Способ относится к электротехнике и может быть использован в доменном производстве черной металлургии и других отраслях промышленности в установках перемещения материалов на заданные расстояния.
Известен способ управления электроприводом машины отбора проб газа доменной печи, посредством релейно-контакторного управления осуществляющего прямые пуски электродвигателя; а слежение за перемещением зонда осуществляется посредством сельсинного датчика положения.
Недостатком этого технического решения является наличие силовых ударов в приводных цепях каретки, перемещающих зонд при прямых пусках электродвигателя, и сложность схемотехнической реализации слежения за перемещением исследовательской трубы посредством многооборотного сельсинного датчика положения.
Целью предлагаемого способа является повышение надежности и улучшение качества управления, исключающее силовые удары за счет плавного разгона и торможения механизма машины отбора проб газов.
Поставленная цель достигается за счет применения частотно-регулируемого электропривода с управлением от логического контроллера и импульсного энкодера, следящего за перемещением исследовательской трубы.
На рис.1 приведена функциональная схема автоматизированного электропривода машины отбора проб газов, реализующая предлагаемый способ.
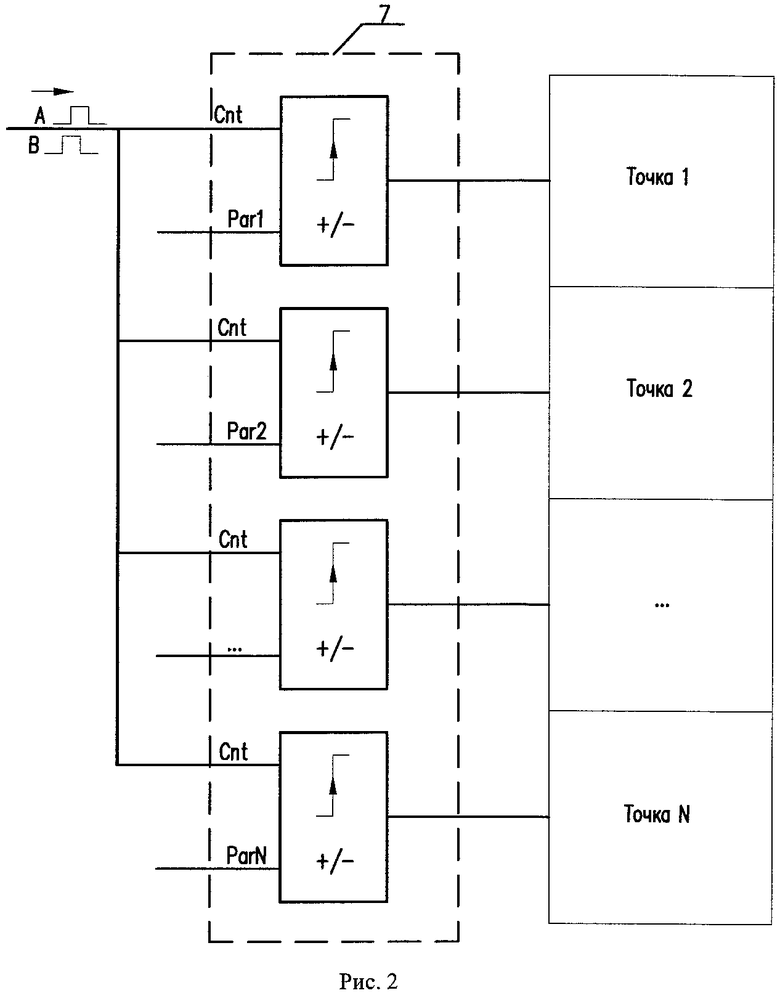
Для управления применен частотно-регулируемый электропривод 1, управляемый логическим контроллером 2, на вход которого при перемещении исследовательской трубы 3 поступают импульсы энкодера 4, фиксирующие перемещение трубы, при этом в логическом контроллере 2 программно организованы N счетчиков импульсов энкодера, приведенных на рисунке 2, содержащих уставки срабатывания Par1, Par2…ParN, соответствующие точкам отбора газа, при этом электропривод 1 останавливается, в точках отбора газа 5 по командам, поступающим от логического контроллера 2 при равенствах поступивших в счетчиках значений импульсов уставкам срабатывания, а последовательность движения от точки к следующей производится по сигналу управляющего устройства «Отбор закончен» (на схеме не показано).
Схема работает следующим образом.
По команде «Пуск» от управляющего устройства (на схеме не показано) логический контроллер 2 подает команду на управляющий вход преобразователя частоты 1 на вращение электродвигателю 6 с заранее заданной преобразователю частоты скоростью. Зонд 5 из исходного положения тчк 1 начинает перемещаться, при этом энкодер 4 подает импульсы на вход логического контроллера, где организованы N счетчиков импульсов, рис.2, энкодера, содержащих уставки срабатывания Par1, Par2…ParN, соответствующие расстояниям точек 1, 2…N отбора газа по радиусу печи 7, при равенстве количества подсчитанных импульсов уставке срабатывания счетчика логический контроллер 2 выдает сигнал управления частотному преобразователю 1 на останов приводного двигателя 6 для отбора пробы газа в исследовательской трубе 5 (устройство отбора газа на чертеже не показано), управляющее устройство после отбора газа выдает логическому контроллеру 2 сигнал «Отбор закончен», логический контроллер 2 выдает сигнал управления преобразователю частоты 1 на следующее перемещение исследовательской трубы 5, которое отрабатывается аналогично вышеописанному.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ВРАЩАЮЩЕГОСЯ РАСПРЕДЕЛИТЕЛЯ ШИХТОВЫХ МАТЕРИАЛОВ ДОМЕННОЙ ПЕЧИ | 2010 |
|
RU2439164C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ КОЛОШНИКОВОГО ГАЗА ДОМЕННОЙ ПЕЧИ | 1997 |
|
RU2106411C1 |
| Способ и комплекс автоматического регулирования параметров перемещения скипового подъема доменной печи | 2020 |
|
RU2751364C1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДОМЕННОЙ ПЛАВКОЙ | 2001 |
|
RU2199590C1 |
| Трехфазная автономная сеть с защитой | 1990 |
|
SU1742936A2 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ РАСПРЕДЕЛИТЕЛЯ ШИХТЫ ДОМЕННОЙ ПЕЧИ | 1998 |
|
RU2126056C1 |
| Система навозоудаления для беспривязного содержания животных и способ управления процессом навозоудаления в животноводческом помещении | 2022 |
|
RU2797384C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2011 |
|
RU2460268C1 |
| Устройство управления механизмом перемещения тарелки уравнительного клапана доменной печи | 1988 |
|
SU1569339A1 |
Изобретение относится к электротехнике и может быть использовано в доменном производстве черной металлургии. Технический результат заключается в повышении надежности и улучшении качества управления электроприводом машины отбора проб газа доменной мечи. Он достигается тем, что предложен способ автоматического управления электроприводом машины отбора проб газа доменной печи, содержащий электропривод, осуществляющий перемещение исследовательской трубы по заданным точкам отбора проб газа в доменной печи, при этом для управления применен частотно-регулируемый электропривод, управляемый логическим контроллером, на вход которого при перемещении исследовательской трубы поступают импульсы энкодера, фиксирующие перемещение трубы, при этом в логическом контроллере программно организованы N счетчиков импульсов энкодера, содержащих уставки срабатывания, соответствующие точкам отбора газа, при этом электропривод останавливается, в точках отбора газа по командам, поступающим от логического контроллера при равенствах поступивших в счетчиках значений импульсов уставкам срабатывания, а последовательность движения от точки к следующей производится по сигналу управляющего устройства «Отбор закончен». 2 ил.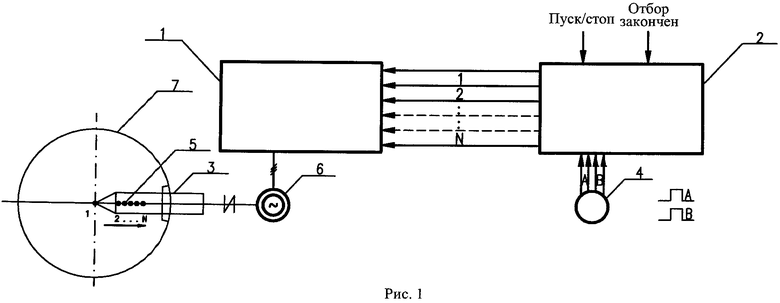
Способ автоматического управления электроприводом машины отбора проб газа доменной печи, содержащий электропривод, осуществляющий перемещение исследовательской трубы по заданным точкам отбора проб газа в доменной печи, отличающийся тем, что для управления применен частотно-регулируемый электропривод, управляемый логическим контроллером, на вход которого при перемещении исследовательской трубы поступают импульсы энкодера, фиксирующие перемещение трубы, при этом в логическом контроллере программно организованы N счетчиков импульсов энкодера, содержащих уставки срабатывания, соответствующие точкам отбора газа, при этом электропривод останавливается в точках отбора газа по командам, поступающим от логического контроллера при равенствах поступивших в счетчиках значений импульсов уставкам срабатывания, а последовательность движения от точки к следующей производится по сигналу управляющего устройства «Отбор закончен».

