Изобретение относится к автоматике и может быть использовано в системах управления астатическими объектами, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины, а измерению доступен только выходной сигнал объекта, но не его производные.
Наиболее близким техническим решением к предлагаемому является самонастраиваюшаяся система управления для объектов с запаздыванием по управлению [Патент RU 2210800, МКИ 7 G 05 В 13/02, 2003], содержащая объект регулирования, первый блок задания коэффициентов, первый сумматор, первый умножитель, первым интегратор, второй умножитель, второй сумматор, второй интегратор, второй блок задания коэффициентов, третий сумматор, третий умножитель, третий интегратор, четвертый умножитель, четвертый сумматор, блок задержки на величину τ, при этом выходы объекта регулирования соединены с соответствующими входами первого блока задания коэффициентов, входы первого сумматора подключены к соответствующим выходам первого блока задания коэффициентов, первый вход второго сумматора подключен к выходу четвертого сумматора, второй вход второго сумматора подключен к выходу блока задержки, третий вход второго сумматора связан с выходом второго блока задания коэффициентов, выход второго сумматора подключен к входу второго, интегратора, выход которого подключен к первому входу третьего сумматора и к входу второго блока задания коэффициентов, второй вход третьего сумматора связан с выходом первого сумматора, выход третьего сумматора соединен со вторым входом первого умножителя и с первым входом третьего умножителя, второй вход третьего умножителя подключен к выходу первого сумматора, выход третьего умножителя подключен к входу третьего интегратора, выход третьего интегратора соединен с первым входом четвертого умножителя, второй вход четвертого умножителя связан с выходом первого сумматора, выход четвертого умножителя связан со вторым входом четвертого сумматора, а первый вход четвертого, сумматора связан с выходом второго умножителя, выход четвертого сумматора подключен к входу блока задержки, входу объекта регулирования и к первому входу второго сумматора, выход блока задержки подключен к второму входу второго сумматора, второму входу второго умножителя и к первому входу первого умножителя.
Недостатком этой системы является невозможность ее работы с астатическими объектами, у которых измерению доступен только выходной сигнал объекта, но не его производные.
Задачей изобретения является расширение функциональных возможностей системы, т.е. обеспечение возможности управления астатическими объектами, у которых измерению доступен только выходной сигнал, но не его производные.
Сущность изобретения состоит в том, что в систему, содержащую объект регулирования, первый блок задания коэффициентов, первый сумматор, первый умножитель, первый интегратор, второй умножитель, второй сумматор, второй интегратор, второй блок задания коэффициентов, третий сумматор, третий умножитель, третий интегратор, четвертый умножитель, четвертый сумматор, блок задержки на величину τ, входы первого сумматора подключены к соответствующим выходам первого блока задания коэффициентов, второй вход второго сумматора подключен к выходу блока задержки, третий вход второго сумматора связан с выходом второго блока задания коэффициентов, выход второго сумматора подключен к входу второго интегратора, выход которого подключен к первому входу третьего сумматора и к входу второго блока задания коэффициентов, второй вход третьего сумматора связан с выходом первого сумматора, выход третьего сумматора соединен со вторым входом первого умножителя и с первым входом третьего умножителя, второй вход третьего умножителя подключен к выходу первого сумматора, выход третьего умножителя подключен к входу третьего интегратора, выход третьего интегратора соединен с первым входом четвертого умножителя, второй вход четвертого умножителя связан с выходом первого сумматора, выход четвертого умножителя связан со вторым входом четвертого сумматора, а первый вход четвертого сумматора связан с выходом второго умножителя, выход четвертого сумматора подключен к входу блока задержки, и к первому входу второго сумматора, выход блока задержки подключен ко второму входу второго сумматора, второму входу второго умножителя и к первому входу первого умножителя, дополнительно введены блок линейной части адаптивного регулятора и фильтр переменных состояния, при этом на вход блока линейной части адаптивного регулятора поступает сигнал с выхода четвертого сумматора, выход блока линейной части адаптивного регулятора соединен с входом объекта управления, выход объекта управления подается на фильтр переменных состояния, выходы фильтра переменных состояния подаются на соответствующие входы первого блока задания коэффициентов.
Вводя в систему блок линейной части адаптивного регулятора и фильтр переменных состояния, получают в системе новую функцию, которая заключается в том, что теперь система может работать с астатическими объектами, у которых измерению доступен только выходной сигнал, но не его производные.
На фиг.1 представлена блок-схема предлагаемой системы; на фиг.2 - схема блока фильтра переменных состояния; на фиг.3 - схема звена WФ i(р) фильтра переменных состояния.
Система содержит объект регулирования 1, первый блок задания коэффициентов 2, первый сумматор 3, первый умножитель 4, первый интегратор 5, второй умножитель 6, второй сумматор 7, второй интегратор 8, второй блок задания коэффициентов 9, третий сумматор 10, третий умножитель 11, третий интегратор 12, четвертый умножитель 13, четвертый сумматор 14, блок задержки 15, фильтр переменных состояния 16, блок линейной части адаптивного регулятора 17.
Объект регулирования описывается уравнением

где ρ=d/t, - оператор дифференцирования, ф(t)∈R - скалярный выход объекта, τ=const>0 - известное постоянное запаздывание, α(р), ω(р) - соответственно числитель и знаменатель передаточной функции объекта управления, degω(р)=n - порядок полинома знаменателя передаточной функции объекта управления, degα(p)=m - порядок полинома числителя передаточной функции объекта управления, ϕ(t)∈R - скалярное управляющее воздействие.
Управляющее воздействие формируется с помощью адаптивного регулятора, состоящего из линейной и нелинейной части

где u(t) выход нелинейной части, WL(р) - передаточная функция линейной части адаптивного регулятора, которая в нашем случае имеет вид реального дифференцирующего звена
где К>0, Т>0 - соответственно коэффициент усиления и постоянная времени реального дифференцирующего звена.
Выход нелинейной части u(t) формируется следующим образом

где y(t) - m-мереный вектор отфильтрованных значений выхода φ(t) объекта регулирования, α0 - m-мерный вектор коэффициентов, выбираемый из условия
α0 *α(λ) - гурвицевый квазиполином степени n-1 с положительным старшим коэффициентом (α(λ) - числитель переда точной функции объекта регулирования).
Отфильтрованные выходные координаты объекта получаются с помощью фильтра переменных состояния, который состоит из одинаковых, последовательно соединенных звеньев, имеющих следующее описание
где i=2...m - число используемых звеньев, уi-1(t) - выход предыдущего звена, y1 (t)=φ(t) - первое значение вектора отфильтрованных выходных координат объекта.
В качестве звена 5 используется динамические звенья, имеющие передаточную функцию вида
где Т1>0, T2>0 - постоянные времени, Т1≫T2
С помощью критерия гиперустойчивости Попова можно показать, что асимптотическую устойчивость системе будут обеспечивать следующие алгоритмы настройки
где β>0 - число, γ>0 - число, z(t) - выход дополнительного контура, динамика которого описывается уравнением

где a0>0 - число.
Система функционирует следующим образом.
Сигнал U1=φ с выхода объекта регулирования 1 поступает на фильтр переменных состояния 16, сигнал U16=у с выходов фильтра переменных состояния 16 поступают на соответствующие входы блока задания коэффициентов 2. В блоке задания коэффициентов 2 происходит умножение отфильтрованного сигнала выхода объекта регулирования 1 уi на постоянный коэффициент вектора а0. Сигналы с выходов блока задания коэффициентов 2 поступают на соответствующие входы блока суммирования 3. Сигнал U3=а0 *·у с выхода блока суммирования 3 приходит на второй вход третьего сумматора 10, на второй вход третьего умножителя 11 и на второй вход четвертого умножителя 13, сигнал U10=ν с выхода третьего сумматора 10 подается на второй вход первого умножителя 4 и на первый вход третьего умножителя 11, сигнал U4=γ·u(t-τ)·ν с выхода первого умножителя 4 поступает на вход первого интегратора 5, сигнал U5=k с выхода первого интегратора 5 поступает на первый вход второго умножителя 6, сигнал U6=k·u(t-τ) с выхода второго умножителя 6 подается на первый вход четвертого сумматора 14, сигнал U11=β·α* 0·y·ν с выхода третьего умножителя 11 поступает на вход третьего интегратора 12, сигнал U12=χ с выхода третьего интегратора 12 поступает на первый вход четвертого умножителя 13, сигнал U13=χ·(a* 0·y) с выхода четвертого умножителя 13 подается на второй вход четвертого сумматора 14, сигнал U14=u с выхода четвертого сумматора 14 идет на вход блока линейной части адаптивного регулятора 17, на первый вход второго сумматора 7 и на вход блоха задержки 15, сигнал U15=u(t-τ) с выхода блока задержки 15 идет на второй вход второго сумматора 7, на первый вход первого умножителя 4 и на второй вход второго умножителя 6, сигнал U7=z с выхода второго сумматора 7 подается на вход второго интегратора 8, сигнал U8=2 с выхода второго интегратора 8 подается на первый вход третьего сумматора 10 и на вход второго блока задания коэффициентов 9, сигнал U9=а0·z с выхода второго блока задания коэффициентов 9 поступает на третий вход второго сумматора 7, на вход объекта регулирования 1 поступает сигнал с выхода блока линейной части адаптивногорегулятора 17.
Функциональная схема фильтра переменных состояния представлена на фиг.2; функциональная схема звена Wi Ф (р), из которых состоит фильтр переменных состояний представлена на фиг.3.
Первый суммирующий вход пятого сумматора 18 (для i-го звена) связан с выходом предыдущего звена уi-1 (или в случае первого звена y1=φ), выход  пятого сумматора 18 связан с входом четвертого интегратора 19, первый вход пятого сумматора 20 связан с выходом четвертого интегратора 13, второй вход шестого сумматора 20 связан с выходом предыдущего звена уi-1 (или в случае первогозвена y1=φ), на выходе шестого сумматора 20 формируется сигнал yi, который является одновременно выходом фильтра переменных состояния и входом следующего звена Wi Ф.
пятого сумматора 18 связан с входом четвертого интегратора 19, первый вход пятого сумматора 20 связан с выходом четвертого интегратора 13, второй вход шестого сумматора 20 связан с выходом предыдущего звена уi-1 (или в случае первогозвена y1=φ), на выходе шестого сумматора 20 формируется сигнал yi, который является одновременно выходом фильтра переменных состояния и входом следующего звена Wi Ф.
Функциональная схема линейной части адаптивного регулятора представлена на фиг.4.
Сигнал с выхода четвертого сумматора 14 поступает на суммирующий вход седьмого сумматора 21, на второй вычитающий вход седьмого сумматора 21 с соответствующим коэффициентом  поступает сигнал с выхода пятого блока интегрирования 22, на вход пятого блока интегрирования 22 поступает сигнал U23=U16=ϕ с выхода второго блока задания коэффициентов 23, во втором блоке задания коэффициентов 23 происходит умножение сигнала, поступающего с выхода седьмого блока суммирования 21 на коэффициент
поступает сигнал с выхода пятого блока интегрирования 22, на вход пятого блока интегрирования 22 поступает сигнал U23=U16=ϕ с выхода второго блока задания коэффициентов 23, во втором блоке задания коэффициентов 23 происходит умножение сигнала, поступающего с выхода седьмого блока суммирования 21 на коэффициент 
Данное устройство может быть реализовано промышленным способом, на основе стандартной элементарной базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437137C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2468406C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2459226C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2013 |
|
RU2513847C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2281541C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2005 |
|
RU2288496C1 |
| Адаптивная система управления с фильтр-корректором для априорно неопределенных динамических объектов с периодическими коэффициентами | 2015 |
|
RU2620726C1 |
| Адаптивная система управления с фильтр-корректором для динамических объектов с периодическими коэффициентами | 2015 |
|
RU2624489C2 |
| Комбинированная адаптивная система управления с фильтр-корректором для априорно неопределенных динамических объектов с периодическими коэффициентами | 2015 |
|
RU2622674C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
Изобретение относится к автоматике и может быть использовано в системах управления астатическими объектами с известным запаздыванием, параметрами которых являются неизвестные постоянные или медленно меняющиеся во времени величины, а измерению доступен только выходной сигнал объекта. Технический результат включается в обеспечении возможности управления астатическими объектами, у которых измерению доступен только выходной сигнал объекта. Самонастраивающаяся система управления для астатических объектов с запаздыванием по управлению содержит объект регулирования, два блок задания коэффициентов, четыре сумматора, четыре умножителя, три интегратора, блок задержки, блок линейной части адаптивного регулятора, фильтр переменных состояния. 4 ил.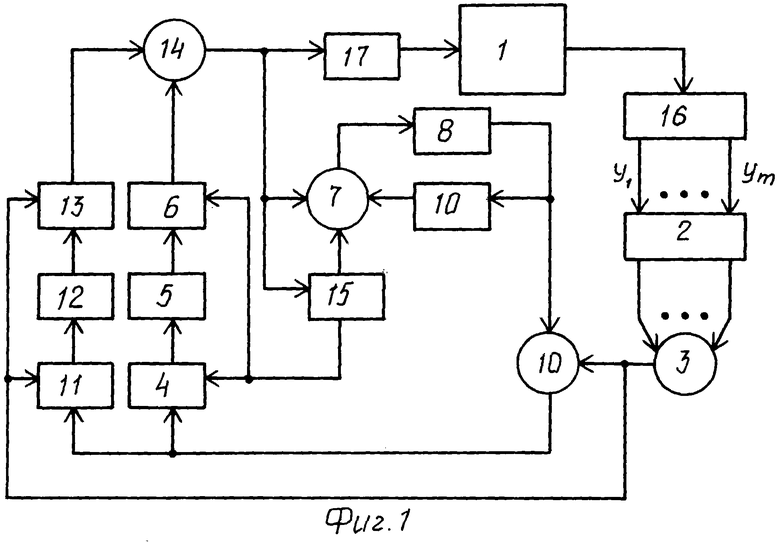
Самонастраивающаяся система управления для астатических объектов с запаздыванием по управлению, содержащая объект регулирования, первый блок задания коэффициентов, первый сумматор, первый умножитель, первый интегратор, второй умножитель, второй сумматор, второй интегратор, второй блок задания коэффициентов, третий сумматор, третий умножитель, третий интегратор, четвертый умножитель, четвертый сумматор, блок задержки, входы первого сумматора подключены к соответствующим выходам первого блока задания коэффициентов, второй вход второго сумматора подключен к выходу блока задержки, третий вход второго сумматора связан с выходом второго блока задания коэффициентов, выход второго сумматора подключен к входу второго интегратора, выход которого подключен к первому входу третьего сумматора и к входу второго блока задания коэффициентов, второй вход третьего сумматора связан с выходом первого сумматора, выход третьего сумматора соединен с вторым входом первого умножителя и с первым входом третьего умножителя, второй вход третьего умножителя подключен к выходу первого сумматора, выход третьего умножителя подключен к входу третьего интегратора, выход третьего интегратора соединен с первым входом четвертого умножителя, второй вход четвертого умножителя связан с выходом первого сумматора, выход четвертого умножителя связан с вторым входом четвертого сумматора, а первый вход четвертого сумматора связан с выходом второго умножителя, выход четвертого сумматора подключен к входу блока задержки и к первому входу второго сумматора, выход блока задержки подключен к второму входу второго сумматора, второму входу второго умножителя и к первому входу первого умножителя, отличающаяся тем, что в систему дополнительно введены блок линейной части адаптивного регулятора и фильтр переменных состояния, при этом на вход блока линейной части адаптивного регулятора поступает сигнал с выхода четвертого сумматора, выход блока линейной части адаптивного регулятора соединен с входом объекта управления, выход объекта управления поступает на фильтр переменных состояния, выходы фильтра переменных состояния подаются на соответствующие входы первого блока задания коэффициентов.
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2001 |
|
RU2210800C2 |
| RU 2058577 C1, 20.04.1996 | |||
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2222040C1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1105860A1 |
| Адаптивная система управления | 1988 |
|
SU1578696A2 |
| Способ подготовки к работе прокатных валков | 1983 |
|
SU1135508A1 |
| US 5301101 A, 04.05.1994 | |||
| СПОСОБ КРЕПЛЕНИЯ ВУЛКАНИЗОВАННЫХ РЕЗИН К МЕТАЛЛУ | 2006 |
|
RU2307857C1 |
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЭЛЕКТРИЧЕСКОГО ТОКА В ЭЛЕКТРОЛИТИЧЕСКОЙ ЯЧЕЙКЕ | 0 |
|
SU180669A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

