Изобретение относится к технической кибернетике и может быть использовано для управления периодическими режимами нестационарных динамических объектов, содержащих запаздывание по состоянию.
Наиболее близким техническим решением к предлагаемому является адаптивная система управления для динамических объектов с периодическими коэффициентами (Патент РФ №2265873. Официальный бюл. «Изобретения и полезные модели». - 2005, №34, прототип), содержащая блок задания коэффициентов, первый сумматор, первый умножитель, второй сумматор, блок задержки, последовательно соединенные второй умножитель и объект регулирования, выходы которого соединены с соответствующими входами блока задания коэффициентов, входы первого сумматора подключены к соответствующим выходам блока задания коэффициентов, первый вход второго сумматора подключен к выходу первого умножителя, второй вход - к выходу блока задержки, выход второго сумматора связан с первым входом второго умножителя и с входом блока задержки, выход первого сумматора соединен с первым и вторым входами первого умножителя и со вторым входом второго умножителя, выход второго умножителя подключен к входу объекта регулирования.
Однако недостатком данной системы является ее неработоспособность для объектов регулирования, содержащих известное временное запаздывание по состоянию.
Технической задачей, на решение которой направлено заявленное изобретение, является обеспечение асимптотической устойчивости положения равновесия рассматриваемой системы для объектов периодического действия, имеющих известное временное запаздывание по состоянию.
Решение поставленной задачи достигается за счет того, что в систему, содержащую блок задания коэффициентов, первый блок суммирования, первый умножитель, второй блок суммирования, блок задержки, последовательно соединенные второй умножитель и объект регулирования, согласно изобретению дополнительно введены второй блок задержки, второй блок задания коэффициентов, блок запаздывания, третий, четвертый и пятый блоки суммирования, третий и четвертый умножители, при этом выходы объекта регулирования соединены с соответствующими входами первого блока задания коэффициентов, а также с входами блока запаздывания, выходы которого подключены к соответствующим входам второго блока задания коэффициентов, выходы первого блока задания коэффициентов соединены с соответствующими входами первого блока суммирования, выход первого блока суммирования подключен к первому и второму входу первого умножителя, а также к второму входу второго умножителя, выход первого умножителя связан с первым входом второго блока суммирования, второй вход второго блока суммирования подключен к выходу первого блока задержки, выход второго блока суммирования подключен к первому входу второго умножителя и к входу первого блока задержки, выход второго умножителя соединен с первым входом третьего блока суммирования, выход второго блока задания коэффициентов подключен к соответствующим входам четвертого блока суммирования, выход которого подключен к первому и второму входам третьего умножителя и к второму входу четвертого умножителя, выход третьего умножителя соединен с первым входом пятого блока суммирования, второй вход которого связан с выходом второго блока задержки, выход пятого блока суммирования соединен с первым входом четвертого умножителя, а также с входом второго блока задержки, выход четвертого умножителя подключен к второму входу третьего блока суммирования, выход третьего блока суммирования соединен с входом объекта регулирования.
Сущность изобретения поясняется чертежом, где представлена блок-схема системы. Система содержит объект регулирования 1, первый блок задания коэффициентов 2, первый блок суммирования 3, первый умножитель 4, второй блок суммирования 5, первый блок задержки 6, второй умножитель 7, третий блок суммирования 8, блок запаздывания 9, второй блок задания коэффициентов 10, четвертый блок суммирования 11, третий умножитель 12, пятый блок суммирования 13, второй блок задержки 14, четвертый умножитель 15, y1,…,ym - выходы объекта регулирования, u - скалярное управляющее воздействие.
Объект регулирования описывается уравнением:

где x(t) - n-мерный вектор состояний объекта регулирования;
A(t+Т), D(t+Т), b(t+Т) - соответственно нестационарные матрица состояния, матрица с запаздывающим аргументом и вектор управления, элементы которых являются T-периодическими функциями времени;
y(t) - m-мерный вектор выходных координат объекта регулирования;
∗ - символ транспонирования;
L - матрица выхода;
τ - известное временное запаздывание;
u(t) - скалярное управляющее воздействие, удовлетворяющее соотношению:

где χперi(t) - настраиваемые периодические коэффициенты контура адаптации  ;
;
α0, β0 - m-мерные векторы коэффициентов первого 2 и второго 10 блоков задания коэффициентов соответственно, выбираемые из условия:
 ,
,  - гурвицевы полиномы степени n-1 с положительными старшими коэффициентами, где α(λ) - числитель передаточной функции объекта регулирования (1);
- гурвицевы полиномы степени n-1 с положительными старшими коэффициентами, где α(λ) - числитель передаточной функции объекта регулирования (1);
Используя методику критерия гиперустойчивости В.М.Попова, можно показать, что обеспечение асимптотической устойчивости системы регулирования достигается за счет определения настроек регулятора (2) в виде:


где γ0, γ1=const>0.
Система функционирует следующим образом.
Сигналы с выходов объекта регулирования 1 идут на соответствующие входы первого блока задания коэффициентов 2 и на входы блока задержки 9. Внутри первого блока задания коэффициентов 2 происходит умножение сигнала с i-го входа на постоянный коэффициент. Выходные сигналы первого блока задания коэффициентов 2 поступают на соответствующие входы первого блока суммирования 3, где складываются. Сигнал с выхода первого блока суммирования 3 идет на первый и второй входы первого умножителя 4, а также на второй вход второго умножителя 7. Выходной сигнал первого умножителя 4 поступает на первый вход второго блока суммирования 5. На второй вход второго блока суммирования 5 подается сигнал с выхода первого блока задержки 6. Сигнал с выхода второго блока суммирования 5 идет на вход первого блока задержки 6 и на первый вход второго умножителя 7, выходной сигнал которого подается на первый вход третьего блока суммирования 8. Выходные сигналы блока задержки на величину τ 9 поступают на соответствующие входы второго блока задания коэффициентов 10, внутри которого умножаются на соответствующие постоянные коэффициенты. Выходные сигналы блока задания коэффициентов 10 подаются на соответствующие входы четвертого блока суммирования 11, где складываются. Сигнал с выхода четвертого блока суммирования идет на первый и второй входы третьего умножителя 12 и на второй вход четвертого умножителя 15. Выходной сигнал третьего умножителя 12 подается на первый вход пятого блока суммирования 13, на второй вход которого идет сигнал с выхода второго блока задержки 14. Сигнал с выхода пятого блока суммирования 13 поступает на первый вход четвертого умножителя 15, а также на вход второго блока задержки 14. Выходной сигнал четвертого умножителя 15 подается на второй вход третьего блока суммирования 8. Сигнал с выхода третьего блока суммирования 8 поступает на вход объекта регулирования 1.
Технический результат заключается в обеспечении асимптотической устойчивости положения равновесия системы для объектов периодического действия, имеющих известное временное запаздывание по состоянию.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
Изобретение относится к технической кибернетике и может быть использовано для управления периодическими режимами нестационарных динамических объектов, содержащих запаздывание по состоянию. Технический результат заключается в обеспечении асимптотической устойчивости положения равновесия рассматриваемой системы для объектов периодического действия, имеющих известное временное запаздывание по состоянию. Он достигается тем, что в систему, содержащую блок задания коэффициентов, первый блок суммирования, первый умножитель, второй блок суммирования, блок задержки, последовательно соединенные второй умножитель и объект регулирования, дополнительно введены второй блок задержки, второй блок задания коэффициентов, блок запаздывания, третий, четвертый и пятый блоки суммирования, третий и четвертый умножители. 1 ил.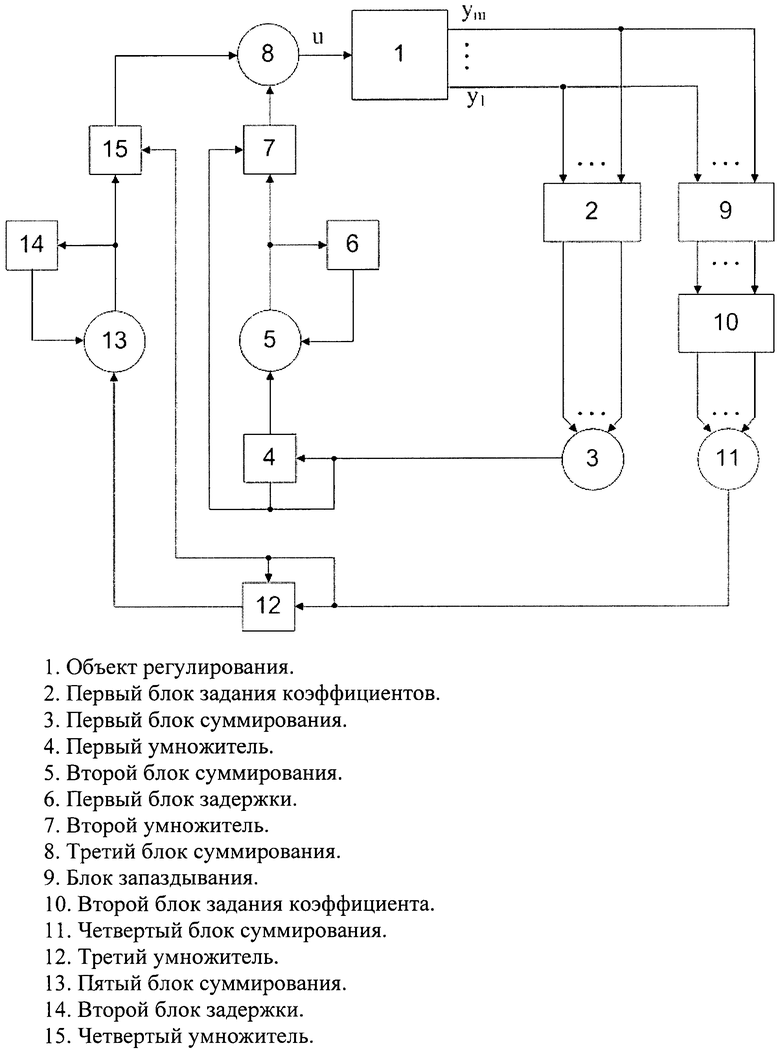
Адаптивная система управления для динамических объектов с периодическими коэффициентами и запаздыванием, содержащая блок задания коэффициентов, первый блок суммирования, первый умножитель, второй блок суммирования, блок задержки, последовательно соединенные второй умножитель и объект регулирования, отличающаяся тем, что дополнительно введены второй блок задержки, второй блок задания коэффициентов, блок запаздывания, третий, четвертый и пятый блоки суммирования, третий и четвертый умножители, при этом выходы объекта регулирования соединены с соответствующими входами первого блока задания коэффициентов, а также с входами блока запаздывания, выходы которого подключены к соответствующим входам второго блока задания коэффициентов, выходы первого блока задания коэффициентов соединены с соответствующими входами первого блока суммирования, выход первого блока суммирования подключен к первому и второму входам первого умножителя, а также к второму входу второго умножителя, выход первого умножителя связан с первым входом второго блока суммирования, второй вход второго блока суммирования подключен к выходу первого блока задержки, выход второго блока суммирования подключен к первому входу второго умножителя и к входу первого блока задержки, выход второго умножителя соединен с первым входом третьего блока суммирования, выход второго блока задания коэффициентов подключен к соответствующим входам четвертого блока суммирования, выход которого подключен к первому и второму входам третьего умножителя и к второму входу четвертого умножителя, выход третьего умножителя соединен с первым входом пятого блока суммирования, второй вход которого связан с выходом второго блока задержки, выход пятого блока суммирования соединен с первым входом четвертого умножителя, а также с входом второго блока задержки, выход четвертого умножителя подключен к второму входу третьего блока суммирования, выход третьего блока суммирования соединен с входом объекта регулирования.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ С ПЕРИОДИЧЕСКИМИ КОЭФФИЦИЕНТАМИ | 2004 |
|
RU2265873C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 2000 |
|
RU2178197C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ НЕЙТРАЛЬНОГО ТИПА | 1998 |
|
RU2148269C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЭЛЕКТРИЧЕСКОГО ТОКА В ЭЛЕКТРОЛИТИЧЕСКОЙ ЯЧЕЙКЕ | 0 |
|
SU180669A1 |

