
- отмена запрета тягового режима после снижения скорости;
- исключение скатывания поезда более чем на один оборот колеса.
В режиме КС управление поездом осуществляется машинистом под контролем подсистемы безопасности системы управления движением электроподвижного состава поезда с ограничением скорости движения по допустимой скорости VД. В этом режиме исключается автоматизированное управление тягой, прицельным торможением и открытием/закрытием дверей. Остальные функции системы управления движением электроподвижного состава поезда совпадают с режимом АВ.
Режим ОС совпадает с режимом КС с ограничением скорости движения до 20 км/ч (при VД≤40 км/ч) или до 35 км/ч (при VД>40 км/ч) под нажатой педалью бдительности. Кроме того, возможно управление поездом машинистом в ручном режиме, при этом обеспечивает выполнение функций режимов КС и ОС.
Для управления движением поезда используется оперативная информация от датчиков скорости и пути о местоположении поезда, его фактической скорости, ускорении и о допустимой скорости, получаемой в результате декодирования сигналов рельсовых цепей, от двух катушек индуктивности, а также данные базы данных. При этом с помощью датчиков коррекции пути вычисляются погрешности счисления местоположения поезда.
Система управления непрерывно измеряет фактическую скорость поезда и сравнивает ее с допустимой. Если фактическая скорость не превышает допустимую, то поездные устройства не оказывают влияния на процесс управления поездом. При фактической скорости меньше допустимой и исправной системе управления разрешается движение в режиме, определяемом машинистом поезда. В случае превышения допустимой скорости выдается команда на торможение с предварительным отключением тяговых двигателей 5 и сигнализацией об их автоматическом отключении и включении торможения.
В каждом вагоне поезда установлены электропневматические вентили В1 и В2. Управление ими система осуществляет в соответствии с заложенными алгоритмами решения задач. Включение вентиля В1 также может осуществить машинист, подав нажатием кнопки «В1» на блоке 3 терминала машиниста запрос в систему на включение вентиля В1. Сигналы на включение или отключение В1 и В2 в каждом вагоне формируют блоки 19.i вагонных контроллеров по командам, полученным от первого бортового компьютера 6 по второму последовательному интерфейсу 9. Сигналы поступают на исполнительные реле р18, р19, которые коммутируют напряжение аккумуляторной батареи +24 В на В1 или В2 (фиг.7).
При формировании команды на включение пневматического тормоза В1 контролируется появление сигнала СОТ из группы 26 вагонных проводов. Если сигнал не появился в течение времени до 2,5 с, то формируется команда на включение пневматического тормоза В2. Включение В2 осуществляется и при недостаточном электроторможении. Снятие команд «В1» и «В2» выполняется при формировании ходовых команд. При этом также контролируется значение сигнала СОТ из группы 26 вагонных проводов.
Сигналы контроля состояния тормозных колодок СОТ поступают на вход блока 19.i вагонного контроллера в каждом вагоне. Кроме этого, в случае превышения определенного уровня давления в тормозных цилиндрах, поступают сигналы АВУ и АВТ из группы 26 вагонных проводов, сигнализирующие о необходимости отменить режим тяги или электрического торможения (фиг.4).
В головных/хвостовых вагонах установлены ЭПК. Управление ими осуществляют блоки 15 управления ЭПК. Сигналы управления передаются по двухпроводной линии, изолированной от корпуса вагона. При наличии давления в магистрали ЭПК на вход блока 19.i вагонного контроллера в головных вагонах поступает сигнал СДЭ. Первоначально включается электрическое торможение с контролем эффективности его действия. В случае неподтверждения действия электрического торможения через установленное время включаются пневматические тормоза и система их контроля. В случае экстренного торможения по команде от первого (ведущего) бортового контроллера 6 снятием одного из сигналов, выдаваемых на блок 15 управления ЭПК может быть задействован ЭПК 16, который может быть также задействован и при угрозе опасного отказа от второго бортового контроллера 7, который работает в качестве «монитора» на первом последовательном интерфейсе 8, принимая всю информацию, выполняя функциональную программу и осуществляя контроль за выдачей команд первым бортовым компьютером 6 на второй последовательный интерфейс 9 в блоки 19.i вагонных контроллеров. Каждый блок 19.i вагонного контроллера является «мастером» на связи с контейнером и каждые 25 мс выходит на связь с MASTER-платой контейнера. Пакет данных, полученных от контейнера, блок 19.i вагонного контроллера передает по CAN-интерфейсу 9 для приема первым и вторым бортовыми компьютерами 6 и 7.
Управление двигателями 5 возможно в следующих режимах: режим хода, режим выбега, режим электрического торможения, режим сервисной диагностики. При отсутствии связи по CAN каналу контроллера 4.f двигателей с блоком 19.i вагонного контроллера он переводит двигатели в состояние «выбега».
По команде от первого бортового компьютера 6 блоками 19.i вагонных контроллеров могут быть выданы команды BLK или BLJ в любой из контроллеров 4.f двигателей.
Передача команд управления дверями на каждый из вагонов поезда осуществляется по поездным проводам: ЗД - поездной провод 25; ОДЛ, ОДП - группа поездных проводов 24. Команды на открытие дверей формируются системой автоматически (в режиме АВ) или по запросу машиниста (нажатие кнопок открытия дверей на блоке терминале машиниста) под контролем системы. Команда на закрытие дверей формируется как системой, так и непосредственно машинистом (сигнал закрытия дверей с тумблера ЗД на терминале машиниста поступает на поездной провод 25). Команды управления дверями формируются как первым бортовым компьютером 6 для передачи в первый блок 13 релейной коммутации, так и вторым бортовым компьютером 7, для передачи во второй блок 14 релейной коммутации. При формировании ответственных команд управления дверями ОДЛ и ОДП в системе предусмотрена защита от "ложного срабатывания". Для прохождения данных команд необходимо, чтобы сработали два последовательно соединенных релейных ключа к2 и к5, или к3 и к6, соответственно (реализуется логическая схема "И") при включенном питании к1, а также замыкание еще одного последовательно подключенного ключа в каждом блоке 18.i релейной коммутации. Прохождение команд ОДЛ, ОДП возможно только при условии отсутствия блокировочной команды ЗД с блока 3 терминала машиниста. В режиме автоведения команды на открытие дверей должны быть подтверждены сигналами, получаемыми от станции с помощью блока 12 радиосвязи. Таким образом открытие дверей происходит только при наличии сигналов, полученных «разными путями». В то же время команда на закрытие дверей передается на исполнительные элементы, если ее вырабатывает хотя бы один из следующих блоков: или блок 3 терминала машиниста, или второй блок 14 релейной коммутации посредством поездного провода 25, или блок 18.i релейной коммутации вагона.
Для исключения опасного отказа, в результате которого может произойти несанкционированное открытие дверей, в блок 19.i вагонного контроллера была введена возможность приема команды открытия дверей от ведущего бортового компьютера, которая реализуется совместно с первым и вторым блоками 13, 14 релейной коммутации и блоком 18.i релейной коммутации вагона, в результате чего схема на «открытие дверей» стала организована по «И».
Благодаря введенным в блоки 19.i вагонных контроллеров обратным связям стали доступны точки контроля ключей, что позволяет исключить накопление отказов. Кроме того, появилась возможность получать информацию от схем цепей управления каждого вагона. В процессе штатной работы, в фоновом режиме, по контрольным точкам проверяются тракты выдачи команды ЗД на наличие «короткого замыкания» или «обрыва». Также как и при контроле трактов прохождения сигналов открытия дверей, для расширенного контроля всех ключей, участвующих в выдаче команды ЗД, используется периодическое снятие питания с ключей первых блоков 13 релейной коммутации с помощью команд, подаваемых на р1.
По аналогичной схеме происходит контроль и диагностика трактов выдачи остальных дискретных команд, выдаваемых блоками 19.i вагонных контроллеров на блоки 18.i релейной коммутации вагонов (В1, В2, BLK, BLJ). На индикацию машинисту выводится информация о состоянии сигналов КД, СОТ, B1, B2.
С целью исключения возможного накопления отказов при работе на линии предусмотрена тестовая проверка исполнения указанных команд, которая производится на каждой станции при выполнении штатной процедуры открытия дверей. Тестовая проверка на каждой станции производится также по командам управления ЭПК.
Для реализации блоков системы может быть использована современная элементная база и выпускаемые промышленностью устройства:
в качестве датчиков скорости и пути могут быть использованы индукционные реверсивные датчики, например, ИОФС.013.00.000 «ФЛАРС ООО», Республика Беларусь;
катушки индуктивного канала, МПК 5061-00-00 ТУ32Ц Метро 1-75, входят в состав вагонного оборудования головных/хвостовых вагонов;
в качестве привода может быть использован асинхронный тяговый привод чешского предприятия «Шкода», в состав которого входит контроллер двигателей и четыре двигателя. Контейнер привода оснащен тяговым оборудованием для четырех асинхронных двигателей и содержит инверторы для вспомогательных приводов. В контейнере также установлено зарядное устройство аккумуляторной батареи;
каждый из бортовых компьютеров и блоков вагонных контроллеров имеет в своем составе процессорный блок, например CPU 686E - СРС 10501 фирмы Fastwel; CAN-порты, в качестве которых могут быть использованы платы адаптера канала KIB 985-01. фирмы Fastwel; блок ввода/вывода, в качестве которого может быть использована, например, плата дискретного ввода/вывода UNIO96-5 фирмы Fastwel, подключенная к блоку ввода, например, может быть использована плата гальванической изоляции каналов дискретного ввода TBI-24/0 - фирмы Fastwel;
блок радиосвязи, может быть реализован на базе радиомодема, например, фирмы SATEL, и контроллера, например, CPU 188-5 фирмы Fastwel с CAN-портами, например, CAN-200 МР фирмы «Элкус»;
для реализации блока связи может быть использован сигнальный процессор eZdsp TMS320F2812 и приемо-передатчик А82С250;
в качестве блоков релейной коммутации и блоков релейной коммутации вагонов может быть использована релейная плата TBR8 фирмы Fastwel.
Предлагаемая система управления движением электроподвижным составом позволяет обеспечить безопасную эксплуатацию электроподвижного состава:
1 непрерывный контроль за соблюдением допустимой скорости и автоматическое торможение при превышении поездом этой скорости;
2 автоматическое торможение поезда до полной его остановки перед занятым участком пути, а также перед участком пути, на котором нарушена целостность рельсовой цепи;
3 контроль за эффективностью торможения, и в случае его неэффективности, выдачу команды на экстренное торможение путем выключения электропневмоклапана (снимается питание с ЭПК);
4 невозможность движения поезда со скоростью более 20 км/час при нажатой педали безопасности (ПБ) при приеме команды, запрещающей движение, или при отсутствии сигнала в рельсовой цепи (при неработающем радиоканале);
5 невозможность скатывания поезда после его остановки;
6 выдачу машинисту информации о допустимой скорости и прогнозе ее изменения;
7 индикацию машинисту фактической скорости;
8 ограничение пути осаживания на станциях закрытого типа;
9 удерживание дверей в закрытом состоянии до выполнения условий их открытия;
10 запрет на открытие дверей поезда при отсутствии разрешения от станции (радиосвязь) и "ненулевой" фактической скорости поезда;
11 запрет на открытие дверей поезда со стороны, противоположной платформе, и несанкционированное открытие дверей вне предусмотренной зоны остановки поезда.
Заявляемое изобретение позволяет:
1. Повысить безопасность эксплуатации:
- обеспечить независимость путей прохождения информации и команд, повысив их достоверность;
- исключить возможность ложного открытия дверей;
- исключить накопление отказов.
2. Реализовать дополнительные функции:
- повагонное открытие дверей;
- возможность повагонного контроля и диагностики силовых ключей системы и исполнительных реле вагона;
- возможность повагонного контроля выполнения команды на закрытие дверей.
3. Улучшить технологичность, облегчить техническое обслуживание за счет автоматизации и расширения диагностических возможностей, повысить качество контроля и уменьшить влияние человеческого фактора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2003 |
|
RU2249525C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2022 |
|
RU2790985C1 |
| ЦЕНТРАЛЬНАЯ УПРАВЛЯЮЩАЯ СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ И СВЯЗИ ПАССАЖИРСКОГО ПОЕЗДА | 2009 |
|
RU2405699C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| Система управления распределенная автоматизированная для организации интервального регулирования движения поездов | 2021 |
|
RU2806570C2 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| Система интервального регулирования движения поездов на основе спутниковых навигационных средств и цифрового радиоканала с координатным методом контроля | 2016 |
|
RU2618659C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
Изобретение относится к области управляющих систем и может быть использовано для автоматизированного управления движением и обеспечения безопасности движения пассажирского электропоезда, в частности метрополитена. Система управления движением электроподвижного состава поезда содержит размещенные в головном и хвостовом вагонах датчики скорости и пути, датчики коррекции пути, катушки индуктивного канала, антенну с блоком радиосвязи, блок терминала машиниста, блок управления электропневмоклапаном, бортовые компьютеры, блоки релейной коммутации, последовательные интерфейсы, а также блоки релейной коммутации вагонов, блоки вагонных контроллеров и контроллеры двигателей вагонов. Техническим результатом является обеспечение независимости путей прохождения информации и команд, исключение возможности накопления отказов и ложного открытия дверей, повышение достоверности контроля и диагностики схем системы и оборудования вагона, уменьшение влияния человеческого фактора, что в целом позволяет повысить степень безопасности перевозок пассажиров. 7 ил.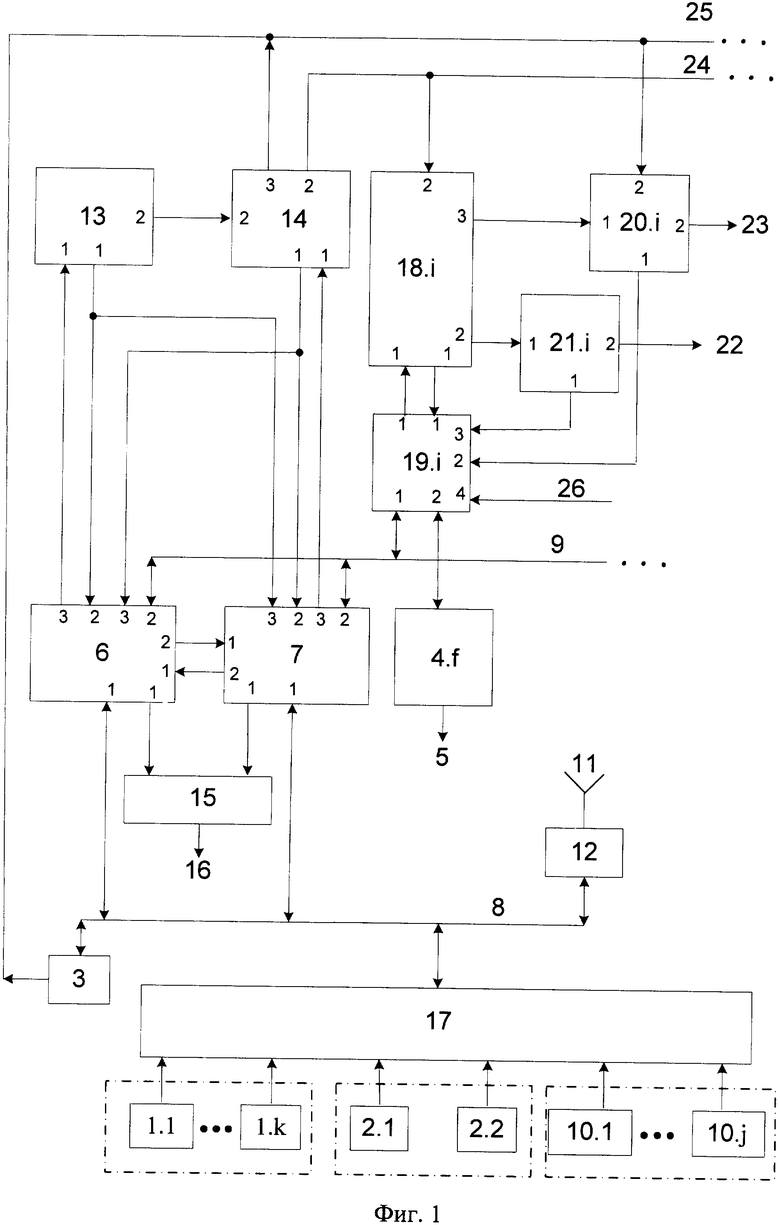
Система управления движением электроподвижного состава, содержащая датчики скорости и пути, блок терминала машиниста, контроллеры двигателей, два бортовых компьютера и два последовательных интерфейса, отличающаяся тем, что в нее введены катушки индуктивного канала, датчики коррекции пути, антенна с блоком радиосвязи, два блока релейной коммутации, блок управления электропневмоклапаном, блок связи, по числу вагонов введены блоки релейной коммутации вагонов и блоки вагонных контроллеров, при этом катушки индуктивного канала, датчики пути и скорости, датчики коррекции пути подключены к блоку связи, блок связи, блок радиосвязи и блок терминала машиниста через первый последовательный интерфейс подключены к первым входам/выходам первого и второго бортовых компьютеров, первые группы выходов бортовых компьютеров связаны с блоком управления электропневмоклапаном, вторая группа выходов первого бортового компьютера связана с первой группой входов второго бортового компьютера, вторая группа выходов второго бортового компьютера связана с первой группой входов первого бортового компьютера, третья группа выходов первого бортового компьютера связана с первой группой входов первого блока релейной коммутации, вторая группа выходов которого связана со второй группой входов второго блока релейной коммутации, первая группа выходов которого связана со второй группой входов второго бортового компьютера и с третьей группой входов первого бортового компьютера, вторая группа входов которого связана с первой группой выходов первого блока релейной коммутации и с третьей группой входов второго бортового компьютера, третья группа выходов которого связана с первой группой входов второго блока релейной коммутации, вторая группа выходов которого подключена к группе поездных проводов и ко вторым группам входов блоков релейной коммутации всех вагонов, а третий выход подключен посредством поездного провода к выходу блока терминала машиниста и ко вторым входам схем цепей управления дверями всех вагонов, вторые входы/выходы первого и второго бортовых компьютеров подключены посредством второго последовательного интерфейса к первым входам/выходам блоков вагонных контроллеров всех вагонов, которые своими вторыми входами/выходами связаны с контроллерами двигателей соответствующих вагонов, а своей первой группой выходов связаны с первыми группами входов блоков релейной коммутации соответствующих вагонов, подключенных первыми группами выходов к первым группам входов блоков вагонных контроллеров соответствующих вагонов, которые своими вторыми группами входов подключены к первым группам выходов схем цепей управления дверями соответствующих вагонов, а своими третьими группами входов подключены к первым группам выходов схем цепей управления соответствующих вагонов, вторые группы выходов которых связаны со схемами управления пневмотормозами и блокировками двигателей соответствующих вагонов, группы входов схем цепей управления вагонов подключены ко вторым группам выходов блоков релейной коммутации вагонов, третьи группы выходов которых подключены к первым группам входов схем цепей управления дверями соответствующих вагонов, вторые группы выходов которых связаны с дверными воздухораспределителями, а четвертый вход вагонных контроллеров связан с группой вагонных проводов.
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2003 |
|
RU2249525C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ЛОКОМОТИВОМ И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2003 |
|
RU2262459C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| US 5340062 A, 23.08.1994 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| БОРТОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ВЫСОКОСКОРОСТНОГО ПОЕЗДА | 2003 |
|
RU2238208C1 |

