Изобретение относится к общему машиностроению и может быть использовано в устройствах для преобразования возвратно-поступательного движения во вращательное.
Известен механизм для преобразования возвратно-поступательного движения в непрерывное вращательное по авторскому свидетельству СССР №1288406, кл. F16H 19/04, 1985 г., содержащий корпус с направляющими, ведомый вал, установленный в корпусе, зубчатые колеса, муфты свободного хода, наружные обоймы которых жестко связаны с зубчатыми колесами, а внутренние обоймы - с ведомым валом, зубчатую рейку, перемещающуюся в направляющих и взаимодействующую с зубчатыми колесами, привод рейки, дополнительный вал, установленный в корпусе параллельно основному, одно из зубчатых колес размещено на дополнительном валу, рейка выполнена двухсторонней, а валы кинематически связаны друг с другом.
Недостатком указанного механизма является большой габаритный размер в направлении хода рейки, который примерно равен двум длинновым размерам последней.
Известен механизм преобразования возвратно-поступательного движения в непрерывное вращательное по авторскому свидетельству СССР №1770645, кл. F16H 9/04, 19/02, 1992 г., принятый заявителем за прототип. Он содержит корпус с направляющими, установленные в корпусе ведомый и дополнительный валы, ведомые звездочки, жестко установленные на ведомом и дополнительном валах, охватывающую ведомые звездочки бесконечную цепь, приводной элемент, установленный в направляющих с возможностью возвратно-поступательного движения, два ведущих элемента, связанные с приводным элементом, две муфты свободного хода, наружные обоймы которых жестко связаны с ведущими элементами, приводной элемент выполнен в виде каретки, внутренние обоймы муфт свободного хода жестко установлены на каретке, ведущие элементы выполнены в виде звездочек и охвачены соответствующей ветвью бесконечной цепи.
Также в авторском свидетельстве СССР №1770645, кл. F16H 9/04, 19/02, 1992 г., описан процесс преобразования возвратно-поступательного движения в непрерывное вращательное, также принятый заявителем за прототип, по которому ведущее звено, которое снабжают обгонными муфтами, совершает возвратно-поступательное движение, а ведомые элементы совершают вращательные движения в одну сторону вместе и за счет гибкой связи, и вместе с ними ведомый вал совершает непрерывное вращение.
Однако механизм, осуществляющий процесс преобразования возвратно-поступательного движения в непрерывное вращательное, представляет собой жесткую конструкцию, в которой ведущее звено выполнено в виде каретки, совершающей возвратно-поступательное движение в направляющих корпуса. Наличие направляющих и каретки определяет однозначное пространственное размещение данного механизма и явно ведет к потерям энергии при работе механизма. Кроме того, установленные в каретке отклоняющие звездочки, предназначенные для увеличения угла обхвата дополнительных звездочек, также ведут к потерям. Однако, как и «съем» вращательного движения с ведомого вала, который одновременно необходимо и вращать, и передавать с него вращение, - резко снижает передающее вращение. Процесс преобразования одного движения в другое из-за указанных потерь становится малоэффективным.
Технической задачей изобретения является создание процесса преобразования возвратно-поступательного движения в непрерывное вращательное, более эффективного с наименьшими потерями за счет создания более простого и надежного, мобильного устройства, осуществляющего этот процесс.
Поставленная задача решается тем, что в предлагаемом решении гибкую связь выполняют в виде ведущего звена, обгонные муфты снабжают барабанами, а ведомые элементы выполняют в виде ведомых шкивов, причем гибкую связь выполняют в виде троса, охватывают им ведомые шкивы и наматывают его на барабаны обгонных муфт, размещают обгонные муфты с барабанами на одном валу, который выполняют передающим вращательного движения от обгонных муфт внешним механизмам, и посредством гибкой связи совершают возвратно-поступательное движение, для чего прикладывают усилие возвратно-поступательного характера к точке, которую выбирают на любом прямолинейном участке гибкой связи, а ведомые шкивы совершают возвратные поворотно-колебательные движения, при этом передающий вал совершает непрерывное вращательное движение в одну сторону.
Кроме того, ось передающего вала размещают перпендикулярно осям вращения ведомых шкивов.
Кроме того, ведущее звено механизма преобразования возвратно-поступательного движения в непрерывное вращательное выполнено в виде гибкой связи с возможностью приложения усилия возвратно-поступательного характера к точке, выбранной на любом прямолинейном участке гибкой связи, а гибкая связь выполнена в виде троса, ведомые элементы выполнены в виде шкивов, причем на ведомом валу установлен ведомый шкив, а на дополнительном ведомом валу установлен дополнительный ведомый шкив, обгонные муфты снабжены барабанами, причем гибкая связь охватывает ведомый и дополнительный ведомый шкивы и намотана на барабаны обгонных муфт, а обгонные муфты размещены на одном валу, который выполнен передающим и предназначен для передачи сообщенного ему вращательного движения от обгонных муфт внешним механизмам.
Кроме того, передающий вал, на котором размещены обгонные муфты с барабанами, размещен перпендикулярно ведомому валу и дополнительному ведомому валу и снабжен маховиком.
Кроме того, дополнительный ведомый вал установлен с возможностью регулировки натяжения гибкой связи.
Технический результат от использования предлагаемого технического решения заключается в том, что получен эффективный с минимальными потерями механизм благодаря использованию в качестве ведущего звена гибкой связи, механизм преобразования возвратно-поступательного движения в непрерывное вращательное получился «гибкий», то есть использование гибкой связи в качестве ведущего звена определило множество решений пространственного размещения данного механизма.
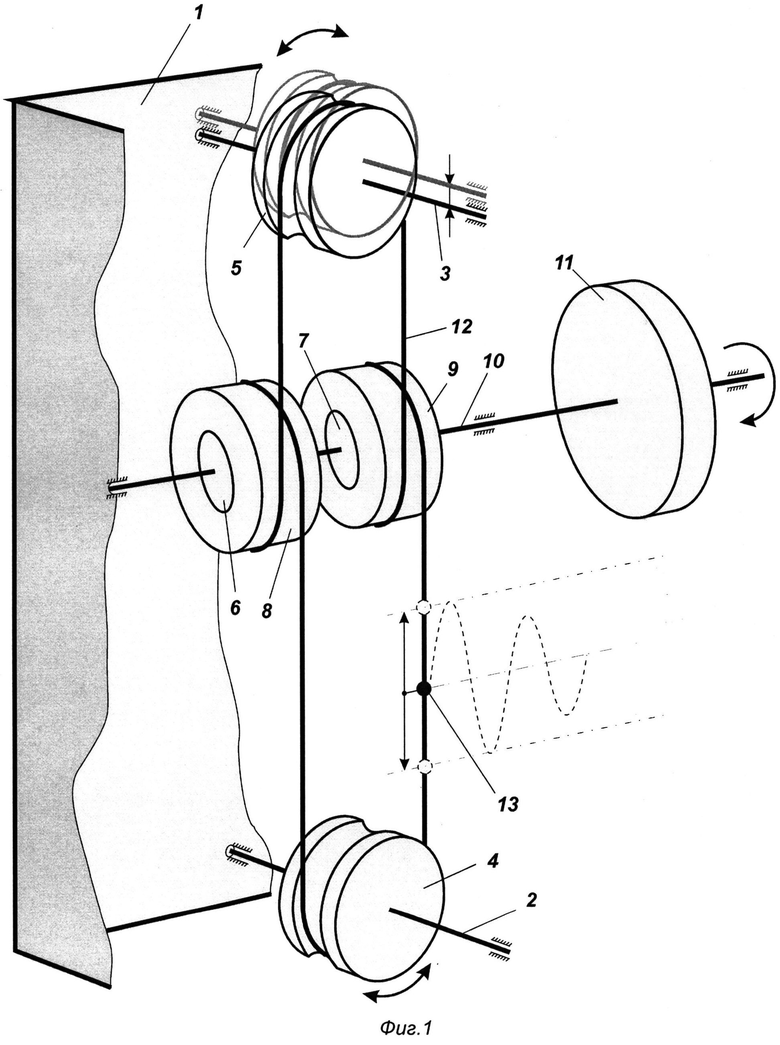
На фиг.1 изображена схема механизма преобразования возвратно-поступательного движения в непрерывное вращательное;
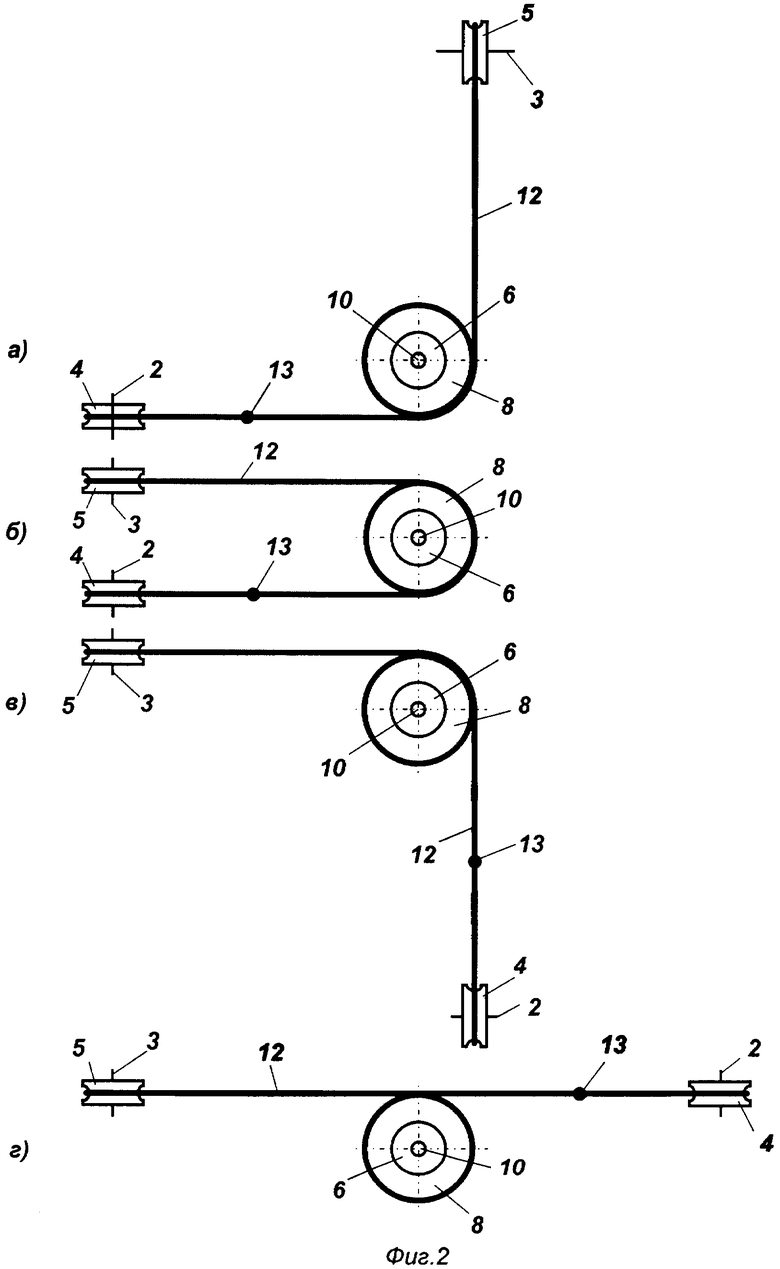
на фиг.2 - варианты решений пространственного размещения всего механизма.
Механизм преобразования возвратно-поступательного движения в непрерывное вращательное содержит корпус 1, на котором в нижней его части жестко установлен ведомый вал 2, а в верхней его части установлен дополнительный ведомый вал 3. На ведомом валу 2 установлен ведомый элемент, выполненный в виде ведомого шкива 4, а на дополнительном ведомом валу 3 установлен дополнительный ведомый шкив 5. Причем оси ведомого вала 2 и дополнительного ведомого вала 3 параллельны друг другу.
В корпусе 1 установлены обгонные муфты 6 и 7, которые снабжены барабанами 8 и 9 и размещены на одном валу 10, который выполнен передающим и предназначен для передачи сообщенного ему вращательного движения от обгонных муфт 6 и 7 внешним потребителям.
Передающий вал 10 размещен в корпусе 1 перпендикулярно ведомому валу 2 и дополнительному ведомому валу 3. На одном конце вала 10 установлен маховик 11, который предназначен для создания инерции при передаче непрерывного вращения внешним потребителям.
Ведущее звено механизма выполнено в виде гибкой связи 12 с возможностью приложения усилия возвратно-поступательного характера к точке 13, выбранной на любом прямолинейном участке гибкой связи 12. Гибкая связь 12 выполнена в виде троса.
Гибкая связь 12 охватывает ведомый шкив 4 и дополнительный шкив 5 и намотана на барабаны 8 и 9 соответственно обгонных муфт 6 и 7. Причем дополнительный ведомы вал установлен в корпусе 1 с возможностью регулировки натяжения гибкой связи 12.
Благодаря использованию гибкой связи в качестве ведущего звена появилось множество решений пространственного размещения всего механизма (фиг.2).
Способ преобразования возвратно-поступательного движения в непрерывное вращательное осуществляют следующим образом.
Гибкую связь 12 выполняют в виде ведущего звена, обгонные муфты 6 и 7 снабжают барабанами 8 и 9, а ведомые элементы выполняют в виде ведомых шкивов. Причем на ведомый вал 2 устанавливают ведомый шкив 4, а на дополнительный ведомый вал 3 устанавливают дополнительный ведомый шкив 5. Гибкую связь 12 выполняют в виде троса.
Тросом - гибкой связью 12 - охватывают ведомый шкив 4 и дополнительный ведомый шкив 5 и наматывают трос на барабаны 8 и 9 обгонных муфт 6 и 7. При этом размещают обгонные муфты 6 и 7 с барабанами 8 и 9 на одном валу 10, который выполняют передающим вращательные движения от обгонных муфт 6 и 7 внешним потребителям. И посредством гибкой связи 12, поскольку она является ведущим звеном, совершают возвратно-поступательное движение, для чего прикладывают усилие возвратно-поступательного характера к точке 13, которую выбирают на любом прямолинейном участке гибкой связи 12, а ведомые элементы - шкивы 4 и 5 - совершают при этом возвратные поворотно-колебательные движения, благодаря чему передающий вал 10 совершает непрерывное вращательное движение в одну сторону. Этому также способствует, установленный на передающем валу 10 маховик 11.
Шкивы 4 и 5 совершают не вращательное движение, а возвратные поворотно-колебательные движения, причем на угол, зависящий от амплитуды колебания гибкой связи 12 и от диаметров ведомых шкивов 4 и 5 в разной степени и независимо друг от друга.
Например, точку 13 приложения усилия возвратно-поступательного характера выбирают на прямолинейном участке гибкой связи 12, находящемся ниже передающего вала 10.
При перемещении точки 13 вниз гибкая связь 12 перемещается также вниз, поворачивает ведомый шкив 4 и беспрепятственно обегает барабан 8 обгонной муфты 6 и дополнительный ведомый шкив 5, с которого гибкая связь 12 ниспадает на барабан 9 обгонной муфты 7 и под натягом поворачивает ее, а вместе с ней и передающий вал 10.
При перемещении точки 13 вверх гибкая связь 12 перемещается также вверх, беспрепятственно обегает барабан 9 обгонной муфты 7, поворачивает дополнительный ведомый шкив 5, с которого гибкая связь 12 переходит на барабан 8 обгонной муфты 6 и под натягом поворачивает ее, а вместе с ней и передающий вал 10, вращая его в ту же сторону, что и при приложении усилия к точке 13 вниз. При этом установленный на передающем валу 10 маховик 11 поддерживает это вращение.
Чем больше амплитуда колебаний, тем реже переключение обгонных муфт и стабильнее передача крутящего момента. Чем больше диаметр ведомых шкивов, тем больше передаваемый крутящий момент.
Независимо от выбранного прямолинейного участка для приложения усилия в точке 13 механизм будет работать одинаково эффективно и надежно.
Использование предлагаемого технического решения позволило создать более эффективный, с наименьшими потерями процесс преобразования возвратно-поступательного движения в непрерывное вращательное за счет создания простого и надежного, мобильного и трансформируемого механизма, осуществляющего этот процесс.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм преобразования возвратно-поступательного движения в непрерывное вращательное | 2016 |
|
RU2629584C2 |
| Водоветровой двигатель | 2017 |
|
RU2688623C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2451803C1 |
| Возвратно-поступательный ножной привод для велосипеда | 2022 |
|
RU2780873C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2522729C1 |
| Устройство для преобразования однонаправленного прерывистого движения во вращательное | 2017 |
|
RU2652763C2 |
| ПРИВОД ПЕДАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2525185C2 |
| МЕХАНИЧЕСКИЙ ВАКУУМНЫЙ ВВОД | 2002 |
|
RU2231704C2 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С МУСКУЛЬНЫМ ДВИГАТЕЛЕМ | 1992 |
|
RU2033367C1 |
Изобретение относится к общему машиностроению и может быть использовано в механизмах для преобразования возвратно-поступательного движения во вращательное. Механизм преобразования движения содержит корпус, ведущее звено, ведомый и дополнительный ведомый валы с размещенными на них ведомыми элементами, а также передающий вал, на котором размещены обгонные муфты. Ведущее звено выполнено в виде гибкой связи, а именно в виде троса. Ведомые элементы выполнены в виде шкивов. Гибкая связь охватывает шкивы и намотана на барабаны обгонных муфт. Ведомые шкивы совершают возвратные поворотно-колебательные движения, при этом передающий вал совершает непрерывное вращательное движение в одну сторону. Технический результат - упрощение конструкции и повышение надежности механизма. 2 н. и 2 з.п. ф-лы, 2 ил.
1. Способ преобразования возвратно-поступательного движения в непрерывное вращательное движение передающего вала, по которому ведущее звено совершает возвратно-поступательное движение, а передающий вал совершает непрерывное вращательное движение в одну сторону за счет гибкой связи, отличающийся тем, что гибкую связь выполняют в виде ведущего звена, обгонные муфты снабжают барабанами, а ведомые элементы выполняют в виде ведомых шкивов, причем гибкую связь выполняют в виде троса, охватывают им ведомые шкивы и наматывают его на барабаны обгонных муфт, размещают обгонные муфты с барабанами на одном валу, который выполняют передающим вращательные движения от обгонных муфт внешним механизмам, и посредством гибкой связи совершают возвратно-поступательное движение, для чего прикладывают усилие возвратно-поступательного характера к точке, которую выбирают на любом прямолинейном участке гибкой связи, а ведомые шкивы совершают возвратные поворотно-колебательные движения, при этом передающий вал совершает непрерывное вращательное движение в одну сторону.
2. Способ по п.1, отличающийся тем, что ось передающего вала размещают перпендикулярно осям вращения ведомых шкивов.
3. Механизм преобразования возвратно-поступательного движения в непрерывное вращательное, содержащий корпус, ведущее звено, ведомый и дополнительный ведомый валы с размещенными на них ведомыми элементами, отличающийся тем, что ведущее звено выполнено в виде гибкой связи с возможностью приложения усилия возвратно-поступательного характера к точке, выбранной на любом прямолинейном участке гибкой связи, а гибкая связь выполнена в виде троса, ведомые элементы выполнены в виде шкивов, причем на ведомом валу установлен ведомый шкив, а на дополнительном ведомом валу установлен дополнительный ведомый шкив, обгонные муфты снабжены барабанами, причем гибкая связь охватывает ведомый и дополнительный ведомый шкивы и намотана на барабаны обгонных муфт, а обгонные муфты размещены на одном валу, который выполнен передающим и предназначен для передачи сообщенного ему вращательного движения от обгонных муфт внешним механизмам.
4. Механизм по п.3, отличающийся тем, что передающий вал, на котором размещены обгонные муфты с барабанами, размещен перпендикулярно ведомому валу и дополнительному ведомому валу и снабжен маховиком.
| Способ извлечения алюминия из отходов | 1980 |
|
SU929725A1 |
| ПРЕОБРАЗОВАТЕЛЬ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ В ДВУПОЛУПЕРИОДНОЕ ВРАЩАТЕЛЬНОЕ | 2002 |
|
RU2267041C2 |
| US 5665018 A, 09.09.1997 | |||
| JP 5033838 A, 09.02.1993. | |||

