Изобретение относится к области точной механики, а точнее к устройствам прецизионного перемещения, использующим смазку сжатым газом с компенсацией аэростатических сил за счет магнитного притяжения.
Известны плоские аэростатические направляющие устройства, подвижная часть которых (каретка) имеет, по крайней мере, два противолежащих зазора с направляющей, в которые через дроссели подается сжатый газ (воздух), так, что разнонаправленные силы отжима за счет давления в зазорах попарно уравновешивают друг друга, см., например, опубликованная заявка Германии DE 102008017413 (A1), 08.10.2009.
Однако такое решение приводит к завышению габарита устройства в направлении действия сил, а также при использовании высоких давлений и малых зазоров приводит к деформации деталей, поддерживающих противолежащие зазоры, и к искажению формы зазоров, что может вызвать аэродинамические неустойчивости, снижает несущую способность и жесткость направляющей.
От этих недостатков свободны известные бесконтактные плоские линейные направляющие со смазкой сжатым газом, подаваемым через дроссели в плоский зазор между направляющей и кареткой, причем каретка снабжена системой постоянных магнитов с полюсами, обращенными в зазор между кареткой и направляющей, а противолежащие с этими полюсами части направляющей выполнены из магнитно-мягкого материала. Aerotech, http://www.directindustry.com/prod/aerotech/air-bearing-linear-positioning-stages-9101-435900.html, 2008 (прототип).
Однако такие направляющие излишне сложны конструктивно и трудны в изготовлении. Действительно, для подавляющего большинства практических приложений направляющая должна удерживать две координаты, ортогональные направлению движения. В прототипе это осуществляется за счет того, что для каждой из указанных двух координат выполнятся отдельная плоская направляющая, имеющая дроссели и свою магнитную систему.
Технической задачей, решаемой данным изобретением, является создание эффективного устройства прецизионного перемещения и расширение арсенала устройств прецизионного перемещения.
Технический результат, обеспечивающий решение поставленной задачи, состоит в повышении эффективности за счет повышения точности позиционирования при упрощении, снижении материалоемкости и упрощении устройства.
Технический результат в предлагаемом изобретении достигается тем, что в аэромагнитном направляющем устройстве, содержащем направляющую и каретку, размещенные с зазорами относительно друг друга, дроссели, размещенные в каретке и открывающиеся в указанные зазоры и систему постоянных магнитов с полюсами и противолежащими им вставкам в направляющую из магнитно-мягкого материала, направляющая содержит две плоскости, расположенные параллельно линии движения, вершина угла между указанными плоскостями срезана под прямым углом к биссектрисе этого угла, на плоскости среза вдоль направления движения размещены вставки из магнитно-мягкого материала, а магнитная система каретки имеет полюсные наконечники, обращенные через зазор к указанным вставкам.
При этом наиболее употребительным является бесконтактное аэромагнитное направляющее устройство, в котором угол между двумя плоскостями направляющей равен прямому углу.
По второму варианту в аэромагнитном направляющем устройстве, содержащем направляющую и каретку, размещенные с зазорами относительно друг друга, дроссели, размещенные в каретке и открывающиеся в указанные зазоры и систему постоянных магнитов с полюсами и противолежащими им вставкам в направляющую из магнитно-мягкого материала, направляющая содержит две плоскости, расположенные параллельно линии движения, вершина угла между указанными плоскостями срезана под прямым углом к биссектрисе этого угла, на плоскости среза вдоль направления движения размещены вставки из магнитно-мягкого материала, а магнитная система каретки имеет полюсные наконечники, обращенные через зазор к указанным вставкам, при этом дроссели размещены в два ряда вдоль линии движения симметрично относительно серединной линии плоскостей каретки.
Причем и в данном варианте наиболее употребительным является бесконтактное аэромагнитное направляющее устройство, в котором угол между двумя плоскостями направляющей равен прямому углу.
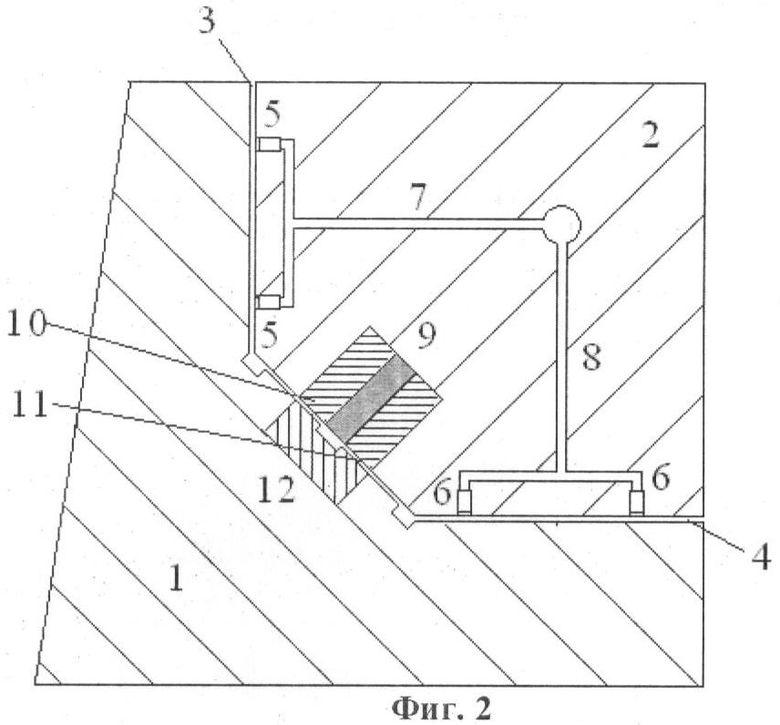
На Фиг.1 представлено сечение аэромагнитного направляющего устройства по первому варианту.
На Фиг.2 представлено сечение аэромагнитного направляющего устройства по второму варианту.
Бесконтактное аэромагнитное линейное направляющее устройство по первому варианту содержит угловую направляющую 1 и каретку 2, которые размещены с зазорами 3 и 4 относительно друг друга. В каретке выполнены дроссели 5 и 6, которые могут представлять собой калиброванные отверстия, щели или пористые проницаемые вставки, к которым по каналам 7 и 8 подается сжатый газ от внешнего источника. Внутренняя часть двугранного угла, образуемого зазорами, срезана под углом 45°, и в каретке 2 размещен постоянный магнит 9 с полюсными наконечниками из магнитно-мягкого материала 10 и 11. В направляющей 1 напротив полюсных наконечников 10 и 11 размещена вставка из магнитно-мягкого материала 12. В рассматриваемом примере направляющие плоскости образуют прямой угол, однако это не является обязательным условием. Срез двугранного угла должен быть произведен под прямым углом к биссектрисе угла между направляющими плоскостями.
Второй вариант бесконтактного аэромагнитного линейного направляющего устройства содержит угловую направляющую 1 и каретку 2, которые размещены с зазорами 3 и 4 относительно друг друга. В каретке в два ряда выполнены дроссели 5 и 6, которые могут представлять собой калиброванные отверстия, щели или пористые проницаемые вставки, к которым по каналам 7 и 8 подается сжатый газ от внешнего источника. Внутренняя часть двугранного угла, образуемого зазорами, срезана под углом 45°, в каретке 2 размещен постоянный магнит 9 с полюсными наконечниками из магнитно-мягкого материала 10 и 11. В направляющей 1 напротив полюсных наконечников 10 и 11 размещена вставка из магнитно-мягкого материала 12.
Устройство работает следующим образом.
Полюсные наконечники 10 и 11 притягиваются к вставке 12 и прижимают каретку 2 к направляющей 1 до тех пор, пока сила давления внутри зазоров 3 и 4, которая возрастает по мере уменьшения зазора, не сравняется с составляющей магнитного притяжения, перпендикулярной каждому из зазоров 3 и 4. По достижении равновесия сил магнитного притяжения и давления отталкивания каретка фиксируется в направлениях, ортогональных направлению движения, а в направлении движения может беспрепятственно перемещаться, не испытывая сухого трения.
Конструкция содержит только одну магнитную систему и единую направляющую.
Второй вариант устройства работает точно так же, как и первый, отличаясь только более высокими удельными силовыми характеристиками.
Данный вариант исполнения устройства характеризуется тем, что дроссели на каретке размещены в два ряда. Такое размещение дросселей за счет трапецеидальной эпюры давления имеет более высокую несущую силу и жесткость.
За счет того, что направляющая представляет собой единую деталь, повышается эффективность прецизионного перемещения, повышается точность позиционирования и при этом устройство упрощается за счет использования одной магнитной системы каретки. Также снижается и материалоемкость бесконтактного аэромагнитного линейного направляющего устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКООРДИНАТНАЯ МЕТРОЛОГИЧЕСКАЯ ПЛАТФОРМА | 2007 |
|
RU2365953C1 |
| СПОСОБ БЕСКОНТАКТНОГО ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ЭЛЕМЕНТА | 2001 |
|
RU2222725C2 |
| ГИДРОДИНАМИЧЕСКИЙ СПОСОБ СТАБИЛИЗАЦИИ ЛЕНТОЧНЫХ КОНВЕЙЕРОВ ДЛЯ НЕПРЕРЫВНОГО ЛИТЬЯ С ИСПОЛЬЗОВАНИЕМ ПОСТОЯННЫХ МАГНИТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2188096C2 |
| БЕСКОНТАКТНАЯ МАГНИТНАЯ ВИНТОВАЯ ПЕРЕДАЧА И ЕЕ ВАРИАНТЫ | 2000 |
|
RU2183773C2 |
| Бесконтактная магнитная муфта-редуктор | 1979 |
|
SU864458A1 |
| Уровнемер | 1987 |
|
SU1520349A1 |
| БЕСКОНТАКТНАЯ МАГНИТНАЯ ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА | 2005 |
|
RU2293233C1 |
| БЕСКОНТАКТНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР | 1968 |
|
SU206695A1 |
| ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2178139C2 |
| СПОСОБ БЕСКОНТАКТНОЙ КОНТРОЛИРУЕМОЙ МАГНИТНО-ГИДРАВЛИЧЕСКОЙ ОЧИСТКИ ПОДШИПНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2014 |
|
RU2625878C2 |
Изобретение относится к области точной механики, а именно к устройствам прецизионного перемещения, использующим смазку сжатым газом с компенсацией аэростатических сил за счет магнитного притяжения. Бесконтактное аэромагнитное линейное направляющее устройство содержит угловую направляющую 1 и каретку 2, которые размещены с зазорами 3 и 4 относительно друг друга. В каретке выполнены дроссели 5 и 6 в виде калиброванных отверстий, щелей или пористых проницаемых вставок, к которым по каналам 7 и 8 подается сжатый газ от внешнего источника. Внутренняя часть двугранного угла, образуемого зазорами, срезана под углом 45°, и в каретке 2 размещен постоянный магнит 9 с полюсными наконечниками из магнитно-мягкого материала 10 и 11. В направляющей 1 напротив полюсных наконечников 10 и 11 размещена вставка из магнитно-мягкого материала 12. Согласно второму варианту устройство содержит дроссели, размещенные в два ряда вдоль линии движения симметрично относительно серединной линии плоскостей каретки. Изобретение направлено на повышение эффективности прецизионного перемещения, повышение точности позиционирования устройства при его упрощении и снижении материалоемкости. 2 н. и 2 з.п. ф-лы, 2 ил.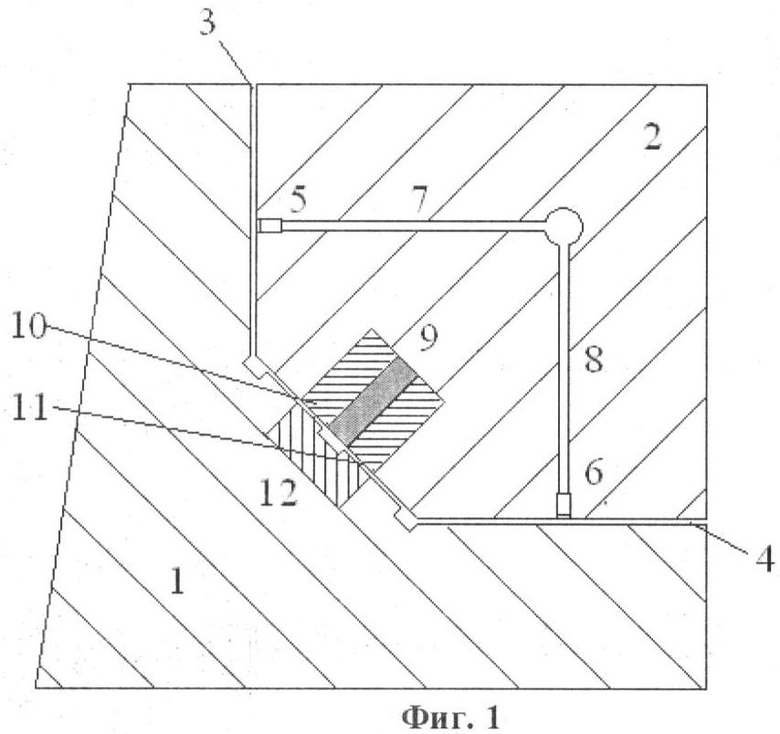
1. Бесконтактное аэромагнитное направляющее устройство, содержащее направляющую и каретку, размещенные с зазорами относительно друг друга, дроссели, размещенные в каретке и открывающиеся в указанные зазоры, и систему постоянных магнитов с полюсными наконечниками и противолежащими им вставками в направляющей из магнитно-мягкого материала, отличающееся тем, что направляющая выполнена с двумя плоскостями, расположенными параллельно линии движения и под углом друг к другу, вершина угла между указанными плоскостями срезана под прямым углом к биссектрисе этого угла, причем вставки из магнитно-мягкого материала размещены на плоскости среза вдоль направления движения, а полюсные наконечники системы постоянных магнитов каретки обращены через зазор к указанным вставкам, при этом в каретке выполнены каналы для подачи сжатого газа к дросселям от внешнего источника.
2. Бесконтактное аэромагнитное направляющее устройство по п.1, отличающееся тем, что угол между двумя плоскостями направляющей равен прямому углу.
3. Бесконтактное аэромагнитное направляющее устройство, содержащее направляющую и каретку, размещенные с зазорами относительно друг друга, дроссели, размещенные в каретке и открывающиеся в указанные зазоры, и систему постоянных магнитов с полюсными наконечниками и противолежащими им вставками в направляющей из магнитно-мягкого материала, отличающееся тем, что направляющая выполнена с двумя плоскостями, расположенными параллельно линии движения, вершина угла между указанными плоскостями срезана под прямым углом к биссектрисе этого угла, причем вставки из магнитно-мягкого материала размещены на плоскости среза вдоль направления движения, а полюсные наконечники системы постоянных магнитов обращены через зазор к указанным вставкам, при этом в каретке выполнены каналы для подачи сжатого газа к дросселям от внешнего источника, причем дроссели размещены в два ряда вдоль линии движения симметрично относительно серединной линии плоскостей каретки.
4. Бесконтактное аэромагнитное направляющее устройство по п.3, отличающееся тем, что угол между двумя плоскостями направляющей равен прямому углу.
| Направляющее устройство для бурения горизонтальных скважин | 1948 |
|
SU80665A1 |
| СПОСОБ БЕСКОНТАКТНОГО ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ЭЛЕМЕНТА | 2001 |
|
RU2222725C2 |
| DE 102008017413 A1, 08.10.2009 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

