Изобретение относится к области техники, связанной с прецизионными координатными измерениями геометрии и локальных свойств материала нано- и микроструктур, протяженных в горизонтальном направлении, в частности интегральных микросхем, микроэлектромеханических систем [MEMS] и наномеханизмов.
Из технической литературы известны устройства для исследования топографии и дефектов интегральных микросхем, выполненных на больших (до 300 мм) кремниевых пластинах [Wafers], содержащие линейный двухкоординатный привод, обычно линейный электродвигатель, датчик координат, выполненный в виде лазерного интерферометра, и систему управления с цепью, замкнутой по результирующей координате, а также прямолинейные бесконтактные направляющие, как правило, аэростатические или же аэростатические с силовым магнитным замыканием [Magnetically coupled] в вертикальном направлении. В качестве устройств, непосредственно исследующих изучаемый объект, используются электрические контактные зонды, измерительные головки атомносиловых микроскопов и оптические микроскопы ближнего (зондовые) и дальнего поля. Примером таких установок могут служить (см. каталоги фирмы Aerotech).
Однако такие устройства обладают недостаточной точностью в горизонтальной плоскости, которая значительно ниже номинального пространственного разрешения датчиков координаты и дискретности [Resolution] системы управления. С другой стороны, точность поддержания плоскостности движения, от которой существенным образом зависит точность позиционирования зондов и фокусировка микрообъективов в вертикальном направлении, в еще большей степени оказывается грубее разрешения приводов вертикального перемещения. Этот недостаток приводных систем с большим ходом [Long travel] усложняет и ограничивает использование зондовых устройств, в частности атомносиловых микроскопов в составе измерительного комплекса.
Основным источником недостатка практической точности приводной части указанных устройств и ее несоответствия высокому разрешению датчиков координат и дискретности системы управления служит недостаточная кинематическая точность неуправляемой составляющей движения, недостаточная механическая жесткость системы, а также принципиально ограниченная быстрота реакции системы на отклонение координаты исполнительного органа от номинала.
Данные недостатки частично устранены в приводах, действующих по принципу электромагнитной деформации и использующих для перемещения механическую деформацию пъезоэлектриков или материалов с большой магнитострикцией (см. например, каталоги фирмы Physical Instrument. В таких устройствах и разрешение и точность привода могут быть сделаны весьма высокими, а сами устройства обладают высокой механической жесткостью в направлении отрабатывемой координаты, что обеспечивает их высокую устойчивость относительно внешних нерегулярных силовых воздействий и соответственно высокую практическую точность.
Однако такие приводы обладают исключительно малыми ходами (максимум несколько сотен микрометров), что не позволяет использовать их для комплексного координатного исследования протяженных структур, а при исследовании повторяющихся структур не дает возможности позиционировать зонды точно над одноименными элементами отдельных структур.
Для преодоления ограничений приводов, действующих по принципу электромагнитной деформации, по дальности хода их комбинируют с указанными выше приводами с линейными двигателями, которые используются в качестве грубого привода первой ступени. Такая комбинированная двухступенчатая схема, однако, достаточно сложна и при высоком разрешении не обеспечивает метрологическую достоверность измерений на расстояниях, превышающих ход точного деформируемого привода.
Обычно в качестве оптических измерительных головок дальнего поля используются микрообъективы, входящие в состав измерительного модуля, который по своей конструкции идентичен либо классическому амплитудному микроскопу, либо конфокальному микроскопу.
Классический амплитудный микроскоп обладает недостаточным пространственным разрешением, а также не позволяет получать численную информацию о трехмерной структуре объекта. Конфокальный микроскоп обладает более высоким разрешением в плоскости изображения (латеральное разрешение), но его разрешение по высоте недостаточно для прецизионного измерения рельефа.
Для повышения разрешения указанных микроскопических модулей используется ультрафиолетовое освещение, что позволяет улучшить разрешение пропорционально длине волны света, однако остальные недостатки оптических микроскопических модулей сохраняются.
Кроме того, все перечисленные выше измерительные головки не обладают способностью получать данные о материале объекта и его физическом и напряженном состоянии.
Данные о материале объекта и его физическом состоянии получают при помощи эллипсометров, которые, однако, обладают пространственным разрешением в отношении материальных параметров намного более грубым, чем типичный размер фрагментов исследуемых наноструктур. Кроме того, они совершенно не чувствительны к локальной геометрии исследуемого объекта и поэтому пригодны только для исследования поверхности заготовок и интегрального, обобщенного по значительной площади, контроля процессов напыления тонких слоев.
Из патентной литературы известен двухкоординатный микропозиционер метрологической платформы, содержащий основание, на котором закреплен первый привод по первой координате, сопряженный посредством первого рычага и первого гибкого поводка с первой подвижной кареткой, при этом первый рычаг установлен на основании с использованием первого гибкого шарнира, а первая подвижная каретка установлена на основании посредством первых гибких направляющих, на первой подвижной каретке расположена вторая подвижная каретка посредством вторых гибких направляющих, а также содержащий второй привод по второй координате со вторым рычагом, имеющим второй гибкий шарнир, и второй гибкий поводок, а второй привод закреплен на основании и сопряжен вторым рычагом посредством второго гибкого поводка со второй подвижной кареткой, при этом второй рычаг установлен на основании с использованием второго гибкого шарнира (RU №2306621, 20.09.2007).
Известно также устройство перемещения метрологической платформы для жидкофазной нанотехнологии, содержащее неподвижную платформу, связанную с пьезоприводом, на торцевой поверхности которого закреплен зонд, электрически связанный с подложкой на рабочей поверхности которой расположена жидкость, при этом платформа связана с пьезоприводом посредством первой накладки, выполненной из магнитомягкого материала, а подложка установлена в подложкодержателе, связанном с возможностью вращения с шарикоподшипником, установленным на немагнитной опоре, жестко связанной со второй накладкой, причем первая и вторая накладки жестко связаны с полюсами электромагнита; на наружной поверхности подложкодержателя выполнена зубчатая нарезка, связанная с зубчатой шестерней, установленной на валике электродвигателя, который закреплен на неподвижной платформе (RU №48123, 2005).
Известно также устройство бесконтактного перемещения подвижного элемента метрологической платформы, в котором установлены с постоянным по величине зазором против друг друга двух элементов, каждый из которых содержит рабочие поверхности, имеющие форму, обеспечивающую постоянство зазора между элементами, соответствующие по ширине и обращенные друг к другу, причем на каждом элементе выполнены магнитные вставки из намагниченного ферромагнитного материала, выполнены на магнитных вставках канавки, причем противостоящие канавки одинаковы по ширине и разделены одинаковыми расстояниями, и подают в зазор между элементами с дросселированием сжатую текучую среду, один из элементов выполнен неподвижным, другой установлен с возможностью перемещения относительно первого и свободного бесконтактного перемещения подвижного элемента по координате, направленной вдоль канавок, каждая из которых имеет или замкнутую или незамкнутую осевую линию в виде линии постоянной кривизны при подаче среды в зазор (RU №2222725, 2004).
Известен также координатный стол, содержащий метрологическую платформу, на которой посредством устройства перемещения с первыми направляющими установлены первая каретка, вторая каретка с основанием и держатель объекта с возможностью перемещения по первой и второй взаимно перпендикулярным координатам, в устройство введены вторые направляющие, закрепленные на первой каретке, третьи направляющие, закрепленные на второй каретке, третья каретка, установленная посредством третьих направляющих на второй каретке, содержащая ферромагнитный вкладыш и держатель объекта, устройство перемещения с первыми направляющими выполнено в виде трехкоординатного пьезодвигателя, вторая каретка установлена на вторых направляющих, на платформе установлен первый магнит с возможностью перемещения и фиксации по третьей координате, перпендикулярной плоскости первой и второй координат, на второй каретке установлен второй магнит с возможностью взаимодействия с первым магнитом и ферромагнитным вкладышем третьей каретки (RU №2254640, 2005, прототип).
Недостатками известных устройств, в той или иной мере, являются узость функциональных возможностей, ограничивающая исследования трехмерной геометрии протяженных структур с нанометровым уровнем точности, малая величина хода, сложность конструкции, низкая метрологическая достоверность измерений и ее несоответствие высокому разрешению датчиков координат, недостаточная механическая жесткость системы, а также принципиально ограниченная быстрота реакции системы на отклонение координаты исполнительного органа от номинала.
Технической задачей, решаемой данным изобретением, является создание эффективной метрологической измерительной платформы и расширение арсенала метрологических измерительных платформ.
Технический результат, обеспечивающий решение поставленной задачи, состоит в расширении функциональных возможностей для исследования трехмерной геометрии протяженных структур, с манометровым уровнем точности, а также получения с тем же пространственным разрешением информации о распределении материальных параметров приповерхностного слоя исследуемого объекта с единой системой координатной привязки всех зондов и объективов, обеспечении необходимой величины хода, увеличении метрологической достоверности измерений, повышении механической жесткости системы, а также в повышении чувствительности и быстроты реакции системы на отклонение координаты исполнительного органа от номинала.
Сущность изобретения состоит в том, что многокоординатная метрологическая платформа содержит рабочий стол с нанесенными координатными метками для координатной привязки вертикально подвижных измерительных головок, а также двухкоординатный линейный привод для перемещения рабочего стола в горизонтальной плоскости во взаимно перпендикулярных направлениях по бесконтактным аэростатическим направляющим, сопрягаемые наклонные поверхности базы и каретки которых установлены с образованием зазоров для нагнетания текучей среды под давлением, а каретка одной из направляющих механически соединена с базой другой направляющей с возможностью их совместного перемещения, причем одна из направляющих выполнена с сужающейся, а другая - с расширяющейся в направлении рабочего стола кареткой, при этом на образующей зазор наклонной поверхности каретки одной из направляющих и на образующей зазор наклонной поверхности базы другой направляющей установлены постоянные магниты, а на сопрягаемых с ними поверхностях - замыкатели.
Предпочтительно постоянные магниты выполнены в виде вставок из намагниченного ферромагнитного материала с полюсными наконечниками из магнитомягкого материала, а замыкатели - из магнитомягкого материала, постоянные магниты установлены на образующих зазоры наклонных поверхностях механически соединенных каретки и базы, а на сопрягаемых с ними поверхностях - замыкатели, нижняя из аэростатических направляющих выполнена трапецеидального сечения, расширяющегося вверх к рабочему столу, а верхняя - трапецеидального сечения, сужающегося вверх к рабочему столу (ласточкин хвост), при этом база верхней направляющей соединена с кареткой нижней направляющей с возможностью их совместного перемещения, а база нижней направляющей неподвижно установлена в просвете мостовой конструкции, на которой закреплены измерительные головки, направляющие выполнены с размерами сопрягаемых поверхностей зазоров, выбранными из условия обеспечения одинакового отношения площади образующих зазор сопрягаемых поверхностей к массе подвижных частей, перемещаемых по ней, для обеих направляющих, в качестве измерительных головок используются два снабженных малоходовыми вертикальными приводами микроскопа из группы: лазерный интерференционный фазово-поляризационный микроскоп, скомбинированный с амплитудным микроскопом белого света, зондовый микроскоп, атомно-силовой микроскоп. При этом дроссельные устройства выполнены в виде калиброванных микроотверстий или в виде вставок из материала с открытой пористостью, рабочий стол снабжен средствами микронаклона его прецизионной рабочей поверхности, а также вакуумной системой фиксации образца, на рабочем столе размещены одна координатная метка с микрорельефом и другая координатная метка, представляющая собой чирпированную дифракционную решетку либо фазовую пластинку Френеля, либо голограмму с четко фиксируемой центральной точкой, а каждая из кареток снабжена приводом в виде двигателя с датчиком угла поворота и с вращающимся на валу винтом, гайка которого закреплена на каретке.
На фиг.1 изображен разрез многокоординатной метрологической платформы в плоскости координаты X, на фиг.2 - совмещенные разрезы направляющих по координатам Х и Y.
Многокоординатная метрологическая платформа содержит рабочий стол 10 с нанесенными координатными метками 12, 14 для координатной привязки вертикально подвижных измерительных головок 11, 13, а также двухкоординатный линейный привод для перемещения рабочего стола в горизонтальной плоскости во взаимно перпендикулярных направлениях по бесконтактным аэростатическим направляющим, сопрягаемые наклонные поверхности базы 2, 7 и каретки 3, 8 которых установлены с образованием зазоров для нагнетания текучей среды под давлением. Каретка 3 одной из направляющих механически соединена с базой 7 другой направляющей с возможностью их совместного перемещения. Одна из направляющих (по координате Y) выполнена с сужающейся в направлении рабочего стола 10 кареткой 8, а другая (по координате X) - с расширяющейся в направлении рабочего стола 10 кареткой 3. На образующей зазор наклонной поверхности каретки 3 одной из направляющих и на образующей зазор наклонной поверхности базы 7 другой направляющей установлены постоянные магниты 17, а на сопрягаемых с ними поверхностях - замыкатели 19.
Постоянные магниты 17 выполнены в виде вставок из намагниченного ферромагнитного материала с полюсными наконечниками 18 из магнитомягкого материала, а замыкатели 19 - из магнитомягкого материала. Постоянные магниты 17 установлены на образующих зазоры наклонных поверхностях механически соединенных каретки 3 и базы 7, а на сопрягаемых с ними поверхностях - замыкатели 19. Нижняя из аэростатических направляющих (по координате X) выполнена трапецеидального сечения, расширяющегося вверх к рабочему столу, а верхняя (по координате Y) - трапецеидального сечения, сужающегося вверх к рабочему столу 10 (ласточкин хвост). База 7 верхней направляющей соединена с кареткой 3 нижней направляющей с возможностью их совместного перемещения, а база 2 нижней направляющей неподвижно установлена на основании 1 в просвете мостовой конструкции (перекладины) 9, на которой закреплены измерительные головки 11, 13. Направляющие (по взаимно перпендикулярным координатам Х и Y) выполнены с размерами сопрягаемых поверхностей зазоров, выбранными из условия обеспечения одинакового отношения площади образующих зазор сопрягаемых поверхностей к массе подвижных частей, перемещаемых по ней для обеих направляющих (по координатам Х и Y). В качестве измерительных головок 11, 13 используются два снабженных малоходовыми вертикальными приводами 15, 16 микроскопа из группы: лазерный или амплитудный интерференционный фазово-поляризационный микроскоп, скомбинированный с амплитудным микроскопом белого света, зондовый микроскоп, атомно-силовой микроскоп, оптический микроскоп дальнего поля, и другие зондовые приборы с различными измерительными головками (туннельными, магнитными, термометрическими и оптическими головками ближнего поля).
Дроссельные устройства 20, к которым подведен сжатый газ от внешнего источника давления (не изображен), выполнены в виде калиброванных микроотверстий или в виде вставок из материала с открытой пористостью. Рабочий стол 10 снабжен средствами (не изображены) микронаклона его прецизионной рабочей поверхности, а также вакуумной системой фиксации образца (не изображены). На рабочем столе 10 размещены одна координатная метка 12 с микрорельефом и другая координатная метка 13, представляющая собой двухмерную чирпированную дифракционную решетку либо фазовую пластинку Френеля, либо голограмму с четко фиксируемой центральной точкой. Каждая из кареток 3, 8 снабжена приводом в виде подключенного к системе управления (не изображена) двигателя (мотора) 6 с датчиком 5 угла поворота и с вращающимся на валу винтом 4, гайка которого (не изображена) закреплена на каретке 3 или 8, соответственно.
Многокоординатная метрологическая платформа работает следующим образом. Линейное координатное перемещение осуществляется путем контроля угла поворота винтов 4 моторами 6 с датчиками 5 угла и системой управления. Постоянные магниты 17 с полюсными наконечниками 18 обеспечивают притяжение к замыкателю 19. Нормальная данной силе притяжения сила давления сжатого газа в зазорах направляющих создает противодействующую силу отталкивания. Величина сил магнитного притяжения слабо зависит от расстояния между полюсами, напротив, сила отталкивания очень резко связана с величиной зазора в направляющих. Баланс этих сил при заданном давлении питания устанавливается при определенном зазоре автоматически. При увеличении давления питания зазор увеличивается, при уменьшении соответственно уменьшается. На одном отдельно взятом приводе, по координатам Х или У, изменения давления приводят соответственно к подъему и опусканию каретки на величины, которые на практике могут значительно превосходить все погрешности траектории движения, которые имеют место и при абсолютном постоянстве давления. В предлагаемом техническом решении приводы по координате X и У при изменении давления питания перемещаются по вертикали в разных направлениях. При соблюдении равенства Sx/Mx=Sy/My, где Sx и Sy - площади несущих аэростатических поверхностей соответствующих координатных направляющих, Мх и My - массы их подвижных частей, а также равенстве рабочих зазоров и аэродинамического подобия дросселей и равенстве длин каналов питания от источника сжатого газа до дроссельного устройства 20, смещения привода Х и привода У по вертикали при пульсации давления (неизбежной в большей или меньшей степени) полностью синхронно друг друга компенсируют. Таким образом, устраняется наиболее часто встречающийся источник погрешности положения стола 10 по вертикали.
Исследуемый объект размещается на поверхности стола 10, который для случая работы с плоскими объектами снабжен вакуумным фиксатором, а также устройством микронаклона стола. Измерения осуществляются следующим образом: одна из измерительных головок, например фазово-поляризационный микроскоп 11, позиционируется при помощи перемещения моторами 6 по осям Х и У над меткой 12. Далее оператор вручную или автоматически фокусирует объектив прибора и устанавливает стол 10 так, чтобы метка 12 была совмещена с оптической осью объектива 11. Отсчеты координат Х и У объявляются равными нулю. Далее перемещая микроскоп 11 по координатам Х и У оператор выбирает интересующий его фрагмент объекта и исследует его при помощи микроскопа 11, при этом фокусировка осуществляется при помощи координатного вертикального привода микроперемещений 15. Завершив обследование фрагмента объекта оператор фиксирует координаты Хо и Уо интересующего фрагмента объекта в памяти системы управления. Затем осуществляется наведение другой измерительной головки, например зонда атомносилового модуля 13, на середину соответствующей метки 14. Данное положение по осям Х и У снова объявляется нулевым. Далее в систему управления по координатам Х и У вводятся координаты Хо и Уо, что приводит зонд атомносилового микроскопа 13 к интересующему фрагменту уже обследованного при помощи микроскопа 11, что позволяет обследовать этот фрагмент с большим разрешением или определять его физические параметры, недоступные для предыдущего измерительного модуля, сохраняя при этом абсолютную координатную привязку.
Предлагаемая многокоординатная метрологическая платформа обеспечивает исследование с помощью измерительных головок 11, 13, которые последовательно с высокой точностью позиционируются в горизонтальной плоскости по координатам Х и Y над выбранным фрагментом исследуемой протяженной наноструктуры, а также точно позиционируются и фокусируются в вертикальной плоскости, причем колебания давления питания аэростатических направляющих не вносят погрешностей в результаты измерений и позиционирования.
Платформа обеспечивает последовательное измерение параметров одного и того же избранного фрагмента протяженной наноструктуры при помощи измерительных головок (зондов и объективов) 11, 13, использующих различные физические принципы, различные длины волн и различные измерительные техники. Такие измерения позволяют получать значительный объем перекрестно коррелированной информации об исследуемой структуре с высоким пространственным разрешением и единой координатной привязкой.
Таким образом, создана эффективная метрологическая измерительная платформа и расширен арсенал метрологических измерительных платформ.
При этом расширены функциональные возможности для исследования трехмерной геометрии протяженных структур с нанометровым уровнем точности, а также для получения с тем же пространственным разрешением информации о распределении материальных параметров приповерхностного слоя исследуемого объекта с единой системой координатной привязки всех зондов и объективов, обеспечении необходимой величины хода, увеличена метрологическая достоверность измерений, повышена механическая жесткость системы, а также повышены чувствительность и быстрота реакции системы на отклонение координаты исполнительного органа от номинала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2008 |
|
RU2385220C1 |
| ИЗОБРАЖАЮЩИЙ МИКРОЭЛЛИПСОМЕТР | 2010 |
|
RU2503922C2 |
| БЕСКОНТАКТНОЕ АЭРОМАГНИТНОЕ ЛИНЕЙНОЕ НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2009 |
|
RU2451590C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗЫ ОБЪЕКТНОГО ПУЧКА НА ПИКСЕЛЕ ФОТОПРИЕМНИКА И СПОСОБ ПОЛУЧЕНИЯ ФАЗОВОГО ПОРТРЕТА ОБЪЕКТА | 2011 |
|
RU2463552C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МИКРОРЕЛЬЕФА ОБЪЕКТА И ОПТИЧЕСКИХ СВОЙСТВ ПРИПОВЕРХНОСТНОГО СЛОЯ, МОДУЛЯЦИОННЫЙ ИНТЕРФЕРЕНЦИОННЫЙ МИКРОСКОП ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2001 |
|
RU2181498C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ МИКРОРЕЛЬЕФА ОБЪЕКТА | 2012 |
|
RU2495372C1 |
| Магнитная винтовая передача | 1983 |
|
SU1219850A1 |
| СПОСОБ БЕСКОНТАКТНОГО ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ЭЛЕМЕНТА | 2001 |
|
RU2222725C2 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТА | 2012 |
|
RU2517962C1 |
| КООРДИНАТНЫЙ СТОЛ, ПОРТАЛ КООРДИНАТНОГО СТОЛА И СПОСОБ ИЗГОТОВЛЕНИЯ ИНДУКТОРА МНОГОФАЗНОГО ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1998 |
|
RU2133184C1 |
Изобретение относится к областям техники, связанным с прецизионными координатными измерениями геометрии и локальных свойств материала нано- и микроструктур, протяженных в горизонтальном направлении, в частности интегральных микросхем, микроэлектромеханических систем и наномеханизмов. Изобретение направлено на расширение функциональных возможностей, увеличение достоверности измерений, повышение механической жесткости системы, а также на повышение чувствительности и быстроты реакции системы на отклонение координаты исполнительного органа от номинала. Этот результат обеспечивается за счет того, что многокоординатная метрологическая платформа содержит рабочий стол с нанесенными координатными метками для координатной привязки вертикально подвижных измерительных головок, а также двухкоординатный линейный привод для перемещения рабочего стола в горизонтальной плоскости во взаимно перпендикулярных направлениях по бесконтактным аэростатическим направляющим, сопрягаемые наклонные поверхности базы и каретки которых установлены с образованием зазоров для нагнетания текучей среды под давлением. Каретка одной из направляющих механически соединена с базой другой направляющей с возможностью их совместного перемещения. Одна из направляющих (по координате Y) выполнена с сужающейся, а другая (по координате X) - с расширяющейся в направлении рабочего стола кареткой. На образующей зазор наклонной поверхности каретки одной из направляющих и на образующей зазор наклонной поверхности базы другой направляющей установлены постоянные магниты, а на сопрягаемых с ними поверхностях - замыкатели. Постоянные магниты выполнены в виде вставок из намагниченного ферромагнитного материала с полюсными наконечниками из магнитомягкого материала, а замыкатели - из магнитомягкого материала. База верхней направляющей соединена с кареткой нижней направляющей, а база нижней направляющей неподвижно установлена в мостовой конструкции, на которой закреплены измерительные головки. В качестве измерительных головок - лазерный или амплитудный интерференционный фазово-поляризационный микроскоп. 9 з.п. ф-лы, 2 ил.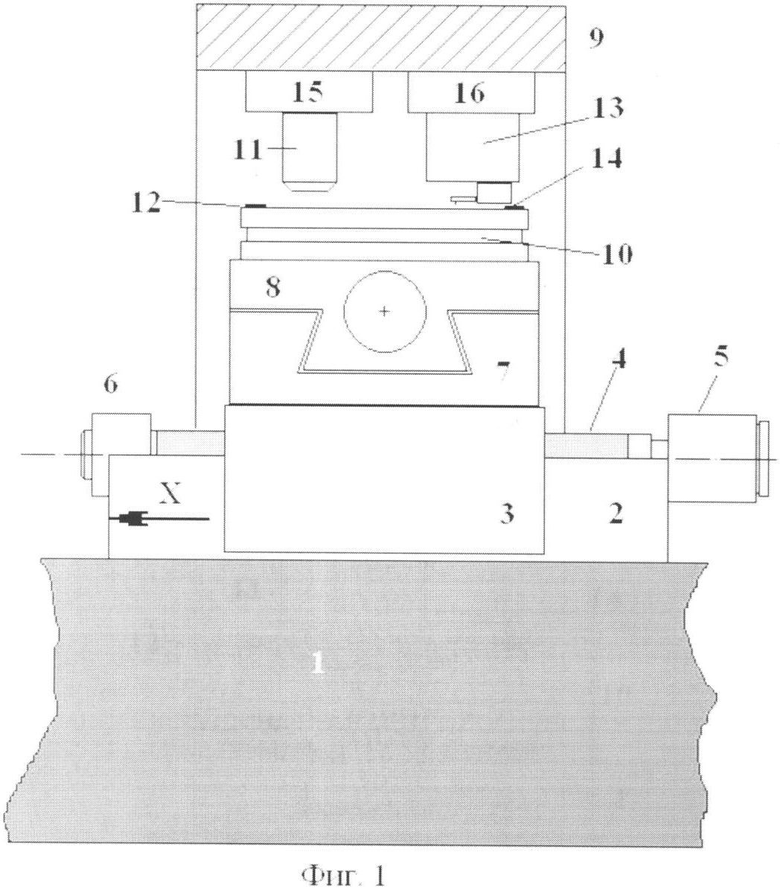
1. Многокоординатная метрологическая платформа, содержащая рабочий стол с нанесенными координатными метками для координатной привязки вертикально подвижных измерительных головок, а также двухкоординатный линейный привод для перемещения рабочего стола в горизонтальной плоскости во взаимно перпендикулярных направлениях по бесконтактным аэростатическим направляющим, сопрягаемые наклонные поверхности базы и каретки которых установлены с образованием зазоров для нагнетания текучей среды под давлением, а каретка одной из направляющих механически соединена с базой другой направляющей с возможностью их совместного перемещения, причем одна из направляющих выполнена с сужающейся, а другая - с расширяющейся в направлении рабочего стола кареткой, при этом на образующей зазор наклонной поверхности каретки одной из направляющих и на образующей зазор наклонной поверхности базы другой направляющей установлены постоянные магниты, а на сопрягаемых с ними поверхностях - замыкатели.
2. Платформа по п.1, отличающаяся тем, что постоянные магниты выполнены в виде вставок из намагниченного ферромагнитного материала с полюсными наконечниками из магнитомягкого материала, а замыкатели - из магнитомягкого материала.
3. Платформа по любому из пп.1 и 2, отличающаяся тем, что постоянные магниты установлены на образующих зазоры наклонных поверхностях механически соединенных каретки и базы, а на сопрягаемых с ними поверхностях - замыкатели.
4. Платформа по любому из пп.1 и 2, отличающаяся тем, что нижняя из аэростатических направляющих выполнена трапецеидального сечения, расширяющегося вверх к рабочему столу, а верхняя - трапецеидального сечения, сужающегося вверх к рабочему столу (ласточкин хвост), при этом база верхней направляющей соединена с кареткой нижней направляющей с возможностью их совместного перемещения, а база нижней направляющей неподвижно установлена в просвете мостовой конструкции, на которой закреплены измерительные головки.
5. Платформа по любому из пп.1 и 2, отличающаяся тем, что направляющие выполнены с размерами сопрягаемых поверхностей зазоров, выбранными из условия обеспечения одинакового отношения площади образующих зазор сопрягаемых поверхностей к массе подвижных частей, перемещаемых по ней, для обеих направляющих.
6. Платформа по любому из пп.1 и 2, отличающаяся тем, что в качестве измерительных головок используются два снабженных малоходовыми вертикальными приводами микроскопа из группы: лазерный интерференционный фазово-поляризационный микроскоп, скомбинированный с амплитудным микроскопом белого света, зондовый микроскоп, атомно-силовой микроскоп.
7. Платформа по любому из пп.1 и 2, отличающаяся тем, что дроссельные устройства выполнены в виде калиброванных микроотверстий или в виде вставок из материала с открытой пористостью.
8. Платформа по любому из пп.1 и 2, отличающаяся тем, что рабочий стол снабжен средствами микронаклона его прецизионной рабочей поверхности, а также вакуумной системой фиксации образца.
9. Платформа по любому из пп.1 и 2, отличающаяся тем, что на рабочем столе размещены одна координатная метка с микрорельефом и другая координатная метка, представляющая собой чирпированную дифракционную решетку либо фазовую пластинку Френеля, либо голограмму с четко фиксируемой центральной точкой.
10. Платформа по любому из пп.1 и 2, отличающаяся тем, что каждая из кареток снабжена приводом в виде двигателя с датчиком угла поворота и с вращающимся на валу винтом, гайка которого закреплена на каретке.
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| Устройство для наблюдения за качеством ткани | 1936 |
|
SU48123A1 |
| ДВУХКООРДИНАТНЫЙ МИКРОПОЗИЦИОНЕР | 2006 |
|
RU2306621C1 |
| СПОСОБ БЕСКОНТАКТНОГО ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО ЭЛЕМЕНТА | 2001 |
|
RU2222725C2 |
| УПРАВЛЕНИЕ ВЕРСИЯМИ ПРЕЦЕДЕНТОВ | 2012 |
|
RU2602783C2 |
| УПРАВЛЯЕМАЯ ИНЖЕКЦИЯ ТВЕРДЫХ ЧАСТИЦ | 2012 |
|
RU2627091C2 |

