Изобретение относится к пассажирским транспортным системам, а именно к монорельсовым системам эстакадного типа с линейным тяговым приводом, в состав которой входит подвижной состав с магнитной разгрузкой и ходовая балка.
Известен подвижной состав монорельсовой транспортной системы (RU №2188775), содержащий головной, хвостовой и промежуточные выгоны с кузовами, закрепленными на соответствующих подвагонных рамах, ходовые тележки, выполненные с поперечным ходовым мостом, на концах которого закреплены ходовые колеса, стабилизационную раму, каретку, вертикальные стабилизационные колеса, закрепленные на каретке и горизонтальные стабилизационные колеса, закрепленные на стабилизационной раме, системы управления, а также линейный тяговый двигатель с активными элементами, закрепленными на каретке, а пассивные элементы установлены на верхней поверхности ходовой балке. Поперечный ходовой мост и стабилизационная рама объединены в единый компоновочный узел, соединенный с кареткой посредством упругих деформируемых и промежуточных передаточных элементов. Подвагонные рамы имеют узлы крепления с кузовами, а также между собой и с ходовыми мостами тележек.
К недостаткам указанной конструкции следует отнести то, что пассивные элементы линейного тягового двигателя размещены на внешней горизонтальной поверхности ходовой балки, что усложняет функционирование транспортной системы в зимний период эксплуатации (снег и наледь необходимо счищать с верхней части ходовой балки). Кроме этого ходовые колеса тележки с поперечным ходовым мостом воспринимают вес всего подвижного состава, что приводит к увеличению их массы и габаритов.
Известен подвижной состав монорельсовой транспортной системы (RU №2762708), содержащий вагоны, закрепленные на подвагонных рамах, единый компоновочный узел, выполненный с возможностью углового перемещения относительно подвагонной рамы в горизонтальной плоскости, состоящий из ходовых колес, ходового моста и стабилизационной рамы, горизонтальные стабилизационные колесные пары, системы управления, линейный тяговый двигатель, состоящий из закрепленных на ходовой балке монорельсовой транспортной системы пассивных, и закрепленных на подвижном составе активных элементов в виде индукторов, пассивные элементы каждого линейного тягового двигателя симметрично закреплены на боковой поверхности ходовой балки монорельсовой транспортной системы, а активные элементы-индукторы линейного тягового двигателя симметрично закреплены на стабилизационной раме соосно с горизонтальной стабилизационной колесной парой, а сам единый компоновочный узел дополнительно снабжен электромагнитами, закрепленными на стойке, установленной на стабилизационной раме выше активных элементов линейного тягового двигателя, при этом стойка имеет возможность вертикального перемещения, а электромагниты взаимодействуют с внутренней горизонтальной поверхностью ходовой балки с гарантированным зазором, и на них установлены антифрикционные накладки из материала -диэлектрика, ходовые колеса выполнены обрезиненными и попарно закреплены на осях, запрессованных в кронштейны, установленные на поперечном ходовом мосту стабилизационной рамы, а весь единый компоновочной узел выполнен с возможностью перемещения относительно подвагонной рамы в вертикальной плоскости, нормальной к плоскости движения подвижного состава. При этом система управления линейных тяговых двигателей выполнена с алгоритмом совместного регулирования силы тока, реализующего независимое управление силой тяги и силой притяжения в направлении противоположном боковому смещению единого компоновочного узла, в диапазоне от нулевой до максимальной скорости.
В указанной конструкции введение магнитной разгрузки, воспринимающей вес всего подвижного состава и приводящей к уменьшению его массы и габаритов, имеет положительное влияние. Однако работа системы управления, ее значение и влияние на безопасность и комфортность пассажиров, работы ЭПС монорельсовой транспортной системы в различных режимах, в том числе экстренных, в этом патенте не описано.
Известна монорельсовая транспортная система (RU №2180295 -принятый за прототип), содержащая станции, электродепо со стрелочными переводами, эстакаду, выполненную в виде размещенной на опорах стальной ходовой балки коробчатого сечения, перемещающиеся по эстакаде электроподвижные составы (ЭПС) с головным, хвостовым и пассажирскими вагонами, закрепленными на подвагонных рамах, соединенных шарнирно с помощью ходовой тележки, выполненной с возможностью углового перемещения подвагонных рам в горизонтальной и вертикальной плоскостях, состоящей из опорных колес, ходовой и стабилизационной рамы, горизонтальных стабилизационных колесных пар, систему управления подвижным составом с комплексом программно-аппаратных средств, линейный тяговый двигатель, состоящий из пассивных элементов, закрепленных на ходовой балке монорельсовой транспортной системы и активных элементов в виде индукторов, закрепленных на подвижном составе, систему электроснабжения МТС с контактной сетью и систему диспетчерского управления.
К недостаткам указанной конструкции прототипа следует отнести то, что пассивные элементы линейного тягового двигателя размещены на внешней горизонтальной поверхности ходовой балки, что усложняет функционирование транспортной системы в зимний период эксплуатации Кроме этого монорельсовая транспортная система не обладает магнитной разгрузкой в результате ходовые колеса тележки с поперечным ходовым мостом воспринимают вес всего подвижного состава, что приводит к увеличению их массы и габаритов, увеличению износа, и усложнению остановки состава в случае экстренного или аварийного торможения.
Задачей данного изобретения является создание монорельсовой транспортной системы с использованием в электроподвижном составе (ЭПС) принципа магнитной разгрузки и достижением технического результата в виде улучшения эксплуатационных характеристик и безопасности монорельсовой транспортной системы за счет создания автоматизированной системы управления (АСУ) электроподвижным составом, предназначенной для обеспечения безопасной, бесперебойной и комфортной работы ЭПС монорельсовой транспортной системы в различных режимах.
Эта задача решается таким образом, монорельсовая транспортная система (МТС), содержащая станции, электродепо со стрелочными переводами, эстакаду, выполненную в виде размещенной на опорах стальной ходовой балки коробчатого сечения, перемещающиеся по эстакаде электроподвижные составы (ЭПС) с головным, хвостовым и пассажирскими вагонами, закрепленными на подвагонных рамах, соединенных шарнирно с помощью ходовой тележки, выполненной с возможностью углового перемещения подвагонных рам в горизонтальной и вертикальной плоскостях, состоящей из опорных колес, ходовой и стабилизационной рамы, горизонтальных стабилизационных колесных пар, систему управления подвижным составом с комплексом программно-аппаратных средств, линейный тяговый двигатель, состоящий из пассивных элементов, закрепленных на ходовой балке монорельсовой транспортной системы и активных элементов в виде индукторов, закрепленных на подвижном составе, систему электроснабжения МТС с контактной сетью и систему диспетчерского управления при этом на ходовой балке размещены радиочастотные метки, взаимодействующие со считывателями радиочастотных меток, размещенных на головном вагоне, на головном вагоне установлен радар, взаимодействующий с хвостовым вагоном ранее вышедшего из электродепо ЭПС, а ходовые тележки ЭПС снабжены системой магнитной разгрузки, содержащей электромагниты, взаимодействующие с внутренней горизонтальной поверхностью ходовой балки, электрооборудованием и системой управления подвижным составом, включающим в себя процессор управления, комплект преобразовательного оборудования для левого и правого борта ходовой тележки, состоящий из преобразователя частоты и напряжения для линейных двигателей и блока регулятора тока электромагнитов левитации, а сама тележка оборудована датчиковой аппаратурой, включающей в себя датчики веса, датчики бокового давления, установленные на кронштейнах рамы ходовой тележки, датчики скорости и датчики контроля зазора между электромагнитами и поверхностью ходовой балки, при этом горизонтальные стабилизационные колесные пары закреплены на стабилизационной раме на оси с возможностью разворота и контактирования с датчиком бокового давления, в опорные колеса ходовой тележки встроены электромагнитные тормоза, а сама система управления ЭПС выполнена автоматизированной, связаной с системой управления движением (СУД) МТС в различных режимах движения, задавая требуемую скорость движения и команды на торможение, при этом СУД МТС - единая и взаимодействует со всеми электроподвижными составами, станциями, электродепо, регулирует движение ЭПС и взаимодействует с вспомогательными системами, координирует работу смежных систем управления в полуавтоматическом или автоматическом режимах, таких как - управление движением линейного тягового двигателя ЭПС, системы стабилизации и системы магнитной разгрузки, микроклимата, приводов автоматических дверей, системы автоматического обнаружения и тушения пожаров, а сам комплекс программно-аппаратных АСУ ЭПС имеет трехуровневую резервированную иерархическую структуру с функциональным разделением на подсистемы, взаимодействующие по выделенным проводным и беспроводным каналам связи. Система электроснабжения монорельсовой транспортной системы осуществляется сетью тяговых трансформаторных подстанций, предназначенных для приема электроэнергии переменного тока частотой 50 Гц, напряжением 6/10 кВ от внешней сети с двумя независимыми источниками электрической энергии и преобразования ее в электроэнергию постоянного тока нагрузки до 2000 А для питания контактной сети трассы монорельсовой транспортной системы с обеспечением контроля электрических параметров (тока, напряжения, мощности) во всех режимах эксплуатации. Контактная (токонесущая) сеть выполнена в виде жесткого токопровода с тремя шинами, защищенные пластиковыми кожухами, две из которых служат для обеспечения электропитания линейного тягового двигателя, а одна шина - заземления. Крепление токонесущих шин осуществляется на кронштейнах, приваренных к ходовой балке с помощью изолированных подвесов. Подвижной состав составляет 5-6 вагонов и все вагоны в составе обеспечивают перевозку пассажиров. Все вагоны электроподвижного состава имеют сквозной проход. Пассивные элементы установлены симметрично на боковых поверхностях ходовой балки с зазором по торцам 2...5 мм. Индукторы закреплены на стабилизационных рамах с помощью резьбовых соединений с демпфером в виде резиновых шайб. Зазор между активным и пассивным элементом составляет 12...21 мм. Поверхность индуктора, прилегающая с зазором к пассивному элементу, выполнена профилированной для бесконтактного прохождения поворотов эстакады.
Изобретение поясняется фигурами чертежей.
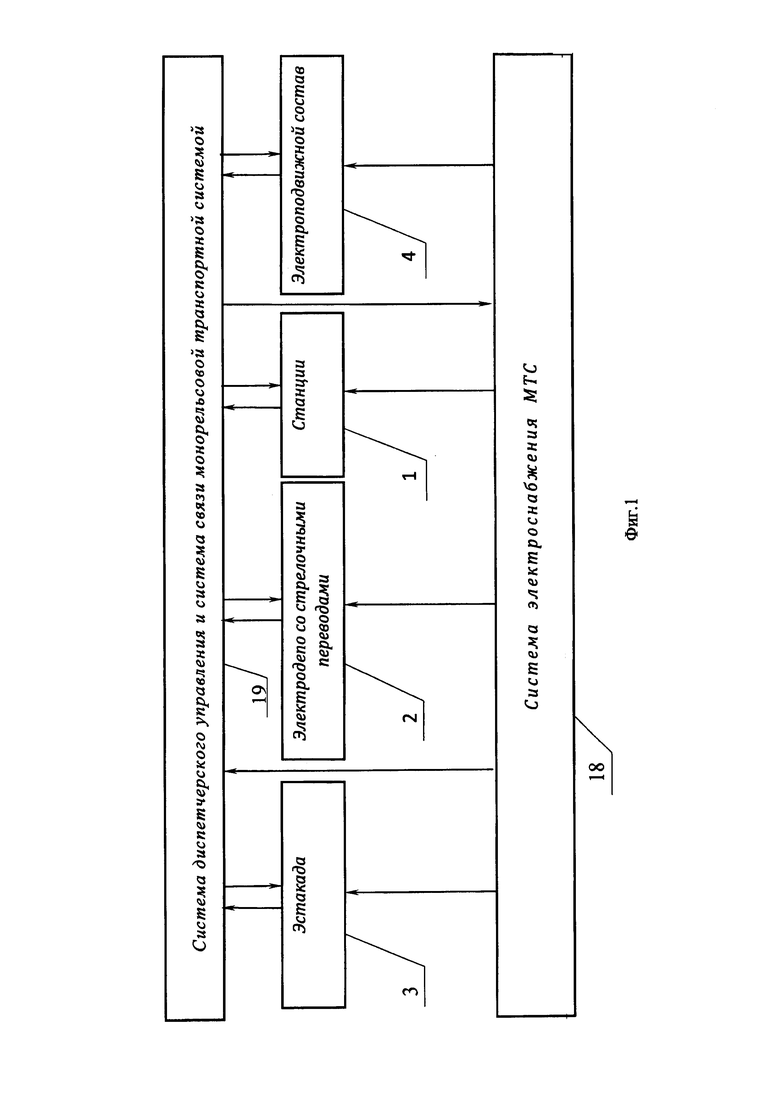
На фиг. 1 изображен состав и взаимодействие монорельсовой транспортной системы.
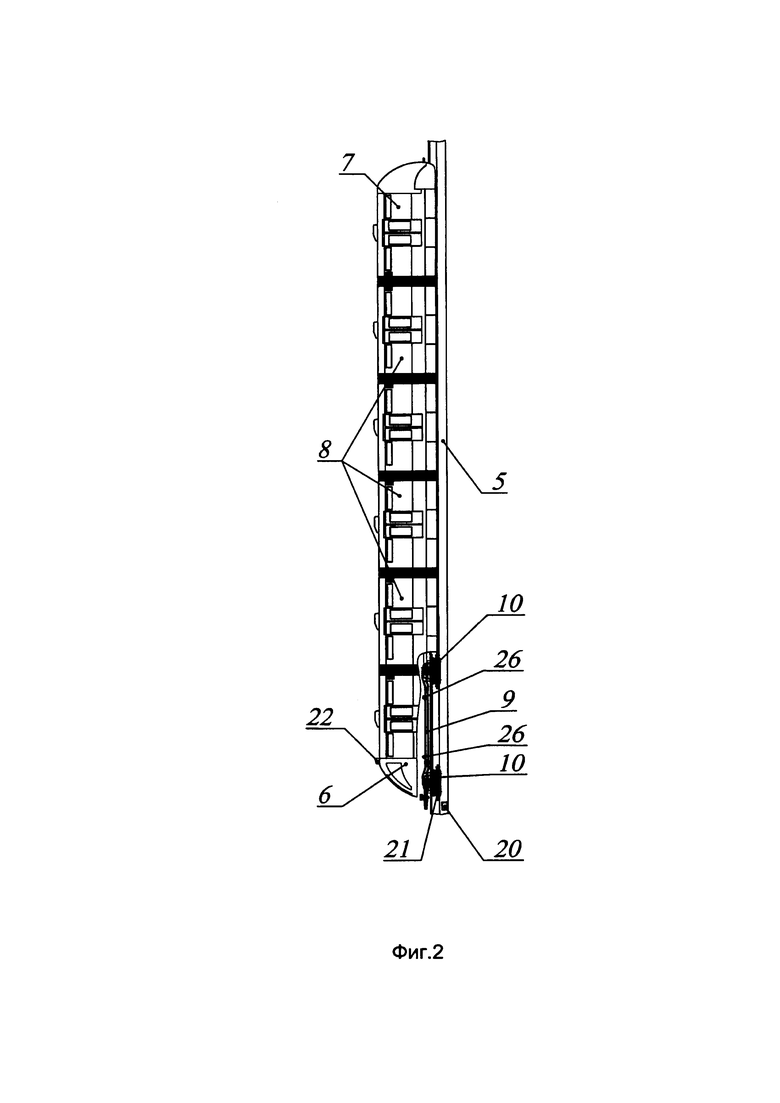
На Фиг. 2 изображен ЭПС монорельсовой транспортной системы.
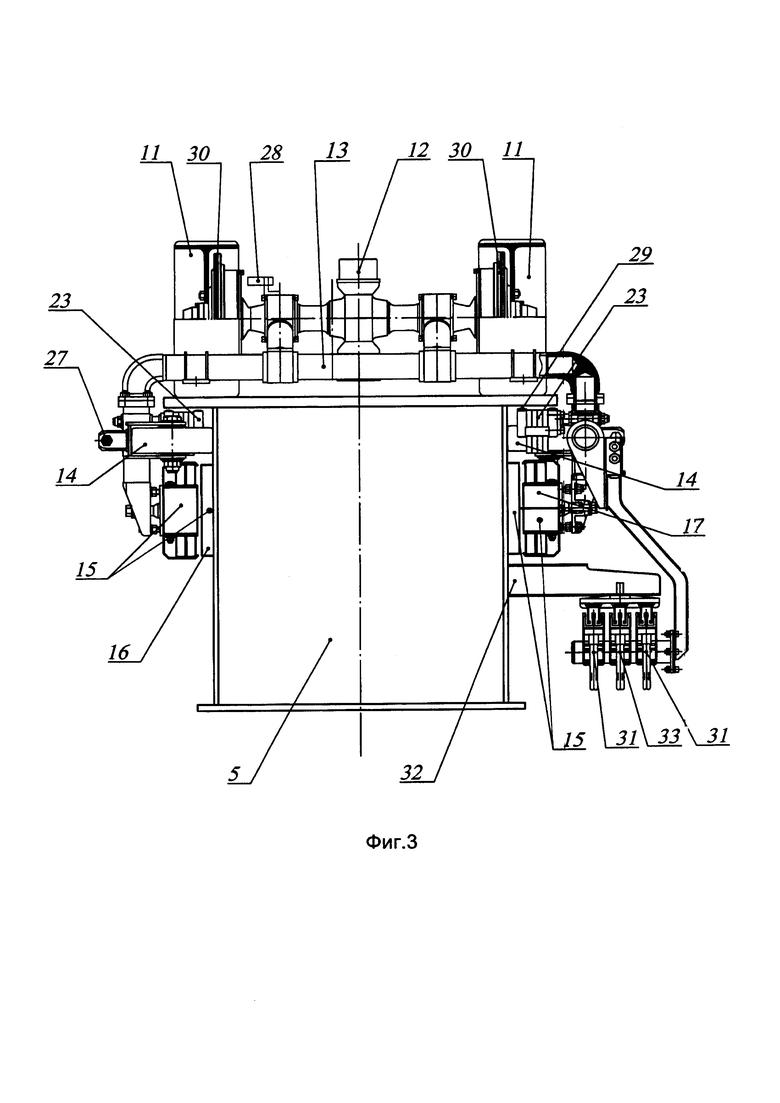
На Фиг. 3 изображена ходовая часть ЭПС.
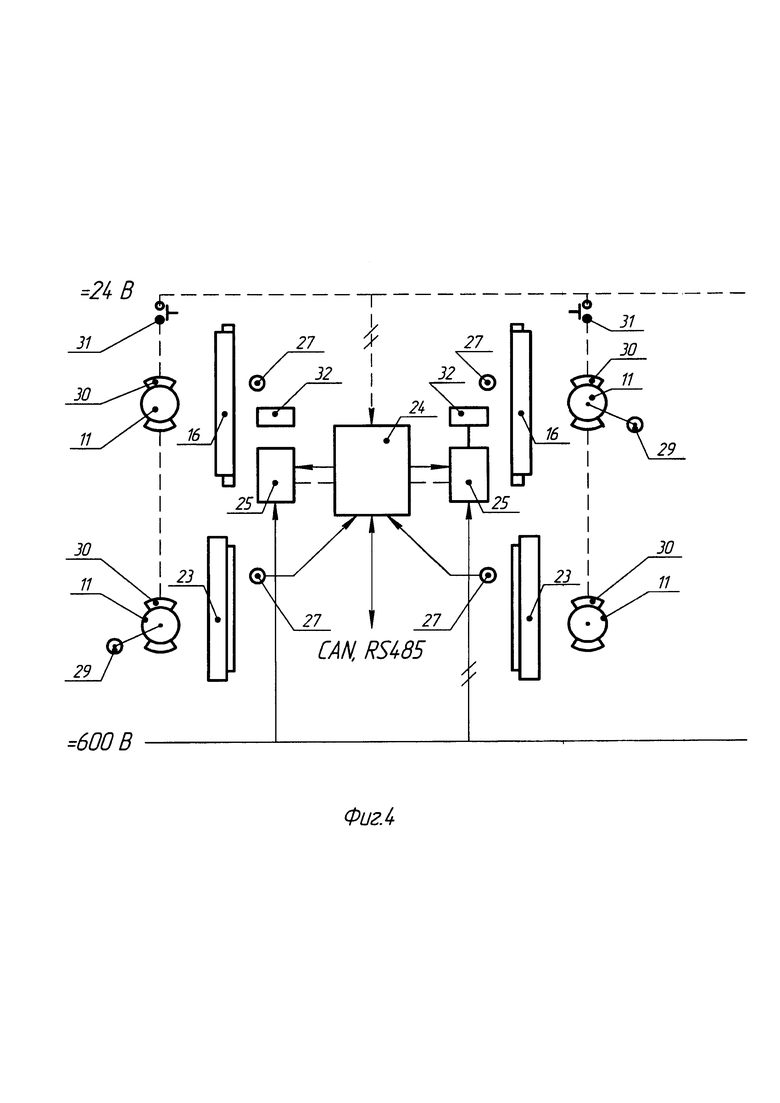
На Фиг. 4 изображена структурная схема тягово-левитационного электрооборудования ходовой тележки и устройств управления ЭПС.
Монорельсовая транспортная система (Фиг. 1) содержит станции 1, электродепо со стрелочными переводами 2 по обслуживанию подвижного состава, эстакаду 3, перемещающиеся по эстакаде электроподвижные составы 4 (ЭПС), эстакада выполнена в виде размещенной на опорах стальной ходовой балки коробчатого сечения 5 (Фиг. 2, Фиг. 3), по эстакаде перемещаются электроподвижные составы 4 с головным 6, хвостовым 7 и пассажирскими вагонами 8 (Фиг. 2), закрепленными на подвагонных рамах 9, соединенных шарнирно с помощью ходовой тележки 10, выполненной с возможностью углового перемещения подвагонных рам в горизонтальной и вертикальной плоскостях, состоящей из опорных колес 11, ходовой 12 и стабилизационной 13 рамы, горизонтальных стабилизационных колесных пар 14 (Фиг. 3), систему управления подвижным составом с комплексом программно-аппаратных средств, линейный тяговый двигатель 15, состоящий из пассивных элементов 16, закрепленных на ходовой балке 5 монорельсовой транспортной систему и активных элементов в виде индукторов 17, закрепленных на подвижном составе 5, систему электроснабжения МТС 18 с контактной сетью и систему диспетчерского управления 19. При этом на ходовой балке 5 размещены радиочастотные метки 20, взаимодействующие со считывателями радиочастотных меток 21, размещенных на головном вагоне, на головном вагоне установлен радар 22, взаимодействующий с хвостовым вагоном ранее вышедшего из электродепо ЭПС, а ходовые тележки 10 ЭПС снабжены системой магнитной разгрузки, содержащей электромагниты 23, взаимодействующие с внутренней горизонтальной поверхностью ходовой балки 5, электрооборудованием и системой управления подвижным составом, включающим в себя (Фиг. 4) процессор управления 24, комплект преобразовательного оборудования 25 (размещенного в каждом вагоне) для левого и правого борта ходовой тележки 10, состоящий из преобразователя частоты и напряжения для линейных двигателей 15 и блоки регулятора тока электромагнитов левитации 23, а сама тележка оборудована датчиковой аппаратурой, включающей в себя датчики веса 26, датчики бокового давления 27, установленные на кронштейнах рамы ходовой тележки 10, датчики скорости 28 и датчики контроля зазора между электромагнитами и поверхностью ходовой балки 29, при этом горизонтальные стабилизационные колесные пары 14 закреплены на стабилизационной раме 13 на оси с возможностью разворота и контактирования с датчиком бокового давления 27, в опорные колеса ходовой тележки 11 встроены электромагнитные тормоза 30 (Фиг. 3, Фиг. 4), а сама система управления ЭПС выполнена автоматизированной, связаной с системой управления движением (СУД) МТС в различных режимах движения, задавая требуемую скорость движения и команды на торможение, при этом СУД МТС - единая и взаимодействует со всеми электроподвижными составами 4, станциями1, электродепо 2, регулирует движение ЭПС и взаимодействует с вспомогательными системами, координирует работу смежных систем управления в полуавтоматическом или автоматическом режимах, таких как - управление движением линейного тягового двигателя 15 ЭПС, системы стабилизации и системы магнитной разгрузки, микроклимата, приводов автоматических дверей, системы автоматического обнаружения и тушения пожаров, а сам комплекс программно-аппаратных средств АСУ ЭПС имеет трехуровневую резервированную иерархическую структуру с функциональным разделением на подсистемы, взаимодействующие по выделенным проводным и беспроводным каналам связи. Система электроснабжения МТС 18 включает сеть тяговых трансформаторных подстанций, предназначенных для приема электроэнергии переменного тока частотой 50 Гц, напряжением 6/10 кВ от внешней сети с двумя независимыми источниками электрической энергии и преобразования ее в электроэнергию постоянного тока нагрузки до 2000 А, напряжением 600 В для питания контактной сети трассы монорельсовой транспортной системы с обеспечением контроля электрических параметров (тока, напряжения, мощности) во всех режимах эксплуатации. Контактная (токонесущая) сеть выполнена в виде жесткого токопровода с тремя шинами, защищенные пластиковыми кожухами, две из которых служат для обеспечения электропитания линейного тягового двигателя 31, а одна шина заземления 33 (Фиг. 3). Крепление токопровода осуществляется на кронштейнах 32, приваренных к ходовой балке с помощью изолированных подвесов. Подвижной состав составляет 5-6 вагонов (Фиг. 2) и все вагоны в составе обеспечивают перевозку пассажиров, все вагоны электроподвижного состава имеют сквозной проход. Пассивные элементы 16 (Фиг. 3) установлены симметрично на боковых поверхностях ходовой балки 5 с зазором по торцам 2...5 мм. Индукторы 17 закреплены на стабилизационных рамах с помощью резьбовых соединений с демпфером в виде резиновых шайб. Зазор между активным 17 и пассивным 16 элементами составляет 12...21 мм. Поверхность индуктора 17, прилегающая с зазором к пассивному элементу, выполнена профилированной для бесконтактного прохождения поворотов эстакады.
Работает система управления движением (СУД) следующим образом. При начале движения АСУ ЭПС выдает команду в СУД на отключение стояночного тормоза и принимает от СУД сигнал об отключении стояночного тормоза. СУД ЭПС меняет скорость с заданным ускорением после команды, от АСУ ЭПС. Ускорение определяется в СУД ЭПС. Информационный обмен при понижении скорости аналогичен информационному обмену при изменении скорости. После снижения скорости до 0 АСУ ЭПС выдает команду в СУД на включение стояночного тормоза и получает сигнал с задействовании стояночного тормоза. При аварийном торможении СУД ЭПС выдает сигнал в АСУ ЭПС о задействовании аварийного торможения. СУД выдает АСУ текущее значение скорости. При аварийном торможении АСУ ЭПС выдает команду СУД о переключении индукторов тягового линейного электропривода в режим торможения и включении стояночного тормоза.
Состав тягово-левитационного электрооборудования и устройств управления включает в себя (Фиг. 4) процессор управления 24, комплект преобразовательного оборудования 25 для левого и правого борта ходовой тележки, состоящий из преобразователя частоты и напряжения для линейных двигателей 15 и блока регулятора тока для электромагнитов левитации 23. Тележка оборудована датчиковой аппаратурой, включающей в себя датчики веса 26, датчики бокового давления 27 и датчики скорости 28. В опорные колеса ходовой тележки встроены электромагнитные тормоза 30. Включение тормозов - кнопкой 31 в ручном режиме движения ЭПС иго команде АСУ в автоматическом режиме движения ЭПС. Для рассеивания электрической мощности в режиме генераторного торможения в составе электрооборудования предусмотрены тормозные резисторы 32, установленные на крыше вагонов. Линейные электродвигатели 15, установленные на ходовой тележке, предназначены для реализации режимов движения ЭПС: разгон, выбег и электрическое торможение до полной остановки. Кроме того, двигатели левого и правого бортов тележки реализуют компенсацию нагрузки на направляющие колеса тележки (на схеме не показаны) в горизонтальной плоскости, возникающую от действия возмущающих факторов при движении ЭПС. Электромагниты левитации 23 осуществляют разгрузку опорных колес 11. Электромагнитные тормоза 30 выполняют функцию стояночного тормоза и участвуют в реализации режима аварийного торможения.
АСУ ЭПС формирует и передает команды на реализацию работы всех подсистем и исполнительных механизмов ЭПС по гальванически развязанному интерфейсу (CAN, RS 485). После поступления команды АСУ ЭПС на режим движения СУД подает команды в комплекты преобразовательного оборудования, которые преобразуют напряжение контактной сети (600 В постоянного тока) в трехфазный ток заданной частоты и амплитуды. Электрическая энергия преобразователем частоты передается двигателям соответственно левого и правого борта и реализуется режим движения с заданными параметрами. При прохождение криволинейных участков трассы в управлении двигателями предусмотрена система компенсации нагрузки на боковые колеса, которая по команде датчиков бокового давления 27 регулирует силу притяжения между индукторами так, чтобы разгрузить направляющие колеса. При этом суммарная сила тяги двух двигателей удерживается в заданной величине.
Левитационная часть работает следующим образом. По команде от датчиков веса 26 в комплектах преобразовательного оборудования задается блоком регулятора ток, необходимый для компенсации нагрузки на опорные колеса. Ток поступает в электромагниты 17, где создается необходимая подъемная сила, снижающая нагрузку на опорные колеса 11 до заданной величины. Процесс управления нагрузкой на опорные колеса происходит только на станциях, когда заходят и выходят пассажиры. На перегонах между станциями ток в левитационных магнитах не изменяется.
Электромеханический тормоз 30 питается от отдельной сети 24 В. Команда на включение тормоза реализуется по команде АСУ ЭПС или с помощью кнопки 12 аварийной остановки.
Автоматизированная система управления электрическим подвижным составом (АСУ ЭПС) является локально подсистемой в составе комплексной системы диспетчерского управления (СДУ ЭПС) и обеспечивает полноту, достоверность и оперативность получения информации о перемещений и режимах работы состава на пульте оператора-машиниста ЭПС и центральном диспетчерском пульте СДУ МТС, обеспечивает автоматизированный контроль управления подвижным составом в режимах полуавтоматического, ручного управления, служебного, аварийного и экстренного торможения, контроля обоснованности и своевременности действий оператора-машиниста по управлению ЭПС в нормальных и аварийных режимах работы, повышение точности и оперативности выполнения управляющих действий оператора-машиниста с помощью автоматического советчика, безопасного и комфортного передвижения пассажиров МТС, автоматического взаимодействия со смежными системами СДУ: управления движением (АСУД МТС), управление электроснабжением (АСУ ЭС), охранного и технологического видеонаблюдения (СОТВ) и радиосвязи.
АСУ ЭПС представляет собой многоуровневую резервированную иерархическую структуру с функциональным разделением на подсистемы, взаимодействующие по выделенным проводным и беспроводным канатам связи. В общем виде система представляет собой совокупность подсистем, имеющих следующее иерархическое деление:
Нижний уровень подсистемы состоит из комплектных блоков управления исполнительными механизмами и устройствами ходовой части, установку поддержания микроклимата, внутреннего и внешнего осветительного оборудования, автоматических дверей и аварийных выходов, оборудования противопожарной безопасности, информационного и телекоммуникационного оборудования ЭПС, первичных измерительных преобразователей (датчиков), контролирующих перемещение подвижного состава, режимы работы исполнительных механизмов и действия оператора - машиниста ЭПС, первичных устройств охранного и технологического видеонаблюдения, приемо-передающих устройств радиосвязи.
Средний уровень подсистемы представляет собой резервированные программируемые логические контроллеры (ПЛК), обеспечивающие автоматизированные режимы работы ЭПС (обработку сигналов; и управляющее воздействие на исполнительные устройства и механизмы). Верхний уровень АСУ ЭПС представляет собой пульт управления, расположенный в кабине оператора-машиниста «головного» вагона ЭПС. Пульт управления включает в себя устройства оперативного мониторинга (видеоэкраны), органы управления подвижным составом, устройства голосовой связи, оборудование сбора, обработки и архивирования технологических данных и видеопотоков, блоки телекоммуникационного оборудования и радиосвязи.
АСУ ЭПС обеспечивает управление движением ЭПС через СДУ МТС с помощью системы контроля и позиционирования (СКП) ЭПС, обеспечивающей определение местоположения ЭПС. В СКП определение местоположения ЭПС выполняется двумя независимыми способами: с помощью спутниковой системы ГЛОНАСС (GPS), и с помощью пассивных радиочастотных меток, расположенных на пути следования поезда. Радиочастотные метки устанавливаются на всем пути следования ЭПС. Каждая метка имеет свой идентификационный номер. Считыватель меток устанавливается на ЭПС в головном вагоне. В СКП ЭПС хранится карта пути, к которой привязаны: радиочастотные метки, местоположение стационарных объектов (станции, депо и т.д.), режимы (ограничения) движения ЭПС в заданном месте. Возможно создание нескольких наборов режимов движения ЭПС в зависимости, например, от погодных условий. Необходимый режим из набора выбирается оператором-машинистом или диспетчером. Определив местоположение ЭПС с помощью двух вышеуказанных способов, СКП передает информацию:
- на панель приборов оператора-машиниста, в систему управления движением (СУД) ЭПС, в СУД передается режим (ограничения) движения ЭПС, на основе которого СУД может ограничивать действия оператора-машиниста я в перспективе управлять ЭПС в беспилотном режиме,
- в информационную систему ЭПС для информирования пассажиров об остановках и времени прибытия,
- в центральный диспетчерский пункт (ЦДП), в котором проверяются режимы и график движения ЭПС в соответствии с картой движения, хранящейся в ЦДП. |
Для исключения возможности столкновения ЭПС друг с другом или с посторонним предметом на трассе система противоаварийной защиты (СПАЗ) ЭПС использует радары и видеокамеры переднего вида. Радары определяют расстояние от головного вагона до объекта на пути следования ЭПС. СПАЗ ЭПС при обнаружении радаром объекта на пути, например, другого ЭПС, формирует сигнал аварии и отрабатывает аварийное автоматическое торможение ЭПС. Радары также могут использоваться для остановки ЭПС в точном месте (станции, депо). Видеонаблюдение головного вагона позволяет регистрировать нештатные ситуации, дает возможность диспетчеру ЦДП три необходимости получить информацию с видеокамеры.
Тем самым решается задача данного изобретения - создание монорельсовой транспортной системы с использованием в электроподвижном составе (ЭПС) принципа магнитной разгрузки и достижением технического результата в виде улучшения эксплуатационных характеристик и безопасности монорельсовой транспортной системы за счет создания автоматизированной системы управления (АСУ) электроподвижным составом, предназначенной для обеспечения безопасной, бесперебойной и комфортной работы ЭПС монорельсовой транспортной системы в различных режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвижной состав монорельсовой транспортной системы | 2021 |
|
RU2762708C1 |
| ПОДВИЖНОЙ СОСТАВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2001 |
|
RU2188775C1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ПОДВИЖНЫМ СОСТАВОМ С ЛИНЕЙНЫМ ПРИВОДОМ | 2001 |
|
RU2180295C1 |
| Автоматическая грузопроводная транспортная система с автономными транспортными модулями с тяговым линейным электроприводом | 2017 |
|
RU2678917C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ МАНЕВРОВЫМИ РАБОТАМИ В ЭЛЕКТРОДЕПО МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2004 |
|
RU2247047C1 |
| Грузопроводная транспортная система с унитарным тягово-левитационным линейным электроприводом | 2017 |
|
RU2681574C2 |
| ВЫСОКОСКОРОСТНАЯ ТРАНСПОРТНАЯ СИСТЕМА, ПОЛАЯ ХОДОВАЯ БАЛКА (ВАРИАНТЫ), ХОДОВАЯ ТЕЛЕЖКА (ВАРИАНТЫ), ПОДВИЖНОЙ СОСТАВ (ВАРИАНТЫ) | 2011 |
|
RU2494897C2 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ВАГОНАМИ НА ВОЗДУШНОЙ ПОДУШКЕ | 2011 |
|
RU2488500C2 |
| Способ подготовки твердотопливной ракеты космического назначения для запуска космического аппарата и наземный стартовый подвижный ракетно-космический комплекс для его осуществления, способ сборки головного блока и комплект транспортно-технологического оборудования для его осуществления | 2023 |
|
RU2813395C1 |
| Пассажирский экраноплан | 2016 |
|
RU2624231C1 |
Изобретение относится к пассажирским транспортным системам, а именно к монорельсовым системам эстакадного типа с линейным тяговым приводом, в состав которой входит подвижной состав с магнитной разгрузкой и ходовая балка. Согласно изобретению в монорельсовой транспортной системе (МТС) на ходовой балке размещены радиочастотные метки, взаимодействующие со считывателями радиочастотных меток, размещенных на головном вагоне, на головном вагоне установлен радар, взаимодействующий с хвостовым вагоном ранее вышедшего из электродепо электроподвижного состава (ЭПС), а ходовые тележки ЭПС снабжены системой магнитной разгрузки, содержащей электромагниты, взаимодействующие с внутренней горизонтальной поверхностью ходовой балки, электрооборудованием и системой управления подвижным составом. Тележка оборудована датчиковой аппаратурой, включающей в себя датчики веса, датчики бокового давления, установленные на кронштейнах рамы ходовой тележки, датчики скорости и датчики контроля зазора между электромагнитами и поверхностью ходовой балки, при этом горизонтальные стабилизационные колесные пары закреплены на стабилизационной раме на оси с возможностью разворота и контактирования с датчиком бокового давления, в опорные колеса ходовой тележки встроены электромагнитные тормоза, а сама система управления ЭПС выполнена автоматизированной (АСУ), связанной с системой управления движением (СУД) МТС в различных режимах движения, задавая требуемую скорость движения и команды на торможение. В результате улучшаются эксплуатационные характеристики МТС и достигается ее безопасность. 10 з.п. ф-лы, 4 ил.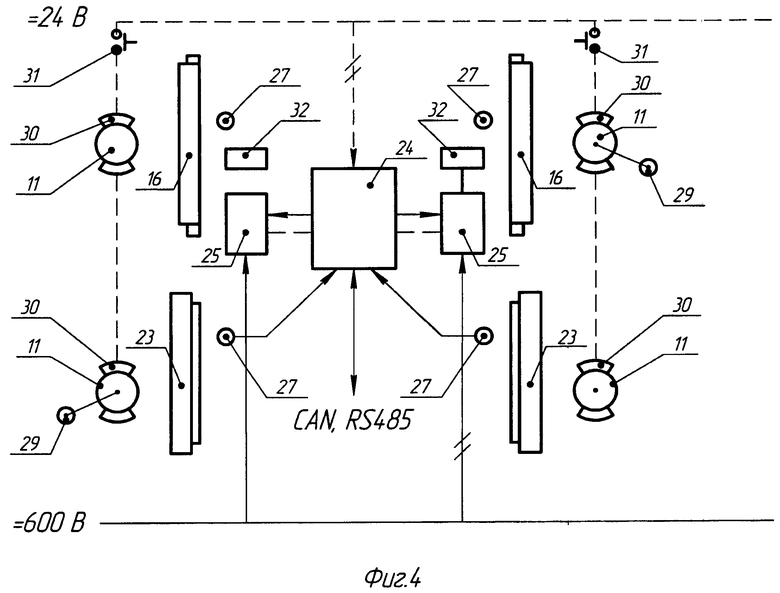
1. Монорельсовая транспортная система (МТС), содержащая станции, электродепо со стрелочными переводами, эстакаду, выполненную в виде размещенной на опорах стальной ходовой балки коробчатого сечения, перемещающиеся по эстакаде электроподвижные составы (ЭПС) с головным, хвостовым и пассажирскими вагонами, закрепленными на подвагонных рамах, соединенных шарнирно с помощью ходовой тележки, выполненной с возможностью углового перемещения подвагонных рам в горизонтальной и вертикальной плоскостях, состоящей из опорных колес, ходовой и стабилизационной рамы, горизонтальных стабилизационных колесных пар, систему управления подвижным составом с комплексом программно-аппаратных средств, линейный тяговый двигатель, состоящий из пассивных элементов, закрепленных на ходовой балке монорельсовой транспортной системы, и активных элементов в виде индукторов, закрепленных на подвижном составе, систему электроснабжения МТС с контактной сетью и систему диспетчерского управления, отличающаяся тем, что на ходовой балке размещены радиочастотные метки, взаимодействующие со считывателями радиочастотных меток, размещенных на головном вагоне, на головном вагоне установлен радар, взаимодействующий с хвостовым вагоном ранее вышедшего из электродепо ЭПС, а ходовые тележки ЭПС снабжены системой магнитной разгрузки, содержащей электромагниты, взаимодействующие с внутренней горизонтальной поверхностью ходовой балки, электрооборудованием и системой управления подвижным составом, включающим в себя процессор управления, комплект преобразовательного оборудования для левого и правого бортов ходовой тележки, состоящий из преобразователя частоты и напряжения для линейных двигателей и блока регулятора тока электромагнитов левитации, а сама тележка оборудована датчиковой аппаратурой, включающей в себя датчики веса, датчики бокового давления, установленные на кронштейнах рамы ходовой тележки, датчики скорости и датчики контроля зазора между электромагнитами и поверхностью ходовой балки, при этом горизонтальные стабилизационные колесные пары закреплены на стабилизационной раме на оси с возможностью разворота и контактирования с датчиком бокового давления, в опорные колеса ходовой тележки встроены электромагнитные тормоза, а сама система управления ЭПС выполнена автоматизированной, связанной с системой управления движением (СУД) МТС в различных режимах движения, задавая требуемую скорость движения и команды на торможение, при этом СУД МТС - единая и взаимодействует со всеми электроподвижными составами, станциями, электродепо, регулирует движение ЭПС и взаимодействует с вспомогательными системами, координирует работу смежных систем управления в полуавтоматическом или автоматическом режимах, таких как управление движением линейного тягового двигателя ЭПС, системы стабилизации и системы магнитной разгрузки, микроклимата, приводов автоматических дверей, системы автоматического обнаружения и тушения пожаров, а сам комплекс программно-аппаратных средств АСУ ЭПС имеет трехуровневую резервированную иерархическую структуру с функциональным разделением на подсистемы, взаимодействующие по выделенным проводным и беспроводным каналам связи.
2. Монорельсовая транспортная система по п. 1, отличающаяся тем, что система электроснабжения МТС включает сеть тяговых трансформаторных подстанций, предназначенных для приема электроэнергии переменного тока частотой 50 Гц, напряжением 6/10 кВ от внешней сети с двумя независимыми источниками электрической энергии и преобразования ее в электроэнергию постоянного тока нагрузки до 2000 А, напряжением 600 В для питания контактной сети трассы монорельсовой транспортной системы с обеспечением контроля электрических параметров – тока, напряжения, мощности во всех режимах эксплуатации.
3. Монорельсовая транспортная система по п. 1, отличающаяся тем, что контактная токонесущая сеть выполнена в виде жесткого токопровода с тремя шинами, защищенными пластиковыми кожухами, две из которых служат для обеспечения электропитания линейного тягового двигателя, а одна шина - заземления.
4. Монорельсовая транспортная система по п. 3, отличающаяся тем, что крепление токопровода осуществляется на кронштейнах, приваренных к ходовой балке с помощью изолированных подвесов.
5. Монорельсовая транспортная система по п. 1, отличающаяся тем, что подвижной состав составляет 5-6 вагонов и все вагоны в составе обеспечивают перевозку пассажиров.
6. Монорельсовая транспортная система по п. 1, отличающаяся тем, что все вагоны электроподвижного состава имеют сквозной проход.
7. Монорельсовая транспортная система по п. 1, отличающаяся тем, что пассивные элементы тяговых линейных двигателей установлены симметрично на боковых поверхностях ходовой балки.
8. Монорельсовая транспортная система по п. 1, отличающаяся тем, что пассивные элементы установлены на боковых поверхностях короба ходовой балки с зазором по торцам 2-5 мм.
9. Монорельсовая транспортная система по п. 1, отличающаяся тем, что индукторы закреплены на стабилизационных рамах с помощью резьбовых соединений с демпфером в виде резиновых шайб.
10. Монорельсовая транспортная система по п. 1, отличающаяся тем, что зазор между активным и пассивным элементами составляет 12-21 мм.
11. Монорельсовая транспортная система по п. 1, отличающаяся тем, что поверхность индуктора, прилегающая с зазором к пассивному элементу, выполнена профилированной для бесконтактного прохождения поворотов эстакады.
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ПОДВИЖНЫМ СОСТАВОМ С ЛИНЕЙНЫМ ПРИВОДОМ | 2001 |
|
RU2180295C1 |
| ПОДВИЖНОЙ СОСТАВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2001 |
|
RU2188775C1 |
| Подвижной состав монорельсовой транспортной системы | 2021 |
|
RU2762708C1 |
| WO 2004026654 A1, 01.01.2004. | |||

