Изобретение относится к системам управления вентильными электродвигателями вращения антенны радиолокационной станции (РЛС) и может быть использовано в регулируемых электроприводах радиоэлектронных систем.
В настоящее время в связи с появлением новых средств воздушного нападения возросли требования к системам воздушно-космической обороны по обнаружению низколетящих высокоскоростных объектов. Поэтому современные РЛС все чаще проектируются с активными фазированными антенными решетками, дающими возможность, несмотря на большие габариты и массу полотен антенн, новому поколению РЛС иметь высокие тактико-технические показатели.
Особенностью современных РЛС является то, что в ее автономной системе электроснабжения есть две соизмеримые по мощности и переменные по величине нагрузки - передающее устройство и электродвигатель вращения антенны. Каждая из них может составлять до 30…35% мощности дизель-генератора (РЛС является автономным объектом с первичным источником питания - генератором ограниченной мощности). В связи с этим очень важно найти оптимальный вариант управления их режимами. Таким образом, одной из основных систем современных РЛС является регулируемый электропривод вращения антенны, от качественной работы которого зависит эффективность работы всей РЛС.
Известна система управления вентильным электродвигателем вращения антенны РЛС [1, рис.7], содержащая трехфазный выпрямитель, фильтр (дроссель, конденсатор), четыре датчика тока, датчик напряжения, устройство торможения, инвертор, блок драйверов, устройство управления, датчик угла поворота антенны, вентильный электродвигатель и антенну.
Обычно РЛС подобного типа имеют три угловые скорости вращения антенны, например 12, 6, 3 об/мин [2]. Это связано с режимами работы РЛС и ветровыми нагрузками на полотно антенны. Дело в том, что при больших ветровых нагрузках возрастает ток в цепях статора вентильного электродвигателя. Два датчика тока передают соответствующий сигнал в блок управления, и происходит переход на пониженную угловую скорость вращения антенны (далее по тексту - скорость вращения антенны).
В то же время, возможно, такого большого снижения скорости вращения антенны и не требуется.
Следует отметить, что при большой ветровой нагрузке осуществляется переход на пониженную скорость вращения антенны, например с 12 об/мин на 6 об/мин, что снижает вдвое такие тактические характеристики РЛС, как скорость обзора и, как следствие, надежность сопровождения высокоскоростных целей.
Кроме того, при пуске антенны и переходе с одной скорости вращения антенны на другую могут возникнуть ускорения, вызывающие динамические перегрузки, которые резко увеличивают износ электропривода и сокращают срок службы.
Выбор вентильного электродвигателя осуществляется по величине его номинального момента, равного эквивалентному моменту сопротивления на валу при постоянной скорости вращения антенны. Так что запас по мощности вентильного электродвигателя составляет 20…30% [2], из-за чего необходимо применять электродвигатель с большей номинальной мощностью, более дорогой, имеющий большие массу и габариты. Следует также отметить, что вентильный электродвигатель имеет максимальный коэффициент полезного действия (КПД) при номинальной нагрузке на валу.
Следовательно, при использовании электродвигателя с 20…30% запасом по номинальной мощности приводит к его эксплуатации в неоптимальном режиме.
При постоянной скорости вращения антенны, в течение одного оборота происходит увеличение потребляемой мощности на 20…30%, в связи с чем требуется генератор с соответственно большей номинальной мощностью. Такой генератор имеет более высокую стоимость, массу и габариты.
Известна также система управления вентильным электродвигателем вращения антенны РЛС [3], которая является наиболее близкой по технической сущности и принята за прототип. Она включает в себя дизель, генератор, два выпрямителя, фильтр, два датчика напряжения, три датчика тока, устройство коррекции мощности, «N» полупроводниковых преобразователей, «N» передающих устройств, устройство торможения, инвертор, блок драйверов, блок управления инвертором, вентильный электродвигатель, датчик скорости, датчик угла поворота антенны, антенну, датчик величины изгиба полотна антенны, редуктор и устройство коррекции скорости с соответствующими связями.
В рассматриваемой системе управления вентильным электродвигателем выравнивание тока, потребляемого от генератора, осуществляется в течение оборота антенны изменением частоты следования зондирующих импульсов, генерируемых передающим устройством.
Область применения системы прототипа ограничена из-за небольшого допустимого диапазона изменения частоты следования зондирующих импульсов РЛС. Это связано с тем, что увеличение частоты ограничивается требованиями по дальности действия РЛС, по обеспечению специальных режимов РЛС и т.д.
Таким образом, эффективно устранить модуляцию напряжения на выходе генератора можно только при сравнительно небольшой ветровой нагрузке на антенну и малой скорости вращения антенны, то есть когда происходит небольшое изменение момента на валу вентильного электродвигателя в течение одного оборота антенны.
В режиме кругового обзора при небольшой скорости вращения антенны уменьшается скорость обзора и, следовательно, надежность сопровождения высокоскоростных целей, что ограничивает область применения системы управления вентильным электродвигателем вращения антенны.
Техническим результатом изобретения является улучшение тактико-технических и эксплуатационно-экономических характеристик системы управления вентильным электродвигателем вращения антенны РЛС, а именно сохранение скорости обзора при изменении ветровой нагрузки на полотно антенны, следовательно, увеличение надежности сопровождения высокоскоростных целей, уменьшение номинальной мощности электродвигателя, что приводит к увеличению КПД регулируемого электропривода, уменьшению стоимости, массы, а также улучшению электромагнитной совместимости.
Технический результат достигается тем, что в систему управления вентильным электродвигателем вращения антенны РЛС, включающую выпрямитель, инвертор, вентильный электродвигатель, на валу ротора которого установлены датчик скорости и редуктор, выходная ось которого механически соединена с валом антенны, последовательно соединенные преобразователь напряжения и приемопередающие устройства, входами-выходами соединенные с диполями антенны, а также расположенный на антенне датчик величины изгиба ее полотна, выход которого через устройство коррекции скорости, блок управления инвертором и блок драйверов соединен со вторым входом инвертора, причем второй вход блока управления инвертором соединен с первым выходом датчика скорости, а вход выпрямителя подключен к системе автономного электроснабжения (САЭС) [4], вводятся последовательно соединенные аналого-цифровой преобразователь и диаграммообразующая система [5], в состав которой входят электронно-вычислительная машина (ЭВМ), фазовращающие устройства и т.д. (на фигуре не показаны). При этом выход диаграммообразующей системы соединен со вторыми входами приемопередающих устройств, а вход аналого-цифрового преобразователя - со вторым выходом датчика скорости. Вход преобразователя напряжения подключен к САЭС. Выход выпрямителя подключен к первому входу инвертора, выход которого подключен к входу вентильного электродвигателя.
Выравнивание мощности, потребляемой регулируемым электроприводом, в течение оборота антенны происходит следующим образом. При большой ветровой нагрузке момент сопротивления на валу вентильного электродвигателя увеличивается при соответственном уменьшении скорости вращения антенны. Мощность, потребляемая регулируемым электроприводом, практически не возрастает.
При уменьшении ветровой нагрузки момент сопротивления на валу вентильного электродвигателя уменьшается при соответственном увеличении скорости вращения. Мощность, потребляемая регулируемым электроприводом, практически не уменьшается. Таким образом, при неизменной средней скорости ветра время одного оборота антенны не меняется, при этом среднее за оборот значение момента на валу вентильного электродвигателя также остается постоянным при практически постоянной в течение всего оборота потребляемой мощности. В то же время диаграммообразующая система, управляя приемопередающими устройствами и используя информацию от датчика скорости, позволяет осуществлять электронное сканирование диаграммы направленности антенны в горизонтальной плоскости так, чтобы скорость вращения диаграммы направленности оставалась примерно постоянной.
Таким образом, при переменной нагрузке на валу вентильного электродвигателя происходит выравнивание мощности, потребляемой регулируемым электроприводом от САЭС в течение одного оборота антенны, при этом перемещение диаграммы направленности в горизонтальной плоскости происходит практически с постоянной скоростью.
На фигуре представлена структурная схема системы управления вентильным электродвигателем вращения антенны РЛС, где приняты следующие обозначения:
1 - САЭС;
2 - преобразователь напряжения;
3 - выпрямитель;
4 - приемопередающие устройства;
5 - инвертор;
6 - блок драйверов;
7 - блок управления инвертором;
8 - устройство коррекции скорости;
9 - диаграммообразующая система;
10 - вентильный электродвигатель;
11 - аналого-цифровой преобразователь;
12 - датчик скорости;
13 - датчик величины изгиба полотна антенны;
14 - редуктор.
Система управления вентильным электродвигателем вращения антенны РЛС содержит преобразователь напряжения 2 и выпрямитель 3, входами соединенные с САЭС 1 (например, сеть электроснабжения общего назначения или дизель-генератор). Выход выпрямителя 3 подключен к первому входу инвертора 5, выходом подключенного к вентильному электродвигателю 10. Вал вентильного электродвигателя 10 механически соединен с редуктором 14, выходная ось которого, в свою очередь, механически соединена с валом антенны. Выход преобразователя напряжения 2 подключен к первым входам приемопередающих устройств 4, входами-выходами соединенных с диполями антенны, а вторые входы - с выходом диаграммообразующей системы 9, вход которой соединен с выходом аналого-цифрового преобразователя 11.
На валу ротора вентильного электродвигателя 10 установлен датчик скорости 12. Первый выход датчика скорости 12 подсоединен ко второму входу блока управления 7 инвертором 5 и через блок драйверов 6 - ко второму входу инвертора 5. Второй выход датчика скорости 12 подключен к входу аналого-цифрового преобразователя 11.
Выход датчика величины изгиба 13 полотна антенны через устройство коррекции скорости 8 подключен к первому входу блока управления 7 инвертором 5.
Система управления вентильным электродвигателем антенны РЛС работает следующим образом.
Включается САЭС 1, на выходе которой появляется трехфазное напряжение 380 В, 50 Гц, подаваемое на входы выпрямителя 3 и преобразователя напряжения 2. С выхода преобразователя напряжения 2 постоянное напряжение поступает на первые входы приемопередающих устройств 4. Одновременно требуемые напряжения питания подаются на другие блоки и устройства системы управления (на фигуре не обозначены). Входы-выходы приемопередающих устройств 4 обеспечивают передачу зондирующих импульсов и прием отраженных сигналов через диполи антенны. Суммарное поле диполей образуют диаграмму направленности.
С выхода выпрямителя 3 постоянное напряжение подается на первый вход инвертора 5.
Блок управления 7 инвертором 5 подает импульсы на вход блока драйверов 6, который формирует импульсы для управления транзисторами инвертора 5.
Трехфазное напряжение с инвертора 5 подается на вход вентильного электродвигателя 10. Начинается плавный разгон вентильного электродвигателя 10, редуктора 14 и антенны.
Разгон вентильного электродвигателя 10 осуществляется до заданной величины скорости вращения антенны, определяемой с помощью датчика скорости 12. Сигнал с первого выхода датчика скорости 12 подается на второй вход блока управления 7 инвертором 5, который через блок драйверов 6 и инвертор 5 осуществляет соответствующее воздействие на вентильный электродвигатель 10.
В процессе вращения при возрастании ветровой нагрузки происходит изгиб полотна антенны больше допустимой величины. Поскольку полотно антенны имеет ограниченную жесткость конструкции, то с выхода датчика величины изгиба 13 полотна антенны, представляющего собой совокупность тензорезисторов, прикрепленных к несущей конструкции антенны (действие тензорезисторов основано на принципе изменения сопротивления металлов и полупроводников под действием деформации), соответствующий сигнал подается на вход устройства коррекции скорости 8. С выхода устройства коррекции скорости 8 сигнал подается на первый вход блока управления 7 инвертором 5. Здесь сигнал проходит обработку и передается на блок драйверов 6, далее - последовательно на инвертор 5 и на вентильный электродвигатель 10, в результате чего скорость вращения антенны уменьшается.
В процессе вращения при уменьшении ветровой нагрузки датчик величины изгиба 13 полотна антенны формирует соответствующий сигнал, момент на валу вентильного электродвигателя 10 увеличивается и, как следствие, скорость вращения антенны возрастает.
Таким образом, время одного оборота антенны не изменяется и средняя скорость вращения в течение одного ее оборота остается постоянной.
Дальнейшее вращение антенны происходит при допустимой величине изгиба. Вследствие этого скорость вращения антенны в течение одного ее оборота зависит от величины изгиба полотна антенны.
Таким образом, ограничением для скорости вращения антенны является не перегрузка вентильного электродвигателя 10 по току, а прочностные характеристики антенны (допустимая величина изгиба). Со второго выхода датчика скорости 12 сигнал подается на аналого-цифровой преобразователь 11 и далее на ЭВМ диаграммообразующей системы 9, где по определенной программе, основанной на пропорциональной зависимости выходного сигнала датчика скорости 12 от текущей скорости вращения антенны, формируются сигналы управления приемопередающими устройствами 4, влияющими на горизонтальное положение диаграммы направленности антенны, а затем - на вторые входы приемопередающих устройств 4. Соответствующий сигнал управления диаграммообразующей системы 9 осуществляет требуемое сканирование диаграммы направленности.
При постоянной скорости вращения антенны (антенна вращается в одну сторону по часовой стрелке) диаграмма направленности в горизонтальной плоскости не смещается (остается перпендикулярной полотну антенны). При наличии ветра и сохранении постоянной средней скорости вращения в течение одного оборота происходит периодическое (с частотой вращения антенны) изменение ее текущей скорости вращения, что фиксируется датчиком скорости 12 и аналого-цифровым преобразователем 11, вследствие чего происходит периодическое смещение направления диаграммы направленности с той же частотой в противофазе со скоростью, пропорциональной переменной составляющей выходного сигнала датчика скорости 12.
При уменьшении скорости вращения антенны начинается смещение диаграммы направленности в направлении вращения антенны. Таким образом, скорость перемещения диаграммы направленности в горизонтальной плоскости остается постоянной.
При увеличении скорости вращения антенны начинается смещение диаграммы направленности в направлении, противоположном вращению антенны. Таким образом, скорость перемещения диаграммы направленности в горизонтальной плоскости также остается постоянной.
Обратная связь датчика величины изгиба 13 полотна антенны обеспечивает скорость вращения антенны примерно пропорциональную моменту на валу вентильного электродвигателя 10 или его току питания.
В зависимости от положения антенны относительно направления ветра из-за изменения ветровой нагрузки на антенну (а следовательно, и на вал электродвигателя) в течение одного оборота происходит соответствующее изменение скорости вращения.
При поперечном положении антенны относительно направления ветра происходит увеличение ветровой нагрузки и уменьшение скорости вращения, которая фиксируется датчиком скорости 12. Момент сопротивления на валу вентильного электродвигателя 10 увеличивается, а его скорость уменьшается. Мощность, потребляемая регулируемым электроприводом, практически не возрастает.
При продольном положении антенны относительно направления ветра происходит уменьшение ветровой нагрузки и увеличение скорости вращения, которая фиксируется датчиком величины изгиба 13 полотна антенны. Момент сопротивления на валу вентильного электродвигателя 10 уменьшается, а скорость вращения его вала возрастает. Мощность, потребляемая регулируемым электроприводом, практически не уменьшается. РЛС потребляет от САЭС 1 практически постоянную мощность.
Использование предлагаемой системы управления позволяет РЛС работать при большом изменении скорости вращения за время одного оборота антенны. В системе управления вентильным электродвигателем не происходит большого увеличения момента сопротивления на валу, нет необходимости перехода на пониженную скорость вращения, что приводит к уменьшению скорости обзора РЛС.
В предлагаемой системе за время одного оборота антенны при возрастании момента сопротивления на валу происходит соответствующее уменьшение скорости вращения, а при уменьшении момента сопротивления - соответствующее увеличение скорости вращения. В то же время за счет применения электронного сканирования скорость перемещения диаграммы направленности в горизонтальной плоскости не изменяется.
При отсутствии пониженной скорости вращения антенны скорость обзора и надежность сопровождения высокоскоростных целей сохраняются.
При высоких скоростях маневра современных аэродинамических воздушных и космических объектов изменение (уменьшение) скорости обзора пространства (темпа выдачи данных) чревато потерей цели.
Потребление мощности от САЭС 1 регулируемым электроприводом и приемопередающими устройствами 4 практически остается постоянным.
Постоянство мощности, потребляемой регулируемым электроприводом и приемопередающими устройствами 4, устраняет возможность перегрузки САЭС 1 ограниченной мощности и обеспечивает ее устойчивую работу.
Выбор вентильного электродвигателя осуществляется по величине его номинального момента, равного эквивалентному моменту сопротивления на валу. При использовании предлагаемой системы управления момент на валу уменьшается, при этом номинальная мощность вентильного электродвигателя уменьшается на 20…30%. Таким образом, снижается стоимость электродвигателя, его масса и габариты.
Следует также отметить, что электродвигатель имеет максимальный КПД при номинальной нагрузке на валу. Следовательно, возрастает КПД вентильного электродвигателя.
Если снижается мощность вентильного электродвигателя, то для его питания требуется САЭС 1 с дизель-генератором меньшей номинальной мощности. Он также будет иметь меньшую стоимость, массу и габариты.
Предлагаемая система управления вентильным электродвигателем вращения антенны РЛС оптимальна с точки зрения электромагнитной совместимости, а именно: потребляемая мощность на валу вентильного электродвигателя практически постоянна. В результате потребляемая от источника напряжения мощность выравнивается, электромагнитная совместимость возрастает, что положительно влияет на эффективность работы РЛС в целом.
Уменьшение номинальной мощности электродвигателя и улучшение электромагнитной совместимости при улучшении других указанных тактико-технических и эксплуатационно-экономических характеристик системы управления вентильным электродвигателем и РЛС в целом достигнуто благодаря обратным связям цепочек признаков «датчик величины изгиба 13 полотна антенны, устройство коррекции скорости 8, блок управления 7 инвертором 5, блок драйверов 6, инвертор 5, вентильный электродвигатель 10, редуктор 14» и «вентильный электродвигатель 10, датчик скорости 12, блок управления 7 инвертором 5, блок драйверов 6, инвертор 5, вентильный электродвигатель 10» и введению в патентуемую систему отличительных признаков с соответствующими связями.
Таким образом, введение диаграммообразующей системы, содержащей ЭВМ и фазовращающие устройства, и аналого-цифрового преобразователя в систему управления вентильным электродвигателем вращения антенны РЛС, содержащую выпрямитель, инвертор, вентильный электродвигатель, датчик скорости, редуктор, устройство коррекции скорости, блок управления инвертором, блок драйверов, датчик величины изгиба полотна антенны, преобразователь напряжения и приемопередающие устройства с соответствующими связями, позволило улучшить тактико-технические и эксплуатационно-экономические характеристики системы.
Источники информации
1. Кириенко В.П., Стрелков В.Ф., Тетенькин Л.В. Система электропитания радиолокационного комплекса / Сборник докладов 1-й Всероссийской конференции по средствам электропитания. Санкт-Петербург, 2007, с.21-27.
2. Хватов С.В., Стрелков В.Ф., Тетенькин Л.В. Оптимизация режимов работы электроприводов вращения антенно-мачтовых устройств РЛС / Известия ТулГУ. Тула, 2010, с.186-190.
3. Патент на изобретение РФ №2450394 «Система управления вентильным электродвигателем вращения антенны РЛС», авторы: Хватов С.В., Стрелков В.Ф., Ваняев В.В., опубл. 10.05.2012, МПК H01Q 7/00.
4. Источники электропитания электронных средств / Костиков В.Г., Парфенов Ε.М., Шахнов В.А. - М.: Горячая линия - телеком, 2001. - 344 с.
5. Активные фазированные антенные решетки / Под ред. Д.И. Воскресенского и А.И. Канащенкова. - М.: Радиотехника, 2004. - 488 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2011 |
|
RU2450394C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2018 |
|
RU2677690C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2014 |
|
RU2554107C1 |
| Система управления приводами антенны станции наведения | 2022 |
|
RU2794200C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РЛС ДЕЦИМЕТРОВОГО ДИАПАЗОНА | 2008 |
|
RU2394253C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ПРИВОД ШАХТНОЙ ВЕНТИЛЯЦИОННОЙ УСТАНОВКИ | 2016 |
|
RU2714890C2 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| ИСТОЧНИК ЭЛЕКТРОПИТАНИЯ АППАРАТУРЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2013 |
|
RU2534028C1 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
| ВЫСОКОВОЛЬТНЫЙ РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2382480C2 |
Изобретение относится к системам управления вентильными электродвигателями вращения антенны радиолокационной станции (РЛС) и может быть использовано в регулируемых электроприводах. Техническим результатом изобретения является улучшение тактико-технических и эксплуатационных характеристик системы управления вентильным электродвигателем вращения антенны РЛС. Технический результат достигается тем, что в систему управления вентильным электродвигателем вращения антенны РЛС, содержащую инвертор, вентильный электродвигатель, датчик скорости, редуктор, приемопередающие устройства, датчик величины изгиба полотна антенны, устройство коррекции скорости, блок управления инвертором и блок драйверов, вводятся диаграммообразующая система и аналого-цифровой преобразователь и, соответственно, новые связи между элементами, которые позволяют выравнивать скорость обзора пространства при изменении ветровой нагрузки на полотно антенны. Постоянство скорости обзора пространства, достигаемое за счет электронного сканирования диаграммы направленности в противофазе со скоростью вращения антенны, обеспечивает увеличение надежности сопровождения высокоскоростных целей. Ограничение скорости вращения антенны по допустимой величине изгиба, достигаемое за счет соответствующих связей между инвертором, вентильным электродвигателем, датчиком скорости, редуктором, датчиком величины изгиба полотна антенны, устройством коррекции скорости, блоком управления инвертором и блоком драйверов, приводит к уменьшению номинальной мощности электродвигателя и к увеличению коэффициента полезного действия (КПД) регулируемого электропривода. 1 ил.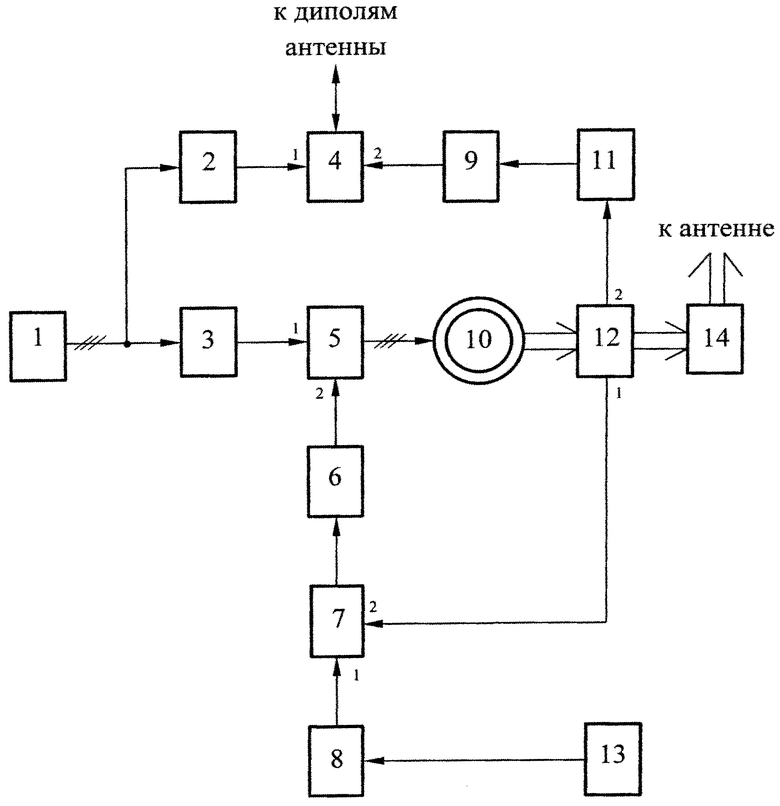
Система управления вентильным электродвигателем вращения антенны радиолокационной станции (РЛС), включающая выпрямитель, инвертор, вентильный электродвигатель, на валу ротора которого установлены датчик скорости и редуктор, выходная ось которого механически соединена с валом антенны, преобразователь напряжения, выходом подключенный к первым входам приемопередающих устройств, входами-выходами соединенных с диполями антенны, а также расположенный на антенне датчик величины изгиба ее полотна, выход которого через устройство коррекции скорости, блок управления инвертором и блок драйверов соединен со вторым входом инвертора, причем второй вход блока управления инвертором соединен с первым выходом датчика скорости, а вход выпрямителя подключен к системе автономного электроснабжения, отличающаяся тем, что в нее введены последовательно соединенные аналого-цифровой преобразователь и диаграммообразующая система, выход которой соединен со вторыми входами приемопередающих устройств, вход аналого-цифрового преобразователя - со вторым выходом датчика скорости, а вход преобразователя напряжения подключен к системе автономного электроснабжения, выход выпрямителя подключен к первому входу инвертора, выход которого соединен с входом вентильного электродвигателя.
| СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2011 |
|
RU2450394C1 |
| Приспособление к металлорежущим станкам для центрирования крупногабаритных деталей | 1951 |
|
SU94087A1 |
| Установка для сортировки шаров | 1959 |
|
SU127958A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ | 1999 |
|
RU2149438C1 |
| ГИБРИДНАЯ ЗЕРКАЛЬНАЯ СКАНИРУЮЩАЯ АНТЕННА ДЛЯ МНОГОРЕЖИМНОГО КОСМИЧЕСКОГО РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2009 |
|
RU2392707C1 |
| US 5166693 A, 24.11.1992 | |||

