Изобретение относится к электротехнике и может быть использовано в системах управления промьшленными электроприводами с вентильным электродвигателем для разнообразных технологических механизмов, компрессоров, вентиляторов, насосов, горной и металлургической промьшленности.
Цель изобретения - повьшение динамических и экономических показателей системы привода при регулировании реактивной мощности.
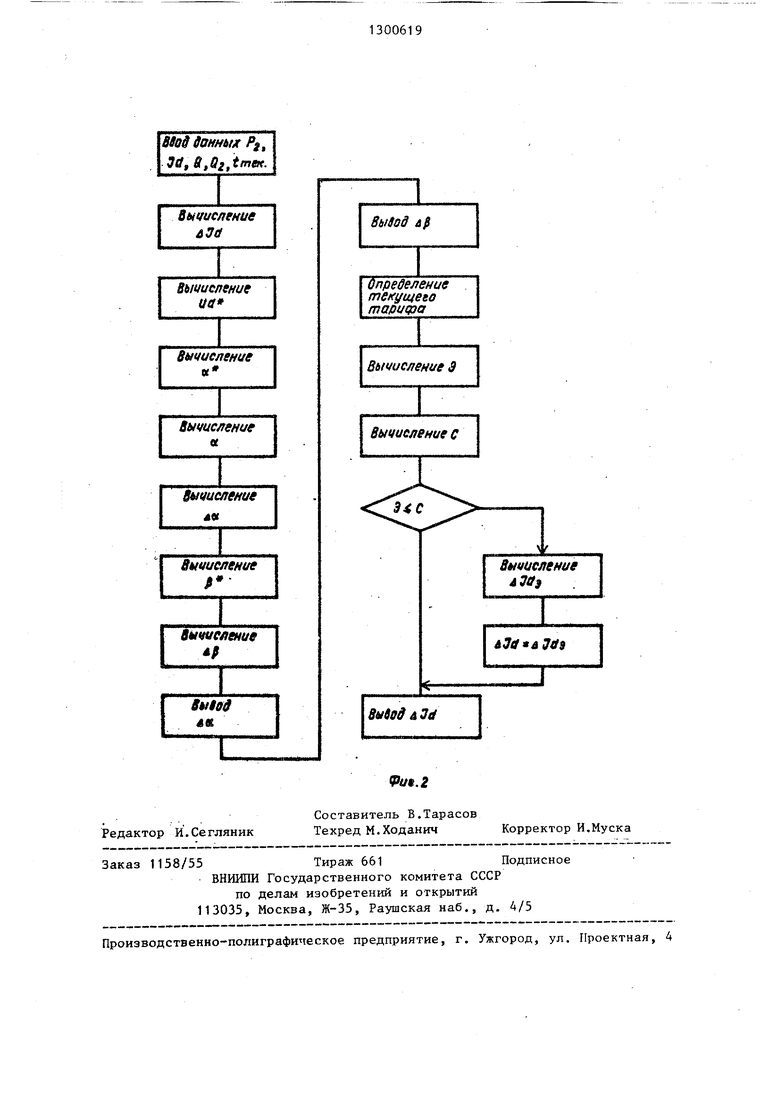
На фиг.1 приведена блок-схема вентильного электропривода} на фиг.2 - алгоритм работы вычислительного блока
Вентильный электропривод содержит синхронный двигатель 1, преобразователь частоты, выполненный в виде связанных между собой управляемого выпрямителя 2 и инвертора 3, выход которого подключен к синхронному двигателю 1. В цепь питания преобразователя частоты включены датчик 4 активной мощности и датчик 5 реактивной мощности. Во входную цепь инвертора 3 включен датчик 6 тока. Управляющий вход выпрямителя 2 подключен к выходу системы 7 импульсно-фазового управления. Один вход системы 7 импульсно- фазового управления подключен к выходу регулятора тока 8 с тремя входами, к одному из которых подключен выход регулятора скорости 9. Один вход регулятора скорости 9 соединен с выходом задатчика частоты вращения 10, а другой вход регулятора скорости 9 - с выходом датчика частоты вращения 11, установленном на валу синхронного двигателя 1.
Управляющий вход инвертора 3 подключен к выходу системы 12 импульсно- фазового управления, один вход которой соединен с выходом задатчика 13 угла опережения инвертора. Электропривод содержит также датчик 14 реактивной мощности, установленный в цепи питания преобразователя частоты, за- датчик 15 реактивной мощности, сумматор 16, блок 17 регулирования реактивной мощности и таймер 18. Выход датчика 14 подключен к одному входу сумматора 16, второй вход которого соединен с выходом задатчика 15. Блок 17 выполнен в виде вычислительного блока, реализующего алгоритм, указанный на фиг.2, и снабжен дополнительными входами. Входы блока 17 соединены соответственно с выходом суммато
5
0
5
0
5
0
ра 1&, датчиками 5 и 6, а дополни- т ельные входы - с датчиком 4 и выходом таймера 18 соответственно. Выходы блока 17 подключены соответственно ко вторым входам системы 7 и 12 и вторым входом регулятора 8 тока. Третий вход регулятора тока 8 соединен с выходом датчика тока 6.
Вычислительный блок 17 обеспечивает коррекцию углов управления выпрямителем и инвертором, а также тока в силовой цепи, изменением которых обеспечивается инвариантность момента и скорости двигателя. В качестве вы«
числительного блока может быть использован микропроцессор или микро- ЭВМ, например Электроника ДЗ-28, Электроника С-5 и другие, обеспечивающие отработку алгоритма при заданном быстродействии.
Устройство работает следующим образом.
Синхронный двигатель 1 через выпрямитель 2 и инвертор 3 питается от промьшленной сети с потребителями электроэнергии 19. Управление выпрямителем 2 вентильного двигателя осу- ществляется с помощью системы подчиненного регулирования, включающей последовательно соединенные систему 7 импульсно-фазового управления, регулятор 8 тока, регулятор 9 скорости, на первый вход которого поступает сигнал от задатчика частоты вращения 10, а второй вход соединен с датчиком 11 частоты вращения синхронного двигателя 1. С выхода регулятора 9 скорости сигнала поступает на первый вход регулятора 8 тока. При изменении реактивной мощности потребителей необходиь1о изменение выпрямленного тока цепи выпрямитель-инвертор на величину ilj
45
cj -M- (1)
где л5 - приращение полной мощности; Uc - напряжение сети;
Q, Qc - Qjcxs;
Qc -реактивная мощности сети,
О а заданная реактивная мощ- З
ность
Q -потребляемая реактивная мощность.
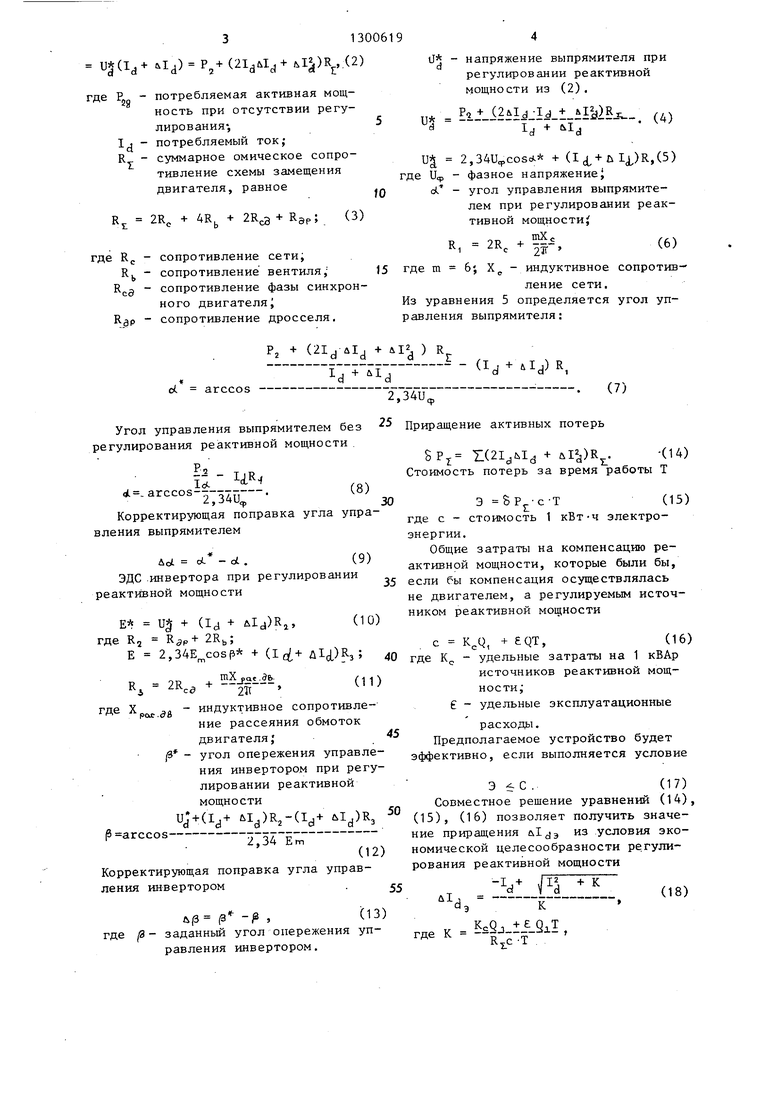
При регулировании реактивной мощности потребляемая активная мощность
Р. Ра9- ) RI- d T313006194
a 2 ..(2) - напряжение выпрямителя при
регулировании реактивной
где Р„ - потребляемая активная мощ-мощности из (2).
ность при отсутствии регу-р го.т..т, + тг,
лирования-,5 U - -i ii -I-d-t- I lR- -. (4)
Ij - потребляемый ток;
R - суммарное омическое сопро- у. 2,. + (I cL+ Ij )R,(5) тивление схемы замещения g напряжениеJ
двигателя, равное , управления выпрямите,„,лем при регулировании реакН 2R, + 4R -н 2R Rap; , О) мощности.
где RJ. - сопротивление сети; с 2ЭГ
R - сопротивление вентиля, 15 где m 6; Х, - индуктивное сопротив- Rj, - сопротивление фазы синхрон-ление сети.
кого двигателя;Из уравнения 5 определяется угол упRap - сопротивление дросселя. равления выпрямителя:
Р, ч- ( -ь лР., ) R
(I,.,I,)R,
arccos . (7)
Угол управления выпрямителем без Приращение активных потерь регулирования реактивной мощности
р SP i:(2ijtbid + )- -(1)
- I JR- Стоимость потерь за время работы Т
(i. arccos---оТп
э (15)
Корректирующая поправка углаупра- 5- ,
t f . V JJ грд стоимость 1 кВт-ч электровления выпрямителемэнергии.
«, , Общие затраты на компенсацию реДЫ ci- - ot ,V.У}ч.-
активной мощности, которые были бы, ЭДС инвертора при регулировании .,
„35 если бы компенсация осуществлялась
реактивной мощности двигателем, а регулируемым источЕ из + da + Id)R., (10) реактивной мощности
где R5P+ 2Rb;с К Q, + EQT, (16)
Е 2, + (Icl+ д1а)Кз; 40где К - удельные затраты на 1 кВАр
тХBQtЭь /ч источников реактивной мощRi 2Rca + ir- ности,где X jj g - индуктивное сопротивле- - удельные эксплуатационные
ние рассеяния обмоток расходы,
двигателя, Предполагаемое устройство будет - угол опережения управле-эффективно, если выполняется условие ния инвертором при регулировании реактивной Э - С (17) мощностиСовместное решение уравнений (14), Ujj+(Ij+ ( -d 3(15), (16) позволяет получить значеP arccos2 34 Ё приращения условия эко(12)номической целесообразности регулиКорректирующая поправка угла управ-рования реактивной мощности
ления инвертором. 55 1 л + К
. ul, (18)
-Я, (13) К где /3- заданный угол опережения уп- ,д j cQj ijL2j.I , равления инвертором.
Алгоритм функционирования вычислительного блока 17 представлен на фиг.2. Алгоритм обеспечивает определение приращений дЫид, прирадвигатель будет работать с ранее заданным значением скорости и момента. Если ввод корректирующих поправок дЫ и д )3 вызывает меньшее (или .больвходной сигнал регулятора тока изменится на величину
щение тока и его предельное эко- 5 щее) значение д1, то результирующий номическое значение л .
Приращение тока л1 i определяется из уравнения. 1, Приращение активных потерь определяется из выражения
SP Щ (21 , л1 , -к I, )R.
Ш
с1
Напряжение выпрямителя при регулировании реактивной мощности определяется из выражения 4. Угол регулирования вьтрямителя определяется из выражения 7. Угол регулирования выпрямителя d. без регулирования реактивной мощности определяется из выражения 8. Корректирующая поправка
U d определяется из выражения 9. гателя. Для определения значения при- регулирования инвертора при регулиро- ращения тока Ij, при котором стои51, Ij - I, ,
а .Ордсч. dmot;
и регулятор тока отработает выходной сигнал и компенсирует отклонение ё1. Указанное явление возможно по нескольким причинам. Наиболее существенными из них являются нелинейность и неоднозначность регулировочных характеристик выпрямителя и инвертора, вследствие чего без второго контура коррекции по &Ij возможны броски тока I j в силовой цепи вентильного двивании реактивной мощности р определяется из выражения (13).
Так как тариф на электроэнергию меняется в периоды максимумов энергосистемы, алгоритм предусматривает определение нужного для расчетов тарифа на электроэнергию в зависимости от текущего времени суток. Для этого с таймера в микро-ЭВМ вводится текущее время.
Стоимость активных потерь Э при регулировании реактивной мощности с учетом изменения тарифа определяется из выражения (15).
Стоимость реактивной энергии Э при регулировании реактивной мощности с учетом изменения тарифа на электроэнергию определяется из выражения (16).
Вычисленные значения корректирующих сигналов uct и й|3 с выходов вычислительного устройства поступают на вторые входы систем импульсно-фа- зового управления соответствующих преобразовательных устройств, а сигнал приращения д Icj на третий вход регулятора тока выпрямителя вентильного двигателя. При этом возможны следующие случаи.
Отработка системами импульсно-фа- зового управления приращения д d и др вызывает приращение тока fi.lj, по величине равное корректирующей поправке . В этом случае сигнал с регулятора тока не изменится и вентильный
25
30
40
мость потерь активной мощности при регулировании ее меньше стоимости регулируемой реактивной мощности за счет регулируемых тиристорных источников, специально устанавливаемых в промышленных сетях, пятый вход вычислительного устройства связан с выходом таймера.
Если значение тока 41 больше значения ul , то с третьего выхода вычислительного устройства поступает сигнал Ы u,I(j, Так, например, при длительном- режиме работы на про- 35 тяжении интервала времени Т должны учитываться общие затраты на регулируемый источник реактивной мощности С KpQ.,, и эксплуатационные расходы
Cj eQ,T.
При циклической нагрузке .учет экономической эффективности производится аналогичным образом с той лишь разницей, что из общего времени работы установки необходимо взять время, в течение которого есть необходимость регулирования реактивной мощности.
Таким образом, при невыполнении условия (17) значение кода берется 50 постоянным и равным bljq, что учитывается Алгоритмом работы вычислительного устройства.
Положительный эффект от применения изобретения обусловлен тем, что регулирование реактивной мощности во всем диапазоне скоростей осуществля- ется без дополнительных воздействий на механическ то систему двигателя и
55
двигатель будет работать с ранее заданным значением скорости и момента. Если ввод корректирующих поправок дЫ и д )3 вызывает меньшее (или .больвходной сигнал регулятора тока изменится на величину
щее) значение д1, то результирующий
гателя. Для определения значения при- ращения тока Ij, при котором стои51, Ij - I, ,
а .Ордсч. dmot;
и регулятор тока отработает выходной сигнал и компенсирует отклонение ё1. Указанное явление возможно по нескольким причинам. Наиболее существенными из них являются нелинейность и неоднозначность регулировочных характеристик выпрямителя и инвертора, вследствие чего без второго контура коррекции по &Ij возможны броски тока I j в силовой цепи вентильного дви5
0
0
мость потерь активной мощности при регулировании ее меньше стоимости регулируемой реактивной мощности за счет регулируемых тиристорных источников, специально устанавливаемых в промышленных сетях, пятый вход вычислительного устройства связан с выходом таймера.
Если значение тока 41 больше значения ul , то с третьего выхода вычислительного устройства поступает сигнал Ы u,I(j, Так, например, при длительном- режиме работы на про- 5 тяжении интервала времени Т должны учитываться общие затраты на регулируемый источник реактивной мощности С KpQ.,, и эксплуатационные расходы
Cj eQ,T.
При циклической нагрузке .учет экономической эффективности производится аналогичным образом с той лишь разницей, что из общего времени работы установки необходимо взять время, в течение которого есть необходимость регулирования реактивной мощности.
Таким образом, при невыполнении условия (17) значение кода берется 0 постоянным и равным bljq, что учитывается Алгоритмом работы вычислительного устройства.
Положительный эффект от применения изобретения обусловлен тем, что регулирование реактивной мощности во всем диапазоне скоростей осуществля- ется без дополнительных воздействий на механическ то систему двигателя и
5
713
рабочей машины, что позволяет с большой точностью осуществлять процессы регулирования скорости и реактивной мощности. При этом значительно улучшаются динамические режимы не только системы регулирования реактивной мощности, но и системы электропривода в целом, благодаря чему более точно осуществляется отработка управляющих и возмущающих воздей- ствий. Это положение определяет экономическую сторону предполагаемого изобретения. Кроме того, экономический эффект обусловлен также исключением режимов , когда регулирование реактивной мощности не оправдано.
Формула изобретения
Вентильный электропривод, содер- жащий синхронный двигатель, которьш через преобразователь частоты, составленный из последовательно соединенных инвертора и выпрямителя, предназначен для подключения к сети пи- тания, системы импульсно-фазового управления выпрямителем и инвертором с двумя входами каждая, датчик частоты вращения двигателя, выход которого соединен с первым входом регу- лятора скорости, другой вход которог соединен с задатчиком частоты вращения, а выход - с первым-входом регулятора тока, второй вход которого соединен с датчиком тока двигателя,
8
третий вход связан с третьим выходом блока регулирования реактивной мощности, а выход подключён к первому входу системы импульсно-фазового управления выпрямителем, задатчик угла опережения инвертора подключен к первому входу системы импульсно-фазового управления инвертором, датчики реактивной мощности двигателя и сети, выход датчика реактивной мощности сети соединен с первым входомсумматора, второй вход которого подключен к задатчику реактивной мощности, а выход соединен с первым входом блока регулирования реактивной мощности, второй и третий входы которого соединены с датчиком реактивной мощности двигателя и датчиком тока, а выходы подключены к вторым входам систем импульсно-фазового управления выпрямителем и инвертором, о т л и-ч а - ю щ и и с я тем, что, с целью повышения быстродействия при регулировании реактивной мощности и экономичности, введены датчик активной мощности двигателя, таймер, а блок регулирования реактивной мощности выполнен в виде вычислительного блока, реализующего указанный на фиг.2 описания алгоритм и снабженного допол- нительными входами, при этом указанные дополнительные входы вычислительного блока подключены к датчику активной .мощности двигателя и таймеру соответственно.
ввод dOHHbfX Я, Jtf, в,82, tтек.
исчисление A3 а
Siffod af

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| Вентильный электродвигатель | 1983 |
|
SU1141526A1 |
| Электропривод переменного тока | 1986 |
|
SU1431027A1 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| Двухзонный вентильный электродвигатель | 1978 |
|
SU782069A1 |
| Вентильный электродвигатель | 1981 |
|
SU995216A1 |
| Вентильный электропривод | 1984 |
|
SU1277341A1 |
| Гистерезисный электропривод технологической линии (его варианты) | 1984 |
|
SU1264290A1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
Изобретение относится к электротехнике и может быть использовано в системах управления технологических механизмов: компрессоров, вентиляторов, насосов - горной и металлургической промышленности. Целью изобретения является повышение быстродействия при регулировании реактивной мощности и экономичности. Вентильный электропривод снабжен датчиком 4 активной мощности, таймером 18, а блок регулирования реактивной мощности выполнен в виде вычислительного блока 17, снабженного двумя дополнительными входами. Один дополнительный, вход соединен с выходом датчика 4, а второй дополнительный вход - с выходом таймера 18. Введение указанных блсхов позволяет обеспечить регули- рование реактивной мощности во всем диапазоне частот вращения без дополнительных воздействий на механическую систему двигателя. Это позволяет с большой точностью осуществлять процессы регулирования реактивной мощности. 2 ил. с $ (Л со о о О5 х
Вычисление ytt
Вычисление
Вычисление «
Вычисление tv
Вычисление
Определение
текущего
та/зифа
Вычисление
А Увз
BbiwMeHUf
Af
SbitaS
4К
Редактор И.Сегляник
fpus.2
Составитель В.Тарасов Техред М.Ходанич
Заказ 1158/55Тираж 661Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Вы9од А 3tl
Корректор И.Муска
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1206909, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
