Настоящая заявка, в общем, относится к области формирования изображений. В одном варианте осуществления она представляет способ и устройство для формирования изображений больших объектов. В другом варианте осуществления она представляет детектирование и компенсацию артефактов движения при реконструкции томографических изображений. Предмет изобретения заявки находит использование, по меньшей мере, для формирования изображений в компьютерной томографии (CT, КТ) и, более конкретно, для формирования изображений в компьютерной томографии с плоским детектором и коническим лучом (CBCT, КТКЛ), и будет описан, в частности, со ссылкой на нее. Однако он также имеет более общее применение с другими способами формирования изображений и в других областях.
Обычное устройство формирования изображения CT включает в себя источник рентгеновского излучения и детектор, чувствительный к рентгеновскому излучению, расположенные на противоположных сторонах области исследования. Человека - пациента или другой объект, который должен быть исследован, поддерживают в области исследования с помощью соответствующей опоры. Источник излучает рентгеновское излучение, которое пересекает область исследования и детектируется детектором, по мере того как источник и детектор вращаются вокруг центра вращения. Устройство формирования изображения CT, способное обладать смещенной геометрией, включает в себя источник рентгеновского излучения и детектор, чувствительный к рентгеновскому излучению, который, в некоторых конфигурациях, может перемещаться поперечно от центра вращения в трансаксиальной плоскости. Такие устройства формирования изображения CT со смещенной геометрией являются предпочтительными, потому что они обеспечивают увеличенное поле зрения или позволяют использовать детектор с малыми размерами.
Однако существующие устройства формирования изображения CT со смещенной геометрией, могут не адекватно размещать некоторые большие объекты, например, тучного пациента. Частично это связано с тем, что смещения источника рентгеновского излучения и детектора могут ухудшить качество реконструированного изображения. Кроме того, коррекция аттенюации во время реконструкции извлекает выгоду полного анатомического охвата, который может быть невозможным даже при больших смещениях.
Кроме того, качество изображений, полученных с помощью устройств отображения CT, особенно медленно вращающихся устройств формирования изображения CBCT, также часто ухудшается из-за неконтролируемых движений пациента, возникающих, например, при неспособности пациента задержать свое дыхание, кишечных сокращениях, из-за нервной дрожи, естественных циклических движений, сердечного биения, дыхания, или других форм движения. В настоящее время используются итерационные алгоритмические способы компенсации движения для улучшения качества изображения для изображений, которые содержат артефакты движения. В то время как такие способы позволяют улучшить качество изображения для некоторых типов движения, эффекты компенсации движения, достигаемые этими способами, часто неточны, и они также могут ввести артефакты в области изображения, на которые не было оказано воздействие каким-либо движением.
Желательно предоставить способ и устройство, которые обеспечивают большее поле зрения, чем современные устройства формирования изображения CT со смещенной геометрией, и которые ослабляют артефакты, типично возникающие в реконструированных изображениях, полученных из существующих устройств формирования изображения CT с геометриями с большим смещением. Кроме того, также желательно предоставить способ и устройство для детектирования областей изображения, на которые воздействуют артефакты движения при реконструкции томографических изображений и для предоставления оценки движения и компенсации движения, чтобы предотвратить такие артефакты движения в получаемом реконструированном изображении.
Аспекты настоящего изобретения направлены на эти и другие задачи.
В соответствии с одним аспектом настоящего изобретения, предусмотрены способ и устройство для улучшения большого поля зрения при получении изображений CT, используя две процедуры сканирования: (i) одну c центрированными источником излучения и детектором и (ii) другую со смещенным детектором. В соответствии с этим аспектом может быть достигнуто большое поле зрения, которое позволяет размещать большие объекты, чем могут быть размещены в существующих в настоящее время устройствах формирования изображений CT со смещенными геометриями. Кроме того, поскольку при реконструкции изображения используются данные формируемого изображения из обеих процедур сканирования, артефакты, которые типично возникают при реконструкции данных формируемых изображений, полученных с помощью существующих устройств формирования изображения CT с геометриями с большим смещением, можно исключить из-за большого перекрытия между виртуальными детекторами в противоположных направлениях просмотра.
В соответствии с другим аспектом настоящего изобретения предоставлены способ и устройство для детектирования и компенсации артефактов движения при реконструкции томографических изображений. В соответствии с этим аспектом предоставлены способ и устройство для создания карты движения. Карта движения используется для указания, какие области изображения могут быть повреждены артефактами движения и/или для компенсации движения, чтобы не допускать артефакты движения в реконструированном томографическом изображении.
Другие дополнительные аспекты настоящего изобретения будут понятны для специалиста в данной области техники после чтения и понимания следующего подробного описания. Многочисленные дополнительные преимущества и выгоды будут очевидными для специалиста в данной области техники после чтения следующего подробного описания предпочтительных вариантов осуществления.
Изобретение может быть представлено в форме различных компонентов и компоновок компонентов и в различных операциях обработки и компоновках операций обработки.
Чертежи представлены только с целью иллюстрации предпочтительных вариантов осуществления и не должны рассматриваться как ограничение изобретения.
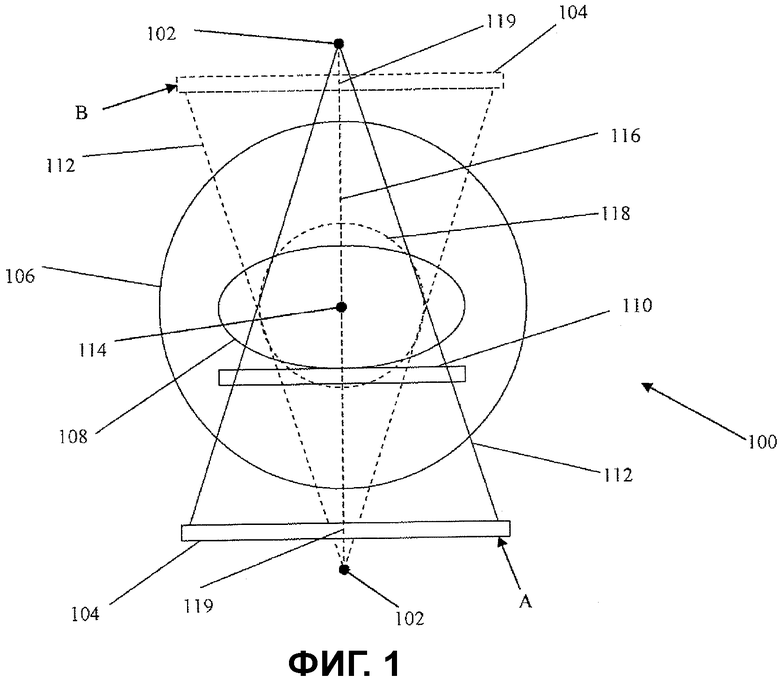
На фиг.1 показан трансаксиальный вид центрированной геометрии получения CT в соответствии с вариантом осуществления изобретения;
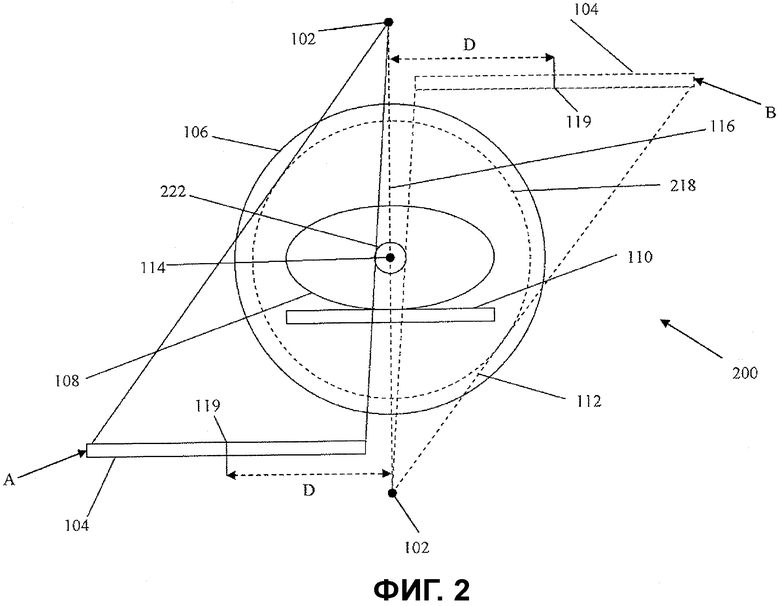
на фиг.2 показан трансаксиальный вид геометрии со смещением получения CT в соответствии с вариантом осуществления изобретения;
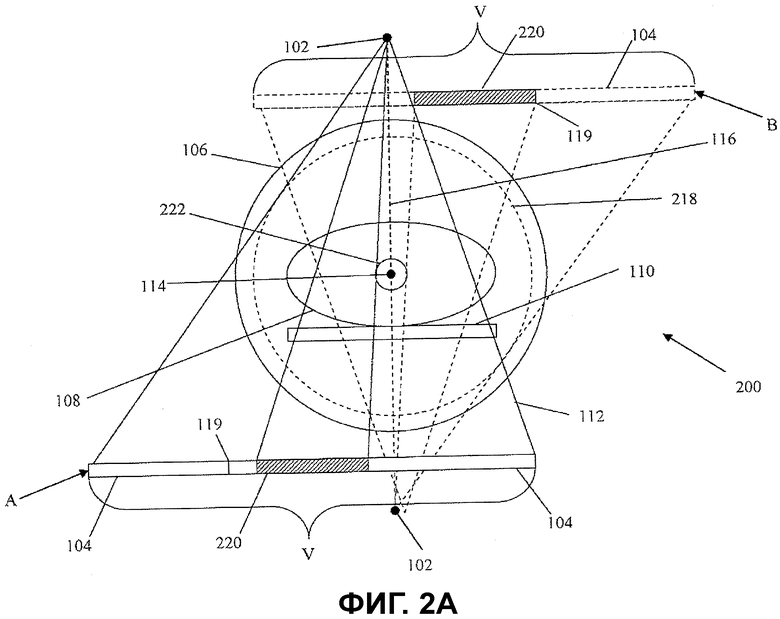
на фиг.2A показан трансаксиальный вид виртуального детектора, полученного в результате объединения данных, собранных из центрированной геометрии по фиг.1 и из геометрии со смещением по фиг.2;
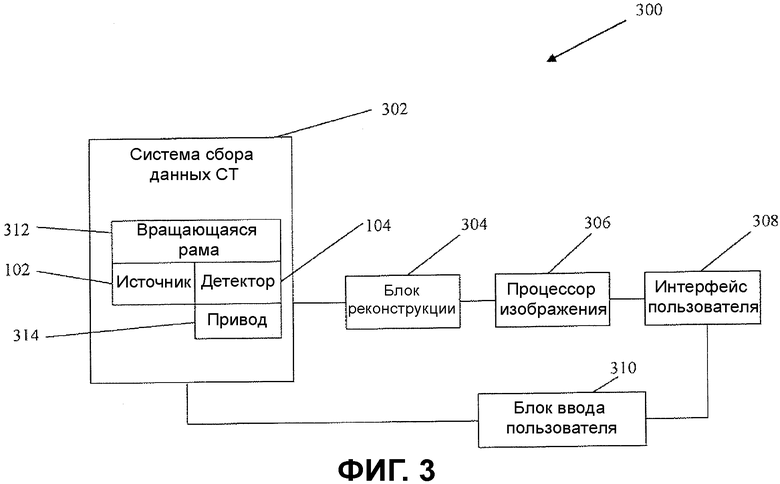
на фиг.3 показана система формирования изображений в соответствии с вариантом осуществления изобретения; и
на фиг.4 представлен способ формирования изображений в соответствии с вариантом осуществления изобретения;
на фиг.5 представлен способ детектирования движения в соответствии с вариантом осуществления изобретения;
на фиг.6A и 6B представлены дополнительные способы для улучшения карты движения в соответствии с вариантом осуществления настоящего изобретения;
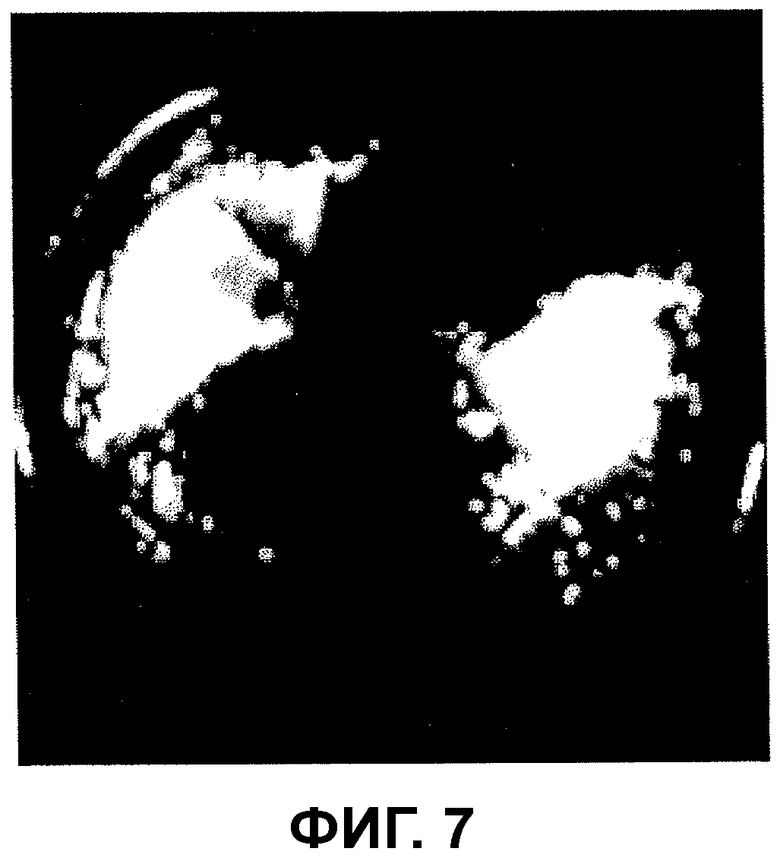
на фиг.7 показано примерное изображение, генерируемое программным обеспечением, представляющим карту движения, в соответствии с вариантом осуществления настоящего изобретения;
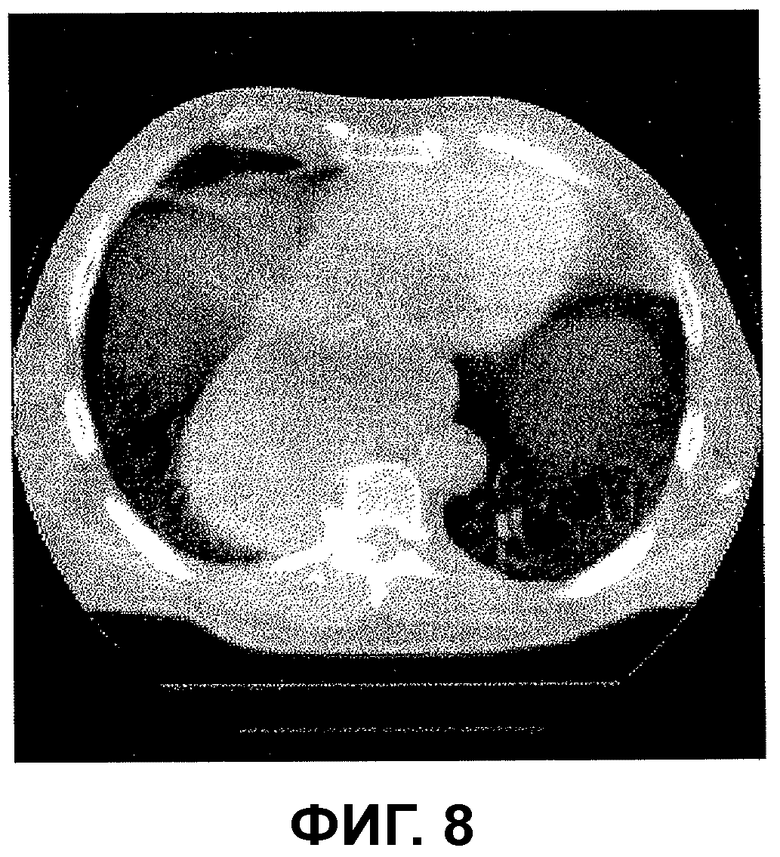
на фиг.8 показано примерное изображение, генерируемое программным обеспечением, представляющим поврежденное движением реконструированное изображение, без какой-либо коррекции движения;
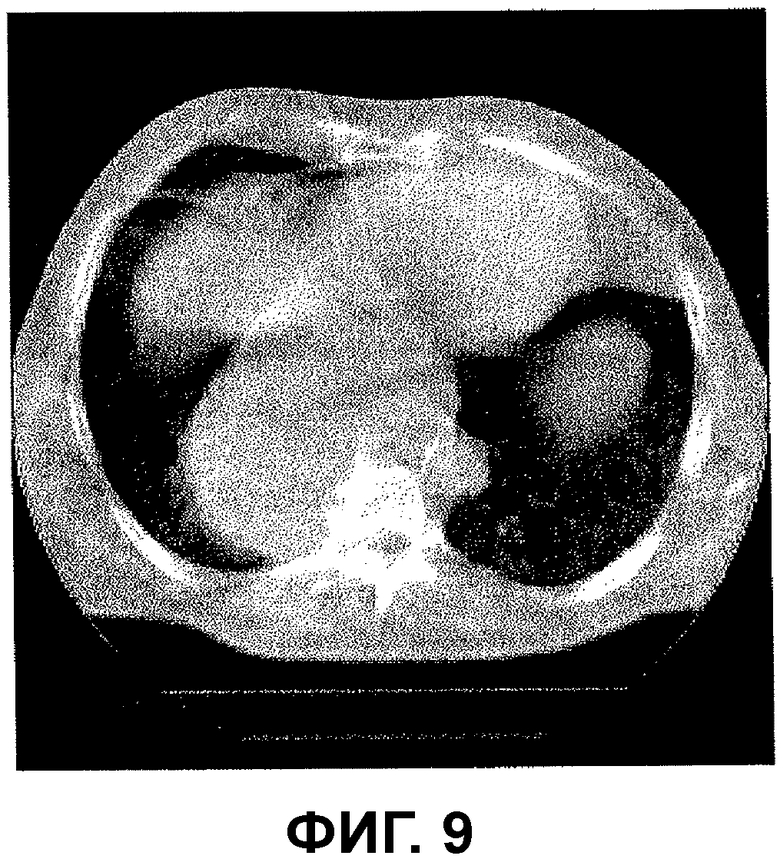
на фиг.9 показано примерное изображение, генерируемое программным обеспечением, представляющим реконструированное изображение по фиг.8 после глобальной коррекции движения; и
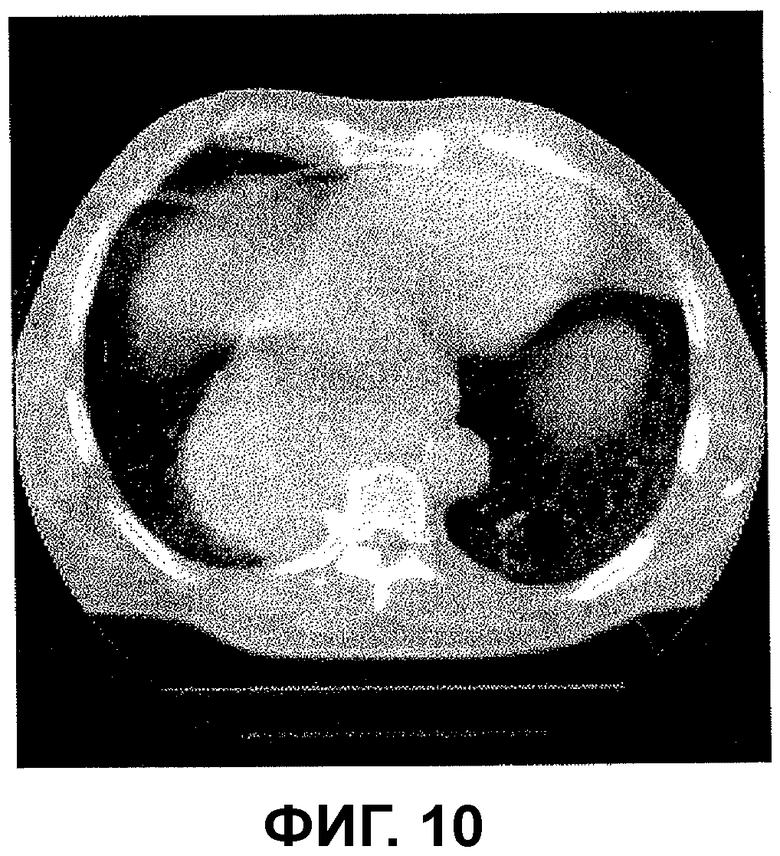
на фиг.10 показано примерное изображение, генерируемое программным обеспечением, представляющим реконструированное изображение по фиг.8 после локальной коррекции движения.
Один аспект настоящего изобретения, в общем, направлен на способ и устройство для получения изображений CT, и более конкретно, на способ и устройство для обеспечения большого поля зрения ("FOV") с улучшенным качеством изображения при использовании по меньшей мере двух процедур сканирования, сделанных устройством формирования изображения CT. По меньшей мере одно сканирование получают, используя источник излучения и детектор устройства формирования изображения CT с центрированной геометрией, и, по меньшей мере, одно сканирование получают с помощью детектора и/или источника в геометрии со смещением. Данные изображения, полученные, по меньшей мере, из двух процедур сканирования, затем объединяют, чтобы сформировать реконструированное изображение.
На фиг.1 представлена примерная центрированная геометрия 100 для устройства формирования изображения CT. В примерной центрированной геометрии 100 есть источник 102 рентгеновского излучения, такой как рентгеновская трубка, и детектор 104, чувствительный к рентгеновскому излучению, такой как плоская детекторная решетка области панели, продолжающаяся в поперечном и осевом направлениях. Как показано на фиг.1, центр 114 вращения может также служить центром поперечного поля зрения (FOV, ПЗ) 118. Однако центр 114 вращения не обязательно всегда выровнен с центром поперечного FOV 118 в каждом применении. Как представлено, опора 110 объекта поддерживает объект 108 при исследовании в области 106 исследований. Центральный луч или проекция 116 из пучка 112 рентгеновских лучей перпендикулярен центру 119 детектора, который выровнен с центром 114 вращения.
Источник 102 рентгеновского излучения и детектор 104, чувствительный к рентгеновскому излучению, вращаются вокруг центра 114 вращения. Источник 102 и детектор 104, в общем, установлены на вращающейся раме (не показана) для вращения вокруг области 106 исследований. В некоторых вариантах осуществления, однако, источник 102 и детектор 104 могут оставаться в постоянном угловом положении, в то время как объект 108 перемещается и/или вращается, для получения требуемой угловой выборки. В то время как фигуры и описание фокусируются на использовании детекторов с плоской панелью, также могут использоваться дугообразные детекторы или детекторы, имеющие другие формы. Кроме того, в то время как чертежи и описание фокусируются на системе CT, в которой источник 102 является точечным источником, рассматриваются также другие альтернативы. Например, источник 102 может быть линейным источником. Источники гамма-излучения и другие, также могут использоваться. Также может быть предоставлено множество источников 102 и детекторов 104, в этом случае соответствующие наборы источников и детекторов могут быть смещены по углу и/или продольно друг от друга.
На фиг.1, источник 102 рентгеновского излучения и детектор 104 в примерной центрированной геометрии 100 представлены в двух противоположных положениях в трансаксиальной плоскости, положение А представлено сплошными линиями, и положение B показано пунктирными линиями. В положении B источник 102 рентгеновского излучения и детектор 104 повернуты на 180 градусов вокруг центра 114 вращения от положения А. Как источник 102 рентгеновского излучения, так и детектор 104 из примерной центрированной геометрии 100 центрированы относительно центра 114 вращения, при этом центральный луч 116 пучка 112 рентгеновских лучей и центр 119 детектора выровнены с центром 114 вращения, когда источник 102 рентгеновского излучения и детектор 104 находятся как в положении А, так и в положении B.
На фиг.2 представлена примерная геометрия 200 со смещением для устройства формирования изображения. Центр 119 детектора 104 в примерной геометрии 200 со смещением перемещен поперечно или смещен от центра 114 вращения в трансаксиальной плоскости на расстояние D. Как описано выше, в связи с центрированной геометрией 100 источник 102 рентгеновского излучения и детектор 104, чувствительный к рентгеновскому излучению, в геометрии 200 со смещением вращаются вокруг центра 114 вращения. На фиг.2 источник 102 рентгеновского излучения и детектор 104 в примерной геометрии 200 со смещением представлены в двух противоположных положениях в трансаксиальной плоскости, положении А, показанном сплошными линиями, и в положении B, показанном пунктирными линиями. В положении B источник 102 рентгеновского излучения и детектор 104 повернуты на 180 градусов вокруг центра вращения 140 от положения А. Как показано на фиг.2, центр 119 детектора смещен от центра 114 вращения в трансаксиальной плоскости на расстояние D, как в положении А, так и в положении B.
Поперечное FOV 218 в геометрии 200 со смещением больше, чем поперечное FOV 118 в центрированной геометрии 100. Центр 119 детектора может быть смещен от центра 114 вращения в трансаксиальной плоскости на другие расстояния в других вариантах осуществления настоящего изобретения при изменении расстояния D. Например, центр 114 детектора может быть смещен от центра вращения 119 на расстояние D от 0 до 35 сантиметров или больше. Расстояние D может приближаться к, или даже превышать поперечную полуширину детектора, так, чтобы образовалось "отверстие" 222 в центре поперечного FOV 218. Расстояние D может изменяться множеством способов для подгонки размера поперечного FOV 218. Детектор 104 может быть сдвинут для изменения размера поперечного FOV 118 любым соответствующим средством. Например, детектор 104 может быть перемещен в различных направлениях относительно вращающейся рамы и центра 114 вращения либо вручную человеком - пользователем, либо посредством механического привода. Он может перемещаться линейно, что является предпочтительным для детектора с плоской панелью, или с поворотом, что является предпочтительным для изогнутого детектора. В то время как описанная примерная геометрия 200 со смещением включает в себя центрированный источник и детектор смещения, следует понимать, что можно рассмотреть дополнительные геометрии устройства формирования изображения CT, которые включают в себя источник смещения или источник смещения и детектор смещения.
На фиг.2A представлено перекрытие примерной центрированной геометрии 100 и примерной геометрии 200 со смещением. На фиг.2A источник 102 рентгеновского излучения и детектор 104 из примерной центрированной геометрии 100 и примерной геометрии 200 со смещением перекрывают друг друга в двух противоположных положениях в трансаксиальной плоскости, в положении А, показанном сплошными линиями, и положении B, показанном пунктирными линиями. Область детектора 104 для примерной центрированной геометрии 100 в положении А, которое перекрывается детектором 104 примерной геометрии 200 со смещением в положении А, обозначена заштрихованным участком 220 на фиг.2A. Аналогично также существует область 220 перекрытия между детектором 104 примерной центрированной геометрии 100 в положении B и детектором 104 примерной геометрии 200 со смещением в положении B. Во время реконструкции изображения данные проекции, полученные от примерной центрированной геометрии 100 и примерной геометрии 200 со смещением, могут быть объединены вместе, как будто они были измерены одиночным большим виртуальным детектором V. Это может быть выполнено, например, с использованием затухающего взвешивания и/или усреднения данных проекции, полученных в области 220 перекрытия. В дополнительных вариантах осуществления данные проекции возможно могут не быть получены из центрированной геометрии и геометрии со смещением, но вместо этого данные проекции возможно могут быть получены из двух других смещенных геометрий. Например, данные проекции могут быть получены в результате сканирования, сделанного со смещением центра 114 детектора от центра вращения 119 на первое расстояние D, и второй набор данных проекции может быть получен в результате другого сканирования, сделанного со смещением центра 114 детектора от центра 119 вращения на второе расстояние D.
На фиг.3 представлена система 300 формирования изображений CT, подходящая для использования с примерной центрированной геометрией 100 и геометрией 200 со смещением, описанными выше. Система 300 формирования изображений CT включает в себя систему 302 сбора данных CT, блок 304 реконструкции, процессор 306 изображения, интерфейс 308 пользователя, и блок 310 ввода пользователя. Система 302 сбора данных CT включает в себя источник 102 и детектор 104, которые установлены на вращающейся раме 312 для вращения вокруг области исследования. При этом возможны круговые или другие угловые диапазоны выборки, а также осевые, спиральные, круговые и линейные, в форме седла или другие желательные траектории сканирования. Вариант осуществления системы 300 формирования изображений CT, поясняемый на фиг.3, включает в себя привод 318, такой как микрошаговый двигатель, который обеспечивает необходимое усилие, требуемое для перемещения источника 102 и/или детектора 104.
Блок 304 реконструкции реконструирует данные, генерируемые системой 302 сбора данных, используя методы реконструкции для генерирования объемных данных, показательных для экспонированного субъекта. Методы реконструкции включают в себя аналитические методы, такие как фильтрованная задняя проекция, а также итерационные методы. Процессор 306 изображения обрабатывает объемные данные, требуемые, например, для отображения в желательном виде в интерфейсе 308 пользователя, который может включать в себя одно или более устройств вывода, таких как монитор и принтер, и одно или более устройств ввода, таких как клавиатура и мышь.
Интерфейс 308 пользователя, который предпочтительно осуществляется, используя программные инструкции, выполняемые универсальным или другим компьютером, для предоставления графического интерфейса пользователя ("GUI", ГИП), обеспечивает для пользователя возможность управлять или иначе взаимодействовать с системой 300 формирования изображений, например, при выборе желательной конфигурации или размерности FOV, при инициализации и/или при завершении сканирований, при выборе желательных протоколов сканирования или реконструкции, при управлении объемными данными и т.п.
Блок 310 ввода пользователя, функционально связанный с интерфейсом 308 пользователя, управляет операциями системы 302 сбора данных CT, например, для выполнения желательного протокола сканирования, в случае необходимости, установки положения детектора 104 и/или источника 102, чтобы обеспечить желаемое FOV, и т.п.
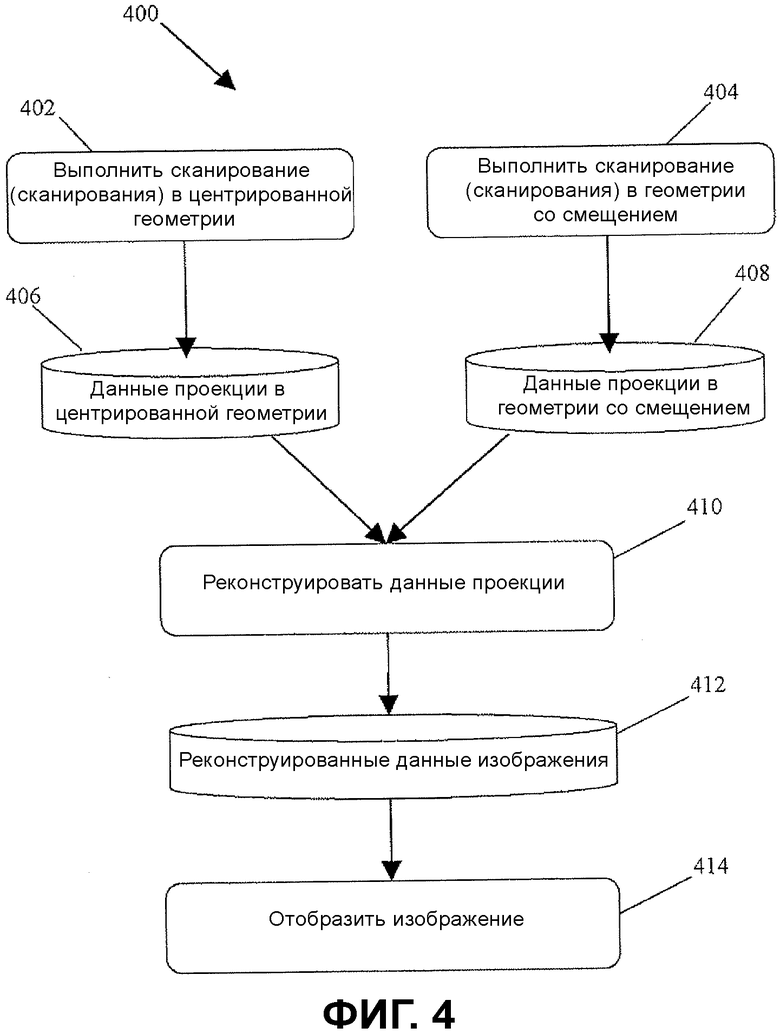
Примерный процесс 400 формирования изображения в соответствии с одним из аспектов настоящего изобретения иллюстрируется на фиг.4. На этапе 402 система 300 формирования изображений CT используется, чтобы сделать по меньшей мере одно сканирование экспонированного субъекта источником 102 и детектором 104 в центрированной геометрии 100, чтобы получить данные проекции в достаточном множестве угловых положений в области 106 исследований. На этапе 404, по меньшей мере, одно сканирование делают в системе 300 формирования изображений CT источником 102 и детектором 104 в геометрии 200 со смещением. Порядок выполнения этапов 402 и 404 может быть обратный, поскольку первое сканирование (сканирования) может быть сделано системой 300 формирования изображений CT в геометрии 200 со смещением с последующим сканированием (сканированиями) системой 300 формирования изображений CT в центрированной геометрии 100. Как описано выше, детектор 104 и/или источник 102 в геометрии 200 со смещением могут быть смещены на разные расстояния D от центра 114 вращения в трансаксиальной плоскости. В дополнительных вариантах осуществления одна или больше процедур сканирования могут быть выполнены детектором 104 и/или источником 102, смещенными от центра 114 вращения в трансаксиальной плоскости на разные расстояния D при каждом сканировании.
Как показано на фиг.4, данные 406 проекции в центрированной геометрии получают из сканирования (сканирований) на этапе 402 в центрированной геометрии, и данные 408 проекции в геометрии со смещением получают из сканирования (сканирований) на этапе 404 в геометрии со смещением. Блок 304 реконструкции реконструирует данные 406 проекции в центрированной геометрии и данные 408 проекции в геометрии со смещением на этапе 410, используя известные методы реконструкции, используемые в настоящее время в связи с устройствами формирования изображений CT в геометрии со смещением для генерирования объемных данных, показательных для экспонированного субъекта 108, то есть реконструированных данных 412 изображения. Во время реконструкции данные 406 проекции в центрированной геометрии и данные 408 проекции в геометрии со смещением соединяют вместе попарно, используя область перекрытия между данными 406 и 408 проекции полученную из области 220 перекрытия детектора 104 для регистрации данных 406 и 408 проекции друг с другом. Затухающее взвешивание и/или усреднение могут быть, в случае необходимости, применены в областях перекрытия данных 406 проекции в центрированной геометрии и данных 408 проекции в геометрии со смещением во время обработки реконструкции. Комбинированная реконструкция данных 406 и 408 проекции эмулирует одиночное сканирование с большим виртуальным детектором V, иллюстрированным на фиг.2A.
Данные 412 реконструированного изображения, полученные на этапе 410, обрабатываются процессором 306 изображения. Полученное в результате реконструированное изображение отображают в интерфейсе 308 пользователя на этапе 414.
Существующие устройства формирования изображения CT в геометрии со смещением часто имеют проблемы качества изображения из-за ограниченной избыточности данных между противоположными направлениями просмотра, особенно в случае большого смещения детектора. Недостаточная избыточность может заметно ухудшить качество изображения во время реконструкции. Такие эффекты, ухудшающие изображения, с которыми сталкиваются существующие устройства формирования изображения CT, в которых используется геометрия со смещением, в значительной степени исключаются с помощью устройства и способа, раскрытыми здесь, потому что может быть достигнуто еще большее поле зрения, в то время как, тем не менее, гарантируется существенная избыточность между противоположными виртуальными увеличенными видами. В частности, "перекрытие" противоположных виртуальных увеличенных видов до половины фактической ширины детектора может легко быть достигнуто, сводя к минимуму вероятность возникновения и влияние артефактов, появляющихся в результате аппроксимаций, сделанных при реконструкции для смещенной от центра геометрии.
Тот факт, что способ получения изображений, раскрытый здесь, подразумевает использование, по меньшей мере, двух операций сканирования, предоставляет некоторую свободу при распределении дозы излучения во время процедур сканирования. Разные уровни дозы излучения могут быть ассоциированы с каждым сканированием (сканированиями) на этапах 404 и 402, по желанию оператора устройства 300 формирования изображения CT. Например, сканирование (сканирования) в геометрии со смещением на этапе 404 может быть выполнено с возможностью выдачи меньше половины дозы излучения, которая используется при сканировании (сканированиях) в центрированной геометрии на этапе 402. Такие методы дозирования позволяют получить лучшее отношение контраста к шумам, чем получаемое при сканировании (сканированиях) в центрированной геометрии на этапе 402. В то же время, области границы экспонированного субъекта, сканированного при сканировании (сканированиях) в геометрии со смещением на этапе 404, которые менее значимы для медицинского диагноза, но полезны для коррекции аттенюации, будут подвергаться относительно меньшей дозе излучения. Таким образом, доза излучения, выдаваемая пациенту во время процедур сканирования на этапах 402 и 404, может быть приспособлена, в общем эквивалентной или меньше, чем доза излучения, выдаваемая пациенту во время однократного сканирования с широким детектором, таким как используются при спиральном формировании изображений CT.
Другой аспект настоящего изобретения, в общем, направлен на способ и устройство для детектирования, оценки и/или компенсации артефактов движения, которые возникают при реконструкции томографических изображений. В соответствии с этим аспектом предоставлены способ и устройство для генерирования карты движения. Карта движения используется для указания, какие области изображения могут быть повреждены артефактами движения и/или для оценки движения и компенсации движения, чтобы предотвратить или уменьшить артефакты движения в реконструированном томографическом изображении.
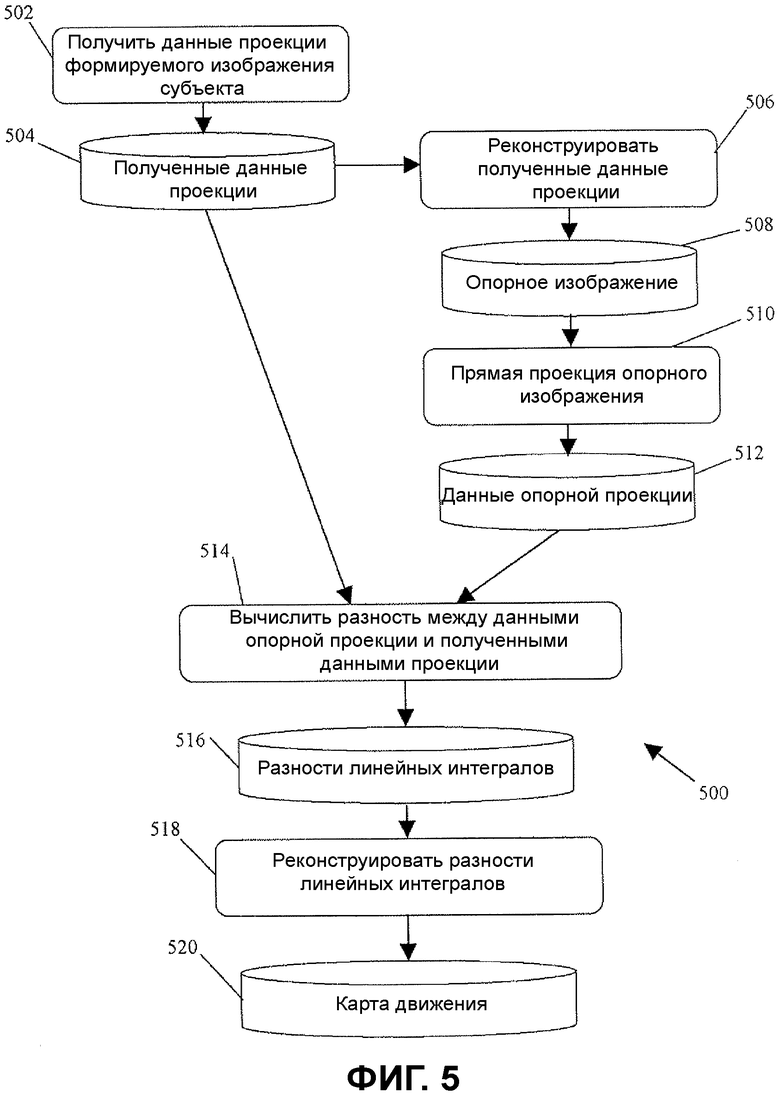
Примерный способ 500 детектирования движения в реконструированных томографических изображениях в соответствии с одним аспектом настоящего изобретения иллюстрируется на фиг.5. На этапе 502 система 300 формирования изображений CT используется, чтобы получить набор полученных данных 504 проецирования экспонированного субъекта 108. На этапе 506 к этим полученным данным 504 проецирования применяют томографическую реконструкцию, используя известные методы реконструкции, такие как фильтрованная задняя проекция (FBP), для генерирования реконструированного изображения (то есть, "опорного" изображения) 508. Опорное изображение 508 может содержать артефакты в результате движения объекта во время процесса сканирования. На этапе 510, известные методы прямого проецирования применяют к ранее реконструированному опорному изображению 508, чтобы вывести опорные данные 512 проекции. Хотя вычисление опорных данных проекции, используя прямое проецирование реконструированного изображения, представляет собой обычный аспект итерационной реконструкции изображения, для специалистов в данной области техники будет понятно, что точность интерполяций пространства изображения и возможное усечение проекций представляют собой две важные потенциальные проблемы, которые, возможно, потребуется устранить во время такой обработки. Кроме того, если опорное изображение 508 реконструируют, используя классический алгоритм Фельдкампа-Девиса-Кресса (FDK), конические артефакты луча могут повредить опорные проекции и, следовательно, должны быть учтены.
Затем на этапе 514 вычисляют разности 516 линейных интегралов между полученными данными 504 проекции и опорными данными 512 проекции. Любые такие разности, вероятно, получаются из-за артефактов, вызванных движением объекта во время сканирования 502 для формирования изображения. Разности 516 линейных интегралов между полученными данными 504 проекции и опорными данными 512 проекции вычисляют независимо для каждой пары соответствующих проекций из полученных данных 504 проекции и опорных данных 512 проекции. Этап коррекции данных можно, в случае необходимости, применять на этом этапе используя, например, состояния Хельгасона-Людвига или другие аналогичные меры для коррекции данных, чтобы корректировать любые противоречия в данных. Разности 516 линейных интегралов представляют изоляцию движения, которое произошло во время процедуры 502 сканирования в пространстве проекции.
В этапе 518 томографическую реконструкцию применяют к абсолютным значениям разностей 516 линейных интегралов, используя известные методы реконструкции, как, например, фильтрованная задняя проекция (FBP). Полученное в результате генерируемое изображение является картой 520 движения, которая представляет области изображения 508, поврежденные движением, которое произошло во время процедуры 502 сканирования. Таким образом, карта 520 движения представляет изоляцию движения, которое произошло во время процедуры 502 сканирования в пространстве изображения. Карта 520 движения может быть выполнена как бинарная карта движения, на которой просто указано, существует ли движение в данном вокселе изображения. В качестве альтернативы улучшенная карта 520 движения может указывать амплитуду движения, которое существует в любом данном вокселе изображения. Примерная карта 520 движения иллюстрирована на фиг.7. Для специалистов в данной области техники будет понятно, что примерный способ 500 генерирования карты 520 движения может представлять собой итеративный процесс в дополнительных вариантах осуществления.
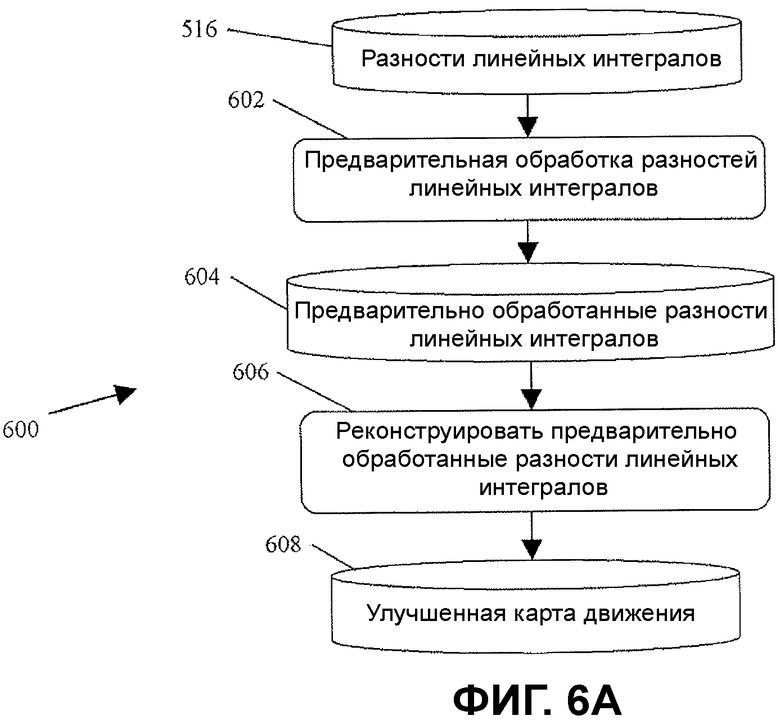
Необязательный примерный способ 600 улучшения карты 520 движения в соответствии с вариантом осуществления настоящего изобретения иллюстрируется на фиг.6A. На этапе 602, разности 516 линейных интегралов могут быть обработаны или улучшены, используя, например, ограничение окном, нормализацию, или фильтрование, чтобы сформировать предварительно обработанные разности линейных интегралов 604. Улучшение путем ограничения окном представляет собой нелинейное преобразование входных значений на модифицируемые выходные значения, где входные значения ниже заданного минимального значения и выше заданного максимального значения игнорируют или устанавливают в нуль. Как специальная форма ограничения окном может быть применена пороговая обработка, где входные значения ниже данного порога устанавливаются в нуль, и значения, превышающие порог, устанавливают в единицу. Другим видом улучшения является нормализация, при которой разности линейных интегралов обращают в значения между 0 и 1 для стандартизации и упрощения последовательных математических вычислений. Еще один вид улучшения состоит в применении объемного медианного фильтра, гауссова размывания или некоторой другой обработки фильтрования. В одном примерном варианте осуществления размер окружения для объемного медианного фильтра и размер ядра свертки для гауссова размывания устанавливаются как 3×3×3. Улучшение при предварительной обработке 602 может также вовлекать другие виды обработки изображения в дополнительных вариантах осуществления.
Предварительно обработанные разности линейных интегралов 604 реконструируют, используя известные методы реконструкции, как, например, фильтрованная задняя проекция (FBP, ФЗП), на этапе 606. Полученное в результате генерируемое изображение, представляет собой улучшенную карту 608 движения, которая была ограничена окном, нормализована, отфильтрована или иначе улучшена. Улучшенная карта 608 движения может быть выполнена либо как двоичная карта движения, которая просто указывает, существует ли движение в данном вокселе изображения, или улучшенная карта 608 движения может указывать амплитуду движения, которое присутствует в любом данном вокселе изображения.
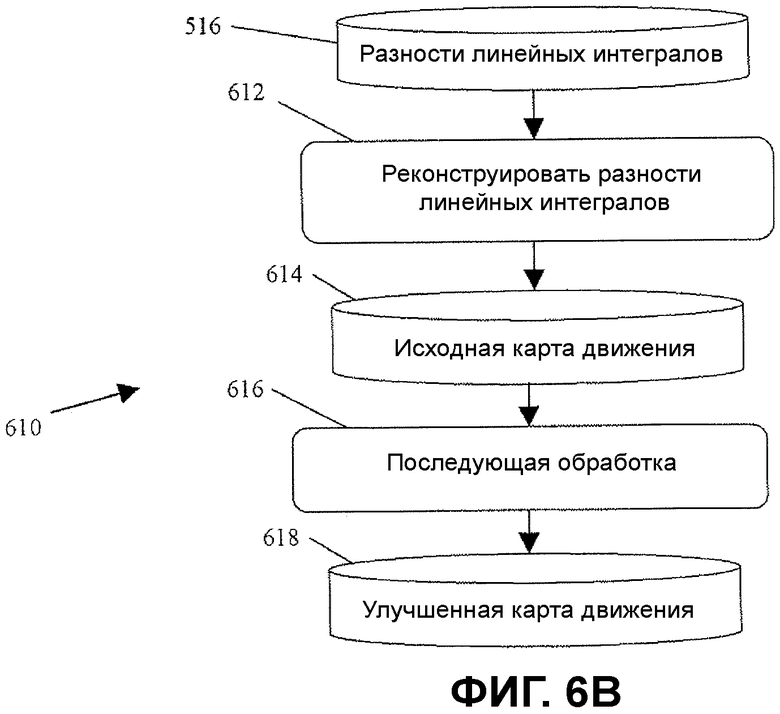
Другой необязательный примерный способ 610 улучшения карты 520 движения в соответствии с вариантом осуществления настоящего изобретения, иллюстрированного на фиг.6B. На этапе 612 реконструируют разности 516 линейных интегралов, используя известные методы реконструкции, как фильтрованная задняя проекция (FBP). Полученное в результате сгенерированное изображение представляет собой исходную карту 614 движения. Исходную карту 614 движения затем обрабатывают или улучшают в этапе 616, используя, например, ограничение окном, нормализацию, фильтрование для формирования улучшенной 618 карты движения после обработки. Например, в одном примерном варианте осуществления исходную карту 614 движения подвергают установке пороговой обработке по 150 единицам Хаунсфилда (HU, ЕХ). Такая обработка или улучшение карты 614 движения используется, чтобы удалить "шумы реконструкции" или другие несоответствия в данных и избежать образования штрихов.
Карта движения, такая как карта 520, 608 или 618 движения, имеет множество вариантов использования. Например, карта движения может использоваться как эталонная карта радиологом или другим специалистом, выполняющим процесс формирования изображения, для указания, какие воксели конкретного реконструированного изображения могут потенциально содержать артефакты реконструкции из-за движения, например, области изображения с потенциальными артефактами движения, которые делают их непригодными для диагноза или локализации. Таким образом, карта движения служит индикатором надежности, который используется вместе с реконструированным изображением, поскольку она предоставляет информацию о местоположении движения во время сканирования, присутствующего в реконструированном изображении.
Кроме того, карта движения может быть объединена со схемой оценки и компенсации движения, чтобы применить локальную коррекцию движения во время реконструкции изображения. Обычные методы глобальной компенсации движения применяются универсально ко всему изображению во время обработки реконструкции. Это может привести к возникновению артефактов в областях реконструированного изображения, которые не связаны каким-либо движением. В результате на практике эти способы глобальной компенсации движения могут повредить статические области реконструированных изображений артефактами, возникшими из-за неправильной компенсации движения.
Однако использование карты движения вместе с локальной коррекцией движения предотвращает применение компенсации движения в статических областях, где не возникло движения во время процедуры сканирования. Это может предотвратить артефакты в таких статических областях. Например, карта движения может использоваться как "карта смешения" с применением метода коррекции движения только в тех зонах, которые обозначены как области, в которых было движение, на основе карты движения. Кроме того, карта движения также может использоваться как "карта взвешивания". При таком подходе карта движения могла бы использоваться для определения "взвешенной" величины коррекции движения, которую можно применять к любому данному вокселю изображения, который представлял бы собой скорректированное значение между применяемой нулевой коррекцией движения и, самое большее, величиной коррекции движения, которая применялась бы текущими обычными методами глобальной коррекции движения. Дополнительные варианты использования и применения карты движения будут понятны для специалистов в данной области техники. Для дополнительной иллюстрации описанных здесь методов применения компенсации движения примерное поврежденное движением изображение, генерируемое программным обеспечением, иллюстрировано на фиг.8. На фиг.9 представлена реконструкция изображения по фиг.8, которая претерпела глобальную коррекцию движения. На фиг.10 представлена реконструкция изображения по фиг.8, которая претерпела локальную коррекцию движения, используя карту движения.
Вышеупомянутые функции, такие как, например, выбор желательной конфигурации или размера FOV, инициализация и/или прекращение сканирования, выбор желательных протоколов сканирования или реконструкции, манипуляции с объемными данными и т.п., могут быть выполнены как программная логика. Термин "логика", используемый здесь, включает в себя, но не ограничивается этим, аппаратные средства, встроенное программное обеспечение, программное обеспечение и/или комбинации каждого из них для выполнения функции (функций) или действия (действий), и/или вызова функции или действия другим компонентом. Например, на основе желательного применения или потребности логика может включать в себя микропроцессор, управляемый программным обеспечением, дискретную логику, такую как специализированная интегральная схема (ASIC), или другое запрограммированное логическое устройство. Логика может также быть полностью воплощена как программное обеспечение.
Термин "программное обеспечение," используемый здесь, включает в себя, но не ограничивается этим, одну или больше считываемые и/или выполняемые компьютерами инструкции, которые вызывают выполнение компьютером или другим электронным устройством желательных функций, действий и/или поведения. Инструкции могут быть воплощены в различных формах, таких как процедуры, алгоритмы, модули или программы, включая в себя отдельные приложения или код из динамически связанных библиотек. Программное обеспечение также может быть выполнено в различных формах, таких как автономная программа, вызов функции, сервлет, апплет, инструкции, хранящиеся в памяти, часть операционной системы или исполняемые инструкции другого типа. Для специалиста в данной области техники будет понятно, что форма программного обеспечения зависит от, например, требования желательного приложения, среды, в которой оно работает, и/или желаний конструктора/программиста или тому подобное.
Системы и способы, описанные здесь, могут быть осуществлены на различных платформах, включая в себя, например, сетевые системы управления и автономные системы управления. Кроме того, логика, базы данных или таблицы, показанные и описанные здесь, предпочтительно, постоянно находятся в или на считываемом компьютером носителе, таком как компонент системы 300 формирования изображений. Примеры другого считываемого компьютером носителя включают в себя запоминающее устройство типа флэш, постоянное запоминающее устройство (ROM, ПЗУ), оперативное запоминающее устройство (RAM, ОЗУ), программируемое постоянное запоминающее устройство (PROM, ППЗУ), электрически программируемое ПЗУ (EPROM, ЭППЗУ), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM, ЭСППЗУ), магнитный диск или ленту, оптически считываемые носители, включающие в себя CD-ROM и DVD-ROM, и другие. Также, кроме того, процессы и логика, описанные здесь, могут быть объединены в один большой поток обработки или разделены на множество потоков вспомогательной обработки. Порядок, в котором здесь были описаны потоки обработки, не важен и может быть перестроен, при все еще достижении тех же самых результатов. Действительно, потоки обработки, описанные здесь, могут быть перестроены, объединены и/или реорганизованы в их вариантах выполнения, в соответствии с их обоснованием или требованиями.
Изобретение было описано со ссылкой на предпочтительные варианты осуществления. Их модификации и изменения могут возникнуть после чтения и понимания предыдущего подробного описания изобретения. При этом предполагается, что изобретение включает в себя все такие модификации и изменения, если только они находятся в пределах объема прилагаемой формулы изобретения или ее эквивалентов.
Изобретение относится к способам и устройствам для улучшения большого поля зрения при получении изображений CT. В способе используются две процедуры сканирования: с центрированными источником излучения и детектором и в геометрии со смещением. Данные формирования изображения, полученные из обеих процедур сканирования, используются при реконструкции изображения. Кроме того, предоставлены способ и устройство для детектирования движения в реконструированном изображении путем генерирования карты движения, которая указывает области в реконструированном изображении, на которые воздействуют артефакты движения. Карта движения может использоваться для оценки движения и/или компенсации движения для исключения или уменьшения артефактов движения в получаемом реконструированном изображении. Использование изобретения позволяет ослабить артефакты движения и увеличить поле зрения. 3 н. и 19 з.п. ф-лы, 10 ил.
1. Устройство для получения данных томографической проекции во множестве угловых положений относительно объекта, расположенного в области исследования, причем устройство содержит:
источник излучения;
чувствительный к излучению детектор, который детектирует излучение, испускаемое источником, которое пересекло область исследования; и
блок реконструкции;
при этом устройство приспособлено для выполнения по меньшей мере двух процедур сканирования объекта;
при этом по меньшей мере первая процедура сканирования представляет собой процедуру сканирования с центрированной геометрией, при этом центр чувствительного к излучению детектора совмещен с центром вращения источника и детектора;
при этом по меньшей мере вторая процедура сканирования представляет собой процедуру сканирования в геометрии со смещением; при этом центр чувствительного к излучению детектора сдвинут на расстояние в приблизительно половину ширины детектора или более от центрального луча излучения в области исследования и центра вращения источника и детектора;
при этом данные проекции получают во время упомянутых по меньшей мере двух процедур сканирования, в том числе данные проекции с центрированной геометрией во время процедуры сканирования с центрированной геометрией и данные проекции в геометрии со смещением во время процедуры сканирования в геометрии со смещением; и
при этом блок реконструкции реконструирует данные проекции, полученные во время упомянутых по меньшей мере двух процедур сканирования, вместе, для генерирования объемных данных, указывающих на объект.
2. Устройство по п.1, в котором реконструкция, выполняемая блоком реконструкции, объединяет данные проекции, полученные во время упомянутых по меньшей мере двух процедур сканирования, для формирования набора данных, соответствующего сканированию формирования изображений, выполняемому единственным виртуальным детектором в одном положении относительно источника.
3. Устройство по п.1, в котором чувствительный к излучению детектор представляет собой плоский детектор и в котором центр чувствительного к излучению детектора сдвинут поперечно от центра вращения в трансаксиальной плоскости во время упомянутой по меньшей мере одной процедуры сканирования в геометрии со смещением.
4. Устройство по п.1, в котором алгоритм затухающего взвешивания и алгоритм усреднения применяют к области перекрытия данных проекции, полученных во время упомянутых по меньшей мере двух процедур сканирования во время реконструкции.
5. Устройство по п.1, в котором применяют меньшую дозу излучения во время упомянутой по меньшей мере одной процедуры сканирования в геометрии со смещением, чем во время упомянутой по меньшей мере одной процедуры сканирования с центрированной геометрией.
6. Устройство по п.5, в котором доза излучения, применяемая во время упомянутой по меньшей мере одной процедуры сканирования в геометрии со смещением, меньше чем половина излучения, применяемого во время упомянутой по меньшей мере одной процедуры сканирования с центрированной геометрией.
7. Устройство по п.1, при этом устройство представляет собой устройство формирования изображений компьютерной томографии с коническим лучом.
8. Устройство по п.1, дополнительно содержащее механический привод для перемещения чувствительного к излучению детектора относительно источника излучения.
9. Устройство по п.1, дополнительно содержащее процессор изображений, пользовательский интерфейс и блок ввода пользователя, и в котором процессор изображений обрабатывает объемные данные для отображения на пользовательском интерфейсе.
10. Способ формирования изображений компьютерной томографии, содержащий этапы, на которых:
выполняют по меньшей мере две процедуры сканирования объекта, в том числе:
получают данные проекции во время по меньшей мере одной процедуры сканирования с центрированной геометрией, при которой центр чувствительного к излучению детектора совмещается с центром вращения источника и детектора;
получают данные проекции во время по меньшей мере одной процедуры сканирования в геометрии со смещением, при которой центр чувствительного к излучению детектора сдвигается от центрального луча излучения в области исследования и центра вращения источника и детектора на расстояние в приблизительно половину ширины детектора или более;
получают данные проекции во время упомянутых по меньшей мере двух процедур сканирования, в том числе данные проекции с центрированной геометрией во время процедуры сканирования с центрированной геометрией и данные проекции в геометрии со смещением во время процедуры сканирования в геометрии со смещением; и
реконструируют данные проекции, полученные во время упомянутых по меньшей мере двух процедур сканирования, вместе, для генерирования объемных данных, указывающих на объект.
11. Способ по п.10, в котором реконструкция объединяет данные проекции, полученные во время упомянутых по меньшей мере двух процедур сканирования, для формирования набора данных, соответствующего сканированию формирования изображений, выполняемому единственным виртуальным детектором в одном положении относительно источника.
12. Способ по п.10, в котором чувствительный к излучению детектор представляет собой плоский детектор, дополнительно содержащий поперечный сдвиг центра чувствительного к излучению детектора от центра вращения в трансаксиальной плоскости во время упомянутой по меньшей мере одной процедуры сканирования в геометрии со смещением.
13. Способ по п.10, в котором технологию затухающего взвешивания и технологию усреднения применяют к области перекрытия данных проекции, полученных во время упомянутых по меньшей мере двух процедур сканирования во время реконструкции.
14. Способ по п.10, дополнительно содержащий применение меньшей дозы излучения во время упомянутой по меньшей мере одной процедуры сканирования в геометрии со смещением, чем во время упомянутой по меньшей мере одной процедуры сканирования с центрированной геометрией.
15. Способ по п.14, в котором доза излучения, применяемая во время упомянутой по меньшей мере одной процедуры сканирования в геометрии со смещением, меньше чем половина излучения, применяемого во время по меньшей мере одной процедуры сканирования с центрированной геометрией.
16. Способ генерирования карты движения, причем способ содержит этапы, на которых:
получают данные проекции во множестве угловых положений относительно объекта, расположенного в области исследования;
осуществляют реконструкцию по данным проекции для генерирования опорного изображения;
получают опорные данные проекции из прямой проекции опорного изображения;
вычисляют разности между полученными данными проекции и опорными данными проекции для определения разностей линейных интегралов; и
используют разности линейных интегралов для генерирования карты движения, указывающей на области соответствующего изображения, реконструированного по данным проекции, на которые воздействует движение.
17. Способ по п.16, дополнительно содержащий этап применения оконной обработки для улучшения карты движения.
18. Способ по п.16 или 17, дополнительно содержащий этапы улучшения карты движения путем нормализации карты движения, применения объемного медианного фильтра к карте движения и применения гауссова размывания к карте движения.
19. Способ по п.16 или 17, дополнительно содержащий этап использования карты движения вместе с соответствующим изображением, реконструированным по данным проекции, для детектирования областей реконструированного изображения, на которые воздействует движение.
20. Способ по п.16 или 17, дополнительно содержащий этап использования карты движения вместе с технологией коррекции движения для компенсации эффектов движения в соответствующем изображении, реконструированном по данным проекции.
21. Способ по п.20, дополнительно содержащий компенсацию движения только в областях соответствующего изображения, которые указаны как области, на которые воздействует движение, посредством карты движения.
22. Способ по п.20, дополнительно содержащий компенсацию движения посредством применения взвешенного значения коррекции движения к областям соответствующего изображения, реконструированного по данным томографической проекции, причем взвешенное значение вычисляют для каждой области на основании количественной величины движения, указанной для каждой области изображения картой движения.
| US 2004013225 A1, 22.01.2004 | |||
| US 2006133564 A1, 22.06.2006 | |||
| US 5032990 A, 16.07.1991 | |||
| US 2008123804 A1, 29.05.2008 | |||
| С.С.Слапик "Приоритеты использования метода компьютерной томографии в диагностике заболеваний органов грудной клетки", Новости лучевой диагностики | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |

