Изобретение относится к системам управления вентильными электродвигателями вращения антенны радиолокационной станции (РЛС) и может быть использовано в антенно-мачтовых устройствах (АМУ) радиолокационных комплексов.
В настоящее время, в связи с появлением новых средств воздушного нападения, возросли требования к системам воздушно-космической обороны по обнаружению низколетящих высокоскоростных объектов. Поэтому современные РЛС, все чаще и чаще, проектируются с активными фазированными антенными решетками (АФАР), дающими возможность, несмотря на большие размеры полотен антенн, новому поколению РЛС быть мобильными, малогабаритными, иметь высокие энергетические и технические показатели, работать при больших динамических перегрузках и т.д.
Особенностью современных РЛС является то, что в ее автономной системе электроснабжения есть две, соизмеримые по мощности и переменные по величине, нагрузки - передающее устройство (ПУ) и электродвигатель АМУ. Каждая из них может составлять до 30…35% мощности дизель-генератора (РЛС является автономным объектом с первичным источником питания (генератором) ограниченной мощности). В связи с чем, очень важно найти оптимальный вариант управления их режимами. Таким образом, одной из основных систем современных РЛС является электропривод вращения АМУ, от качественной работы которой зависит эффективность работы всей РЛС.
Известна система управления вентильным электродвигателем вращения антенны РЛС [1, рис.7], содержащая трехфазный выпрямитель, фильтр (дроссель, конденсатор), четыре датчика тока, датчик напряжения, устройство торможения, инвертор, блок драйверов, устройство управления, датчик угла поворота антенны, вентильный электродвигатель и антенну.
Недостатками системы управления аналога являются:
- недостаточная надежность;
- низкие тактико-технические характеристики РЛС.
Обычно РЛС подобного типа имеют три угловые скорости вращения антенны, например 12, 6, 3 об/мин. Это связано с режимами работы РЛС и ветровыми нагрузками на полотно антенны. Дело в том, что при больших ветровых нагрузках возрастает ток в цепях статора вентильного электродвигателя. Оба датчика тока передают соответствующий сигнал в блок управления, и происходит переход на более низкую угловую скорость вращения антенны.
В то же время, возможно, такого большого снижения угловой скорости вращения (далее по тексту - скорость вращения антенны) и не требуется. Однако датчики тока не позволяют точно определить допустимую скорость вращения антенны, а система управления обеспечить вращение вентильного электродвигателя с этой скоростью.
Следует отметить, что переход со скорости вращения, например с 12 об/мин на 6 об/мин, снижает вдвое такие тактические характеристики РЛС, как скорость обзора и точность сопровождения наблюдаемых объектов.
Кроме того, при пуске антенны и переходе с одной скорости вращения на другую могут возникнуть ускорения, которые также могут повредить или разрушить полотно антенны.
Известна также система управления вентильным электродвигателем вращения антенны РЛС [2], которая является наиболее близкой по технической сущности и принятая за прототип, включающая в себя первую, вторую и третью клеммы, подключенные к входу трехфазного выпрямителя. Положительный выход выпрямителя подключен к первому выводу дросселя, второй вывод которого подключен к первому выводу конденсатора, к первому входу датчика напряжения и через первый датчик тока - к первому выводу устройства торможения, а также к первому входу инвертора. Отрицательный вывод трехфазного выпрямителя подключен ко второму выводу конденсатора, второму выводу датчика напряжения, через второй датчик тока - ко второму выводу устройства торможения и ко второму входу инвертора. Первый выход инвертора через третий датчик тока подключен к первому входу вентильного электродвигателя, а второй его выход - ко второму входу вентильного электродвигателя. Третий выход инвертора через четвертый датчик тока подключен к третьему входу вентильного электродвигателя. Выходы датчика напряжения, первого, второго, третьего, четвертого датчиков тока соединены с первым, вторым, третьим, четвертым, пятым входами блока управления инвертором. Датчик угла поворота, установленный на валу ротора вентильного электродвигателя, соединенного с антенной (АФАР), подключен к шестому входу блока управления инвертором. Первый выход блока управления соединен с входом блока драйверов. Первый выход блока драйверов соединен с третьим входом инвертора. Второй выход блока драйверов соединен с входом устройства торможения. Вход редуктора соединен с валом ротора вентильного электродвигателя, а его выход - с антенной. Первый выход устройства управления комплексом соединен с седьмым входом блока управления инвертором. Датчик изгиба соединен с входом устройства коррекции скорости и ускорения, выход которого подключен к восьмому входу блока управления инвертором.
В рассматриваемой системе управления вентильным электродвигателем обратная связь датчика изгиба обеспечивает скорость вращения антенны, примерно пропорциональную моменту на валу вентильного двигателя или его току питания.
При поперечном, относительно направления ветра, положении антенна испытывает максимальную нагрузку. Поскольку момент на валу электродвигателя не меняется, скорость вращения антенны уменьшается. Потребляемая электроприводом мощность постоянна.
При продольном, относительно направления ветра, положении антенна испытывает минимальную нагрузку. Поскольку момент на валу электродвигателя не меняется, скорость вращения антенны возрастает. Потребляемая электроприводом мощность постоянна.
Таким образом, антенна в течение одного оборота изменяет свою скорость вращения, а ПУ генерирует импульсы все время с постоянной частотой, т.е. ПУ потребляет мощность от источника питания и, следовательно, от генератора, величина которой не зависит от скорости вращения антенны.
Скорость обзора ограничена временем:
τDmax=2Dmax/c;
Dmах - максимальная дальность РЛС;
с - скорость света.
При выполнении условия однозначного измерения дальности:
τDmax ≤ТП;
TП - период повторения зондирующих импульсов.
Угловая скорость вращения антенны равна [3]:
αА - ширина диаграммы направленности антенны;
N - число импульсов.
Для надежного обнаружения, а также определения координат цели в процессе обзора необходимо принять не один, а 3-4 сигнальных импульса в пределах диаграммы направленности антенны.
Из выражения (1) видно, что при уменьшении скорости вращения антенны допустимо увеличить период повторения зондирующих импульсов, т.е. уменьшить частоту следования зондирующих импульсов. Потребляемая ПУ мощность будет минимальной.
При увеличении скорости вращения антенны необходимо уменьшить период повторения зондирующих импульсов, т.е. увеличить частоту следования зондирующих импульсов. Потребляемая ПУ мощность будет максимальной.
Если устанавливать частоту зондирующих импульсов в соответствии с максимальной скоростью вращения антенны, то при уменьшении скорости вращения антенны частота следования зондирующих импульсов оказывается завышенной, что приводит к излишнему потреблению ПУ мощности от источника питания и, следовательно, от генератора.
Ухудшается такая техническая характеристика РЛС, как потребление мощности от источников питания.
Если устанавливать частоту зондирующих импульсов в соответствии с минимальной скоростью вращения антенны, то при увеличении скорости вращения антенны частота следования зондирующих импульсов оказывается недостаточной для надежного обнаружения, а также определения координат цели в процессе обзора. Надежность является тактической характеристикой РЛС.
При некотором повороте антенны и снижении ветровой нагрузки скорость вращения антенны можно увеличить только на определенную величину. Это связано с номинальной скоростью вращения вентильного электродвигателя, скорость вращения которого ограничивается сигналом обратной связи с датчика скорости. Момент на валу антенны может оказаться меньше заданного. Потребляемая электроприводом мощность уменьшается.
Мощность, потребляемая электроприводом, в течение одного оборота оказывается величиной переменной. Если в качестве первичного источника питания используется генератор ограниченной мощности, то при переменной величине потребляемой мощности он может оказаться перегруженным. Включаются его элементы защиты, и РЛС отключается. Необходимо произвести ее повторное включение. Кроме того, наблюдается нежелательная модуляция напряжения сети. Ухудшается электромагнитная совместимость РЛС.
Снижается техническая характеристика РЛС - надежность (функциональная).
Отмеченные недостатки ухудшают тактико-технические характеристики РЛС и ограничивают область применения системы управления вентильным электродвигателем вращения антенны РЛС.
Техническим результатом изобретения является расширение функциональных возможностей системы управления вентильным электродвигателем вращения антенны РЛС за счет выравнивания потребляемой от генератора мощности, при улучшении тактико-технических характеристик РЛС.
Технический результат достигается тем, что в систему управления вентильным электродвигателем вращения антенны РЛС, включающую дизель, механически соединенный с генератором, первый выпрямитель, фильтр, два датчика тока, датчик напряжения, инвертор, блок управления инвертором, устройство торможения, блок драйверов, вентильный электродвигатель, редуктор, датчик угла поворота антенны, устройство коррекции скорости и антенну, содержащую датчик изгиба полотна антенны, второй выпрямитель, «N» полупроводниковых преобразователей, «N» передающих устройств, вводятся устройство коррекции мощности, третий датчик тока, второй датчик напряжения и датчик скорости. При этом выход генератора подключен к входам первого и второго выпрямителей. Выход первого выпрямителя через фильтр подключен к входу первого датчика напряжения и через первый датчик тока - к первым входам устройства торможения и инвертора. Выход инвертора через второй датчик тока подключен к вентильному электродвигателю. Вал вентильного электродвигателя механически соединен с редуктором, который, в свою очередь, механически соединен с антенной, содержащей второй выпрямитель, третий датчик тока, «N» полупроводниковых преобразователей, «N» передающих устройств и датчик изгиба полотна антенны. При этом выход второго выпрямителя через третий датчик тока соединен с входами «N» полупроводниковых преобразователей, выходы которых подключены к первым входам «N» передающих устройств. Кроме того, выход второго выпрямителя соединен с входом второго датчика напряжения, выход которого соединен с первым входом устройства коррекции мощности. Второй вход устройства коррекции мощности соединен с выходом третьего датчика тока. Третий вход устройства коррекции мощности соединен с выходом первого датчика напряжения, а четвертый его вход - с выходом первого датчика тока. Первый выход устройства коррекции мощности соединен со вторыми входами «N» передающих устройств, а второй его выход - с пятым входом блока управления инвертором. На валу ротора вентильного электродвигателя установлены датчик скорости и датчик угла поворота антенны. При этом выходы второго датчика тока, датчика скорости и датчика угла поворота антенны подсоединены, соответственно, к первому, второму и четвертому входам блока управления инвертором, третий вход которого через устройство коррекции скорости подключен к выходу датчика изгиба полотна антенны. Выход блока управления инвертором подключен к входу блока драйверов, первый выход которого подсоединен ко второму входу инвертора, а второй его выход - ко второму входу устройства торможения.
Для выравнивания мощности, потребляемой преобразователями от генератора, необходимо изменять мощность, потребляемую ПУ от источника питания, подключенного к тому же генератору. Предлагаемая система управления вентильным электродвигателем антенны РЛС позволяет выравнивать потребляемую мощность. Это достигается, например, изменением частоты следования генерируемых ПУ импульсов (зондирующих импульсов).
При изменении скорости вращения антенны и соответствующем изменении частоты зондирующих импульсов происходит выравнивание мощности, потребляемой ПУ и электроприводом от генератора.
Таким образом происходит, практически, полное выравнивание потребляемой полупроводниковыми преобразователями АФАР мощности, во время полного оборота антенны.
На фигуре представлена структурная схема системы управления вентильным электродвигателем вращения антенны РЛС и приняты следующие обозначения:
1 - дизель;
2 - генератор;
3 - второй выпрямитель;
4 - первый выпрямитель;
5 - второй датчик напряжения;
6 - фильтр (дроссель, конденсатор);
7 - третий датчик тока;
8 - устройство коррекции мощности;
9 - первый датчик напряжения;
10 - «N» полупроводниковых преобразователей;
11 - первый датчик тока;
12 - «N» передающих устройств;
13 - устройство торможения;
14 - инвертор;
15 - блок драйверов;
16 - блок управления инвертором;
17 - второй датчик тока;
18 - вентильный двигатель;
19 - датчик скорости;
20 - датчик угла поворота антенны;
21 - антенна;
22 - датчик изгиба полотна антенны;
23 - редуктор;
24 - устройства коррекции скорости.
Система управления вентильным электродвигателем вращения антенны РЛС содержит дизель 1, механически соединенный с генератором 2. Выход генератора 2 подключен к входам первого 4 и второго 3 выпрямителей. Выход первого выпрямителя 4 через фильтр 6 подключен к входу первого датчика напряжения 9 и через первый датчик тока 11 - к первому входу устройства торможения 13 и первому входу инвертора 14. Выход инвертора 14 через второй датчик тока 17 подключен к вентильному электродвигателю 18. Вал вентильного электродвигателя 18 механически соединен с редуктором 23, который, в свою очередь, механически соединен с антенной 21. Антенна 21 содержит второй выпрямитель 3, третий датчик тока 7, «N» полупроводниковых преобразователей 10, «N» передающих устройств 12 и датчик изгиба полотна антенны 22. При этом выход второго выпрямителя 3 через третий датчик тока 7 соединен с входами «N» полупроводниковых преобразователей 10, выходы которых подключены к первым входам «N» передающих устройств 12. Кроме того, выход второго выпрямителя 3 соединен с входом второго датчика напряжения 5, выход которого соединен с первым входом устройства коррекции мощности 8, второй вход которого соединен с выходом третьего датчика тока 7. Третий вход устройства коррекции мощности 8 соединен с выходом первого датчика напряжения 9, а четвертый его вход - с выходом первого датчика тока 11. Первый выход устройства коррекции мощности 8 соединен со вторыми входами «N» передающих устройств 12, а второй его выход - с пятым входом блока управления инвертором 16. На валу ротора вентильного электродвигателя 18 установлены датчик скорости 19 и датчик угла поворота антенны 20. При этом выходы второго датчика тока 17, датчика скорости 19 и датчика угла поворота антенны 20 подсоединены, соответственно, к первому, второму и четвертому входам блока управления инвертором 16, а третий его вход через устройство коррекции скорости 24 подключен к выходу датчика изгиба полотна антенны 22. Выход блока управления инвертором 16 подключен к входу блока драйверов 15, первый выход которого подсоединен ко второму входу инвертора 14, а второй его выход - ко второму входу устройства торможения 13.
Система управления вентильным электродвигателем антенны РЛС работает следующим образом.
Включается дизель 1, начинается вращение ротора генератора 2, на выходе которого появляется трехфазное напряжение 380 В, 50 Гц, которое подается на входы первого 4 и второго 3 выпрямителей. Одновременно требуемые напряжения питания подаются на другие блоки и устройства системы управления (на фигуре не обозначены).
С выхода второго выпрямителя 4 постоянное напряжение подается на вход полупроводниковых преобразователей 10, с выхода которых постоянное напряжение поступает на вход передающих устройств 12. С выхода передающих устройств 12 сформированные импульсы подаются на диполи антенны 21. Формируется диаграмма направленности антенны 21.
Блок управления инвертором 16 обеспечивает следующие режимы работы:
- круговой обзор по требуемому закону управления;
- секторный режим вращения антенны;
- установка антенны на азимут.
Блок управления 16 подает на вход блока драйверов 15 импульсы и блок драйверов 15 формирует импульсы для управления транзисторами инвертора 14. Трехфазное напряжение подается на входы вентильного электродвигателя 18. Начинается плавный разгон вентильного электродвигателя 18 и через редуктор 23 - антенны 21.
При превышении ветровой нагрузки происходит изгиб полотна антенны 21 больше допустимой величины. Поскольку полотно антенны 21 имеет ограниченную жесткость конструкции, то с выхода датчика изгиба полотна антенны 22, представляющего собой совокупность тензорезисторов, прикрепленных к несущей конструкции антенны (действие тензорезисторов основано на принципе изменения сопротивления металлов и полупроводников под действием деформации), соответствующий сигнал передается на вход устройства коррекции скорости 24. С выхода устройства коррекции скорости 24 сигнал передается на третий вход блока управления инвертором 16.
Здесь сигнал проходит обработку и передается на блок драйверов 15, на инвертор 14, затем и на вентильный электродвигатель 18. Скорость (ускорение) вращения антенны уменьшается и, следовательно, величина изгиба полотна антенны 21 возвращается в исходное состояние. Дальнейшее вращение полотна антенны 21 происходит при допустимой величине изгиба. Тем самым, скорость вращения ограничивается величиной изгиба полотна антенны.
Таким образом, ограничением для скорости антенны 21 является не перегрузка вентильного электродвигателя 18, а прочностные характеристики антенны (допустимая величина изгиба).
При снижении скорости вращения антенны 21 происходит возрастание напряжения на конденсаторе индуктивно-емкостного фильтра 6. Первый датчик напряжения 9 передает соответствующий сигнал через устройство коррекции мощности 8 на блок управления инвертором 16, который через блок драйверов 15 включает устройство торможения 13. Происходит разряд конденсатора фильтра 6.
Первый датчик тока 11 осуществляет защитную функцию. При неисправности инвертора 14 он передает соответствующий сигнал на устройство коррекции мощности 8 и далее в блок управления инвертором 16, который останавливает работу инвертора 14 и отключает с входа выпрямителя 4 трехфазное напряжение 380 В, 50 Гц (исполнительный орган, отключающий трехфазное напряжение, на фигуре не показан).
Второй датчик тока 17 также осуществляет защитную функцию. При неисправности вентильного электродвигателя 18 он передает на блок управления инвертором 16 соответствующий сигнал, который останавливает работу инвертора 14 и отключает с входа выпрямителя 4 трехфазное напряжение 380 В, 50 Гц (исполнительный орган, отключающий трехфазное напряжение, на фигуре не показан).
Обратная связь датчика изгиба 22 обеспечивает скорость вращения антенны, примерно пропорциональную моменту на валу вентильного двигателя или его току питания.
Первый 9 и второй 5 датчики напряжения, первый 11 и третий 7 датчики тока передают информацию о величинах напряжения и токов на выходе первого 4 и второго 3 выпрямителей в устройство коррекции мощности 8, где проводится расчет потребляемых от выпрямителей 4, 3 мощностей. Полученные данные из устройства коррекции мощности 8 поступают в блок управления инвертором 16 и передающие устройства 12. Выбираются рациональные режимы работы электропривода и ПУ (устанавливается требуемая частота зондирующих импульсов, допустимая скорость вращения антенны).
В зависимости от положения антенны относительно направления ветра, из-за изменения ветровой нагрузки на антенну в течение одного оборота, происходит изменение угловой скорости вращения.
При поперечном положении антенны относительно направления ветра происходит увеличение ветровой нагрузки и уменьшение угловой скорости вращения антенны, которая фиксируется датчиком скорости 19. Мощность, потребляемая электроприводом, максимальна.
Из выражения (1) видно, что допустимо увеличить период повторения зондирующих импульсов, т.е. уменьшить частоту следования зондирующих импульсов. Мощность, потребляемая ПУ, уменьшается.
Потребление мощности от генератора 2 электроприводом антенны и ПУ практически остается постоянным.
Улучшается такая техническая характеристика РЛС, как потребление мощности от источников питания.
При продольном положении антенны относительно направления ветра происходит уменьшение ветровой нагрузки и увеличение скорости вращения антенны, которая фиксируется датчиком 19. Здесь должен уменьшаться период повторения зондирующих импульсов, т.е. увеличиваться их частота следования.
Это приводит к улучшению тактической характеристики - увеличению скорости обзора РЛС. Также обеспечивается надежное обнаружение и определение координат цели в процессе обзора. Происходит улучшение тактических характеристик РЛС - точности сопровождения наблюдаемых объектов и надежности (функциональной).
Увеличение скорости вращения антенны ограничивается номинальной скоростью вращения вентильного электродвигателя. Таким образом, величина момента на валу вентильного электродвигателя и, следовательно, потребление мощности электроприводом может не достигнуть требуемой величины.
Однако уменьшение периода повторения зондирующих импульсов приводит к увеличению мощности, потребляемой ПУ. Частота зондирующих импульсов ограничивается заданной тактической характеристикой - зоной действия РЛС (дальностью).
Потребление мощности от генератора 2 электроприводом антенны и ПУ практически остается постоянным.
Постоянство мощности, потребляемой электроприводом антенны и ПУ, устраняет возможность перегрузки генератора ограниченной мощности и обеспечивает его устойчивую работу. Улучшается тактическая характеристика РЛС - надежность (функциональная).
Установка антенны на азимут производится в соответствии с сигналом датчика угла поворота антенны 20.
Секторный режим работы реализуется следующим образом. Антенна устанавливается в соответствии с требуемым азимутом. Смещение диаграммы направленности антенны обеспечивается электронным сканированием.
Таким образом, введение новых элементов с соответствующим их соединением в структурную схему системы управления вентильным электродвигателем антенны позволяет улучшить тактические и технические характеристики РЛС:
- увеличить скорость обзора;
- увеличить точность сопровождения наблюдаемых объектов;
- повысить надежность (функциональную);
- уменьшить потребление мощности от источников питания и генератора.
Из вышесказанного следует, что предлагаемая система управления вентильным электроприводом антенны РЛС имеет более широкие функциональные возможности и оптимальна с точки зрения электромагнитной совместимости, а именно при возрастании момента на валу электродвигателя АМУ потребляемая мощность ПУ снижается и наоборот. В результате потребляемая от генератора мощность выравнивается, электромагнитная совместимость возрастает, что положительно влияет на эффективность работы РЛС в целом.
Источники информации
1. Кириенко В.П., Стрелков В.Ф., Тетенькин Л.В. Система электропитания радиолокационного комплекса / Сборник докладов 1-ой Всероссийской конференции по средствам электропитания, Санкт-Петербург, 2007, с.21-27.
2. Патент на полезную модель №94087, РФ, МПК Н02Р 7/00, Система управления вентильным электродвигателем вращения антенны РЛС / В.П.Кириенко, С.Ф.Хватов, В.Ф.Стрелков, Л.В.Тетенькин, БИ - 2010, №13.
3. Радиотехнические системы / под ред. профессора Ю.М.Казаринова, М.: «Высшая школа», 1990, 496 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2013 |
|
RU2541151C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2014 |
|
RU2554107C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2018 |
|
RU2677690C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2007 |
|
RU2329581C1 |
| Система управления приводами антенны станции наведения | 2022 |
|
RU2794200C1 |
| ИСТОЧНИК ЭЛЕКТРОПИТАНИЯ АППАРАТУРЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2013 |
|
RU2534028C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2007 |
|
RU2343613C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2008 |
|
RU2399138C1 |
| Вентильный электропривод | 1985 |
|
SU1300619A1 |
| Двухзонный вентильный электродвигатель | 1982 |
|
SU1073851A1 |
Изобретение относится к системам управления вентильными электродвигателями вращения антенны РЛС и может быть использовано в антенно-мачтовых устройствах (АМУ) радиолокационных комплексов. Техническим результатом изобретения является расширение функциональных возможностей системы управления вентильным электродвигателем вращения антенны за счет выравнивания потребляемой от генератора мощности, при улучшении тактико-технических характеристик РЛС. Технический результат достигается тем, что в схему управления вентильным электродвигателем вращения антенны вводятся устройство коррекции мощности, третий датчик тока, второй датчик напряжения, датчик скорости и, соответственно, новые связи между элементами, которые позволяют выравнивать потребляемую электроприводом антенны и передающим устройством (ПУ) мощность. Постоянство мощности, достигаемое, например, за счет изменения частоты следования генерируемых ПУ импульсов (зондирующих импульсов), устраняет возможность перегрузки генератора ограниченной мощности и обеспечивает его устойчивую работу (оптимальным, с точки зрения электромагнитной совместимости, является вариант, когда при возрастании момента на валу электродвигателя АМУ мощность ПУ должна снижаться и наоборот), что положительно влияет на эффективность работы РЛС в целом. 1 ил.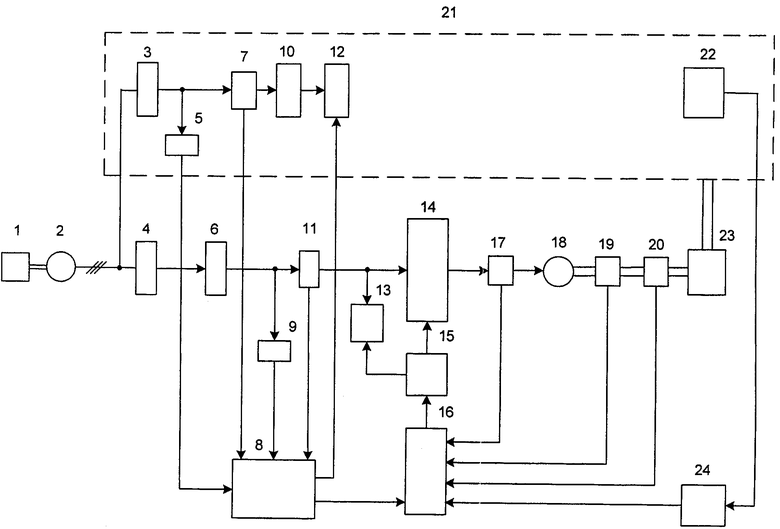
Система управления вентильным электродвигателем вращения антенны РЛС, включающая дизель, механически соединенный с генератором, выход которого подключен к входу первого выпрямителя, выход которого через фильтр подключен к входу первого датчика напряжения и через первый датчик тока - к первым входам устройства торможения и инвертора, при этом выход инвертора, через второй датчик тока, подключен к вентильному электродвигателю, вал которого механически соединен с редуктором, который, в свою очередь, механически соединен с антенной, содержащей датчик изгиба полотна антенны, второй выпрямитель, «N» полупроводниковых преобразователей, «N» передающих устройств, кроме того, на валу ротора вентильного электродвигателя установлен датчик угла поворота антенны, при этом выходы второго датчика тока и датчика угла поворота антенны подсоединены, соответственно, к первому и четвертому входам блока управления инвертором, а выход датчика изгиба полотна антенны, через устройство коррекции скорости подключен к третьему входу блока управления инвертором, выход блока управления инвертором подключен к входу блока драйверов, первый выход которого подсоединен ко второму входу инвертора, а второй его выход - ко второму входу устройства торможения, отличающаяся тем, что введены устройство коррекции мощности, второй датчик напряжения, третий датчик тока и датчик скорости, при этом вход второго выпрямителя подключен к выходу генератора, а его выход через третий датчик тока соединен с входами «N» полупроводниковых преобразователей, выходы которых подключены к первым входам «N» передающих устройств, кроме того, с выходом второго выпрямителя соединен вход второго датчика напряжения, выход которого подключен к первому входу устройства коррекции мощности, второй вход которого подключен к выходу третьего датчика тока, третий его вход подсоединен к выходу первого датчика напряжения, а четвертый его вход - с выходом первого датчика тока, кроме того, первый выход устройства коррекции мощности соединен со вторыми входами «N» передающих устройств, а второй его выход - с пятым входом блока управления инвертором.
| RU 2009145394 A, 01.01.2009 | |||
| Приспособление к металлорежущим станкам для центрирования крупногабаритных деталей | 1951 |
|
SU94087A1 |
| RU 2008149994 A, 17.12.2008 | |||
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2008 |
|
RU2399138C1 |
| IT VA20080070 A1, 30.06.2010 | |||
| US 2010244764 A1, 30.09.2010. | |||

