Изобретение относится к области машиностроения, в частности к способам и устройствам для преобразования возвратно-линейного движения ведущего звена кинематической цепи механизма в однонаправленное вращение ведомого звена указанного механизма.
Известны различные типы механизмов (их конструкций и соответствующих кинематических схем), например использующих мускульную силу человека для привода устройств различного назначения (типа насосов, велосипедов, тренажеров, электрогенераторов и т.д.).
Каждому из этих типов конструкций присущи недостатки, в частности механизмы, ведущее звено кинематической цепи которых приводится в движение возвратно-поступательно (линейно), имеют ограничение хода ведущего звена в зависимости от диаметра исполнительного звена.
Из уровня техники известно устройство, раскрытое в публикации патента US 5322312, (кл. B62M 1/12, опубл.21.06.1994 г.), которое содержит ведущее звено (16), включающее рабочие звездочки (54, 56), обгонные муфты, цепи (66, 68) и исполнительное звено (42, 44). Однако возвратно-вращательное движение преобразуется в одностороннее вращение исполнительного звена, что не отличается от работы велосипедного привода.
Наиболее близким аналогом заявляемого способа можно признать способ преобразования с помощью реечного зубчатого механизма (Теория механизмов и машин. И.И.Артоболевский. 4-е изд., 1988), однако недостатком ближайшего аналога являются меньшие функциональные возможности кинематической цепи механизма, т.е. с помощью рассматриваемого здесь такого механизма движение передается, но не преобразуется и не суммируется.
Задачей заявляемого решения является исключение конструктивной зависимости хода ведущего звена от диаметра исполнительного звена механизма.
А также увеличение вариантов использования преобразователя в механизмах.
Поставленная задача решается путем преобразования возвратно-линейного движения ведущего звена в одностороннее вращательное движение исполнительного звена, причем движение с ведущего звена передается через, по меньшей мере, одно промежуточное звено и, по меньшей мере, одну обгонную муфту посредством цепной передачи на исполнительное звено.
А также тем, что движение с ведущего звена передается через два промежуточных звена и две встречно ориентированные обгонные муфты посредством цепной передачи на исполнительное звено без потерь времени на холостой ход.
А также тем, что используют одновременно два ведущих звена.
Заявляемое техническое решение может быть рассмотрено на представленных чертежах, которые носят только поясняющий характер и не ограничивают варианты выполнения заявляемого решения.
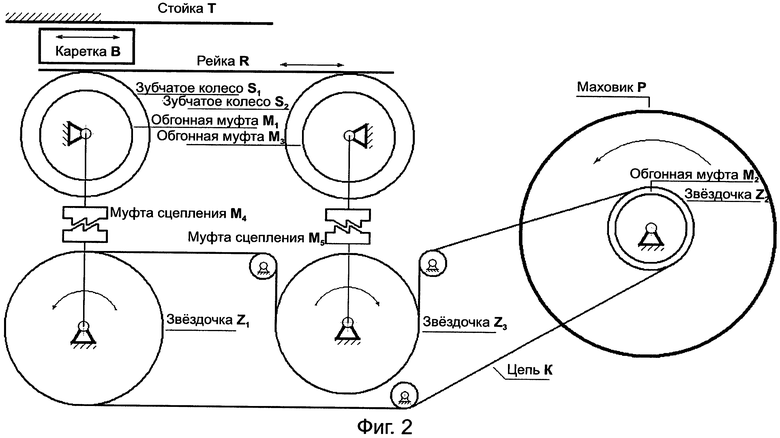
На фиг.1 ведущее звено кинематической цепи - зубчатая рейка (R) - приводится в движение относительно каретки (В), при этом сама каретка (В), которую можно рассматривать как второе ведущее звено, приводится в движение относительно, например, рамы транспортного средства (стойки Т, на которой крепятся упоры для рук кинематической цепи). С ведущего звена механизма (рейки R) движение передается цепной передачей (К) на исполнительное звено кинематической цепи, на маховик (Р), т.е. исполнительное звено, в качестве которого может быть движущее колесо транспортного средства. Возвратно-линейное движение ведущего звена (R) передается на зубчатое колесо (S), являющееся промежуточным звеном механизма преобразователя и движущееся возвратно-вращательно, а также связанное через обгонную муфту (М1) со звездочкой (Z1), которая является ведущей для цепи (К). Далее движение с ведомой звездочки (Z2), связанной через обгонную муфту (М2), передается на маховик (Р), т.е. исполнительное звено механизма. Таким образом, исключается зависимость хода ведущего звена механизма от величины диаметра исполнительного звена механизма (маховика Р).
Расширение технологических возможностей всего механизма, т.е. увеличение вариантов использования преобразователя, происходит в случае, когда суммируются на исполнительном звене (Р) движения каретки рейки (R) как первого ведущего звена и движения каретки (В) как второго ведущего звена. При таком использовании, в частности, значительно увеличивается скорость исполнительного звена.
На фиг.2 представлен еще один вариант выполнения заявленного решения, где дополнительно решается задача исключения потерь времени на холостой ход механизма, которая обеспечивается передачей возвратно-линейного движения рейки (R) на цепь (К) посредством двух звездочек (Z1, Z3), входящих в зацепление с цепью (К) на противоположных сторонах ее контура и связаны с шестернями (S1 и S2 соответственно) через обгонные муфты (М1, М3) соответственно, ориентированные встречно (разнонаправленно), что обеспечивает возможность преобразовать возвратно-линейное движение рейки (R) во вращательное движение маховика (Р) без потерь времени на холостой ход. При этом для обеспечения возможности холостого хода предусмотрены муфты сцепления (М4, М5) между обгонными муфтами (М1, М3) и звездочками (Z1, Z3 соответственно).
Настоящее изобретение относится к области машиностроения, в частности к способу для преобразования возвратно-поступательного движения во вращательное. Согласно способу возвратно-поступательное движение ведущего звена передается через промежуточное звено и обгонную муфту посредством цепной передачи на исполнительное звено. Устройство преобразования движения может содержать два промежуточных звена, две встречно ориентированные обгонные муфты и два ведущих звена. Решение направлено на увеличение скорости перемещения устройства, упрощение устройства преобразования движения. 2 з.п. ф-лы, 2 ил.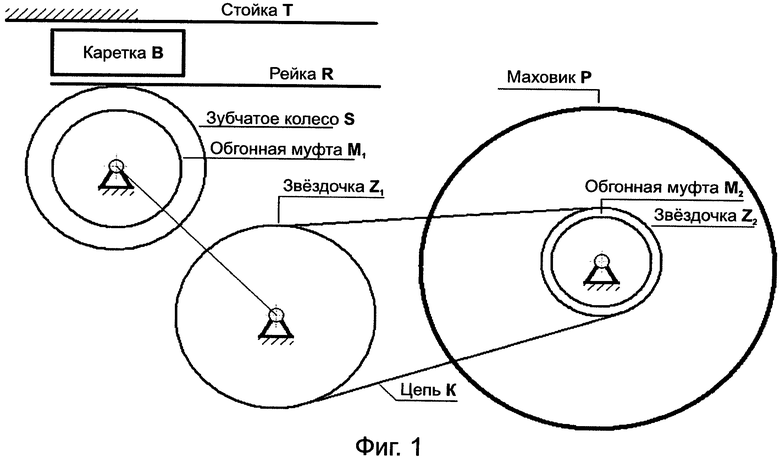
1. Способ преобразования возвратно-линейного движения ведущего звена в одностороннее вращательное движение исполнительного звена, отличающийся тем, что движение с ведущего звена передается через, по меньшей мере, одно промежуточное звено и, по меньшей мере, одну обгонную муфту посредством цепной передачи на исполнительное звено.
2. Способ по п.1, отличающийся тем, что движение с ведущего звена передается через два промежуточных элемента и две встречно ориентированные обгонные муфты посредством цепной передачи на исполнительное звено без потерь времени на холостой ход.
3. Способ по п.1, отличающийся тем, что используют одновременно два ведущих звена.
| US 5322312 A, 21.06.1994 | |||
| US 4925200 A, 15.05.1990 | |||
| US 4453729 A, 12.06.1984 | |||
| US 5683321 A, 04.11.1997 | |||
| Транспортное средство, приводимое в действие мускульной силой человека | 1990 |
|
SU1752642A1 |

