Изобретение относится к автоматике и может быть использовано в системах управления объектами с известным запаздыванием, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины, а измерению доступен только выходной сигнал объекта, но не его производные.
Наиболее близким техническим решением к предлагаемому является самонастраивающаяся система управления для астатических объектов с запаздыванием по управлению [Патент RU 2282883 МПК Cl G05B 13/02, 2006.01], содержащая объект регулирования, первый блок задания коэффициентов, первый сумматор, первый умножитель, первый интегратор, второй умножитель, второй сумматор, второй интегратор, второй блок задания коэффициентов, третий сумматор, третий умножитель, третий интегратор, четвертый умножитель, четвертый сумматор, блок задержки, фильтр переменных состояния, блок линейной части адаптивного регулятора, входы первого сумматора подключены к соответствующим выходам первого блока задания коэффициентов, второй вход второго сумматора подключен к выходу блока задержки, третий вход второго сумматора связан с выходом второго блока задания коэффициентов, выход второго сумматора подключен к входу второго интегратора, выход которого подключен к первому входу третьего сумматора и к входу второго блока задания коэффициентов, второй вход третьего сумматора связан с выходом первого сумматора, выход третьего сумматора соединен с вторым входом первого умножителя и с первым входом третьего умножителя, второй вход третьего умножителя подключен к выходу первого сумматора, выход третьего умножителя подключен к входу третьего интегратора, выход третьего интегратора соединен с первым входом четвертого умножителя, второй вход четвертого умножителя связан с выходом первого сумматора, выход четвертого умножителя связан с вторым входом четвертого сумматора, а первый вход четвертого сумматора связан с выходом второго умножителя, выход четвертого сумматора подключен к входу блока задержки, входу объекта регулирования и к первому входу второго сумматора, выход блока задержки подключен к второму входу второго сумматора, второму входу второго умножителя и к первому входу первого умножителя, на вход блока линейной части адаптивного регулятора поступает сигнал с выхода четвертого сумматора, выход линейной части адаптивного регулятора соединен с входом объекта управления, выход объекта управления поступает на фильтр переменных состояния, выходы фильтра переменных состояния подаются на соответствующие входы первого блока задания коэффициентов.
Недостатком этой системы является низкое качество регулирования вследствие невозможности точной настройки основного и дополнительного контуров управления.
Задачей изобретения является расширение функциональных возможностей системы, т.е. повышение качества регулирования за счет использования специальным образом организованного контура управления.
Сущность изобретения состоит в том, что в самонастраивающуюся систему управления для астатических объектов с запаздыванием по управлению, содержащую объект регулирования, первый блок задания коэффициентов, первый сумматор, первый умножитель, первый интегратор, второй умножитель, второй сумматор, второй интегратор, второй блок задания коэффициентов, третий сумматор, четвертый сумматор, блок задержки, линейную часть адаптивного регулятора, входы первого сумматора подключены к соответствующим выходам первого блока задания коэффициентов, третий вход второго сумматора связан с выходом второго блока задания коэффициентов, выход второго сумматора подключен к входу второго интегратора, выход которого подключен к первому входу третьего сумматора и к входу второго блока задания коэффициентов, второй вход третьего сумматора связан с выходом первого сумматора, выход третьего сумматора соединен с вторым входом первого умножителя, а первый вход четвертого сумматора связан с выходом второго умножителя, выход четвертого сумматора подключен к входу блока задержки, входу линейной части адаптивного регулятора и к первому входу второго сумматора, выход линейной части адаптивного регулятора подключен к входу объекта регулирования, выход блока задержки подключен к второму входу второго сумматора, второму входу второго умножителя и к первому входу первого умножителя, дополнительно вводится наблюдатель, изменяется структура основного контура регулирования, вводится пятый сумматор, первый блок настройки, при этом выходы первого блока настройки связаны с последующими входами четвертого сумматора, выход третьего сумматора связан в первым входом первого блока настройки, выходы наблюдателя связаны с последующими входами первого блока настройки и с соответствующими входами первого блока задания коэффициентов, выход первого сумматора связан с первым входом пятого сумматора, выход объекта регулирования связан со вторым входом пятого, выход пятого сумматора связан со вторым входом наблюдателя, выход блока линейной части адаптивного регулятора связан с первым входом наблюдателя.
На фиг.1 представлена блок-схема предлагаемой системы, на фиг.2 - схема первого блока настройки, на фиг.3 - схема наблюдателя, на фиг.4 - схема блока 23, на фиг.5 - схема блока 24.
Система содержит объект регулирования 1, первый блок задания коэффициентов 2, первый сумматор 3, первый умножитель 4, первый интегратор 5, второй умножитель 6, второй сумматор 7, второй интегратор 8, второй блок задания коэффициентов 9, третий сумматор 10, первый блок настройки 11, четвертый сумматор 12, пятый сумматор 13, блок задержки 14, наблюдатель 15, блок линейной части адаптивного регулятора 16; первый блок настройки 11 содержит третьи умножители 17, третьи интеграторы 18, четвертые умножители 19; наблюдатель 15 содержит второй блок настройки 23, третий блок задания коэффициентов 21, четвертый блок задания коэффициентов 22, шестой сумматор 20; второй блок настройки содержит блоки суммирования и интегрирования 24; блоки суммирования и интегрирования 24 состоят из седьмых сумматоров 25 и четвертых интеграторов 26.
Объект регулирования описывается уравнением

где p=d/dt, - оператор дифференцирования, ϕ(t)∈R - скалярный выход объекта, τ=const>0 - известное постоянное запаздывание, α(р), ω(р) - соответственно числитель и знаменатель передаточной функции объекта управления, degω(р)=n - порядок полинома знаменателя передаточной функции объекта управления, degα(p)=m - порядок полинома числителя передаточной функции объекта управления, φ(t)∈R - скалярное управляющее воздействие.
Выражение (1) можно представить в эквивалентной форме в виде передаточной функции:

или в уравнениях пространства состояний:


где А, В, СT - матрица и векторы, соответственно, размеров n×n, 1×n, n×1, удовлетворяющие выражению α(p)/ω(p)=CT·(p·Е-А)-1·В, x(t) - n-мерный вектор переменных состояния объекта регулирования (1), Е - единичная матрица размера n×n.
Управляющее воздействие α(t) формируется с помощью адаптивного регулятора, состоящего из линейной и нелинейной части

где u(t)- выход нелинейной части, WL(p) - передаточная функция линейной части адаптивного регулятора, которая в данном случае имеет вид реального дифференцирующего звена

где К>0, Т>0 - соответственно коэффициент усиления и постоянная времени реального дифференцирующего звена.
Выход нелинейной части u(t) формируется следующим образом

где  - оценка i-го значения n-мерного вектора xi(t); χi(t), k(t) - алгоритмы настройки, полученные на основе критерия гиперустойчивости вида:
- оценка i-го значения n-мерного вектора xi(t); χi(t), k(t) - алгоритмы настройки, полученные на основе критерия гиперустойчивости вида:
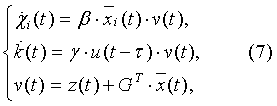
где β>0 - число, γ>0 - число, z(t) - выход дополнительного контура, динамика которого описывается уравнением

где a0>0 - число, задающее желаемое качество регулирования.
Оценку переменных состояния объекта регулирования (3) получают с помощью наблюдателя, имеющего следующую структуру


 ,
,
где N - вектор, обеспечивающий желаемый темп устранения невязки  выбирается так, чтобы полюса наблюдателя (7) располагались на больше чем трехкратном расстоянии от полюсов объекта регулирования (3); АM, ВM - матрица и вектор, соответственно, размеров n×n и 1×n, GT - вектор размера 1×n, которые выбираются из условия
выбирается так, чтобы полюса наблюдателя (7) располагались на больше чем трехкратном расстоянии от полюсов объекта регулирования (3); АM, ВM - матрица и вектор, соответственно, размеров n×n и 1×n, GT - вектор размера 1×n, которые выбираются из условия

Структуру (9) реализует блок 15, первое уравнение в структуре (7) реализуется блоком 11, линейная часть адаптивного регулятора (5) реализуется звеном 16.
Система функционирует следующим образом.
Сигнал Ui=ϕ с выхода объекта регулирования 1 поступает на второй вход пятого сумматора 13, с выхода пятого сумматора 13 сигнал  поступает на второй вход наблюдателя 15, сигналы
поступает на второй вход наблюдателя 15, сигналы  с выходов наблюдателя 15 поступают на соответствующие входы первого блока настройки 11 и на соответствующие входы блока задания коэффициентов 2. В блоке задания коэффициентов 2 происходит умножение оценок переменных состояния объекта регулирования
с выходов наблюдателя 15 поступают на соответствующие входы первого блока настройки 11 и на соответствующие входы блока задания коэффициентов 2. В блоке задания коэффициентов 2 происходит умножение оценок переменных состояния объекта регулирования  на постоянные коэффициенты вектора GT. Сигналы с выходов блока задания коэффициентов 2 поступают на соответствующие входы первого сумматора 3. Сигнал
на постоянные коэффициенты вектора GT. Сигналы с выходов блока задания коэффициентов 2 поступают на соответствующие входы первого сумматора 3. Сигнал  с выхода блока суммирования 3 приходит на второй вход третьего сумматора 10 и на первый вход пятого сумматора 13, сигнал
с выхода блока суммирования 3 приходит на второй вход третьего сумматора 10 и на первый вход пятого сумматора 13, сигнал  с выхода третьего сумматора 10 подается на второй вход первого умножителя 4 и на первый вход первого блока настройки 11, сигнал
с выхода третьего сумматора 10 подается на второй вход первого умножителя 4 и на первый вход первого блока настройки 11, сигнал  с выхода первого умножителя 4 поступает на вход первого интегратора 5, сигнал
с выхода первого умножителя 4 поступает на вход первого интегратора 5, сигнал  с выхода первого интегратора 5 поступает на первый вход второго умножителя 6, сигнал
с выхода первого интегратора 5 поступает на первый вход второго умножителя 6, сигнал  с выхода второго умножителя 6 подается на первый вход четвертого сумматора 12, сигналы
с выхода второго умножителя 6 подается на первый вход четвертого сумматора 12, сигналы  с выхода первого блока настройки 11 поступает на последующие входы четвертого сумматора 12, сигнал
с выхода первого блока настройки 11 поступает на последующие входы четвертого сумматора 12, сигнал  с выхода четвертого сумматора 12 идет на вход блока линейной части адаптивного регулятора 17, на первый вход второго сумматора 7 и на вход блока задержки 14, сигнал
с выхода четвертого сумматора 12 идет на вход блока линейной части адаптивного регулятора 17, на первый вход второго сумматора 7 и на вход блока задержки 14, сигнал  с выхода блока задержки 14 идет на второй вход второго сумматора 7, на первый вход первого умножителя 4 и на второй вход второго умножителя 6, сигнал
с выхода блока задержки 14 идет на второй вход второго сумматора 7, на первый вход первого умножителя 4 и на второй вход второго умножителя 6, сигнал  с выхода второго сумматора 7 подается на вход второго интегратора 8, сигнал
с выхода второго сумматора 7 подается на вход второго интегратора 8, сигнал  с выхода второго интегратора 8 подается на первый вход третьего сумматора 10 и на вход второго блока задания коэффициентов 9, сигнал
с выхода второго интегратора 8 подается на первый вход третьего сумматора 10 и на вход второго блока задания коэффициентов 9, сигнал  с выхода второго блока задания коэффициентов 9 поступает на третий вход второго сумматора 7, сигнал
с выхода второго блока задания коэффициентов 9 поступает на третий вход второго сумматора 7, сигнал  c выхода линейной части адаптивного регулятора 16 подается на вход объекта регулирования 1 и на первый вход наблюдателя 15.
c выхода линейной части адаптивного регулятора 16 подается на вход объекта регулирования 1 и на первый вход наблюдателя 15.
На фиг.2 представлена схема первого блока настройки 11.
Первый блок настройки состоит из третьих умножителей, третьих интеграторов, четвертых умножителей, при этом первые входы третьих умножителей связаны с выходами третьих сумматоров, вторые входы третьих умножителей и вторые входы четвертых умножителей связаны с соответствующими выходами наблюдателя, выходы третьих умножителей связаны с входами третьих интеграторов, выходы третьих интеграторов связаны с первыми входами четвертых умножителей, выходы четвертых умножителей связаны с соответствующими входами четвертых сумматоров. Первый блок настройки 11 функционирует следующим образом: сигналы  с выходов третьих умножителей 17 подаются на входы третьих интеграторов 18, сигналы
с выходов третьих умножителей 17 подаются на входы третьих интеграторов 18, сигналы  с выходов третьих интеграторов 18 подаются на первые входы четвертых умножителей 19, сигналы
с выходов третьих интеграторов 18 подаются на первые входы четвертых умножителей 19, сигналы  с выходов четвертых умножителей подаются на соответствующие входы четвертых сумматоров 12.
с выходов четвертых умножителей подаются на соответствующие входы четвертых сумматоров 12.
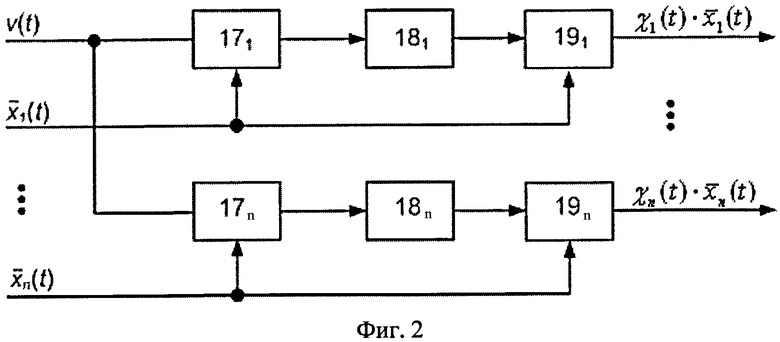
На фиг.3 представлена схема наблюдателя 15, на фиг.4 - схема блока 23, на фиг.5 - схема блока 24.
Наблюдатель 15 состоит из второго блока настройки, третьего блока задания коэффициентов, четвертого блока задания коэффициентов, шестого сумматора, при этом входы четвертого блока задания коэффициентов связаны с соответствующими выходами второго блока настройки, первый вход шестого сумматора связан с выходом четвертого сумматора, последующие входы шестого сумматора связаны с соответствующими выходами четвертого блока задания коэффициентов, вход третьего блока задания коэффициентов связан с выходом пятого сумматора, первый вход второго блока настройки связан с выходом шестого сумматора, последующие входы второго блока настройки связаны с соответствующими выходами третьего блока задания коэффициентов.
Второй блок настройки состоит из блоков суммирования и интегрирования, при этом выход предыдущего блока суммирования и интегрирования является входом для последующего блока суммирования и интегрирования. Блоки суммирования и интегрирования состоят из четвертых умножителей и седьмых сумматоров, при этом входы четвертых интеграторов связаны с выходами седьмых сумматоров.
Наблюдатель 15 функционирует следующим образом: сигналы  с выходов второго блока настройки 23 подаются на четвертый блок задания коэффициентов 22. В блоке задания коэффициентов 22 происходит умножение сигналов
с выходов второго блока настройки 23 подаются на четвертый блок задания коэффициентов 22. В блоке задания коэффициентов 22 происходит умножение сигналов  блока 23 на соответствующие коэффициенты
блока 23 на соответствующие коэффициенты  n-ой строки матрицы АM. Сигналы
n-ой строки матрицы АM. Сигналы  с выходов четвертого блока задания коэффициентов 22 поступают на соответствующие входы шестого сумматора 20. Сигнал
с выходов четвертого блока задания коэффициентов 22 поступают на соответствующие входы шестого сумматора 20. Сигнал 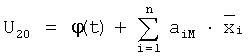 выхода шестого сумматора 20 поступает на первый вход второго блока настройки 23. В третьем блоке задания коэффициентов 21 происходит перемножение сигнала
выхода шестого сумматора 20 поступает на первый вход второго блока настройки 23. В третьем блоке задания коэффициентов 21 происходит перемножение сигнала  на соответствующие коэффициенты вектора N, сигналы
на соответствующие коэффициенты вектора N, сигналы  с выходов третьего блока задания коэффициентов 21 подаются на соответствующие входы второго блока настройки 22.
с выходов третьего блока задания коэффициентов 21 подаются на соответствующие входы второго блока настройки 22.
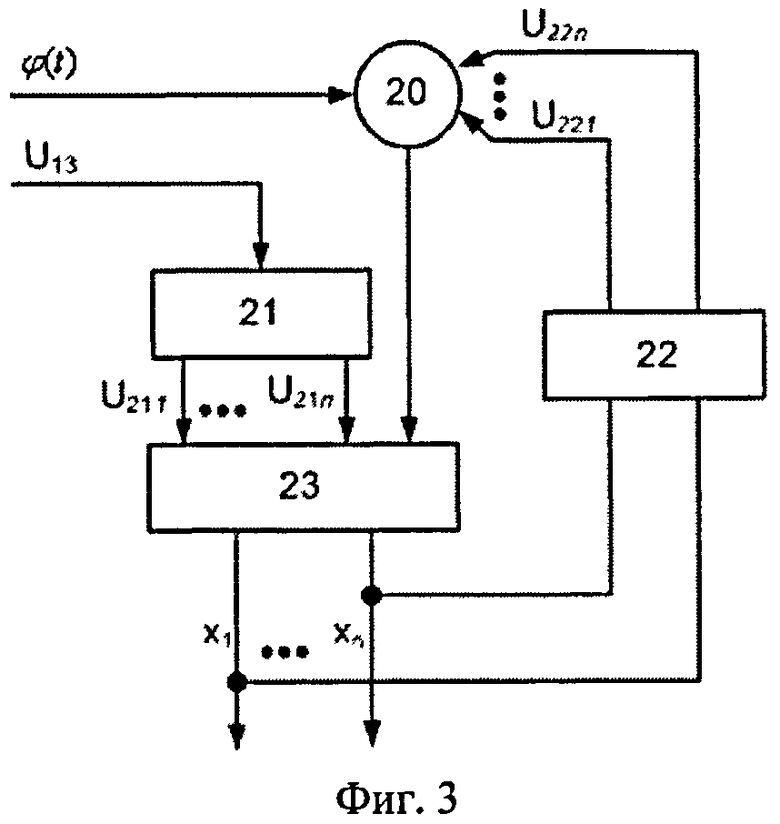
Второй блок настройки функционирует следующим образом: на вход  i-го блока суммирования и интегрирования 24i подается сигнал с выхода предыдущего блока суммирования и интегрирования
i-го блока суммирования и интегрирования 24i подается сигнал с выхода предыдущего блока суммирования и интегрирования  (i-1)-го блока 24i-1 (на вход первого блока суммирования и интегрирования (при i=0) подается сигнал c выхода шестого сумматора 20).
(i-1)-го блока 24i-1 (на вход первого блока суммирования и интегрирования (при i=0) подается сигнал c выхода шестого сумматора 20).
Блок суммирования и интегрирования функционирует следующим образом: на первый вход седьмого сумматора 25 подается сигнал  с выхода пятого сумматора 17, на второй вход седьмого сумматора 25 подается сигнал
с выхода пятого сумматора 17, на второй вход седьмого сумматора 25 подается сигнал  с выхода предыдущего блока суммирования и интегрирования 24i-1. Сигнал
с выхода предыдущего блока суммирования и интегрирования 24i-1. Сигнал  с выхода седьмого сумматора 25 подается на четвертый умножитель 26.
с выхода седьмого сумматора 25 подается на четвертый умножитель 26.
Технический результат заключается в том, что, вводя в систему наблюдатель, пятый сумматор, первый блок настройки, получают в системе новую функцию, которая заключается в том, что теперь повышается качество регулирования за счет использования специальным образом организованного контура управления.
Данное устройство может быть реализовано промышленным способом, на основе стандартной элементной базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437136C2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2282883C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С НАБЛЮДАТЕЛЕМ ПЕРЕМЕННЫХ СОСТОЯНИЯ ДЛЯ ОБЪЕКТА С ЗАПАЗДЫВАНИЯМИ | 2013 |
|
RU2541097C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2013 |
|
RU2513847C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2459226C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ НЕЙТРАЛЬНОГО ТИПА | 1998 |
|
RU2148269C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 1998 |
|
RU2130636C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2152067C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2468406C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2005 |
|
RU2288496C1 |


Изобретение относится к автоматике и может быть использовано в системах управления объектами с известным запаздыванием, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины, а измерению доступен только выходной сигнал объекта. Технический результат заключается в том, что повышается качество регулирования путем использования специальным образом организованного контура управления. Система содержит объект регулирования, два блока задания коэффициентов, пять сумматоров, два умножителя, два интегратора, блок задержки, линейную часть адаптивного регулятора, блок настройки, наблюдатель. 1 з.п. ф-лы, 5 ил.
1. Самонастраивающаяся система управления для астатических объектов с запаздыванием по управлению, содержащая объект регулирования, первый блок задания коэффициентов, первый сумматор, первый умножитель, первый интегратор, второй умножитель, второй сумматор, второй интегратор, второй блок задания коэффициентов, третий сумматор, четвертый сумматор, блок задержки, линейную часть адаптивного регулятора, входы первого сумматора подключены к соответствующим выходам первого блока задания коэффициентов, третий вход второго сумматора связан с выходом второго блока задания коэффициентов, выход второго сумматора подключен к входу второго интегратора, выход которого подключен к первому входу третьего сумматора и к входу второго блока задания коэффициентов, второй вход третьего сумматора связан с выходом первого сумматора, выход третьего сумматора соединен с вторым входом первого умножителя, а первый вход четвертого сумматора связан с выходом второго умножителя, выход четвертого сумматора подключен к входу блока задержки, входу линейной части адаптивного регулятора и к первому входу второго сумматора, выход блока задержки подключен ко второму входу второго сумматора, второму входу второго умножителя и к первому входу первого умножителя, выход блока линейной части адаптивного регулятора связан с входом объекта регулирования, отличающаяся тем, что в систему дополнительно вводятся наблюдатель, пятый сумматор, первый блок настройки, при этом выходы первого блока настройки связаны с последующими входами четвертого сумматора, выход третьего сумматора связан с первым входом первого блока настройки, выходы наблюдателя связаны с последующими входами первого блока настройки и с соответствующими входами первого блока задания коэффициентов, выход первого сумматора связан с первым входом пятого сумматора, выход объекта регулирования связан со вторым входом пятого сумматора, выход пятого сумматора связан со вторым входом наблюдателя, выход линейной части адаптивного регулятора связан с первым входом наблюдателя.
2. Самонастраивающаяся система управления для астатических объектов с запаздыванием по управлению по п.1, в которой первый блок настройки состоит из третьих умножителей, третьих интеграторов, четвертых умножителей, при этом первые входы третьих умножителей связаны с выходом третьего сумматора, вторые входы третьих умножителей и вторые входы четвертых умножителей связаны с соответствующими выходами наблюдателя, выходы третьих умножителей связаны с входами третьих интеграторов, выходы третьих интеграторов связаны с первыми входами четвертых умножителей, выходы четвертых умножителей связаны с соответствующими входами четвертых сумматоров, наблюдатель состоит из второго блока настройки, третьего блока задания коэффициентов, четвертого блока задания коэффициентов, шестого сумматора, при этом входы четвертого блока задания коэффициентов связаны с соответствующими выходами второго блока настройки, первый вход шестого сумматора связан с выходом четвертого сумматора, последующие входы шестого сумматора связаны с соответствующими выходами четвертого блока задания коэффициентов, вход третьего блока задания коэффициентов связан с выходом пятого сумматора, первый вход второго блока настройки связан с выходом шестого сумматора, последующие входы второго блока настройки связаны с соответствующими выходами третьего блока задания коэффициентов, второй блок настройки состоит из блоков суммирования и интегрирования, при этом выход предыдущего блока суммирования и интегрирования является входом для последующего блока суммирования и интегрирования, блоки суммирования и интегрирования состоят из четвертых умножителей и седьмых сумматоров, при этом входы четвертых интеграторов связаны с выходами седьмых сумматоров.
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2281541C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2222040C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Следящий электропривод с переменным моментом инерции | 1983 |
|
SU1141375A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1105860A1 |
| Адаптивная система управления | 1988 |
|
SU1578696A2 |
| US 5301101 А, 05.04.1994 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЭЛЕКТРИЧЕСКОГО ТОКА В ЭЛЕКТРОЛИТИЧЕСКОЙ ЯЧЕЙКЕ | 0 |
|
SU180669A1 |

