Изобретение относится к способам обработки цифровых медицинских рентгеновских изображений, получаемых методом конусно-лучевой компьютерной томографии.
Известен способ формирования медицинского изображения объекта по патенту США №9087404 В2, включающий получение включающем получение методом конусно-лучевой компьютерной томографической визуализации проекционных снимков объекта с помощью детектора, смещенного от центра вращения таким образом, что детектор при движении охватывает, по меньшей мере, половину ширины визуализируемого объекта, расчет корректирующего объема во время итеративного этапа обновления в области изображения с нормализацией взвешивания проекционных данных таким образом, чтобы веса корректирующего объема были постоянными по всему пространству изображения, формирование реконструкции изображения.
Недостаток способа заключается в недостаточной точности реконструкции изображения всего визуализируемого объекта, а также в большой затрате вычислительных ресурсов на расчет корректирующего объема.
Техническим результатом заявляемого способа является повышение точности реконструируемого изображения визуализируемого объекта за счет осуществления реконструкции изображения объекта, полученного посредством сбора проекционных данных визуализации от детектора, смещенного от центра вращения за счет уменьшения артефактов изображения, возникающих из-за смещения детектора относительно центра вращения, одновременно со снижением затрат вычислительных ресурсов, по сравнению с известным способом по патенту США №9087404 В2.
Способ формирования медицинского изображения объекта в устройстве конусно-лучевой компьютерной томографической визуализации, включающий получение проекционных снимков объекта с помощью детектора, смещенного от центра вращения таким образом, что детектор при движении охватывает, по меньшей мере, половину ширины визуализируемого объекта, расчет корректирующего объема, реконструкцию изображения итерационным способом из набора взвешенных проекционных данных конусного пучка, полученного во время полного поворота источника рентгеновского излучения и детектора вокруг оси вращения, технический результат достигается тем, что на проекционных снимках определяют проекцию оси вращения системы источник - детектор, с учетом данных о проекции оси вращения осуществляют взвешивание проекционных данных, по крайней мере, один раз на этапе подготовки проекционных снимков и рассчитывают корректирующий объем.
В заявляемом способе корректирующий объем может быть заменен на корректирующий коэффициент.
Корректирующий объем, основанный на модели системы, и учитывающий желательную мощность каждого фактора коррекции изображения, может быть рассчитан предварительно на этапе подготовки проекций.
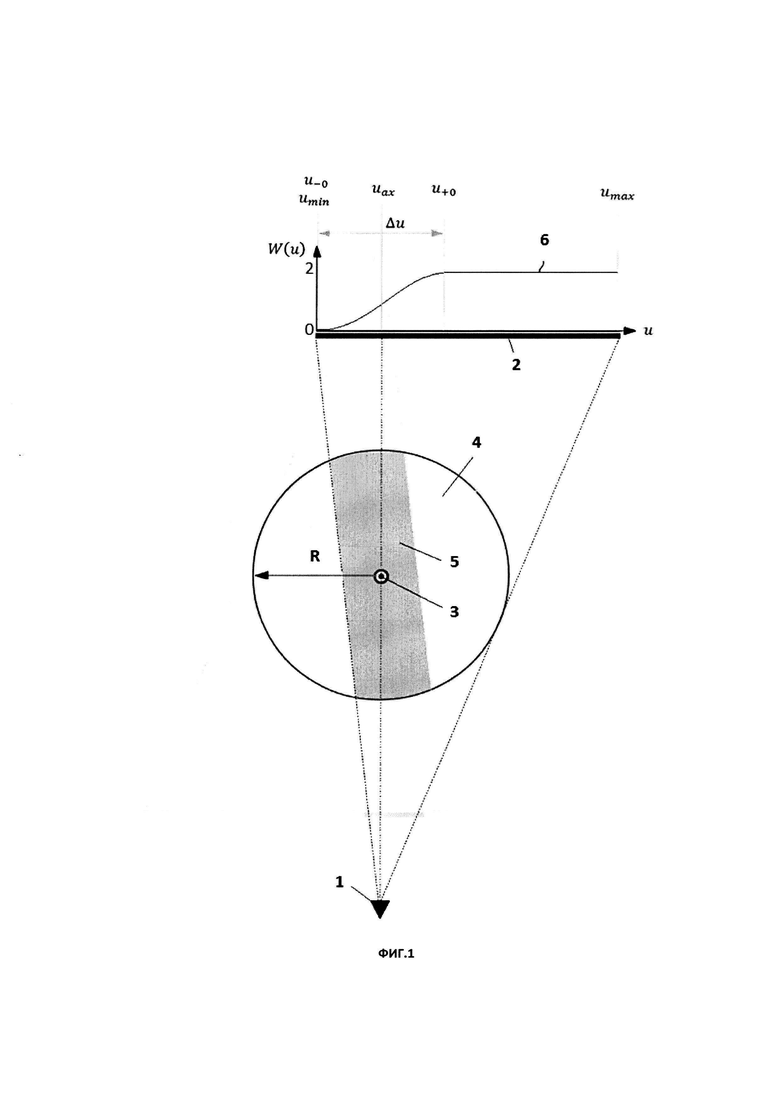
Способ осуществляют следующим образом. Способ реализуется в устройстве конусно-лучевой компьютерной томографической визуализации, которое содержит рентгеновский источник и рентгеночувствительный детектор, расположенные с противоположных сторон относительно оси вращения. Пациент или другой объект, подлежащий обследованию, помещается в области исследования на опоре. Источник излучает рентгеновское излучение, которое пересекает область исследования и регистрируется детектором по мере того, как источник и детектор поворачиваются вокруг оси вращения. Устройство КТ-визуализации, допускающее применение геометрии со смещенным детектором, схематически показанное на ФИГ. 1, содержит рентгеновский источник 1 и рентгеночувствительный детектор 2, который, в некоторых конфигурациях, может быть поперечно смещенным от оси вращения 3 в трансаксиальной плоскости. Упомянутые устройства КТ-визуализации с геометрией со смещенным детектором могут потребоваться вследствие того, что данные устройства обеспечивают увеличение поля обзора 4 или допускают использование детектора меньшего размера и, следовательно, меньшей стоимости.
Реконструируемое изображение с 360-градусным поворотом, со смещенным детектором, является всем телом визуализируемого объекта. Однако усеченные проекционные снимки, получаемые в результате сбора данных с 360-градусным поворотом, при смещенном детекторе, требуют специальных способов реконструкции, из-за неравномерного распределения вкладов проекций в веса вокселов изображения. В области перекрытия 5 на ФИГ. 1, веса для противоположных проекционных снимков равномерны, т.к. информацию для вокселов берут из всех этих снимков, однако, за ее пределами они различаются из-за усечения, и, как следствие, отсутствия части данных.
Заявляемый способ обеспечивает существенное уменьшение артефактов изображений, получаемых в устройстве конусно-лучевой компьютерной томографической визуализации со смещенным относительно центра вращения детектором (далее по тексту - смещенным детектором), и позволяет снизить вычислительные затраты на их устранение.
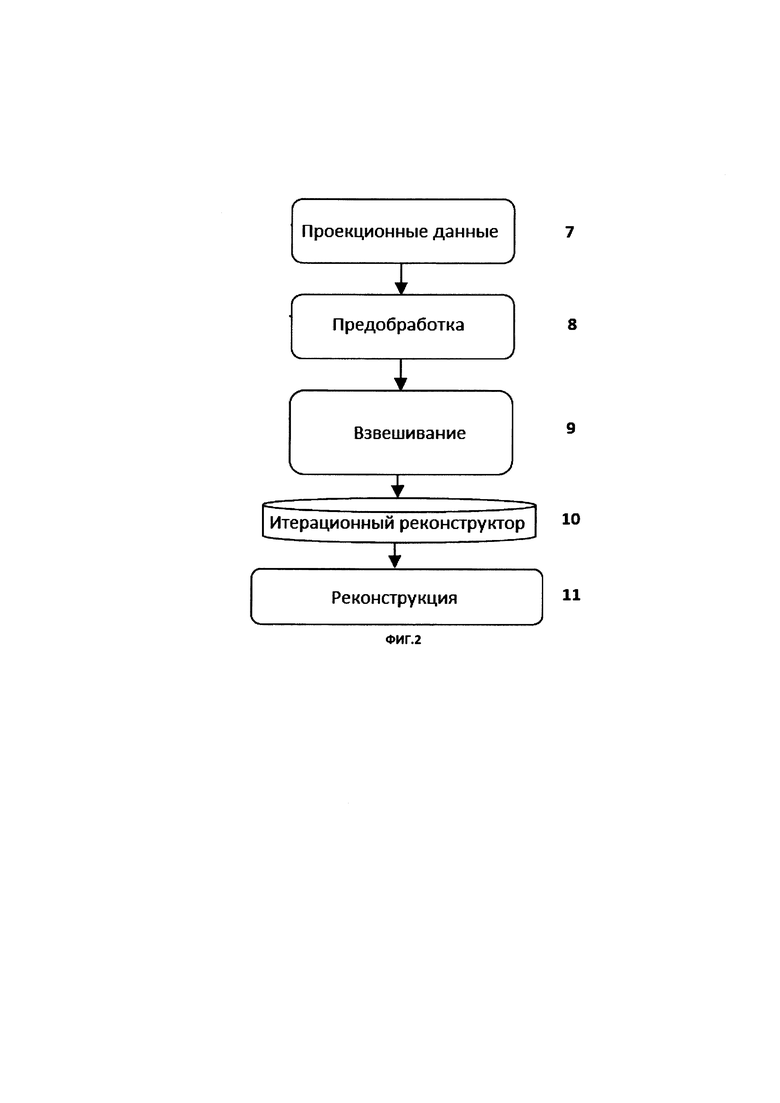
Способ представлен схематически на ФИГ. 2 и включает в себя создание восстановленного изображения из набора проекционных данных 7, полученных во время вращения источника рентгеновского излучения и смещенного детектора.
Восстановление включает в себя предобработку проекционных данных 8, взвешивание проекций 9, и выполнение итерационной реконструкции изображения 10. Предобработка проекционных данных может включать в себя применение калибровок детектора, шумоподавление и преобразование в коэффициенты поглощения (но не ограничиваясь этим).
На этапе взвешивания 9 проекционные данные корректируют на коэффициенты, согласно ФИГ. 1, где показаны:
W - корректирующая функция 6.
Функция W может быть описана различными способами, но должна как минимум выполнять условие: для любого воксела, принадлежащего объему реконструкции изображения, сумма репроецированных коэффициентов функции W должна быть постоянной.
Пример функции W:
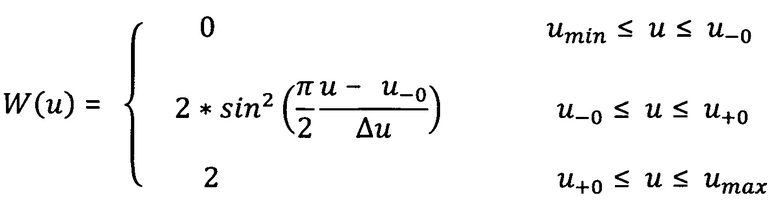
где u - координата детектора по горизонтали (в пикселах).
В частном случае, изображенном на ФИГ. 1, коэффициенты для вычисления функции W определяются следующим образом:
uах - проекция оси на плоскость детектора;
u-0 = umin - начало области коррекции, совпадающее с началом детектора;
u+0 = 2 uах - u-0 - конец области коррекции;
umin, umax - минимально и максимально возможные координаты детектора;
Δu=u+0 - u-0.
Взвешенные проекционные данные передают в итерационный реконструктор, при этом, если в итерационном реконструкторе имеется нормировка на корректирующий объем, учитывающий мощность каждого фактора коррекции, то его применяют с учетом взвешенных проекций, либо заменяют на корректирующий коэффициент, пропорциональный количеству проекций, в зависимости от модели проецирования.
Для примера рассмотрим известную формулу сходимости итерационного алгоритма максимизации ожидания методом максимального правдоподобия (MLEM) (L. Sheep and Y. Vardi, "Maximum likelihood reconstruction for emission tomography," IEEE T.Med. Imaging, vol. MI-l, no. 2, pp. 113-122, October 1982).
В общем виде, для не смещенного детектора, она может выглядеть так:
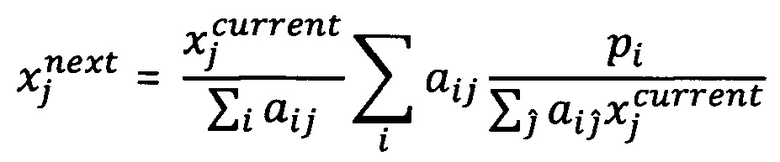
где р - проекционные данные;  - значение воксела xj после (n+1) итераций,
- значение воксела xj после (n+1) итераций,  - значение воксела xj после (n) итераций; Σaij - корректирующий объем в общем случае. Он вычисляется из веса вкладов вокселов в отдельную проекцию Pt (в этом варианте, это обратное проецирование единицы в пространство изображения).
- значение воксела xj после (n) итераций; Σaij - корректирующий объем в общем случае. Он вычисляется из веса вкладов вокселов в отдельную проекцию Pt (в этом варианте, это обратное проецирование единицы в пространство изображения).
В соответствии с предложенным способом, новая формула сходимости для смещенного детектора будет такой:
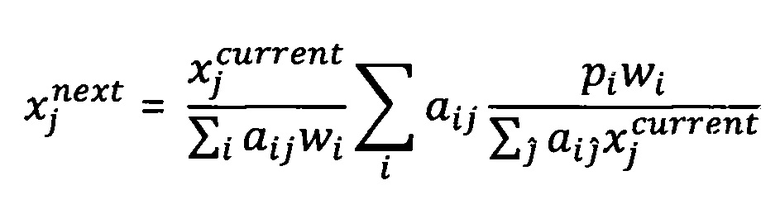
где w - корректирующая функция;
Σi aijwi - корректирующий объем для смещенного детектора, основанный на модели проецирования, учитывающий желательную мощность каждого фактора коррекции изображения.
В определенных моделях проецирования, например, в модели проецирования с линейной интерполяцией методом Джозефа 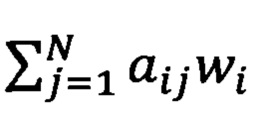 = const для любого воксела в реконструируемом объеме, и тогда объем всех вкладов можно заменить на константу, пропорциональную количеству проекций (Joseph, P.M. (1983). "An improved algorithm for reprojecting rays through pixel images." IEEE Trans Med Imaging 1(3):192-196).
= const для любого воксела в реконструируемом объеме, и тогда объем всех вкладов можно заменить на константу, пропорциональную количеству проекций (Joseph, P.M. (1983). "An improved algorithm for reprojecting rays through pixel images." IEEE Trans Med Imaging 1(3):192-196).
Результатом является восстановленное изображение 11, с практически полным отсутствием артефактов на изображенях, получаемых в устройстве конусно-лучевой компьютерной томографической визуализации со смещенным детектором. Способ позволяет сократить вычислительные затраты на расчет корректирующего объема.
Данный способ можно применить ко всем видам томографии с итерационными алгебраическими реконструкторами и итерационными реконструкторами максимального правдоподобия. Предложенный способ формирования медицинского изображения объекта используют в медицинских устройствах визуализации, содержащих детектор. Способ содержит этап, на котором производится взвешивание проекционных данных, благодаря которому повышается точность реконструкции изображения визуализируемого объекта.
Изобретение относится к медицине. Способ формирования медицинского изображения объекта в устройстве конусно-лучевой компьютерной томографической визуализации включает получение проекционных снимков объекта с помощью детектора, смещенного от центра вращения таким образом, что детектор при движении охватывает по меньшей мере половину ширины визуализируемого объекта, расчет корректирующего объема, реконструкцию изображения итерационным способом из набора взвешенных проекционных данных конусного пучка, полученного во время полного поворота источника рентгеновского излучения и детектора вокруг оси вращения. На проекционных снимках определяют проекцию оси вращения системы источник - детектор, с учетом данных о проекции оси вращения осуществляют взвешивание проекционных данных по крайней мере один раз на этапе подготовки проекционных снимков и рассчитывают корректирующий объем. Технический результат заключается в повышении точности реконструируемого изображения визуализируемого объекта. 2 ил.
Способ формирования медицинского изображения объекта в устройстве конусно-лучевой компьютерной томографической визуализации, включающий получение проекционных снимков объекта с помощью детектора, смещенного от центра вращения таким образом, что детектор при движении охватывает по меньшей мере половину ширины визуализируемого объекта, расчет корректирующего объема, реконструкцию изображения итерационным способом из набора взвешенных проекционных данных конусного пучка, полученного во время полного поворота источника рентгеновского излучения и детектора вокруг оси вращения, отличающийся тем, что на проекционных снимках определяют проекцию оси вращения системы источник - детектор, с учетом данных о проекции оси вращения осуществляют взвешивание проекционных данных по крайней мере один раз на этапе подготовки проекционных снимков и рассчитывают корректирующий объем.
| WO 2010037911A1, 08.04.2010 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ КОМПЬЮТЕРНЫХ ТОМОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ С ИСПОЛЬЗОВАНИЕМ ГЕОМЕТРИЙ СО СМЕЩЕННЫМ ДЕТЕКТОРОМ | 2010 |
|
RU2550542C2 |
| US 7339174B1, 04.03.2008 | |||
| US 2008021671 A1, 24.01.2008. | |||

