Изобретение относится к области транспорта и может использоваться для создания безопасных систем торможения на железных дорогах и в автомобилестроении, при создании блоков безопасного управления железнодорожных составов и автомобилей.
Задача контроля состояния тормозной системы транспортного средства ставилась многими авторами и нашла свое решение в целом ряде известных источников.
Так, в патенте США 7493805, G01M 17/00, 24.02.2009 г. для контроля тормозной системы железнодорожной платформы используются специальные высокоинерционные катки, первичные датчики и контроллер. Проверка требует вывести платформу из эксплуатации и в этом заключается основной недостаток данного технического решения.
В WO 2008124073, В60Т 7/12, 2008-10-16 описана система торможения, содержащая контроллер, который получив сигнал от акселерометра, сравнивает поведение транспортного средства с требуемым и корректирует сигнал, поступающий на привод тормозов. Подобная система, будучи исправной, может обеспечить заданные характеристики торможения, но не обладает средствами диагностики, что снижает ее надежность.
В US 6405117, В60Т 8/88, 2002-06-11 предлагается периодически измерять акселерометром ускорение транспортного средства и сопоставлять его в контроллере с положением педали тормоза и с аналогичными значениями для исправной системы торможения. Однако область применения данного устройства ограничена необходимостью выполнять резкое торможение для получения достоверных данных о текущем состоянии тормозов, в результате чего оно не может быть использовано для их периодического тестирования в рабочем режиме.
Тот же недостаток присущ устройству для контроля системы торможения автомобиля по патенту JP 2002308087 G01L 5/28; В60Т 17/22, 2002-10-23, в котором поочередно вывешивают колеса автомобиля, разгоняют до заданной скорости, прикладывают калиброванное тормозное усилие и соответствующими средствами контролируют изменение скорости колеса. Аналогичное техническое решение описано в патенте РФ 2180630, В60Т 17/22; G01M 17/00, 2002-03-20.
В US 2001024159, B60R 16/02; 2001-09-27 описана система торможения, в которой группа датчиков и контроллер сопоставляют положение педали газа, педали тормоза, ускорение автомобиля, интервал времени, прошедший с момента отпускания педали газа и формируют сигнал неисправности. При этом, хотя в устройстве и контролируется интервал времени в процессе торможения, сигнал неисправности формируется на основании сравнения величины ускорения с заданной. Вновь, как и в US 6405117, для определения исправности тормозной системы (тормозов и управляющей электроники) необходимо достичь определенной величины ускорения, то есть невозможно достоверно узнать состояние системы, не затормозив.
И, наконец, в JP 6199226, В60Т 8/90, 1994-07-19 описана система безопасного торможения, содержащая последовательно соединенные задатчик и управляющий процессор, выполненный с возможностью реализации алгоритмов проверки тормозной системы, а также управляемые процессором гидравлический исполнительный механизм. Данное устройство является наиболее близким к предложенному.
Недостатком данной системы, как и описанных выше, является то, что программа проверки запускается не в рабочем режиме и осуществляется с использованием дополнительного оборудования. Ее осуществление сопряжено с приложением значительных тормозных усилий. В результате проверка исправности тормозов транспортного средства в процессе его нормальной эксплуатации оказывается невозможной. Кроме того, возможности известной системы торможения ограничивает отсутствие информации о величине ускорения транспортного средства и средств для ее обработки и использования.
Таким образом, техническим результатом, ожидаемым от использования изобретения, является повышение безопасности системы торможения за счет возможности проверки состояния тормозов и исправности электронных цепей и механики непосредственно в процессе движения, в динамическом режиме и в реальном времени, а также за счет учета данных, поступающих по цепи обратной связи, о величине ускорения транспортного средства и принятия на их основе наиболее безопасного решения.
Указанный результат достигается тем, что система безопасного торможения, содержащая последовательно соединенные задатчик и управляющий процессор, выполненный с возможностью реализации алгоритмов проверки тормозной системы, а также исполнительный механизм, снабжена акселерометром, а управляющий процессор выполнен с возможностью определения интервала времени между командой торможения, формируемой задатчиком и соответствующим откликом на выходе акселерометра, подключенного ко второму входу управляющего процессора, и сравнения его с заданным значением интервала времени для формирования сигнала неисправности по результатам сравнения и/или изменения режима работы системы торможения.
Кроме того, процессор может быть выполнен с возможностью генерации тестовой последовательности команд торможения и выделения на фоне шумов среднего интервала времени, через которое на выходе акселерометра появляется соответствующая последовательность откликов.
При этом конструктивно акселерометр может быть установлен на плате управляющего процессора.
На фиг.1-2 приведены варианты блок-схемы предлагаемого устройства, на фиг.3 - временная диаграмма его работы.
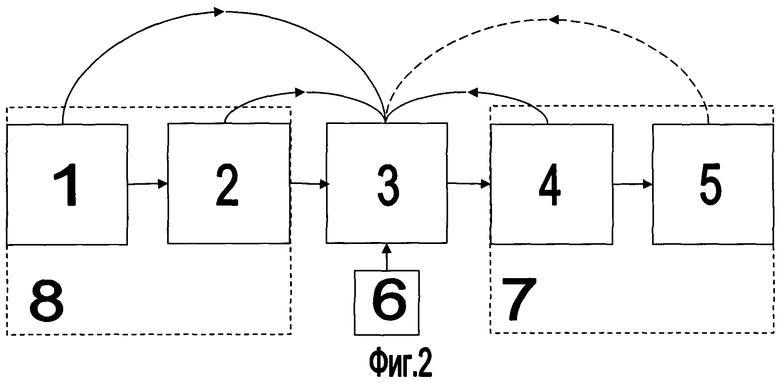
На фиг.1-2 обозначено:
1 - датчик приема внешней команды торможения/значения скорости движения
2 - формирователь команды
3 - управляющий процессор
4 - блок исполнительной электроники
5 - механизм торможения
6 - акселерометр
7 - исполнительный механизм
8 - задатчик системы безопасного торможения
9 - задатчик штатной системы управления
10 - контроллер штатной системы управления.
Рассмотрим два возможных варианта работы системы безопасного торможения.
Прежде всего, следует пояснить, что система безопасного торможения в целом и ее управляющий контроллер в частности предназначены для диагностики систем, узлов, механизмов и блоков транспортного средства и обеспечения его безопасности путем обнаружения неисправностей и реагирования на нештатные ситуации определенным образом. Рассматриваемые в данном решении средства диагностики только частично затрагивают описанное назначение системы безопасности, а именно - диагностику тормозных систем. Иными словами, описанный ниже алгоритм работы управляющего процессора 3 является составной частью общего алгоритма работы управляющего контроллера 3 и системы (блока) безопасности в целом.
В первом варианте задатчик 9 штатной системы управления передает на контроллер 10 штатной системы управления команду торможения, а контроллер 10 передает соответствующие управляющие сигналы на исполнительный механизм 7 (блок 4 исполнительной электроники). Тот же сигнал поступает с задатчика 9 штатной системы управления на вход задатчика 8 системы безопасного торможения, который транслирует команду на управляющий процессор 3 системы безопасного торможения, который, в свою очередь, определяет задержку между входным сигналом (командой торможения) и откликом, фиксируемым акселерометром 6, и сравнивает полученное значение с заданной величиной, хранящейся в памяти управляющего процессора 3. Если задержка тормозной системы больше допустимого значения, управляющий процессор 3 формирует соответствующий сигнал коррекции и/или индикации. Например, данный сигнал с выхода управляющего процессора 3 системы безопасного торможения может подаваться на вход контроллера 10, который и производит указанные действия. Как показано на фиг.1 пунктиром, команда торможения может поступать с задатчика 9 на формирователь команды 2 через датчик 1 приема внешней команды торможения. Все сказанное может относиться не к процессу (команде) торможения, а к значению скорости движения или заданному значению ускорения, которые также контролируются акселерометром 6 (в первом случае для этого на его выходе устанавливается интегратор).
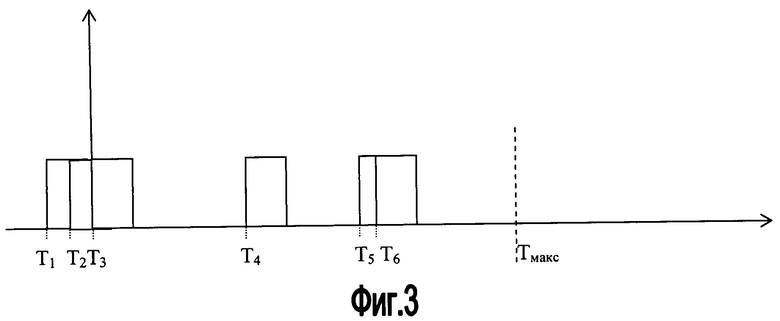
Второй вариант устройства (фиг.2) характеризуется тем, что все описанные функции реализуются одним управляющим процессором 3, который в данном случае осуществляет и управление транспортным средством в штатном режиме, включая ускорение, торможение, блокировку дверей в процессе движения и т.п., и диагностику исправности систем и их тестирование, т.е. выполняет функции блока безопасности.
В этом случае датчик 1 приема внешней команды торможения или значения скорости движения через формирователь команды 2 инициирует выработку управляющим процессором 3 последовательности тестовых команд торможения, а акселерометр 6 фиксирует отклик на эти команды, так что управляющий процессор 3 может произвести сравнение задержки отклика с заданной величиной. Выше задатчиком 8 или 9 назван блок, генерирующий команду торможения или ускорения в соответствии с любым алгоритмом, сигналом внешним или внутренним, поступающим по радиоканалу, от органов управления, таймера и т.п. Иными словами выполнение задатчика 8 в виде последовательного датчика 1 приема внешней команды торможения/значения скорости движения и формирователь команды 2 является только примером.
Следует пояснить также, что реализация заявленной системы безопасного торможения не исчерпывается двумя описанными вариантами, например в первом из рассмотренных вариантов (фиг.1) возможно одновременное наличие связи управляющего процессора 3 с блоком 4 исполнительной электроники и контроллера 10 штатной системы управления с тем же блоком (его другим входом или путем объединения двух управляющих сигналов по схеме ИЛИ). А во втором из рассмотренных вариантов (фиг.2) задатчик 8 может входить в состав управляющего процессора 3 и т.п.
Итак, основными параметрами процесса торможения в предложенном техническом решении являются Т макс - допустимое время задержки между выданной блоком 3 командой торможения и началом процесса торможения, и время Т исполнения. В свою очередь, Т исполнения определяется составляющими Т4 и Т5 соответствующих блоков. Параметр торможения Т макс и Т исполнения сравниваются. Максимально допустимое значение задержки торможения Т макс является ограничением сверху для Т исполнения в соответствии с нормативами безопасности. При известной скорости начала торможения может определяться необходимая кривая управления ускорением торможения для достижения заданного Т исполнения (с наименьшими пиковыми ускорениями, например, и выполнением условия наилучшего сцепления колес с рельсами, буксами, и т.п.).
Помимо Т макс интервал Т исполнения может сопоставляться с одним или несколькими предшествующими значениями того же параметра, а также с нормативным значением (это даст информацию о появлении неисправности в системе торможения или ухудшении ее параметров).
На фиг.3 схематично изображены задержки и интервалы срабатывания отдельных блоков. Так, в момент времени Т1 на датчик 1 приема внешней команды торможения/значения скорости движения поступает команда. Передний фронт импульса Т1 на фиг.3 отражает это событие. На переднем фронте импульса Т2 срабатывает формирователь 2 и на управляющий процессор 3 поступает управляющее воздействие и т.д. Таким образом, например, между моментом поступления команды на датчик 1 приема внешней команды торможения/значения скорости движения и появлением отклика на выходе акселерометра 6 пройдет время (Т6-Т1). Обычно, в известных системах торможения, предварительная диагностика проводится однократно, при проверке всех систем (выход состава на линию и т.п.). При этом контролируют цепи 1-3, 2-3, 4-3 (показаны дуговыми стрелками), что обычно не вызывает проблем, 5-3 (эта цепь показана пунктиром) - обычно контролировать сложнее.
В реальном времени, то есть в рабочем режиме контролируются только цепи 4-3, (реже 1-2-3). Этот режим контроля реализуют обычно кратковременным возбуждением командных цепей на время меньшее Т5 и соизмеримое с Т4 для проверки по активации цепей обратной связи блока 4. При этом никакой информации о текущем состоянии механизма торможения 5 (а также оценки Т исполнения, которая позволила бы сравнить его с Т макс или иным заданным значением То в реальном времени) тем более не происходит. В то время как Т4 и Т5 при диагностике могут дать определяющую информацию о работоспособности системы в целом.
Именно для решения этой задачи в систему введен акселерометр 6 (желательно находящийся непосредственно в управляющем процессоре 3 для исключения промежуточных элементов и связей) в качестве датчика обратной связи при торможении и тестах. При тестировании предлагается генерирование команды торможения управляющим процессором 3, например, в виде последовательности тестовых сигналов (длительность подбирается по минимально определяемому тормозному ускорению отклика с интервалами, выбранными для достижения устойчивой корреляции такой командной последовательности с сигналом от акселерометра 6 на фоне шумов). При этом определяют Т исполнения, и по девиации измеренного значения по сравнению с предварительно измеренным значением и Т макс - исправность и функциональность системы торможения. Само же тестовое торможение получается максимально щадящим для механизмов и практически незаметным для пассажиров.
Из сказанного выше ясно, что основными отличиями предложенной системы безопасного торможения является наличие акселерометра 6, установленного на плате управляющего процессора 3, а также выполнение самого управляющего процессора таким образом, чтобы реализуемый им алгоритм предполагал, наряду с обычным процессом передачи сигнала торможения по цепи 1-2-3-4-5, реализацию следующих алгоритмов:
- Коррекция величины управляющего воздействия. Процесс торможения осуществляется с использованием цепи 1-2-3-4-5 (фиг.2). В управляющем процессоре 3 заданная величина ускорения торможения Ао (соответствует текущему значению выходного кода формирователя команды 2) сопоставляется с текущим значением А (соответствует выходному сигналу акселерометра 6). Если А≠Ао, управляющий процессор 3 формирует сигнал рассогласования, поступающий на блок исполнительной электроники 4 и пропорциональный разнице А-Ао. В результате независимо от износа элементов механизма торможения 5 величина А будет равна заданной величине Ао.
- Диагностика системы торможения. Управляющий процессор 3, как правило, в отсутствие сигнала Ао на выходе формирователя команды 2, осуществляет подачу одного или нескольких коротких сигналов торможения с одинаковой или возрастающей амплитудой. Управляющий процессор 3 при этом определяет интервал между одноименными откликами, подаваемыми на вход блока исполнительной электроники 4 и поступающими с выхода акселерометра 6. Величина задержки свидетельствует о состоянии тормозной системы в целом.
- Учет дополнительных факторов. Управляющий процессор 3 анализирует и использует информацию с выхода акселерометра 6. Например, если акселерометр 6 регистрирует высокий вибрационный фон, диагностика не проводится или увеличивается заданное значение То. Далее, если на выходе формирователя команд 2 сигнал торможения присутствует, в частности сигнал на экстренное торможение, а от акселерометра 6 нет отклика соответствующей амплитуды, управляющий процессор 3 подключает дополнительные средства торможения и/или выдает соответствующий сигнал машинисту. Или в случае ударов по корпусу управляющего процессора 3 с акселерометром 6 или воздействия взрыва, схода вагона с рельс, регистрируемых акселерометром 6, система выдает соответствующие сигналы оператору и отключает блок исполнительной электроники 4 или переводит его в режим управления только с операторской станции. Попутно, благодаря акселерометру 6 учитывается влияние нештатных пиковых ускорений (столкновения, удары при сцепке и т.п.) на реальный ресурс системы.
Возможность корректировки тормозного усилия, диагностики всего тракта системы торможения непосредственно в рабочем режиме и возможность учета вышеперечисленных и других возможных возмущающих факторов позволяет повысить уровень безопасности движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЛОК БЕЗОПАСНОСТИ | 2010 |
|
RU2449900C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444454C1 |
| Способ диагностики и контроля тормозной сети поезда | 2019 |
|
RU2729907C1 |
| ХВОСТОВОЕ УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ ПОЕЗДА | 2021 |
|
RU2764478C1 |
| РЕГУЛЯТОР ЭЛЕКТРОДИНАМИЧЕСКОГО ТОРМОЗА ЛОКОМОТИВА | 2012 |
|
RU2510342C2 |
| Система управления торможением поезда | 2018 |
|
RU2707155C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| Способ ускоренного замера плотности тормозной сети поезда и устройство для его реализации | 2016 |
|
RU2709053C2 |
| Способ управления и диагностики тормозной системой поезда с применением технологии цифрового двойника и устройство для его реализации | 2022 |
|
RU2820579C2 |
Изобретение относится к области безопасных систем торможения на железных дорогах и в автомобилестроении. Система содержит задатчик (8), управляющий процессор (3), исполнительный механизм (7), акселерометр (6). Процессор выполнен с возможностью определения интервала времени между командой торможения, формируемой задатчиком и соответствующим откликом на выходе акселерометра, подключенного ко второму выходу управляющего процессора, и сравнения его с заданным значением интервала времени для формирования сигнала неисправности по результатам сравнения и/или изменения режима работы системы торможения. Достигается повышение безопасности системы торможения за счет возможности проверки состояния тормозов и исправности электронных цепей и механики, непосредственно в процессе движения, в динамическом режиме и в реальном времени, а также за счет учета данных, поступающих по цепи обратной связи о величине скорости транспортного средства и принятия на их основе наиболее безопасного решения. 2 з.п. ф-лы, 3 ил.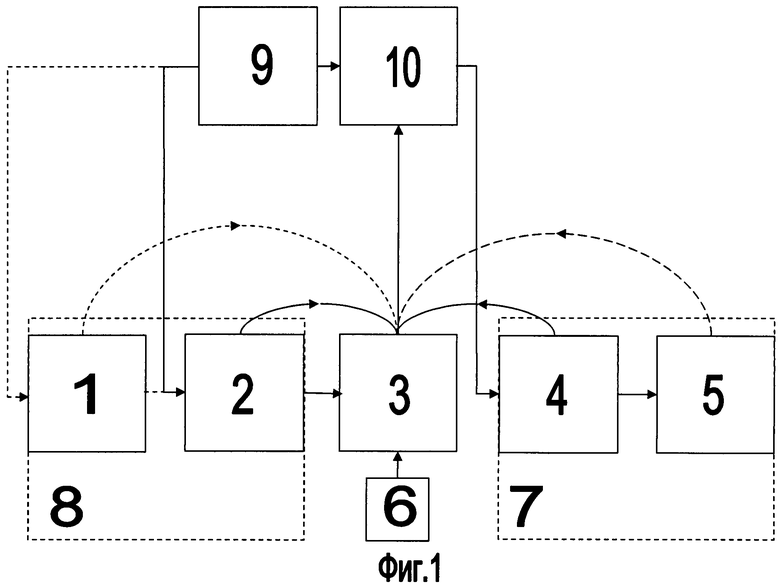
1. Система безопасного торможения, содержащая последовательно соединенные задатчик и управляющий процессор, выполненный с возможностью реализации алгоритмов проверки тормозной системы, а также исполнительный механизм, отличающаяся тем, что она снабжена акселерометром, а управляющий процессор выполнен с возможностью определения интервала времени между командой торможения, формируемой задатчиком и соответствующим откликом на выходе акселерометра, подключенного ко второму входу управляющего процессора, и сравнения его с заданным значением интервала времени для формирования сигнала неисправности по результатам сравнения и/или изменения режима работы системы торможения.
2. Система безопасного торможения по п.1, отличающаяся тем, что управляющий процессор выполнен с возможностью генерации тестовой последовательности команд торможения и выделения на фоне шумов среднего интервала времени, через которое на выходе акселерометра появляется соответствующая последовательность откликов.
3. Система безопасного торможения по п.1, отличающаяся тем, что конструктивно акселерометр установлен на плате управляющего процессора.
| КОНТРОЛЬ СОСТОЯНИЯ ТОРМОЗНОЙ СИСТЕМЫ | 2001 |
|
RU2284274C2 |
| JP 6199226 A, 19.07.1994 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИСПРАВНОСТИ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2331533C1 |
| Устройство управления торможением транспортного средства | 1986 |
|
SU1452474A3 |

