Изобретение относится к управлению электродвигателями вращения антенн радиолокационных станций (РЛС) и может быть использовано в регулируемых электроприводах (РЭП).
В настоящее время, в связи с появлением новых средств воздушного нападения, возросли требования к системам воздушно-космической обороны по обнаружению маневренных и высокоскоростных объектов. Поэтому современные РЛС все чаще проектируются с активными фазированными антенными решетками (АФАР), обеспечивающими электрическое горизонтальное и вертикальное сканирование диаграммы направленности антенны (ДНА).
Особенностью современных РЛС является то, что в ее автономной системе электроснабжения одной из самых мощных нагрузок является РЭП вращения антенны. Его потребляемая мощность составляет 20-25% от мощности дизель-генератора. Технико-эксплуатационные показатели РЭП оказывают влияние на тактико-технические характеристики (ТТХ) РЛС.
РЛС является автономным объектом с первичным источником питания - генератором ограниченной мощности. В связи с чем, крайне важно найти рациональный вариант управления режимами работы РЭП, от качественной работы которого зависит эффективность работы всей РЛС.
Из уровня техники известно несколько аналогов предлагаемой системы управления.
Первым аналогом является система управления РЭП, которая обеспечивает постоянство скорости вращения антенно-мачтового устройства (АМУ). Эта система реализуется на базе РЭП РЛС [1], состоящей из дизель-генератора, автотрансформатора (АТР), асинхронного двигателя с короткозамкнутым ротором (АД КЗ), электромашинного усилителя (ЭМУ), двигателя постоянного тока (ДПТ).
В этой системе к генератору электропривод подключен «гонным» для ЭМУ асинхронным двигателем, у которого при пуске ток в обмотках статора превышает номинальный в 5-7 раз. При подключении АД КЗ к генератору ограниченной мощности наблюдается провал напряжения и сети, что снижает электромагнитную совместимость электропривода.
Для обеспечения пуска АД КЗ необходимо устанавливать токоограничивающие элементы: резисторы, дроссели, автотрансформаторы, что приводит к возрастанию массы и габаритов электропривода. Происходит снижение надежности, так как для коммутации токоограничивающих элементов применяются электромеханические устройства: реле, контакторы.
Недостатки такого РЭП заключаются в следующем:
- исполнительным является коллекторный двигатель постоянного тока (ДПТ), ненадежно работающий в сложных климатических условиях;
- применяются токоограничивающие и электромеханические элементы, осуществляющие пуск «гонного» для ЭМУ АД КЗ, что ухудшает массогабаритные показатели и снижает надежность.
Вторым аналогом является система управления вентильным электродвигателем вращения антенны РЛС [2], которая также обеспечивает постоянство скорости вращения антенны, а при управлении электродвигателем вращения антенны РЛС используется сигнал, пропорциональный току статора электродвигателя, и сигнал, пропорциональный скорости вращения электродвигателя, воздействующие на инвертор для обеспечения постоянной скорости вращения ротора электродвигателя и отключение его при превышении током статора допустимой величины.
Эта система, содержит входные клеммы, выпрямитель, фильтр (дроссель, конденсатор), датчики тока, датчик напряжения, схему торможения, инвертор, блок драйверов, устройство управления, датчик угла поворота ротора, являющийся датчиком скорости, электродвигатель.
Обычно РЛС в которых используются системы управления подобного типа имеют три угловые скорости вращения антенны, например, 12, 6, 3 об/мин. Это связано с режимами работы РЛС и ветровыми нагрузками на полотно антенны.
В статье [3] приведены графики зависимости момента на валу двигателя от угла поворота антенны, скорости ветра и скорости вращения антенны. Из графиков следует, что момент на валу электродвигателя имеет большую переменную составляющую. Номинальная мощность электродвигателя выбирается исходя из эквивалентного (среднеквадратичного) момента на его валу [3]. Наименьшая величина эквивалентного момента на валу электродвигателя имеет место при минимальной величине его переменной составляющей. В этом случае среднеквадратичное значение момента равно его среднему значению, а среднеквадратичная мощность на валу электродвигателя равна величине его средней мощности.
Поскольку выбор электродвигателя осуществляется по величине его среднеквадратичного момента на валу, то из-за ветровой нагрузки запас по номинальной мощности электродвигателя составляет 25-30%. Таким образом, приходится применять более дорогой электродвигатель, имеющий большие массу и габариты. Следует также отметить, что электродвигатель имеет максимальный КПД и коэффициент мощности при номинальной нагрузке на валу. Следовательно, электродвигатель завышенной мощности эксплуатируется не в оптимальном режиме.
Если выбор электродвигателя осуществляется по величине его среднеквадратичного момента на валу, то генератор также должен иметь увеличенное значение номинального тока и определенный запас по мощности. Следовательно, он также будет иметь большую стоимость, массу и габариты.
Наличие большой переменной составляющей мощности на валу электродвигателя обуславливает большую переменную составляющую мощности, потребляемой им от дизель-генератора.
Переменная составляющая потребляемой электродвигателем мощности вызывает перегрузки дизель-генератора ограниченной мощности и обуславливает его неустойчивую работу. Снижается электромагнитная совместимость РЭП. Ухудшается тактическая характеристика РЛС -функциональная надежность [4].
Отмеченные недостатки имеются в системе [2]. В целом ухудшается технико-экономические характеристики РЛС: надежность, электромагнитная совместимость, масса, габариты, стоимость, что и ограничивает область применения системы управления электродвигателем вращения антенны РЛС.
Наиболее близким аналогом, принятым за прототип, является техническое решение, описанное в патенте на изобретение «Способ и система управления вентильным электродвигателем вращения антенны РЛС» [5].
При таком способе управления электродвигателем допускают отклонение скорости вращения антенны РЛС в пределах, определенных как 10% от номинального значения.
Как было установлено, отклонение скорости вращения антенны на 10%, позволяет уменьшить пульсации мощности на валу электродвигателя в 2,25 раза и, следовательно, уменьшить номинальную мощность электродвигателя на 26% [6].
Этот способ реализуется системой управления электродвигателем вращения антенны РЛС, включающей в себя входные клеммы выпрямителя, выпрямитель, инвертор, электродвигатель, датчик тока, датчик скорости, блок управления инвертором и блок драйверов, в которую введены устройство коррекции момента и вычислители: мощности, коэффициента пульсаций мощности, параметров скорости вращения (ее среднего значения и амплитуды переменной составляющей), коэффициента пульсаций скорости с соответствующими связями.
При постоянной скорости вращения антенны положение полотна антенны и положение ДНА совпадают. Изменение скорости вращения антенны в допустимых пределах не отражается на работе РЛС, однако изменение скорости вращения антенны больше допустимого ведет за собой появление рассогласование между ожидаемым положением ДНА в пространстве и фактическим положением антенны.
Превышение допустимого диапазона изменения скорости вращения, которое необходимо для уменьшения пульсаций мощности, возросших например, из-за увеличения ветровой нагрузки на антенное полотно, приводит к снижению ТТХ РЛС, в частности, скорости обзора и вероятности правильного обнаружения цели.
Таким образом, существенным недостатком прототипа является узкий, не превышающий 10% от номинального значения, диапазон допустимого изменения скорости вращения антенны.
Кроме того, узкий диапазон допустимого изменения скорости вращения антенны не позволяет в должной степени:
- уменьшить номинальную мощность электродвигателя, инвертора РЭП и генератора;
- обеспечить высокий КПД и коэффициент мощности электродвигателя;
- уменьшить стоимость, массу и габариты РЭП и генератора;
- повысить электромагнитную совместимость РЭП;
Техническим результатом изобретения является расширение диапазона допустимого изменения скорости вращения антенны.
Это позволяет при большой ветровой нагрузке на антенну, т.е. высокой скорости ветра, высокой скорости вращения антенны и ограниченном угле электрического сканирования ДНА обеспечить постоянство скорости вращения ДНА в пространстве и потребляемой от сети мощности, а также значительно уменьшить пульсации момента на валу электродвигателя.
Следствием этого является улучшение технико-экономических характеристик РЭП, а именно электромагнитной совместимости [4], снижение массы, габаритов, стоимости, за счет появления возможности использовать электродвигатель меньшей мощности из-за уменьшения переменной составляющей мощности на валу электродвигателя (переменной составляющей тока статора, момента на валу электродвигателя), повышение функциональной надежности [4].
В предлагаемом решении среднеквадратичное значение мощности на валу электродвигателя приближается к среднему значению этой мощности, что снижает номинальную мощность электродвигателя. При номинальной нагрузке на валу, электродвигатель имеет максимальный КПД и коэффициент мощности. Следовательно, электродвигатель эксплуатируется в оптимальном режиме.
Также уменьшается мощность, потребляемая от дизель-генератора, что приводит к снижению его номинальной мощности. Происходит снижение массы, габаритов и стоимости дизель-генератора.
В режиме переменной скорости вращения вала электродвигателя при увеличении ветровой нагрузки не происходит увеличение момента сопротивления на валу электродвигателя, и нет необходимости переходить на пониженную скорость вращения антенны.
При воздействии ветровой нагрузки на антенное полотно скорость его вращения изменяется в противофазе с его моментом сопротивления, однако происходит компенсация электрическим вращением диаграммы направленности, в результате темп обновления информации остается постоянным. Вследствие вышесказанного, происходит увеличение ТТХ РЛС: скорости обзора, вероятности правильного обнаружения цели.
Технический результат достигается за счет того, что в прототип, содержащий входные клеммы выпрямителя и выпрямитель, инвертор, блок драйверов, блок управления инвертором, устройство коррекции момента, датчик тока, вычислитель мощности, вычислитель коэффициента пульсаций мощности, электродвигатель, датчик скорости, вычислитель параметров скорости вращения и вычислитель коэффициента пульсаций скорости с соответствующими связями дополнительно введены вычислитель угла электрического сканирования, переключатель режимов работы, флэш-память, приемо-передающие модули, диаграммо-образующая система и анемометр.
При этом третий выход вычислителя параметров скорости вращения подключен к входу вычислителя угла электрического сканирования, выход которого подключен к первому входу переключателя режимов работы, который в свою очередь, подключен первым выходом к четвертому входу вычислителя мощности.
Выход флэш-памяти подсоединен ко второму входу переключателя режимов работы.
Выход анемометра подключен к третьему входу переключателя режимов работы, второй выход которого присоединен к входу диаграммо-образующей системы, выходы которой подключены к входам приемо-передающих модулей. Выходы приемо-передающих модулей подключены к излучателям антенны.
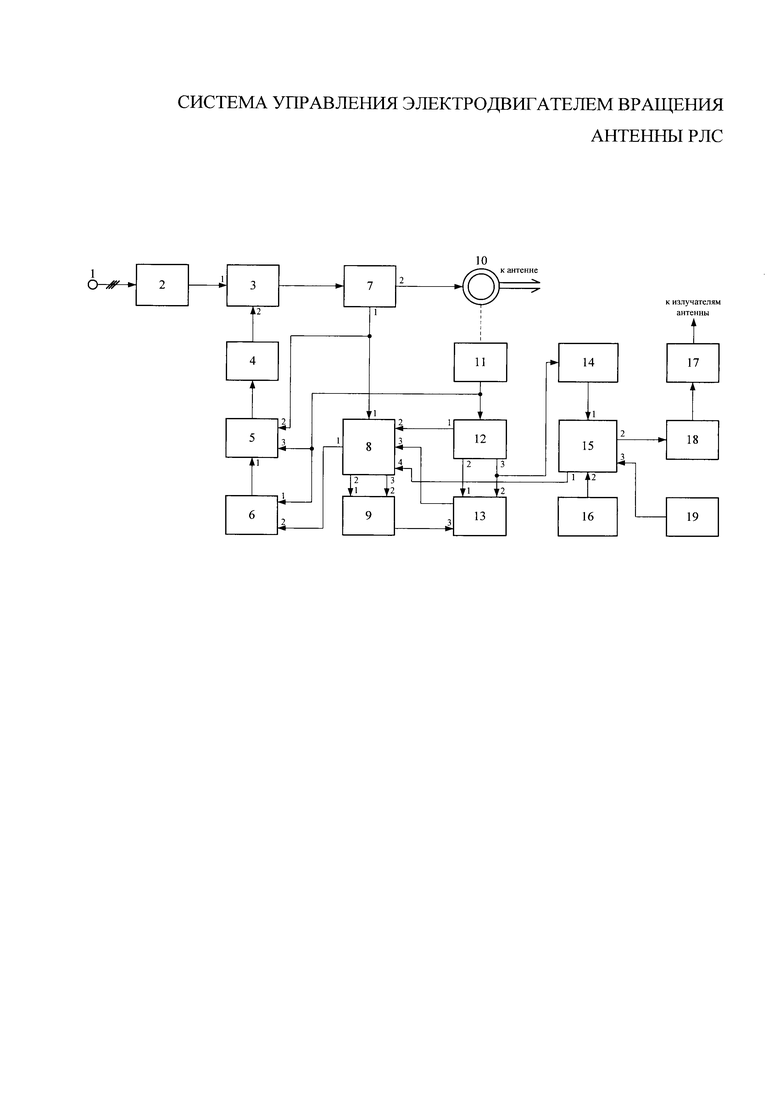
На фигуре представлена структурная схема системы управления электродвигателем вращения антенны РЛС и приняты следующие обозначения:
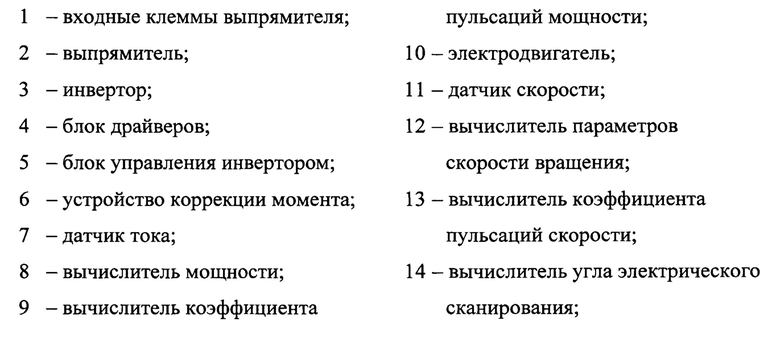

Система управления электродвигателем вращения антенны РЛС, содержит: входные клеммы выпрямителя 1, выпрямитель 2, инвертор 3, электродвигатель 10, датчик тока 7, датчик скорости 11, блок управления инвертором 5, блок драйверов 4, устройство коррекции момента 6, переключатель режимов работы 15, флэш-память 16, приемо-передающие модули 17, диаграммо-образующую систему 18, анемометр 19, вычислители: мощности 8, коэффициента пульсаций мощности 9, параметров скорости вращения 12, коэффициента пульсаций скорости 13, угла электрического сканирования 14.
В качестве электродвигателя 10 может быть, использован вентильный электродвигатель или АД КЗ [7]. При этом выход генератора (на фигуре не изображен) подключен к входным клеммам 1 выпрямителя 2. Выход выпрямителя 2 подключен к первому входу инвертора 3. Выход инвертора 3 соединен с входом датчика тока 7, второй выход датчика тока 7, подключен к электродвигателю 10. Вал электродвигателя 10 механически соединен с датчиком скорости 11, и с редуктором, который, в свою очередь, механически соединен с антенной (на фигуре не изображены).
Первый выход датчика тока 7 подключен ко второму входу блока управления инвертором 5 и к первому входу вычислителя мощности 8, первый выход которого соединен со вторым входом устройства коррекции момента 6. Второй и третий выходы вычислителя мощности 8 соединены с первым и вторым входами вычислителя коэффициента пульсаций мощности 9, соответственно, выход которого соединен с третьим входом вычислителя коэффициента пульсаций скорости 13.
На валу электродвигателя 10 установлен датчик скорости 11. При этом выход датчика скорости 11 одновременно подсоединен к третьему входу блока управления инвертором 5, к первому входу устройства коррекции момента 6 и к входу вычислителя параметров скорости вращения 12. Выход устройства коррекции момента 6 присоединен к первому входу блока управления инвертором 5, выход которого соединен с входом блока драйверов 4. Выход блока драйверов 4 подключен ко второму входу инвертора 3.
Первый выход вычислителя параметров скорости вращения 12 соединен со вторым входом вычислителя мощности 8. Второй и третий выходы вычислителя параметров скорости вращения 12 соединены соответственно с первым и вторым входами вычислителя коэффициента пульсаций скорости 13, кроме того, третий выход вычислителя параметров скорости 12 подключен также к входу вычислителя угла электрического сканирования 14. Выход вычислителя коэффициента пульсаций скорости 13 подключен к третьему входу вычислителя мощности 8. Выход вычислителя угла электрического сканирования 14 подключен к первому входу переключателя режимов работы 15, второй вход которого подключен к выходу флэш-памяти 16, а третий вход - к выходу анемометра 19, второй выход переключателя режимов работы 15 подключен к входу диаграммо-образующей системы 18, ее выходы - к входам приемо-передающих модулей 17, выходы которых - к входам излучателей антенны. Первый выход переключателя режимов работы 15 подключен к четвертому входу вычислителя мощности 8.
Система управления электродвигателем антенны РЛС работает следующим образом.
Включают дизель, и начинается вращение ротора генератора (на фигуре не изображены), на выходе которого появляется трехфазное напряжение 380 В, 50 Гц, которое подают на входные клеммы 1 выпрямителя 2. Одновременно требуемые напряжения питания подаются на другие блоки и устройства системы управления (на фигуре не изображены).
С выхода выпрямителя 2 постоянное напряжение подают на первый вход инвертора 3.
С блока управления инвертором 5 сигналы подают на вход блока драйверов 4, которые формируют импульсы для управления транзисторами инвертора 3 и подают их на второй вход инвертора 3.
Трехфазное напряжение с выхода инвертора 3 подают через датчик тока 7 на вход электродвигателя 10. Начинается плавный разгон электродвигателя 10 и через редуктор - антенны.
Разгон электродвигателя 10 и, следовательно, антенны осуществляют до заданной величины угловой скорости антенны, которую определяют с помощью датчика скорости 11. Сигнал с выхода датчика скорости 11 поступает на третий вход блока управления инвертором 5, и далее через блок драйверов 4 и инвертор 3 осуществляет соответствующее воздействие на электродвигатель 10.
В процессе вращения антенны при возрастании момента на валу электродвигателя 10 происходит увеличение тока его статора. С первого выхода датчика тока 7 соответствующий сигнал поступает на второй вход блока управления инвертором 5, далее через блок драйверов 4 осуществляет соответствующее воздействие на инвертор 3, скорость вращения электродвигателя 10 уменьшается, что приводит к уменьшению момента на его валу и снижению величины тока статора. При снижении момента на валу электродвигателя 10 происходит уменьшение тока его статора. С первого выхода датчика тока 7 соответствующий сигнал поступает на второй вход блока управления инвертором 5, который через блок драйверов 4 осуществляет соответствующее воздействие на инвертор 3, скорость вращения электродвигателя 10 увеличивается, что приводит к увеличению момента на его валу и возрастанию величины тока статора.
При достижении требуемой величины скорости вращения антенны, происходит регулирование коэффициента пульсаций мощности и коэффициента пульсаций скорости вращения электродвигателя.
Сигнал с выхода датчика скорости 11 поступает на вход вычислителя параметров скорости вращения 12 вала электродвигателя 10, который вырабатывает выходные сигналы, один из которых пропорционален средней скорости вращения вала электродвигателя 10, а другой пропорционален амплитуде переменной составляющей этой скорости.
С первого выхода вычислителя параметров скорости вращения 12 сигнал скорости вращения вала электродвигателя 10 и сигнал, пропорциональный средней скорости вращения вала электродвигателя 10, подают на вторые входы вычислителя мощности 8 и вычислителя коэффициента пульсаций скорости 13, и на вход вычислителя угла электрического сканирования 14.
Со второго выхода вычислителя параметров скорости вращения 12 сигнал, пропорциональный амплитуде переменной составляющей скорости вращения вала электродвигателя 10, подают на первый вход вычислителя коэффициента пульсаций скорости 13.
С выхода вычислителя коэффициента пульсаций скорости 13 сигнал, пропорциональный коэффициенту пульсаций скорости вращения вала электродвигателя 10, поступает на третий вход вычислителя мощности 8.
С первого выхода датчика тока 7 подают сигнал на первый вход вычислителя мощности 8, где его преобразуют в сигнал, пропорциональный моменту на валу электродвигателя 10.
В вычислителе мощности 8 происходят следующие вычисления:
- исходя из величины сигнала момента на валу электродвигателя 10 и сигнала скорости вращения вала электродвигателя 10 определяют момент сопротивления на валу;
- исходя из величины сигнала момента сопротивления определяют его переменную составляющую и среднее значение;
- сигнал средней скорости вращения вала электродвигателя 10 и сигнал среднего значения его момента сопротивления на валу преобразуют в сигнал среднего значения мощности на валу электродвигателя 10;
- сигналы коэффициента пульсаций скорости вращения вала и переменной составляющей момента сопротивления на валу электродвигателя преобразуют в сигнал, соответствующий переменной составляющей его мощности;
- по сигналам среднего значения и переменной составляющей мощности на валу электродвигателя вычисляют сигнал мгновенной мощности на валу электродвигателя 10.
Сигнал мгновенной мощности с первого выхода вычислителя мощности 8 подают на второй вход устройства коррекции момента 6.
Со второго выхода вычислителя мощности 8 сигнал пропорциональный средней мощности на валу электродвигателя 10 подают на первый вход вычислителя коэффициента пульсаций мощности 9.
С третьего выхода вычислителя мощности 8 сигнал пропорциональный среднеквадратичной составляющей мощности на валу электродвигателя 10 подают на второй вход вычислителя коэффициента пульсаций мощности 9.
На первый вход устройства коррекции момента на валу электродвигателя 6 подают сигнал скорости вращения электродвигателя 10 с выхода датчика скорости 11. Устройство коррекции момента 6 вычисляет сигнал коррекции момента на валу электродвигателя 10, и подает его на первый вход блока управления инвертором 5. С блока управления инвертором 5 через блок драйверов 4 происходит управление транзисторами инвертора 3 и соответствующее изменение скорости вращения электродвигателя 10. В результате, коэффициент пульсаций мощности на валу электродвигателя 10 уменьшается. Переменная составляющая мощности на валу, практически, отсутствует.
При изменении скорости ветра, соответственно, изменяется момент на валу электродвигателя 10, ток статора, мощность на валу электродвигателя 10, коэффициент пульсаций мощности на валу электродвигателя 10.
Сигнал с выхода вычислителя коэффициента пульсаций мощности 9 подают на третий вход вычислителя коэффициента пульсаций скорости 13.
Происходит изменение сигнала коэффициента пульсаций скорости. С выхода вычислителя коэффициента пульсаций скорости 13 измененный сигнал подают на третий вход вычислителя мощности 8. Происходит изменение сигнала мгновенной мощности на валу электродвигателя 10, который подают с первого выхода вычислителя мощности 8 на второй вход устройства коррекции момента 6.
Далее сигнал проходит по цепи: устройство коррекции момента 6, блок управления инвертором 5, блок драйверов 4, транзисторы инвертора 3. Происходит изменение скорости вращения электродвигателя 10 и соответствующее изменение коэффициента пульсаций скорости, что вызывает соответствующее изменение коэффициента пульсаций мощности.
Обратная связь по коэффициенту пульсаций мощности на валу электродвигателя 10 и коэффициенту пульсаций скорости вращения электродвигателя 10 обеспечивает получение минимального коэффициента пульсаций мощности статора при соответствующем изменении коэффициента пульсаций скорости вращения вала электродвигателя 10.
При уменьшении ветровой нагрузки на антенну коэффициент пульсаций мощности на валу электродвигателя 10 уменьшается, также уменьшается коэффициент пульсаций скорости вращения электродвигателя 10.
При увеличении ветровой нагрузки на антенну коэффициент пульсаций мощности на валу электродвигателя 10 практически не изменяется, а коэффициент пульсаций скорости вращения электродвигателя 10 увеличивается.
Вместе с увеличением коэффициента пульсаций скорости вращения электродвигателя 10 увеличивается и коэффициент пульсаций скорости вращения ДНА. Ухудшается тактико-техническая характеристика РЛС - вероятность правильного обнаружения цели.
Указанное противоречие в РЛС с АФАР может быть устранено путем одновременной реализации механического и электрического сканирования, т.е. совмещенным сканированием ДНА.
Авторами предложена система управления РЭП антенны РЛС, реализующая в условиях ветровой нагрузки электромеханическое сканирование с постоянной скоростью вращения ДНА, что обеспечивает сохранение характеристик направленности в секторе сканирования и тем самым позволяет повысить тактико-техническую характеристику РЛС - вероятность правильного обнаружения цели.
Для этого величину коэффициента пульсаций скорости вращения вала электродвигателя и антенны δω* поддерживают на уровне, при котором коэффициент пульсаций мощности δР* ≈ 0, для чего в систему управления РЭП, ранее в прототипе было введено устройство коррекции момента 6 на валу электродвигателя. Устройство коррекции момента 6 формирует сигнал, воздействующий на инвертор РЭП, который пропорционален переменной составляющей момента С ДИМ и находится в противофазе с сигналом, пропорциональным переменной составляющей момента сопротивления на его валу.
Одновременно, в предложенной системе, вычислитель угла электрического сканирования 14, формирует сигнал, пропорциональный углу электрического сканирования, подаваемый на первый вход переключателя режимов работы 15, а переключатель режимов работы в свою очередь со второго выхода подает сигнал необходимого угла электрического сканирования на диаграммо-образующую систему 18, которая, через приемопередающие модули 17 и излучатели антенны, реализует электронное сканирование ДНА с переменной скоростью в противофазе с изменением скорости вращения АФАР.
При малой скорости ветра и, следовательно, небольшой ветровой нагрузке на антенну ЭП работает в режиме постоянной скорости вращения антенны.
При резком возрастании в неизвестный заранее момент времени нагрузки ЭП происходит переход РЭП из режима постоянной скорости вращения (ω~) в режим переменной скорости вращения (ω=). Вычислитель коэффициента пульсаций скорости 13 производит вычисление коэффициента пульсаций скорости δω*, при котором коэффициент δР* пульсаций мощности принимает значение δР* ≈ 0.
Коэффициенты пульсаций скорости вала δω* со и пульсаций мощности δР* в стационарном режиме работы рассчитываются, в общем случае, по формуле коэффициента пульсаций сложной периодической функции f(t)

где FRMS, FMEAN - соответственно, среднеквадратичное и среднее на периоде повторяемости, значения периодической функции f(t).
Максимальный допустимый угол Θmax электрического сканирования РЛС равен Θmax = 45°. Требуемый угол электрического сканирования ДНА в горизонтальной плоскости определяется по формуле

где γ=, γ~ - углы механического сканирования ДНА при постоянной и переменной скорости вращения антенны, соответственно.
Для обеспечения постоянной скорости сканирования ДНА сигнал, пропорциональный требуемому углу электрического сканирования ΘЭ, подается на диаграммо-образующую систему 18.
При этом величина ΘЭ не должна превышать значение Θmax электрического сканирования ДНА, обеспечиваемого РЛС.
В результате исследований установлено, что вычислитель мощности 8 отрабатывает возникшее изменение режима работы, примерно, за 2-3 оборота антенны, что связано с относительно длительным вычислением величины среднего значения момента сопротивления Мс=. При этом угол ΘЭ превышает максимально допустимое значение Θmax. В итоге, электрическое сканирование не обеспечивает требуемую ориентацию ДНА, и на протяжении 2-3-х оборотов антенны РЛС не в состоянии обеспечить обнаружение и сопровождение целей находящихся в зоне ее действия.
Данный недостаток устраняют за счет записи установившихся значений Мс= при различных скоростях V ветра во флэш-память 16. Также во флэш-память 16 вводят, заранее определенные величины коэффициента пульсаций скорости δω*, соответствующие различным скоростям ветра, при которых δР* ≈ 0.
Значения Мс= и δω* определяются по результатам моделирования.
При резком изменении скорости ветра, измеряемой анемометром 19, переключатель режимов работы 15 совместно с флэш-памятью 16 задает для вычислителя мощности 8, как необходимый коэффициент пульсаций
скорости δω*, так и необходимое начальное значение, Mc=, а для диаграммо-образующей системы 18 задает необходимый угол коррекции. Это позволяет в нестационарном режиме работы обеспечить значения угла ΘЭ не превышающие, практически, его величину в стационарном режиме. За счет этого РЛС осуществляет непрерывное обнаружение и сопровождение целей.
Таким образом, применение предлагаемой системы, обуславливает с введением новых элементов: вычислителя угла электрического сканирования, переключателя режимов работы, флэш-памяти, анемометра, приемо-передающих модулей, диаграммо-образующей системы ведет к расширению диапазона допустимого изменения скорости вращения антенны.
Что позволяет при большой ветровой нагрузке на антенну, т.е. высокой скорости ветра и скорости вращения антенны и ограниченном угле электрического сканирования ДНА улучшить технико-экономические показатели РЭП и ТТХ РЛС:
- уменьшить номинальную мощность электродвигателя и инвертора РЭП, а также генератора;
- обеспечить высокий КПД и коэффициент мощности электродвигателя;
- уменьшить стоимость, массу и габариты РЭП и генератора;
- повысить электромагнитную совместимость РЭП;
- повысить функциональную надежность;
- повысить скорость обзора,
- повысить вероятность правильного обнаружения цели.
Источники информации
1. Подвижная радиолокационная станция П-18, Военное издательство Министерства обороны СССР, М.: 1978. - 320 с.
2. Кириенко В.П., Стрелков В.Ф., Тетенькин Л.В. Система электропитания радиолокационного комплекса /Сборник докладов 1-ой Всероссийской конференции по средствам электропитания, Санкт - Петербург, 2007, С. 21-27.
3. Хватов С.В., Стрелков В.Ф., Тетенькин Л.В., Оптимизация режимов работы электроприводов вращения антенно - мачтовых устройств РЛС // Известия ТулГУ., Технические науки., Вып. 3: в 5 ч. Ч. 3, 2010, С. 186-190.
4. Радиотехнические системы. Под редакцией проф. Ю.М. Казаринова. - М., «Высшая школа», 1990, 496 с.
5. Патент РФ на изобретение №2554107 «Способ и система управления электродвигателем вращения антенны РЛС» Стрелков В.Ф., Ваняев В.В., Андрюхин М.В., Бобылев И.В., МПК H01Q 3/34, Н02Р 27/06, опубл. 27.06.2015, Бюл. №18.
6. Стрелков В.Ф., Андрюхин М В, Ваняев В.В. Электропривод вращения антенны РЛС с переменной скоростью. //Вестник Концерна ПВО «Алмаз-Антей». // №3, М., 2015. - С. 78-84.
7. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. М. «AKADEMA», 2006, 265 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2014 |
|
RU2554107C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2013 |
|
RU2541151C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2011 |
|
RU2450394C1 |
| Система управления приводами антенны станции наведения | 2022 |
|
RU2794200C1 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| ИСТОЧНИК ЭЛЕКТРОПИТАНИЯ АППАРАТУРЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2013 |
|
RU2534028C1 |
| Инвертор транспортного исполнения | 2022 |
|
RU2788306C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СТАНЦИЯ УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2012 |
|
RU2507418C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
Изобретение относится к управлению электродвигателями вращения антенн радиолокационных станций (РЛС) и может быть использовано в регулируемых электроприводах (РЭП). Техническим результатом является расширение диапазона допустимого изменения скорости вращения антенны. Указанный технический результат достигается за счет того, что в систему управления электродвигателем, содержащую входные клеммы выпрямителя и выпрямитель, инвертор, блок драйверов, блок управления инвертором, устройство коррекции момента, датчик тока, вычислитель мощности, вычислитель коэффициента пульсаций мощности, электродвигатель, датчик скорости, вычислитель параметров скорости вращения и вычислитель коэффициента пульсаций скорости с соответствующими связями, дополнительно введены вычислитель угла электрического сканирования, переключатель режимов работы, флэш-память, приемо-передающие модули, диаграммообразующая система и анемометр. 1 ил.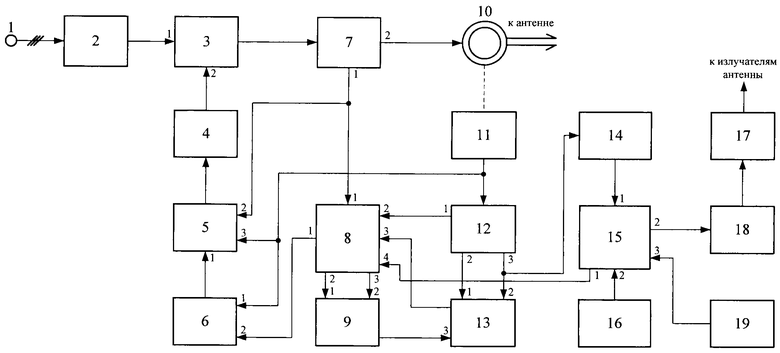
Система управления электродвигателем вращения антенны РЛС, включающая входные клеммы выпрямителя и выпрямитель, выход которого подключен к первому входу инвертора, при этом выход инвертора подключен к входу датчика тока, второй выход которого подключен к входу электродвигателя, первый выход датчика тока соединен со вторым входом блока управления инвертором, выход которого соединен с входом блока драйверов, выход которого подключен ко второму входу инвертора, на валу ротора электродвигателя установлен датчик скорости, выход которого подключен к третьему входу блока управления инвертором, устройство коррекции момента, вычислители: мощности на валу электродвигателя, коэффициента пульсаций мощности, параметров скорости вращения вала электродвигателя, коэффициента пульсаций скорости вращения вала электродвигателя, причем первый выход датчика тока подключен к первому входу вычислителя мощности, первый выход вычислителя мощности соединен со вторым входом устройства коррекции момента, а второй и третий выходы - с первым и вторым входами вычислителя коэффициента пульсаций мощности, выход которого соединен с третьим входом вычислителя коэффициента пульсаций скорости, выход датчика скорости подключен к первому входу устройства коррекции момента и к входу вычислителя параметров скорости вращения, первый выход которого подключен ко второму входу вычислителя мощности, а второй и третий выходы соответственно подключены к первому и второму входам вычислителя коэффициента пульсаций скорости, выход которого - к третьему входу вычислителя мощности, выход устройства коррекции момента подключен к первому входу блока управления инвертором, отличающаяся тем, что вновь введены вычислитель угла электрического сканирования, переключатель режимов работы, флэш-память, приемо-передающие модули, диаграммообразующая система, анемометр, причем, вход вычислителя угла электрического сканирования подключен к третьему выходу вычислителя параметров скорости вращения, выход вычислителя угла электрического сканирования подключен к первому входу переключателя режимов работы, второй вход которого подключен к выходу флэш-памяти, третий вход - к выходу анемометра, а первый выход - к четвертому входу вычислителя мощности, выход переключателя режимов работы подключен к входу диаграммообразующей системы, ее выходы - к входам приемо-передающих модулей, выходы которых - к входам излучателей антенны.
| СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2011 |
|
RU2450394C1 |
| Способ приготовления водной суспензии инсектофунгисидов | 1948 |
|
SU74217A1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2014 |
|
RU2554107C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ВРАЩЕНИЯ АНТЕННЫ РЛС | 2013 |
|
RU2541151C2 |
| WO 2003060536 A1, 24.07.2003 | |||
| Способ восстановления азотированных коленчатых валов | 1988 |
|
SU1638200A1 |

