Изобретение относится к точной механике и механотронике, а точнее к способу бесконтактного прецизионного перемещения, а именно к способу бесконтактного перемещения подвижного элемента.
Предлагаемый способ может быть использован в приборостроении как позиционер или его составляющая, в приводах подач сверхточных станков, роботов, а также в аналогичных целях в системах микроэлектромеханики и нанотехнологии.
Предлагаемый способ обеспечивает бесконтактное перемещение по трехмерным пространственным траекториям с предельно высокой повторяемостью указанных траекторий в условиях внешних нерегулярных силовых воздействий.
Известен магнитный подшипник, в котором происходит бесконтактная левитация подвижного элемента относительно неподвижного (см. Каталог фирмы Revolve "RMBI MBControl Page", р.1, 2001).
Левитация происходит за счет, с одной стороны, компенсации силы тяжести силами магнитного притяжения или отталкивания, а с другой стороны, устранения неустойчивости магнитной силовой связи за счет следящей системы с датчиками величины зазора и устройствами регулирования тока в электромагнитах.
Недостатками известного изобретения являются:
- недостаточные статическая и динамическая жесткости;
- недостаточная точность и повторяемость траектории;
- громоздкость устройства.
Известна аэростатическая направляющая с магнитным силовым замыканием, с помощью которой осуществлен способ бесконтактного перемещения элементов, включающий установку с зазором друг против друга подвижного и неподвижного элементов, каждый из которых содержит рабочие поверхности с магнитными вставками, соответствующие по ширине и обращенные друг к другу, и подачу в зазор между элементами с дросселированием сжатой текучей среды (см. Каталог фирмы ANORAD "MG-N250-250 Specifications ", p.1, 2001 г.).
В известном способе использованы магнитные силы, устраняющие силовую неустойчивость магнитостатической системы путем подачи с дросселированием в зазор между притягивающимися друг к другу магнитными силами элементами сжатой текучей среды. При этом текучая среда обеспечивает бесконтактное разделение подвижного и неподвижного элементов.
Кроме того, механические напряжения на обращенных друг к другу поверхностях, возникающие за счет сил магнитного притяжения, уравновешиваются в среднем силами давления сжатой текучей среды, приложенными к той же поверхности, что и магнитные силы.
Это позволяет практически полностью устранить внутренние напряжения, обусловленные только силами, обеспечивающими режим бесконтактного перемещения и связанные с ними деформации, ухудшающие точность известного способа
Однако в известном техническом решении фиксируют между элементами только направление нормальное к зазору, так, например, в прямолинейной направляющей фиксируют только вертикальное перемещение, а направления вперед-назад и влево-вправо остаются свободными.
Для того чтобы фиксировать одно из этих направлений, необходимо вводить, дополнительно, по-крайней мере, еще одну систему бесконтактной направляющей (любой природы), что значительно усложняет конструкцию.
Еще одним из недостатков известной конструкции является то, что, поскольку баланс между магнитными силами и силами давления сжатой текучей среды обеспечиваeтся за счет изменения зазора, колебания давления текучей среды приводят к колебаниям величины зазора и, следовательно, к ошибке позиционирования в направлении, нормальном зазору.
Наиболее близкой по технической сущности к предлагаемому техническому решению является бесконтактная магнитная передача, позволяющая осуществлять способ бесконтактного перемещения подвижного элемента, включающий установку с зазором друг против друга подвижного и неподвижного элементов, каждый из которых содержит рабочие поверхности, соответствующие по ширине и обращенные друг к другу, причем на подвижном и неподвижном элементах выполняют магнитные вставки из намагниченного ферромагнитного материала, и на магнитных вставках выполняют канавки, заполненные немагнитным материалом, а противостоящие канавки равны по ширине, и подачу в зазор между элементами с дросселированием сжатой текучей среды (см. А.С. 1219850 по кл. F 16 H 25/24, 1983 г.).
Известное решение позволяет осуществить бесконтактное преобразование вращательного движения в поступательное.
Однако принцип обеспечения перемещения элементов с помощью известного из прототипа привода не позволяет эффективно использовать их в качестве самостоятельной направляющей для прецизионного перемещения.
Технической задачей, решаемой предлагаемым способом, является обеспечение свободного бесконтактного перемещения по одной координате подвижного элемента и бесконтактная фиксация его по двум остающимся линейно независимым координатам.
Технический результат в предлагаемом изобретении достигают созданием способа бесконтактного перемещения подвижного элемента, заключающегося в установке с постоянным по величине зазором друг против друга двух элементов, каждый из которых содержит рабочие поверхности, обеспечивающие постоянство зазора между элементами, соответствующие по ширине и обращенные друг к другу, причем на каждом элементе выполняют магнитные вставки из намагниченного ферромагнитного материала, в выполнении на магнитных вставках канавок, причем противостоящие канавки одинаковы по ширине и разделены одинаковыми расстояниями, и в подаче в зазор между элементами с дросселированием сжатой текучей среды, в котором, согласно изобретению, один из элементов выполняют неподвижным, а другой устанавливают с возможностью перемещения относительно первого и осуществляют свободное бесконтактное перемещение подвижного элемента по координате, направленной вдоль канавок, каждая из которых имеет или замкнутую или незамкнутую осевую линию в виде линии постоянной кривизны при подаче среды в зазор.
Поскольку перемещение без изменения величины зазора между рабочими поверхностями возможно только для пар плоскостей, пар соосных поверхностей вращения и цилиндрических винтовых поверхностей с произвольной образующей и с постоянным шагом, то поверхности обращенных друг к другу подвижного и неподвижного элементов должны быть соответственно парами параллельных плоскостей либо соосными поверхностями вращения, либо винтовыми поверхностями постоянного шага (одно- или многозаходные).
В случае винтовых поверхностей канавки имеют тот же шаг, что и винтовые поверхности, а расстояние между канавками меньше шага.
Поскольку отрезок трехмерной пространственной линии может перемещаться вдоль другой пространственной линии, совпадая с ней во всех своих точках, тогда и только тогда, когда и отрезок, и линия имеют всюду постоянную и равную кривизну, то серединные линии канавок могут образовывать семейство параллельных прямых, семейство соосных (в частности, концентрических) окружностей и семейство цилиндрических винтовых линий постоянного шага.
Таким образом, может быть обеспечено прецизионное перемещение выбранной точки подвижного элемента привода по прямой, по окружности и по цилиндрической винтовой линии с постоянным шагом.
Преимуществом предлагаемого способа является возможность обеспечения бесконтактной фиксации двух из трех независимых координат пространственного перемещения подвижного объекта при наличии одного зазора. Так, в частности, в случае линейного перемещения для обеспечения фиксации двух поперечных координат и обеспечения свободного перемещения по третьей достаточно двух элементов, у которых прецизионного исполнения требуют только две обращенные друг к другу плоскости и система параллельных канавок.
При этом получающаяся погрешность плоскостности перемещения, за счет усреднения влияния неровностей поверхностей в пленке сжатой текучей среды, существенно меньше, чем величина неровностей, а погрешность прямолинейности перемещения, за счет усреднения влияния неточностей прямолинейности канавок, также существенно меньше этих неточностей.
Отсутствие необходимости силового замыкания направляющих по второй координате устраняет необходимость обеспечения трудновыполнимой и трудной для поддержания в процессе работы прецизионной параллельности и соосности пространственно разделенных элементов направляющих, принадлежащих разным поверхностям и осуществляющих указанное силовое замыкание.
Кроме того, устранение большого числа компонентов направляющих упрощает конструкцию и технологию, а также оставляет дополнительное пространство для размещения функциональных компонентов конструкции, не связанных с обеспечением собственно перемещения.
Точность фиксации координаты в направлении, нормальном направлению канавок, не зависит от пульсаций давления сжатой текучей среды.
Проведенные патентные исследования показали, что не известны технические решения с указанной совокупностью существенных признаков в аналогичных способах перемещения подвижного элемента в бесконтактной передаче, т.е. предлагаемое решение соответствует критерию "новизна".
При анализе известных аналогов и прототипа не обнаружено предложение с совокупностью существенных признаков, изложенных в формуле изобретения, из чего следует, что для специалистов, занимающихся прецизионным бесконтактным перемещением элементов, оно явным образом не следует из уровня техники и, следовательно, соответствует критерию изобретения "изобретательский уровень".
Считаем, что сведений, изложенных в материалах заявки, достаточно для практического осуществления изобретения
Сущность предлагаемого изобретения поясняется нижеследующим описанием способа перемещения подвижного элемента в бесконтактной передаче и чертежами, где:
на фиг.1 показана схема устройства, предназначенного для реализации предлагаемого способа;
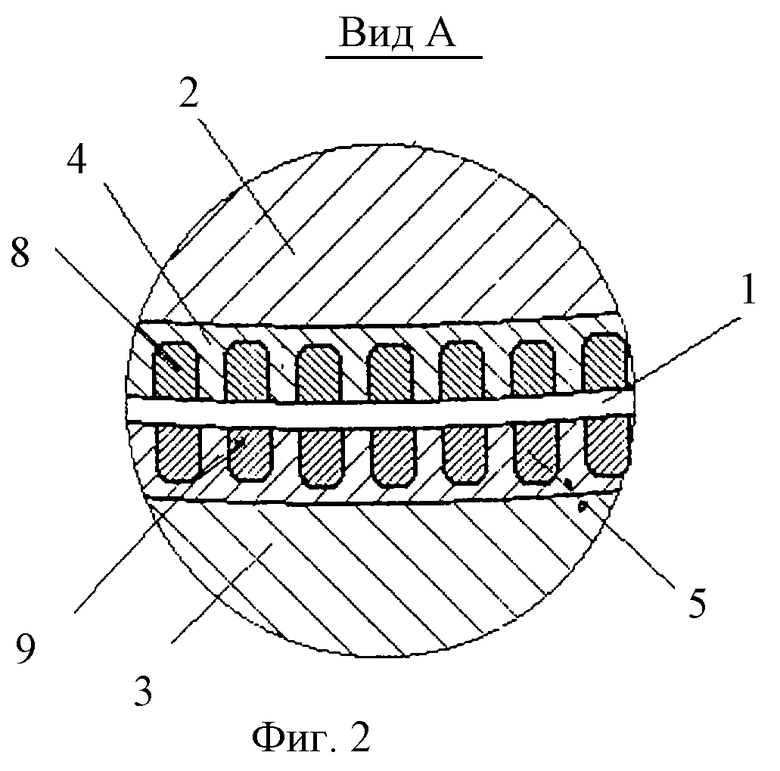
на фиг.2 - вид А фиг.1;
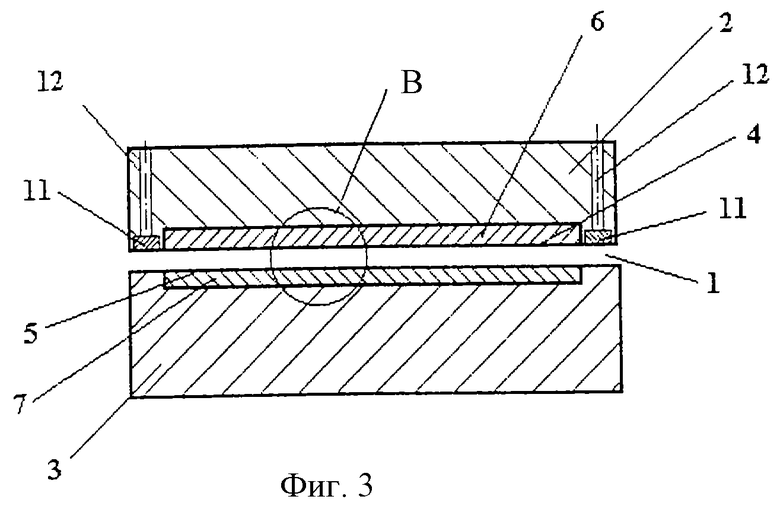
на фиг.3 показана схема устройства, предназначенного для реализации способа в случае линейного перемещения;
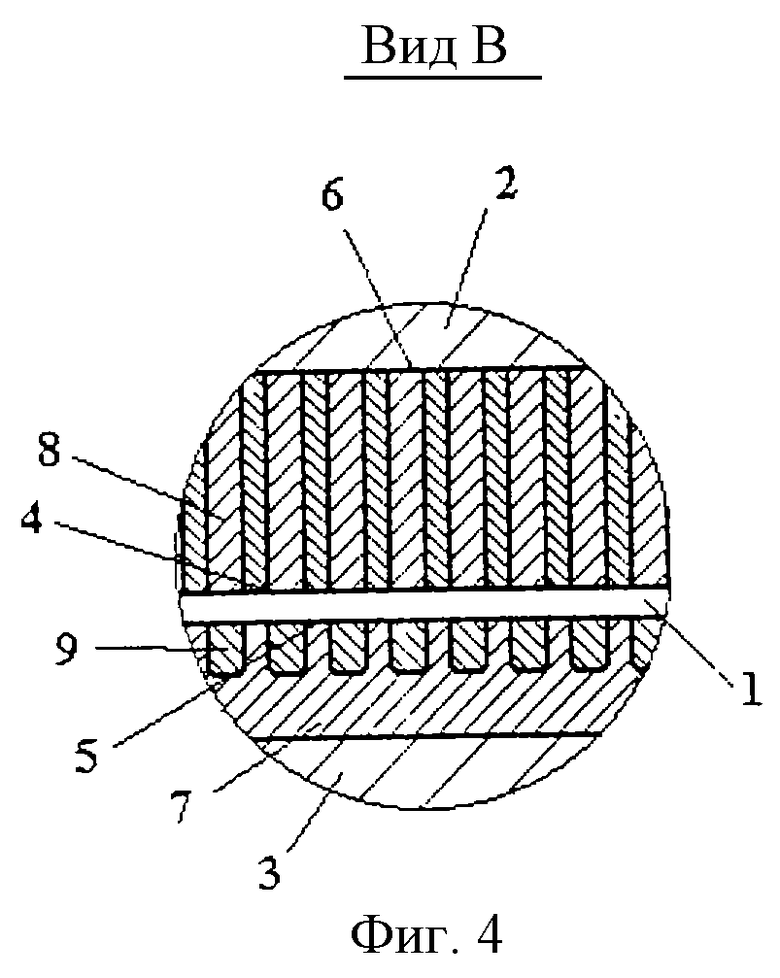
на фиг.4 - вид В фиг.3.
Устройство для реализации предлагаемого способа содержит установленные с постоянным по величине зазором 1 друг против друга два элемента (подвижный 2 и неподвижный 3), каждый из которых содержит рабочие поверхности 4 и 5, имеющие форму, обеспечивающую постоянство зазора 1 между элементами при их взаимном перемещении, соответствующие по ширине и обращенные друг к другу, причем на подвижном элементе 2 выполняют магнитные вставки 6 из намагниченного ферромагнитного материала, а на другом элементе 3 - магнитную вставку 7 из магнитно-мягкого материала, и выполненные на магнитных вставках 6, 7 эквидистантные друг другу канавки 8, 9, каждая из которых имеет или замкнутую или незамкнутую осевую линию в виде линии постоянной кривизны.
Зазор 1 между элементами предназначен для подачи в него с дросселированием сжатой текучей среды.
Причем каждая из рабочих поверхностей 4, 5 может содержать отдельный полюс постоянного магнита либо совокупность четного числа разноименных полюсов.
При размещении источника магнитного потока на подвижном элементе 2 он будет выполнять роль магнитно-активного элемента. На рабочей поверхности 4 элемента 2 размещены дроссельные элементы 11 для подачи сжатой текучей среды в зазор 1 между поверхностями 4 и 5 через каналы 12 от внешнего источника сжатой текучей среды (на фиг. не показан).
Размещение и конструкция дросселей общеизвестны и авторы не претендуют на их новизну.
Магнитные вставки 6 подвижного элемента 2 и соответственно 7 неподвижного элемента 3 при сближении притягиваются друг к другу в направлении, нормальном зазору, магнитными силами. Сжатая текучая среда, потерявшая часть начального избыточного давления на дроссельных элементах 11, теряет остаток этого давления за счет вязкого трения между поверхностями 4 и 5.
Этот остаток определяет силу, отжимающую поверхности 4 и 5 друг от друга.
При уменьшении зазора 1 сила отжима возрастает, при увеличении - уменьшается. Сила нормального магнитного притяжения практически не зависит от зазора при его величинах, характерных для аэро(гидро)статических подшипников.
Таким образом, при постоянном давлении элементы 2 и 3 самоустанавливаются с некоторым постоянным зазором друг относительно друга, и они дополнительно, за счет бокового притяжения намагниченных гребней, разделяющих канавки 8, 9, устанавливаются так, что канавки оказываются друг против друга.
В таком положении любое смещение вдоль зазора 1 в направлении, нормальном направлению канавок 8, 9, будет вызывать тангенциальную возвращающую силу за счет бокового притяжения гребней, разделяющих канавки 8 и 9.
Таким образом, осуществляется прецизионная фиксация двух координат, нормальных относительно направления канавок, и обеспечивается прецизионное перемещение вдоль канавок. Жесткость вдоль зазора 1 в направлении, нормальном канавкам 8, 9, обратно пропорциональна шагу канавок.
Существующие в настоящее время технологии позволяют обеспечить выполнение канавок с шагом в несколько десятков микрометров, что обеспечивает удельные параметры жесткости в пределах 10-30 ньютонов на микрометр, сантиметр квадратный, что примерно соответствует жесткости в направлении, нормальном зазору.
При перемещении вдоль полной окружности, ее дуги и вдоль винтовой поверхности в способе бесконтактного перемещения элементов, по крайней мере, один из элементов 2 или 3 может не быть замкнутым.
В этом случае зазор 1 между поверхностями 6 и 7 самоустанавливается в зависимости от соотношения давления текучей среды и величины сил магнитного притяжения.
В случае, когда поверхности магнитных вставок неплоские, например цилиндрические или винтовые, канавки 8 и 9 являются направляющими цилиндра или винтовыми линиями, величина зазора 1 между магнитными вставками 6 и 7 элементов 2 и 3 определяется в основном разностью внутреннего диаметра элемента 2 и наружного диаметра элемента 3.
В этом случае полной компенсации магнитных сил и сил отжима может не произойти и элементы 2 и 3 будут деформироваться.
В качестве примера конкретной реализации способа приведем реализацию способа при прямолинейном перемещении (фиг.3)
Для этого на подвижном 2 и неподвижном 3 элементах создают две плоские рабочие поверхности 4, 5. На подвижном 2 и неподвижном 3 элементах установлены магнитные вставки 6 и 7 из магнитомягкого материала, и в них выполнены параллельные канавки 8 и 9. Причем канавки 8 выполнены с постоянным шагом и заполнены магнитотвердым материалом с взаимно встречным у смежных канавок намагничением, направленным поперек канавок. Ширина и шаг канавок 9 равны ширине и шагу канавок 8, а их глубина меньше толщины магнитной вставки 7.
Длина неподвижного элемента 3 в направлении вдоль канавок больше, чем соответствующая длина подвижного элемента 2.
Часть подвижного элемента 2, непосредственно прилегающую к вставке 6, выполняют из немагнитного материала. По периферии элемента 2 размещают дроссели 11 типа пористых вставок, к которым по каналам 12 подают среду от внешнего источника.
Часть неподвижного элемента 3, непосредственно примыкающая к вставке 7, может быть выполнена из любого материала.
В качестве материала магнитных вставок 6, 7 используют магнитомягкие сплавы с высокой индукцией насыщения, например 27КХ или 49КФ, а в качестве магнитотвердых материалов используют магнитопласты на основе сплавов FeNdB и Sm2Со17, чередуя их в смежных канавках.
Магнитное давление, которое создается за счет притяжения магнитомягких сплавов в условиях их полного насыщения, несколько превышает 2 МПа.
В конструкции, реализующей предлагаемый способ, площадь магнитных полюсов, равная площади гребней между канавками 8 и 9, составляет около 30% от площади рабочей поверхности 4 подвижного элемента 2, находящейся под избыточным давлением пленки сжатой среды, подаваемым через дроссели 11 в зазор между рабочими поверхностями 4 и 5.
Таким образом, для того чтобы преодолеть магнитное притяжение элементов 2 и 3, среднее давление в зазоре 1 составляет около 600 кПа, что с учетом оптимального коэффициента дросселирования требует давления среды от внешнего источника на уровне 0,9-1 МПа.
Эти параметры в 5-10 раз превосходят аналогичные параметры известных бесконтактных направляющих.
Число канавок на одной направляющей достигает порядка нескольких тысяч. За счет усреднения случайной погрешности непрямолинейности канавок результирующая погрешность прямолинейности перемещения подвижного элемента уменьшает примерно в 50 раз прямолинейность канавок, что при перемещениях порядка 100 мм обеспечивает прямолинейность в пределах единиц ангстрем.
При монтаже подвижный и неподвижный элементы 2 и 3 прецизионно самоустанавливаются, чем полностью снимается проблема юстировки привода с использованием предлагаемого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКООРДИНАТНАЯ МЕТРОЛОГИЧЕСКАЯ ПЛАТФОРМА | 2007 |
|
RU2365953C1 |
| БЕСКОНТАКТНАЯ МАГНИТНАЯ ВИНТОВАЯ ПЕРЕДАЧА И ЕЕ ВАРИАНТЫ | 2000 |
|
RU2183773C2 |
| БЕСКОНТАКТНАЯ МАГНИТНАЯ ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА | 2005 |
|
RU2293233C1 |
| БЕСКОНТАКТНОЕ АЭРОМАГНИТНОЕ ЛИНЕЙНОЕ НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2009 |
|
RU2451590C2 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2008 |
|
RU2385220C1 |
| МАГНИТОТЕПЛОВОЕ УСТРОЙСТВО | 2000 |
|
RU2167338C1 |
| УПРАВЛЯЕМЫЙ МАГНИТНЫЙ ПОДШИПНИК НА ПОСТОЯННЫХ МАГНИТАХ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2563884C2 |
| УЧАСТОК ПОГРУЖНОЙ ТРУБЫ | 2013 |
|
RU2654405C2 |
| Двухкоординатный шаговый электродвигатель | 1980 |
|
SU1083305A1 |
| Аэростатический измеритель линейных перемещений | 2024 |
|
RU2829305C1 |
Изобретение относится к точной механике и механотронике. Способ бесконтактного перемещения подвижного элемента заключается в установке с постоянным по величине зазором друг против друга двух элементов. Один из элементов выполняют неподвижным, другой устанавливают с возможностью перемещения относительно неподвижного элемента. На каждом элементе выполняют магнитные вставки из намагниченного ферромагнитного материала. На магнитных вставках выполняют канавки, причем противостоящие канавки одинаковы по ширине и разделены одинаковыми расстояниями. В зазор между элементами подают с дросселированием сжатую текучую среду. Свободное бесконтактное перемещение подвижного элемента осуществляют по координате, направленной вдоль канавок, каждая из которых имеет замкнутую или незамкнутую осевую линию в виде линии постоянной кривизны при подаче среды в зазор. Технический результат - повышение точности перемещения подвижного элемента. 4 ил.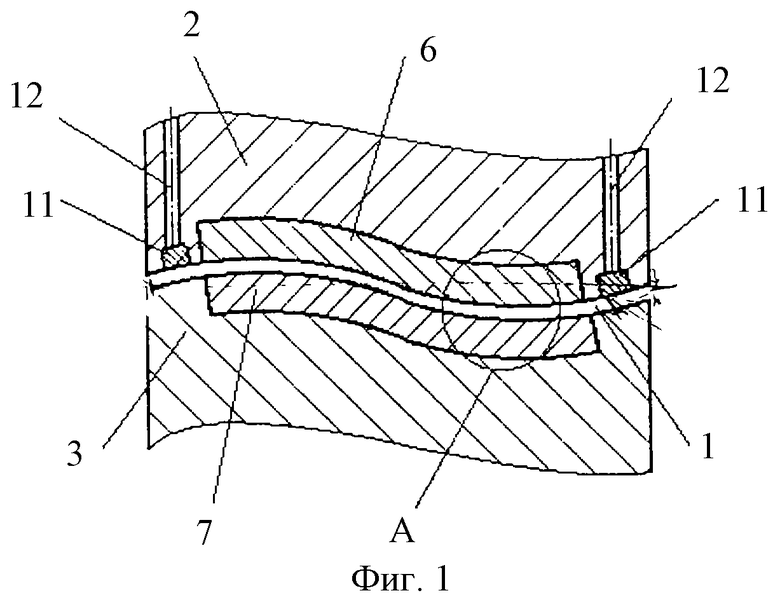
Способ бесконтактного перемещения подвижного элемента, заключающийся в установке с постоянным по величине зазором друг против друга двух элементов, каждый из которых содержит рабочие поверхности, имеющие форму, обеспечивающую постоянство зазора между элементами, соответствующие по ширине и обращенные друг к другу, причем на каждом элементе выполняют магнитные вставки из намагниченного ферромагнитного материала, выполняют на магнитных вставках канавки, причем противостоящие канавки одинаковы по ширине и разделены одинаковыми расстояниями, и подают в зазор между элементами с дросселированием сжатую текучую среду, отличающийся тем, что один из элементов выполняют неподвижным, другой устанавливают с возможностью перемещения относительно первого и осуществляют свободное бесконтактное перемещение подвижного элемента по координате, направленной вдоль канавок, каждая из которых имеет или замкнутую или незамкнутую осевую линию в виде линии постоянной кривизны при подаче среды в зазор.
| Магнитная винтовая передача | 1983 |
|
SU1219850A1 |
| МЕТАЛЛОВОЗДУШНЫЙ ХИМИЧЕСКИЙ ИСТОЧНИК ТОКА | 1994 |
|
RU2093930C1 |
| ЖЕВАТЕЛЬНЫЙ ПРОДУКТ ИЛИ ЛАКОМСТВО ДЛЯ ДОМАШНИХ ЖИВОТНЫХ (ВАРИАНТЫ) И СПОСОБ ЕГО ПРОИЗВОДСТВА | 2006 |
|
RU2414142C2 |
| Способ первичной фармакологической оценки специфической антигипоксической активности препарата | 2015 |
|
RU2612266C1 |

