ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[0001] Настоящее изобретение в целом относится к компьютерной томографии и, конкретнее, к оптимизации согласованности пи-линий для получения геометрического совмещения, коррекции движения образца и нормализации интенсивности в компьютерной томографии.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0002] Для получения данных о внутренней структуре образца в компьютерной томографии (КТ) используют разные способы исследования, например, рентгеновские лучи или электронные пучки. Для получения данных, снятых под многими углами относительно образца, в системах КТ обычно используют перемещение, например вращение, образца и источника рентгеновского излучения и детектора относительно друг друга. Затем данные сканирования могут обрабатываться с помощью алгоритмов для получения реконструкций участков внутри образца. На разрешающую способность реконструкций могут влиять расстояния между различными компонентами, такими как источник, образец и детектор. Например, в системах КТ с конусным пучком излучения большое расстояние между источником и образцом обычно приводит к снижению разрешающей способности полученных данных. Кроме того, на качество реконструкций могут влиять зависимые от времени изменения компонентов системы, которые происходят в процессе сканирования. Например, перемещение образца и/или источника-детектора может быть не совсем таким, как ожидаемое, что приводит к несовмещению. К тому же, изменяющаяся по времени интенсивности источника также может оказывать влияние на полученные данные.
[0003] Несовмещение может повлиять на качество реконструкций. Хотя было предпринято много попыток смягчить такое зависимое от времени несовмещение и изменения интенсивности источника, такие попытки требуют больших вычислительных затрат или использования чрезвычайно точной механики. Следовательно, требуется способ решения проблемы, связанной с временным несовмещением и изменениями интенсивности источника, устраняющий ограничения из предыдущих решений. В более общем случае, этот способ может быть применен к оценке после получения любой формы отклонения от идеализированного эксперимента, которая проявилась бы в ненулевом значении разности данных для лучей противоположного направления.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В данном документе раскрыты способы и устройства для геометрического совмещения, коррекции движения образца и нормализации интенсивности проекций компьютерной томографии с использованием оптимизации пи-линий. Примерный способ по меньшей мере включает в себя получение множества проекций образца, причем каждую проекцию из упомянутого множества получают в различном местоположении вокруг образца на основе траектории; определение пар противоположных проекций из упомянутого множества проекций на основе соответствующей пи-линии; и определение величину несогласованности между данными соответствующей пи-линии для каждой пары противоположных проекций, для которых данные для пи-линии основаны по меньшей мере частично на данных измеренной интенсивности.
[0005] Система КТ содержит источник для выдачи рентгеновского излучения, детектор для обнаружения рентгеновских лучей после их прохождения через образец и контроллер, выполненный с возможностью управления источником и детектором, причем контроллер дополнительно содержит управляющую программу, которая, будучи исполняемой, заставляет контролеру команду получать множество проекций образца, причем каждая проекция из упомянутого множества проекций получается в различном местоположении вокруг образца на основе траектории; определять пары противоположных проекций из упомянутого множества проекций образца на основе соответствующей пи-линии; и определять величину несогласованности между данными соответствующей пи-линии для каждой пары противоположных проекций, где данные пи-линии основаны по меньшей мере частично на данных ослабления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Фиг. 1 представляет собой схематическое изображение системы КT согласно варианту осуществления изобретения по данному раскрытию.
[0007] Фиг. 2А и 2В представляют собой примеры КТ сканирований согласно варианту осуществления изобретения по данному раскрытию.
[0008] Фиг. 3А-3С представляют собой схемы проекций сканирования КТ в горизонтальной плоскости согласно варианту осуществления изобретения по данному раскрытию.
[0009] Фиг. 4 представляет собой схематическое изображение комбинации двух проекций пи-линии согласно варианту осуществления изобретения по данному раскрытию.
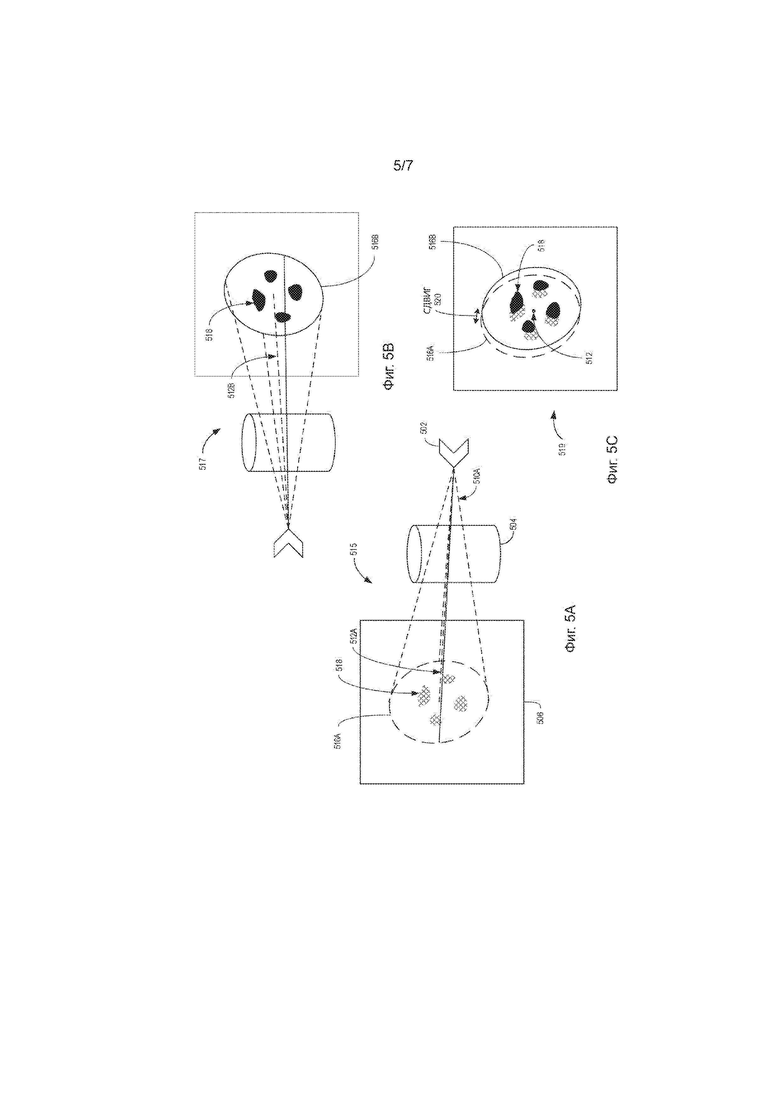
[0010] Фиг. 5А-5С изображают пару проекций согласно варианту осуществления изобретения по данному раскрытию.
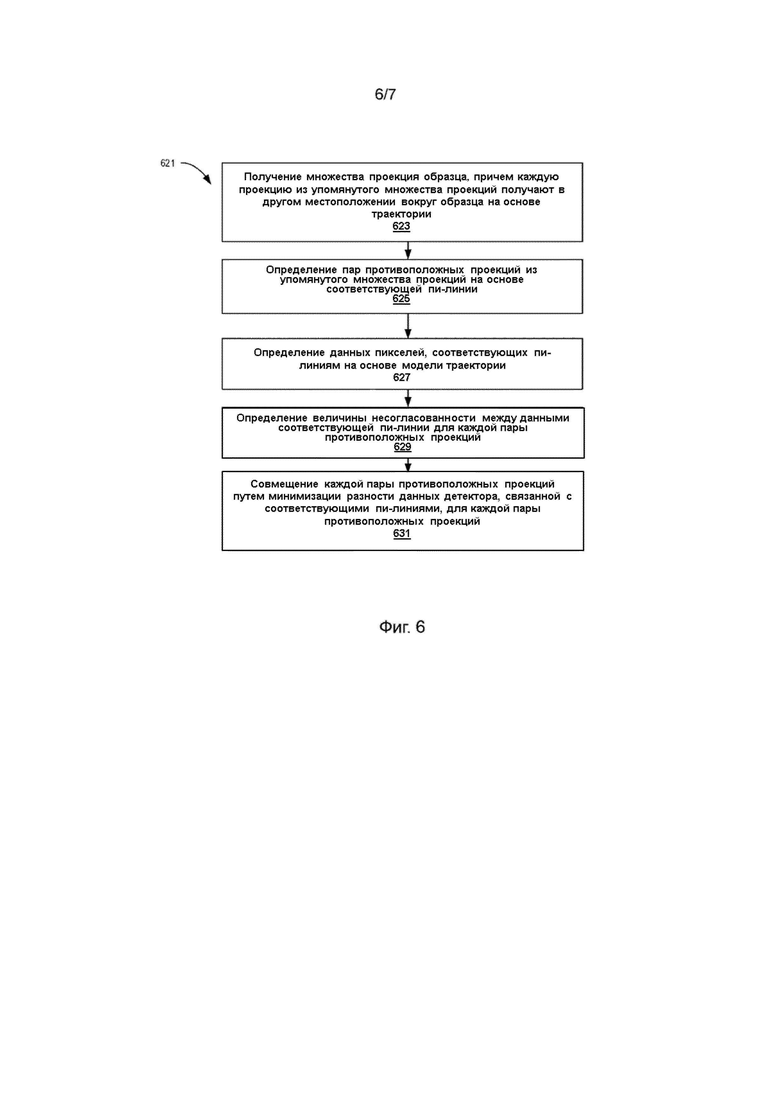
[0011] Фиг. 6 описывает примерный способ совмещения проекций КТ сканирования на основе пи-линий согласно варианту осуществления изобретения раскрытому в данном документе.
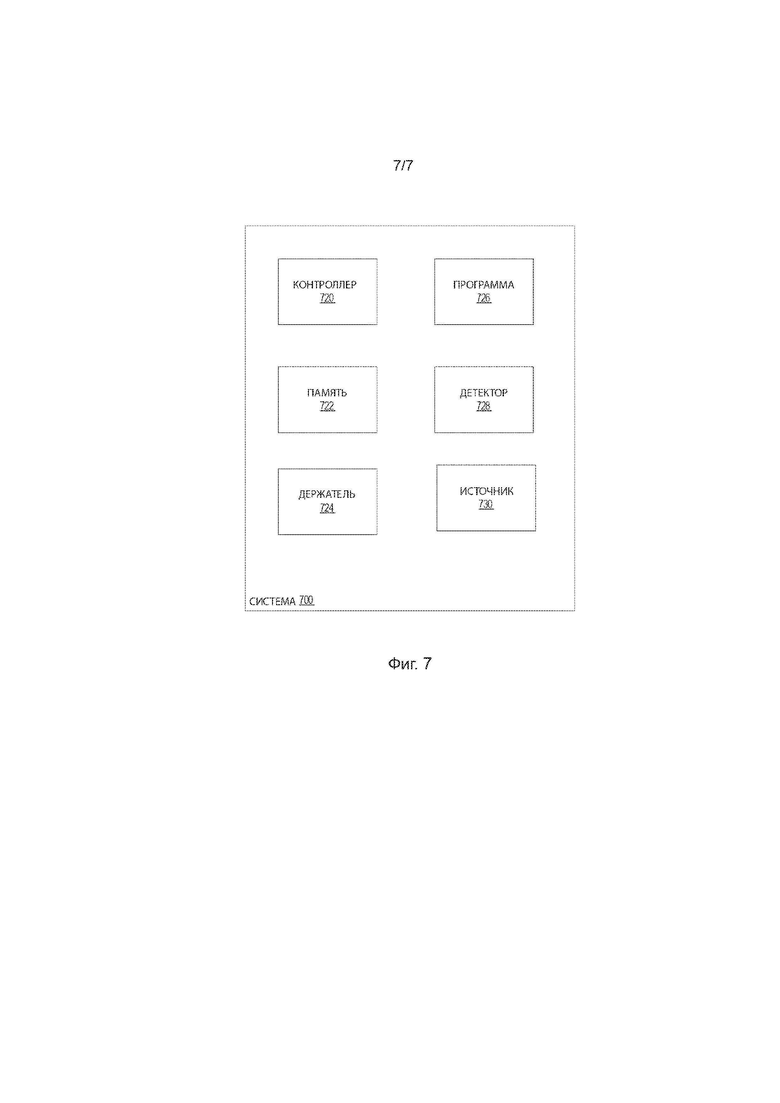
[0012] Фиг. 7 представляет собой примерную функциональную блок-схему системы КT согласно варианту осуществления изобретения по данному раскрытию.
[0013] Одинаковые номера позиций относятся к соответствующим частям на нескольких видах чертежей.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0014] Варианты осуществления по настоящему изобретению описаны ниже в контексте устройства томографической визуализации для микроразмерной или наноразмерной компьютерной томографии малых объектов, которые могут быть любой формы, но которые часто имеют цилиндрическую форму, с использованием конусного пучка рентгеновского излучения и круговой либо спиральной траектории сканирования. В некоторых вариантах осуществления изобретения пи-линии могут быть использованы для совмещения проекций, таких как пары почти противоположных друг к другу проекций, для коррекции зависимого от времени несовмещения и других варьирующих во времени изменений системы, а также могут комбинироваться со способами коррекции статических несовмещений. Такое зависимое от времени несовмещение и другие варьирующие во времени изменения, такие как несогласованная яркость источника, как правило, могут быть отнесены к несогласованностям в данных, связанным с противоположными проекциями. Однако понятно, что способы, описанные в данном документе, общеприменимы к широкому диапазону различных томографических способов и устройств, включая системы как с конусным, так и параллельным пучком излучения, и не ограничиваются каким-либо конкретным типом устройства, типом пучка, типом объекта, линейным масштабом или траекторией сканирования
[0015] В контексте настоящей заявки и в пунктах формулы изобретения упоминание элемента в единственном числе не исключает множества таких элементов за исключением случаев, когда явно подразумевается иное. Кроме того, термин «включает» означает «содержит». К тому же термин «соединенный» не исключает наличия промежуточных звеньев между соединенными элементами.
[0016] Никоим образом не следует считать, что данный документ ограничен системами, устройствами и способами, раскрытыми в нем. Наоборот, настоящее изобретение направлено на всем новые и неочевидные признаки и аспекты различных раскрытых вариантов осуществления, как взятым отдельно, так и в различных комбинациях и подкомбинациях одного с другим. Раскрытые системы, способы и устройства не ограничены каким-либо конкретным аспектом или признаком, или сочетанием вышеуказанного, а также раскрытые системы, способы и устройства не требуют наличия какого-либо одного или более конкретных преимуществ или решений проблемы. Любые описания функционирования использованы для облегчения разъяснения, но раскрытые системы, способы и устройства не ограничены такими принципами действия.
[0017] Хотя для удобства изложения действия некоторых из раскрытых способов описаны в определенном последовательном порядке, следует понимать, что этот стиль описания включает в себя изменение порядка их выполнения за исключением случаев, когда нижеследующие конкретные формулировки требуют в описании использования определенной последовательности. Например, в некоторых случаях порядок выполнения действий, изложенных последовательно, может быть изменен либо такие действия могут выполняться одновременно. Помимо этого, для простоты изложения, прилагаемые фигуры могут не отображать различных вариантов использования раскрытых систем, способов и устройств в сочетании с иными системами, способами и устройствами. Кроме того, для описания раскрытых способов в описании иногда используются такие термины, как «изготавливать» и «получать». Эти термины представляют собой абстрактные формы высокого уровня для фактически выполняемых действий. Фактические действия, которые соответствуют этим терминам, будут меняться в зависимости от конкретного варианта осуществления и легко определяются специалистом в данной области техники.
[0018] В некоторых примерах значения, процедуры или устройства обозначены как «самые низкие», «лучшие», «минимальные» или тому подобное. Понятно, что такие описания предназначены для указания на возможность выбора из множества используемых функциональных альтернативных вариантов, и для выбранного варианта не требуется быть лучше, меньше или более предпочтительным по сравнению с другими. Кроме того, выбранные значения могут быть получены с помощью численных или иных приближенных способов вычисления и представлять собой лишь приближение к абсолютно точным значениям.
[0019] Лабораторные системы КТ, которые могут быть применимы для получения микроразмерных или наноразмерных данных, используют для визуализации различных образцов. Образцы могут быть биологическими, минералогическими, кристаллографическими и т.п., а полученное изображение может представлять собой реконструкцию внутренней структуры. В общем случае система КТ содержит источник рентгеновского излучения и детектор с образцом, расположенным между ними. Источник КТ может испускать излучение равномерно по широкоугольному конусу (КТ на основе широкоугольного конуса может называться конусно-лучевой томографией), и эффективность такой конусно-лучевой томографии возрастает при более высоких углах падения конуса на образец, что может быть получено за счет использования небольших расстояний между источником и образцом. Как было отмечено, эти системы КТ либо перемещают образец относительно источника и детектора, либо перемещают совместно источник и детектор относительно образца. В некоторых вариантах осуществления изобретения относительное перемещение образца по отношению к источнику и детектору может включать в себя вращение либо образца, либо пары источник-детектор. Например, образец может вращаться, то есть вращаться вокруг оси в пространстве между источником и детектором. В системах КТ могут наблюдаться зависимое от времени несовмещение в процессе сканирований и/или несогласованностей в функционировании различных компонентов от проекции к проекции, что может, например, приводить к нежелательному ухудшению качества реконструкций.
[0020] Ряд эффектов может вызывать нежелательное относительное перемещение точечного источника рентгеновского излучения, образца и детектора, приводящие к несовмещению томографического устройства. Некоторые компоненты систем КТ могут изменяться во время получения данных, например, смещение точки источника рентгеновского излучения, погрешности в моторизированных этапах позиционирования и тепловое расширение компонентов представляют собой несколько примеров, приводящих к ошибкам несовмещения. Кроме того, временные или пространственные изменения интенсивности источника и/или спектрального состава источника также могут приводить к получению несогласованных данных. Несогласованные данные ухудшают качество изображения, что обычно проявляется, например, в артефактных пространственных изменениях значений серого в реконструированных изображениях. Как проблемы совмещения, так и проблемы несогласованных данных в системах КТ могут приводить к ухудшению качества изображения и реконструкций. В контексте данного документа термин «несогласованность» может использоваться для описания несовмещения, несогласованных данных либо того и другого, а раскрытые в данном документе способы направлены на решение проблем, связанных с обоими явлениями, рассмотренными либо в отдельности, либо в их сочетании.
[0021] Ошибки, связанные с моторизированным позиционированием, могут в некоторых случаях создавать серьезные проблемы. Стандартные механические устройства могут оказаться непригодными для обеспечения точности полного трехмерного позиционирования, необходимого для микроразмерных и наноразмерных систем КТ. Обычно желательно иметь устройства, способные выдерживать большие нагрузки и обеспечивать значительные длины перемещений. Однако такие устройства могут быть недостаточно точными и могут демонстрировать систематические и несистематические ошибки движения, например, мертвый ход. Поэтому, как правило, при реконструкции изображения микро-КТ необходимо проводить коррекцию несовмещения. В настоящем описании разъяснен способ идентификации и коррекции как статических, так и зависимых от времени ошибок на основе минимальных допущений и относительно небольших вычислительных затрат. По сравнению с известными техническими способами раскрытый подход является значительно более надежным и эффективным, особенно при применении к данным, полученным их высокоизотропных траекторий сканирования, таких как заполняющие пространство траектории, что может быть связано с тем, что более изотропные траектории имеют пи-линии, которые более широко распределены по пространству возможных положений и углов .
[0022] Кроме того, ошибки, связанные с получением несогласованных данных из-за временных или пространственных изменений интенсивности источника и/или спектрального состава источника могут создавать проблемы с проведением реконструкций. Например, различия в интенсивности источника и/или его спектральном составе могут приводить к различным значениям ослабления, и например, к слабому соответствию между противоположными проекциями.
[0023] Траектории сканирования, будь то круговая, спиральная, двойная спиральная или заполняющая пространство обычно имеют множество пар проекций, для которых точки источника размещены практически с противоположных сторон образца. Обычно траектории сканирования могут быть определены системой координат в системе отсчета образца, причем траекторию задает движение точечного источника в системе координат. Корректно совмещенные данные могут повысить качество реконструированных изображений. Усовершенствования могут способствовать повышению симметрии траектории сканирования, как фактической, так и расчетной, снижению изменения коэффициента усиления в пределах образца или, например, при большем числе углов обзора. Однако, если несовмещенные в противоположном направлении проекции не находятся в ожидаемом/желаемом местоположении, основанном на модели траектории, например, в результате статического и/или зависимого от времени несовмещения, как обсуждалось выше, тогда получающиеся в результате реконструкции могут иметь качество хуже ожидаемого, что проявляется в появлении фантомных контуров, размытия либо смазывания изображения, «двойных контуров» и т.д. Эти несовмещения, как правило, более существенны для микро- и нано- КТ из-за размера вокселей и значения относительного несовмещения, которое имеет тот же порядок величины. Несмотря на то, что в течение ряда лет были разработаны различные способы совмещения, такие как программное совмещение на этапе после получения данных («апостериори») и физическое совмещение систем на этапе до получения данных, такие известные способы либо обеспечивают неполную коррекцию, либо требуют больших затрат временных и/или финансовых ресурсов. Следовательно, необходим способ совмещения, реализация которого требует меньшего количества операций компьютерной обработки.
[0024] Одно из решений включает высокоточный апостериорный способ измерения и коррекции зависимого от времени несовмещения томографического устройства до процесса реконструкции путем использования пар лучей с разных направлений, которые проходят один и тот же путь через образец, но в противоположных направлениях и, следовательно, выдают избыточную информацию. В контексте данного документа термины «луч» и «лучи» относятся к среде передачи, например рентгеновскому излучению или электронам, проходящим через образец по пути от источника к детектору. Каждый луч может воздействовать на пиксель детектора, а уровень интенсивности соответствующего луча записывают. При этом уровень интенсивности указывает на степени ослабления луча, прошедшего через образец, или величину преломления/дифракции из-за фазовой природы образца. Уровни интенсивности, записанные на детекторе, могут затем вносить вклад или быть использованы для получения двумерного проекционного изображения. Измеренную интенсивность каждого луча, проходящего через образец, можно сравнить со значением интенсивности эквивалентного беспрепятственно распространяющегося луча, например, из проекции «яркого поля», полученной при удалении образца, при этом сравнение обеспечивает указание на соответствующее ослабление луча или изменении его фазы. Противоположные лучи, которые проходят один и тот же путь, могут называться пи-линиями, и любая пи-линия будет проходить через местоположение источника на каждой проекции из пары или из пар проекций, а также проходить путь через образец. Другим способом определения пи-линии была бы прямая линия между источником двух противоположных проекций, которая проходит по одному и тому же пути через образец и местоположение источника каждой из противоположных проекций. Кроме того, данные детектора от соответствующих лучей должны быть одинаковыми из-за одинакового ослаблении от образца.
[0025] С помощью данного способа можно достичь совмещения системы, скорректировать ошибки моторизированного позиционирования образца и скомпенсировать временные изменения потока источника, например, изменения потока рентгеновского излучения, поскольку каждый из этих факторов может привести к тому, что две точки данных детектора будут неодинаковыми. Для достижения вышеизложенной цели параметры, управляющие траекторией сканирования, расчетной либо фактической, изменяют достижения максимальной согласованности между парами точек данных, соответствующих каждой идентифицированной пи-линии. С целью компенсации ошибок движения точка источника или положение детектора могут быть смещены на основе каждой проекции, в то время как изменения потока могут быть скомпенсированы путем изменения интенсивности изображения для каждой проекции. По сравнению с другими способами рассматриваемый в данном документе способ с использованием пи-линий является более эффективным с точки зрения вычислений и может устранить статическое и зависимое от времени несовмещение наряду с изменением интенсивности в одном процессе. Вариации данного способа потенциально могут быть применены к неполным траекториям сканирования, имеющим недостаточное число пи-линий, в сочетании с условиями эпиполярной согласованности либо с помощью отдельного «контрольного сканирования», где до или после первичного получения данных получают подмножество проекций. К тому же, способ можно объединять с другими существующими способами коррекции несовмещения или их вариациями, при этом способы объединяют либо последовательно (когда с помощью одного способа уточняют оценку другого), либо совместно, либо путем использования каждого способа для коррекции различных аспектов.
[0026] Кроме того, способ получения низких вычислительных затрат может использовать исходные собранные данные для определения наличия какого-либо несовмещения и/или несогласованности и исправить такие несовмещение и/или несогласованность, если это необходимо. В некоторых вариантах осуществления настоящего изобретения к исходным данным могут быть отнесены необработанные данные детектора или данные детектора после незначительной коррекции, например, по яркому полю или темному полю. Могут быть определены пи-линии и могут быть сопоставлены исходные данные для связанных пи-линий. В общем случае пи-линии могут быть рассчитаны в реальном (непрерывном) пространстве, и они могут не совпадать идеально с конкретным пикселем детектора. В этом случае требуется некоторая интерполяция значений пикселей детектора. В случае отсутствия несовмещения/несогласованности данные для двух точек, соответствующих каждой пи-линии («данные пи-линий»), должны быть идентичными, поскольку оба луча проходят один и тот же путь через образец независимо от направления, что приводит к одинаковым величинам ослабления. Однако если между противоположными проекциями существует несовмещение/несогласованность, то данные пи-линий могут отличаться. Чтобы скорректировать несовмещение/несогласованность, одна или обе противоположные парные проекции для каждой пары проекций для пи-линии могут быть поступательно перемещены, повернуты или увеличены, чтобы свести разность к минимуму. В альтернативном варианте траектория сканирования, фактическая или смоделированная, может быть изменена для представления несовмешения/несогласованности, например, путем смещения точки источника для каждой проекции, соответствующей каждой проекции, полученной во время сканирования. В некоторых вариантах осуществления настоящего изобретения каждое сканирование может приводить к значительному числу пар проекций для пи-линии, и несовмещение может быть скорректировано для каждой пары по пи-линии либо одновременно, либо в результате итераций. В целом следует признать, что точность субпикселя (или субвокселя) может быть получена как в результате такой интерполяции на детекторе, так и потому, что можно интерполировать целевую функцию, вычисленную с использованием способа оптимизации, для определения минимальной точности до субвокселя.
[0027] Хотя в данном документе преимущественно рассматривают полные сканирования образца, не следует считать, что изобретение ограничено таковым. Следует отметить, что изобретение также может быть использовано при сканировании исследуемой области (ИО), в которой область сканирования охватывает лишь часть образца. При сканировании в ИО особенно полезно проводить коррекцию интенсивности, поскольку в этом случае отсутствуют неослабленные лучи, которые можно сравнивать со значениями для яркого поля для оценки изменения интенсивности. В таком случае, при использовании термина «образец», его следует заменить на «исследуемый под-объем в образце».
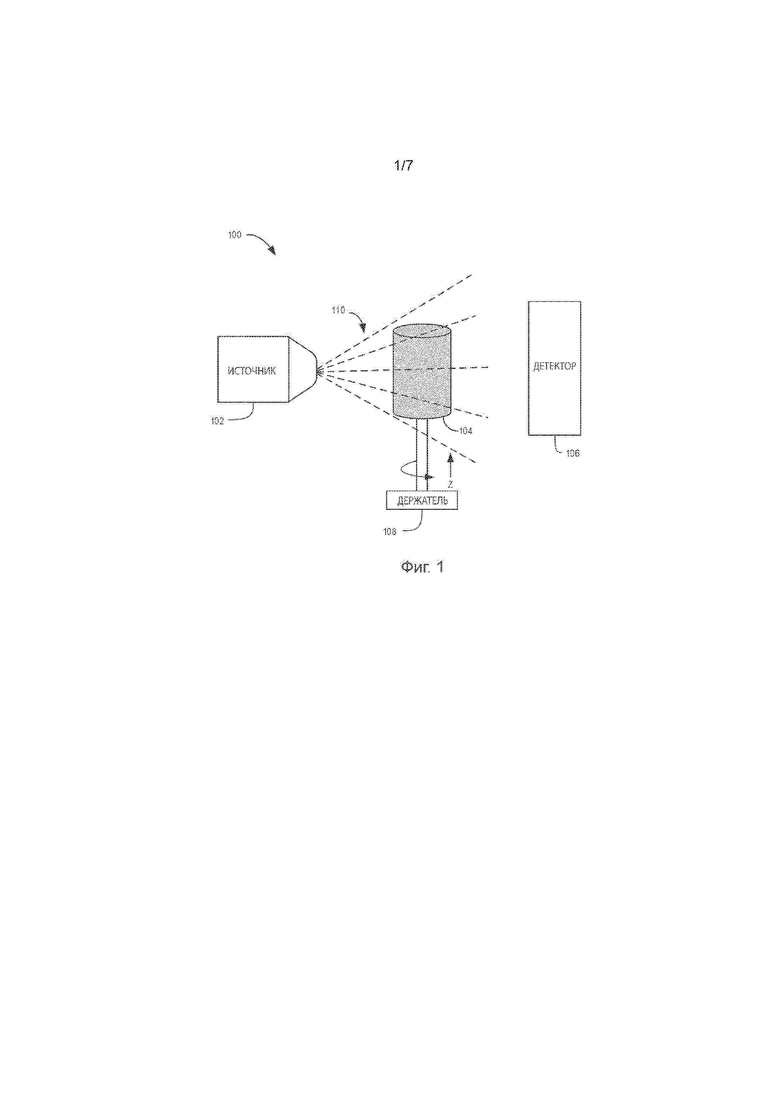
[0028] Фиг. 1 представляет собой схематическое изображение системы КT 100 согласно варианту осуществления изобретения по настоящему раскрытию. Систему КТ 100 можно использовать для получения проекций образца и выдачи в ответ изображений КТ и/или реконструкций. Система КТ 100 может по меньшей мере содержать источник 102, держатель 108 и детектор 106. В некоторых вариантах осуществления источник 102, держатель 108 и детектор 106 могут быть соединены с управляющей электроникой (не показана), которая управляет их работой и принимает данные от по меньшей мере детектора 106. Система КТ 100 может получать проекции, например, в виде данных по ослаблению рентгеновского излучения, образца 104, которые затем можно использовать для получения реконструкций желаемых областей и/или объемов образца 104. В некоторых вариантах осуществления пи-линии могут быть использованы для коррекции зависимого от времени несовмещения и/или флюктуаций источника в системе КТ 100. В общем случае, в контексте данного документа термины «несогласованность», «несогласованности» и «несогласованные данные» могут одновременно относиться как к зависимому от времени несовмещению, так и зависимым от времени флюктуациям источника, включая интенсивность источника и его спектральный состав. Однако такие термины могут также относиться к тем или иным зависимым от времени проблемам. Коррекция несогласованностей может быть выполнена апостериори, но до начала процесса реконструкции. В некоторых вариантах осуществления для коррекции несогласованностей могут быть использованы исходные или незначительно скорректированные проекционные данные. Обычно данные сканирования могут проходить различные этапы предварительной обработки для коррекции дефектных пикселей, нелинейного отклика детектора, увеличения жесткости излучения, темных полей, ярких полей и/или линеаризации. Вследствие этого основанный на пи-линиях способ коррекции, например, путем минимизации разности пи-линии, раскрытый в данном документе, может быть использован место на любом этапе предварительной обработки полученных данных до этапа использования данных для реконструкции изображения.
[0029] Источник 102 может выдавать рентгеновские лучи 110 в форме конусного излучения, испускаемого источником 102 под большими углами конусности. В контексте данного документа, «большой угол конусности» обозначает угол, отсчитываемый от нормали к источнику 102. Исходя из этого определения, малый угол конусности будет представлять собой меньший угол, отсчитываемый от нормали. В общем случае, большой угол конусности обозначает больший конус, а малый угол конусности обозначает меньший конус. Кроме того, относительные расстояния между источником 102, образцом 104 и детектором 106 могут оказывать влияние на величину угла конусности, используемого для получения любой проекции. Эти относительные расстояния могут в целом влиять на величину разрешения сканирований, а также на область сканирования (ОСк). Как было упомянуто, при уменьшении этих расстояний могут быть получены изображения с более высоким разрешением за счет увеличения потока рентгеновского излучения, проходящего через образец 104 и попадающего на детектор 106.
[0030] Детектор 106 может быть установлен для приема рентгеновских лучей, прошедших через образец 104. Детектор 106 может содержать сцинтиллятор, который при облучении рентгеновскими лучами генерирует световое излучение в видимой области спектра, и CCD или плоский датчик на основе аморфного кремния, установленный за сцинтиллятором, который генерирует данные изображения, представляющие собой двумерные изображения пространственного расположения сцинтилляций, генерируемых сцинтиллятором. В результате получается двумерное изображение или карта интенсивности рентгеновского излучения для рентгеновских лучей, проходящих через объект. Полученная в результате карта или карта интенсивности рентгеновского излучения может называться, например, проекцией. Понятно, что каждое из этих изображений показывает как внешние, так и внутренние структурные элементы образца 104, проецируемые вдоль направления распространения рентгеновских лучей, передаваемых через образец 104 на детектор 106.
[0031] Держатель 108 поддерживает образец 104. В некоторых вариантах осуществления держатель 108 может обладать возможностью вращения по направлению часовой стрелки, против направления часовой стрелки или в обоих направлениях (Θ показан на фиг. 1) и дополнительно обладать возможностью осуществлять поступательное перемещение вверх и вниз как показано в направлении Z, как показано на фиг. 1. В некоторых вариантах осуществления держатель 108, тем не менее, может оставаться неподвижным, в то время как источник 102 и детектор 106 совместно вращаются вокруг образца, также поступательно перемещаясь вдоль направлений +/– Z. Относительное перемещение образца 104 и пары источник 103/детектор 106 может определять траекторию, используемую при получении проекций, например данных изображения. В некоторых вариантах осуществления траектория может быть двухмерной, в то время как в других вариантах осуществления траектория может быть трехмерной. Например, 2D траектория может представлять собой окружность, например, с частичным или полным поворотом вокруг образца 104 в той же плоскости, а 3D траектория может представлять собой спираль или двойную спираль, образованную вокруг образца 104. Траектории в виде заполняющих пространство кривых (ПК) также могут быть использованы для получения 3D проекций образца 104, и могут считаться трехмерными траекториями. Траектории ПК могут образовывать совокупность точек сбора данных, расположенных вокруг поверхности образца 104, и будут более подробно рассмотрены ниже.
[0032] Траектории выполняются системой КТ 100 для получения проекций образца 104 под желаемыми углами, например, в точках сканирования КТ вокруг образца 104. Траектории могут быть представлены как пути и/или положения сбора данных, в которых могут находиться источник 102 и детектор 106 вокруг образца 104 независимо от выбора фактически движущегося компонента. При движении по желаемой траектории система КТ 100 может получать изображения с изменяющимися скоростями, которые включают в себя непрерывные, полунепрерывные или периодические. Затем изображения могут быть объединены/обработаны для получения реконструкций срезов образца 104 вдоль любой желаемой плоскости.
[0033] Проекции представляют собой рентгеновские изображения образца 104, полученные с помощью рентгеновских лучей 110. Рентгеновские лучи 110 испускаются из источника 102, передаются через образец 104, чтобы столкнуться с детектором 106. Рентгеновские лучи 110 могут испускаться, например, в геометрии веерного типа или в форме конуса. Каждый индивидуальный рентгеновский луч 110 проходит разный путь или линию от источника 102 к детектору 106 таким образом, что каждый рентгеновский луч 110, который проходит через образец 104, сталкивается с разным пикселем детектора 106 либо с промежуточным местоположением на детекторе 106, для которого промежуточные местоположения образуются между двумя или более пикселями. Данные детектора, например исходные данные по интенсивности, могут затем становиться затененными участками образца 104 на детекторе 106 вследствие ослабления рентгеновских лучей образцом 104 или вследствие фазового характера образца. Вследствие этого, данные детектора могут предоставлять информацию об ослаблении для образца 104 в соответствии с каждой рентгеновской линией или лучом. Для проекций, которые были получены с противоположных сторон образца 104, могут существовать рентгеновские линии, например, лучи, которые совмещены друг с другом и с источником 102. Лучи, которые совмещены друг с другом, могут проходить через образец по тому же пути, но в противоположных направлениях. Эти типы рентгеновских линий, как было рассмотрено выше, называют пи-линиями, поскольку они отстоят друг от друга на 180º, например, разделены углом в пи радиан. Как отмечалось, наряду с прохождением одинаковых линий внутри образца, пи-линии будут совмещены с источником с обеих сторон. При получении проекции система КТ 100 может моделировать траекторию и на основе модели определять, какие проекции должны быть противоположными, и дополнительно определять, какой пиксель на детекторе 106 будет содержать данные ослабления для пи-линии. В некоторых вариантах осуществления пи-линии могут не сталкиваться с отдельным пикселем, а попадать на детектор 106 в местоположения между пикселями, например, в промежуточные местоположения. В таком варианте осуществления настоящего изобретения данные, полученные для пикселей из окрестности точки столкновения, могут быть интерполированы или усреднены для получения пиксельных данных пи-линии.
[0034] Поскольку пи-линии проходят один и тот же путь или линию через образец, они должны иметь одинаковые проекционные данные, например, пиксельные данные или данные ослабления. Однако, если пиксельные данные, связанные с пи-линиями, отличаются, например, не идентичны, то может быть установлено, что проекции, например проекции пи-линий, могут быть несовмещены друг с другом. Это несовмещение, например, может быть вызвано зависимым от времени движением компонента(ов) системы КТ, таким как дрейф источника 102, несогласованное перемещение держателя 108, несогласованное перемещение детектора 106 и т.п. или дополнительно вследствие геометрической ошибки или нескорректированного сдвига интенсивности/спектрального состава источника 102. Кроме того, если противоположные проекции несогласованы, либо вследствие несовмещения и/или несогласованность источника, то данные КТ могут быть изначально противоречивыми, и может быть трудно или невозможно произвести точную реконструкцию. В общем реконструкции КТ могут зависеть от идеальной или почти идеальной геометрической модели, и если в движении присутствуют неоднородности, например несовмещения, или несогласованность источника, то данные КТ могут быть изначально несогласованы, что может привести к трудностям или невозможности осуществления достоверной реконструкции. Например, реконструкции из несогласованных противоположных проекций могут содержать среди прочего искажения в виде размытия либо смазывания изображения и «двойных контуров». Пи-линии могут быть использованы для коррекции несовмещения/несогласованностей и уменьшения либо устранения искажений в проекциях и реконструкциях. Например, если система КТ 100 определит, что пи-линии из пары противоположных проекций отличаются, то система 100 может произвести смещение одной или обеих проекций из пары противоположных проекций для минимизации разность данных этой пи-линии. В некоторых вариантах осуществления настоящего изобретения модель траектории может быть отрегулирована с учетом несовмещения. Например, модель траектории может быть параметризована с целью определения того, где проекции были быть получены без какой-либо зависимой от времени несогласованности/несовмещения пи-линии и связанной с этим минимизации. В других вариантах осуществления для совмещения пи-линий противоположные проекции могут быть смещены, повернуты или увеличены. В любом случае, коррекция несовмещений, как правило, приводит к размещению разных пикселей детектора 106 в конце каждой пи-линии, изменяя при этом сравниваемые значения и, как следствие, общую согласованность пи-линии.
[0035] Обычно каждая проекция составляет пару с большим количеством других проекций, для которых точка источника находится на другой стороне образца. Для пары проекций, которые являются достаточно противоположными, имеется общий, но противоположный по направлению путь пройденный лучом (например, пи-линия), потому что положение источника для одной проекции находится в области КТ сканирования для другой проекции. В некоторых примерах для каждой противоположной пары проекций для согласования по меньшей мере этих двух проекций может быть использована только одна пи-линия. Для согласования проекций с использованием малого количества допущений могут быть использованы исходные или практически исходные пиксельные данные, связанные с пи-линиями, выбранными на основе модели траектории. В общем случае раскрытый способ позволяет определять несовмещение на основе исходных или практически исходных пиксельных данных с использованием малого количества допущений, особенно по сравнению с известными способами. И поскольку согласование может быть осуществлено на основе проекции, зависимые от времени несовмещения, появившиеся между проекциями, могут быть исправлены или устранены. Кроме того, для коррекции несовмещения могут не потребоваться пробные реконструкции, которые необходимы для некоторых других способов, поскольку для коррекции используют исходные или практически исходные данные проекций. Хотя согласование с помощью пи-линий применимо к любому типу траектории, некоторые траектории могут быть скорректированы проще или более эффективно, чем другие. Например, траектория ПК может быть скорректирована проще или более эффективно по сравнению со спиральной траекторией, что может быть связано с пространственным положением траектории ПК и соответствующим широким распределением направлений и положений пи-линий.
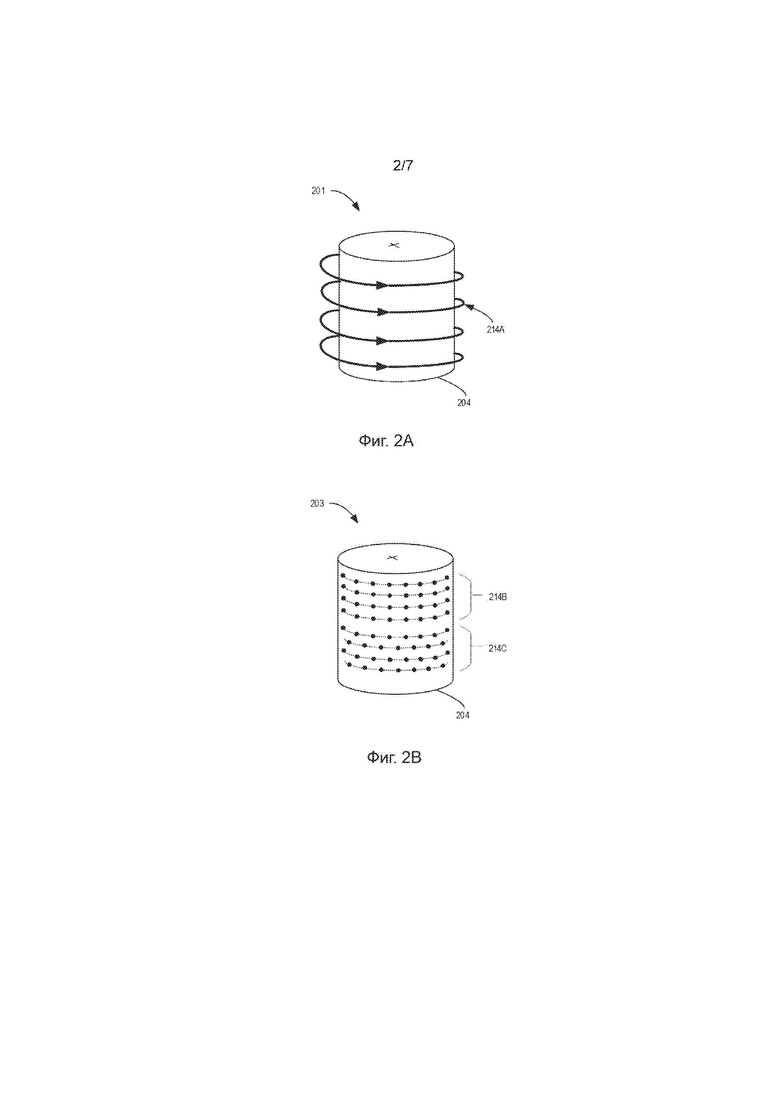
[0036] На фиг. 2А и 2В представлены примеры КТ сканирований 201 и 203 соответственно согласно варианту осуществления по настоящему раскрытию. Сканирования 201 и 203 КТ (или сканирования) могут быть получены, например, системой 100 и выполняются для получения проекций образца 204 на основе разных траекторий сканирования. Например, сканирование 201 для получения проекций образца 204 использует траекторию сканирования 214A, тогда как сканирование 203 для получения проекций образца 204 использует траектории сканирования 214B и/или 214C. Хотя в настоящем изобретении описаны только три разные траектории сканирования, траектория сканирования, реализованная с помощью любого данного КТ сканирования, для настоящего раскрытия не является ограничивающим аспектом, а в данном документе предполагаются все возможные траектории сканирования. Следует отметить, что графическое отображение сканирований не приведены в фактическом масштабе, и что в данном документе предполагаются все возможные расстояния между точками сканирования или линиями сканирования. Проекционные данные, полученные с помощью сканирований 201 и 203, могут использоваться, например, для создания томограмм и реконструкций образца 204, а противоположные проекции, полученные с помощью сканирований КТ 201 и 203, могут использоваться для коррекции несовмещения с использованием связанных пи-линий. Следует отметить, что, как правило, может существовать большое число противоположных проекций, поскольку каждая проекция будет «противоположна» большому числу других проекций в том смысле, что для них имеется общий, но противоположный по направлению путь, пройденный лучом (например, они связаны через пи-линию). Следует также отметить, что в то время как лучи должны быть идеально противоположными (то есть, отделены друг от друга углом в «пи» радиан или 180 градусов), противоположные проекции должны быть только достаточно противоположными, таким образом, чтобы точка источника одной из них находилась в области сканирования другой. В некоторых вариантах осуществления определение противоположных проекций может быть основано на модели реализованной траектории.
[0037] Траектория 214A сканирования, которая может представлять собой спираль либо двойную спираль, реализована путем сканирования 201. Траектория 214A сканирования может вызывать вращение и поступательное перемещение образца 204 в вертикальном направлении относительно пары источника и детектора, например, источника 102 и детектора 106. Например, образец 204 может быть установлен на держателе, который обеспечивает вращение и поступательное перемещение вдоль направления Z, например, в вертикальном. В некоторых вариантах осуществления источник и детектор также могут перемещаться, иногда – динамически, в то время как источник вращается. В других вариантах осуществления источник и детектор могут быть неподвижными. Перемещение в Θ (например, вращение) и Z направлениях может выполняться непрерывно, полунепрерывно, либо периодически, и таким же образом могут быть получены проекционные данные. Траектория сканирования 214A может приводить к получению проекционных данных, полученных вдоль линии, которая перемещается вокруг образца 204 по спиральной траектории, которая может называться траекторией источника в системе отсчета, где образец неподвижен. Вследствие этого, может существовать множество противоположных проекций, полученных вокруг образца 204 вдоль траектории сканирования 214A, причем каждая пара противоположных проекций будет иметь связанную пи-линию. Затем пи-линии могут быть использованы для коррекции несовмещения между противоположными проекциями, вызванного, например, неточностью относительного движения образца 204, источника и детектора, путем оптимизации согласованности данных пи-линии для каждой пары противоположных проекций. Хотя несогласованность данных пи-линии не может служить для точной оценки величины несовмещения, оптимизация согласованности пи-линии может уменьшить или устранить несовмещение, что может привести к улучшению изображений образца 204. В других вариантах осуществления согласованность отдельных пи-линий может не использоваться в явном виде, но вместо этого средняя величина согласованности всех пи-линий из упомянутого множества противоположных проекций может позволить получить достаточно гладкую функцию, например, несовмещения, усредненного по всем пи-линиям, которое может быть оптимизировано для коррекции несовмещения, связанного со всеми проекциями одновременно. В другом варианте осуществления каждая проекция может быть совмещена (скорректирована) отдельно путем максимизации согласованности упомянутого множества пи-линий, связанных с этой проекцией, и совмещения, улучшенного путем итерации по всем проекциям и последующего многократного повторения этой операции. Несовмещение может быть затем уменьшено или устранено за счет совмещения пи-линий, например, путем поступательного перемещения одной или обеих противоположных проекций для совмещения пикселей для их пи-линии, изменения проекций посредством увеличения, то есть масштабирования, или путем представления несовмещения в виде измененной траектории сканирования, которая также может приводить к соразмерному сдвигу пикселей пи-линии (пиксельных данных пи-линии). В некоторых вариантах осуществления для учета несовмещения и/или несогласованности может быть изменена оценка траектории сканирования.
[0038] Сканирование 203 может быть получено на основе либо траектории сканирования 214В либо 214С, причем обе траектории являются примером заполняющих пространство ПК траекторий сканирования. Траектории сканирования 214B и 214C показаны в виде упорядоченной совокупности точек, разнесенных вокруг образца 204. Точки обозначают местоположения, из которых были получены проекции. Две траектории сканирования 214B и 214C являются вариантами друг друга и не обязательно отличаются друг от друга. Например, траектория сканирования 214С можно охарактеризовать как асимметрическую версию 214В. Конечно, также другие параметры и схемы расположения совокупности точек возможны и предполагаются в данном документе. Траектории сканирования 214B и 214C могут называться заполняющими пространство траекториями, поскольку они образуют упорядоченную совокупность точек, в которых получают проекции с области поверхности образца 204, а не вдоль непрерывной линии вокруг образца 204, каковой является траектория 214A. По отношению к противоположным парам проекций траектории сканирования 214B и 214C могут привести к большему числу противоположных проекций за счет пространственного расположения траекторий сканирования. Вследствие этого, вероятно, имеется большее число противоположных пар проекций, имеющих по меньшей мере одну пи-линию, чем в случае траектории сканирования 214А, что может быть связано скорее с более равномерным (например, более изотропным) распределением пи-линий, чем с общим числом проекций.
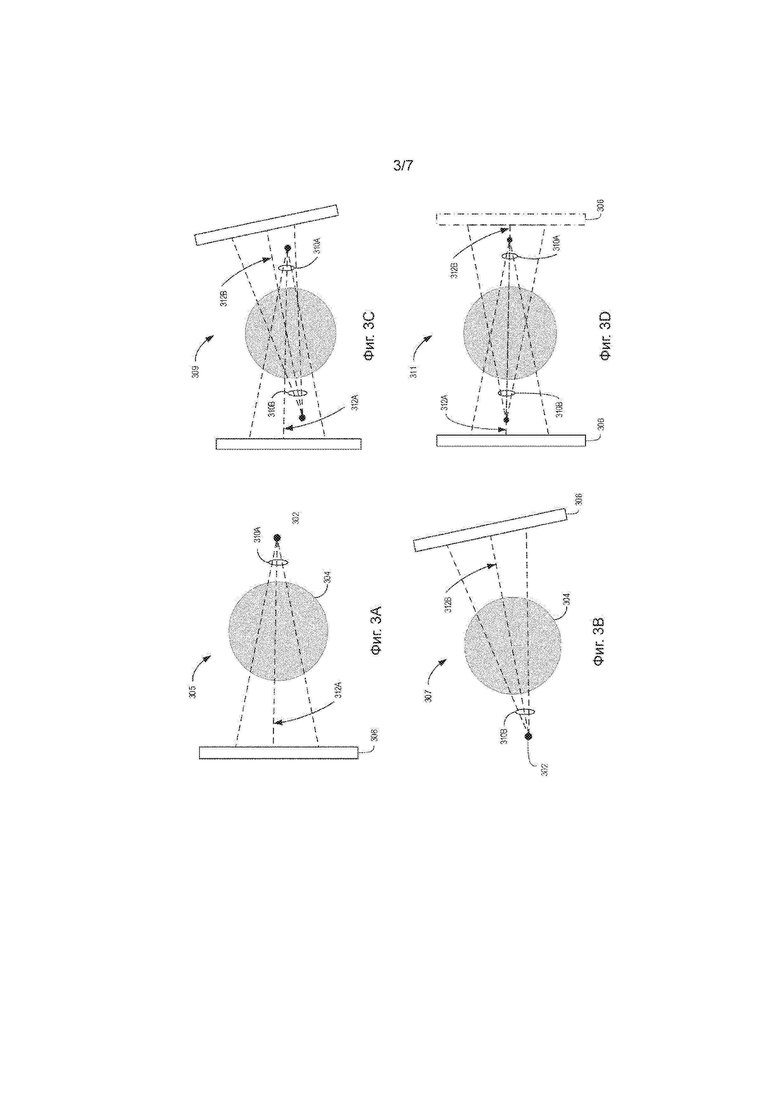
[0039] Фиг. 3А и 3В представляют собой схемы проекций сканирования КТ в горизонтальной плоскости – 305 и 307, соответственно, согласно варианту осуществления настоящего раскрытия. Проекции сканирования КТ 305 и 307 могут быть получены системой 100, например, во время единичного сканирования КТ. Проекции 305 и 307 могут быть получены с использованием любой из траекторий сканирования, рассмотренных на фиг. 2, таких как спиральная, двойная спиральная и ПК. Однако для получения проекций 305 и 307 может быть реализована любая траектория сканирования. Проекции сканирования КТ 305 и 307 могут быть получены для образца 304 с использованием рентгеновских лучей 110А и 110В, проходящих сквозь образец 304 из источника 302 и падающих на детектор 306. Рентгеновские лучи 110А, 110В могут быть параллельными, конусообразными или веерообразными, что может зависеть от расположения детектора в некоторых вариантах осуществления. Форма рентгеновского излучения, падающего на образец, не является ограничивающим аспектом для настоящего изобретения. Отдельные рентгеновские лучи для сканирований КТ 305 и 307 могут распространяться вдоль отдельных путей или следов от источника 302 через образец 304 и попадать на детектор 306.
[0040] Проекции 305 и 307 могут быть получены с противоположных сторон образца 304, например, они могут являться противоположными проекциями, имеющими связанные пи-линии и данные пи-линий для каждой из противоположных проекций, которые также могут называться линейными проекциями. На основе модели реализованной траектории сканирования, например заполняющей пространство ПК траектории или траектории линейного типа, система 100 может определить, что проекции 305 и 307 являются проекциями на пи-линии (противоположными проекциями), например, что имеется по меньшей мере один луч из каждой проекции, который проходит по тому же пути через образец 304 и проходит через виртуальное пространство местоположения источника 302 на другой проекции. Тем не менее, из-за неточного перемещения держателя, источника или детектора, проекции пи-линии могут быть не совмещены, как показано на фиг. 3C. Исключительно в иллюстративных целях показано, что средний ход рентгеновского луча 312А для проекции 305 и ход рентгеновского луча 312В для проекции 307 могут быть предполагаемыми пи-линиями. Как показано на фиг. 3С, комбинация проекций 309 не совмещена, на что указывают два хода рентгеновских лучей 312А и 312В, которые не проходят по одному и тому же пути через образец 304, и не попадают на источник 302 в противоположной проекции. Величина сдвига, которая может быть связана со сдвигом вращения, преувеличена в иллюстрационных целях.
[0041] В дополнение к несовмещению связанные пи-линии могут быть не согласованы из-за флуктуаций или несогласованности интенсивности источника и/или его спектрального состава. Хотя эта несогласованность может и не проявляться в качестве несовмещения, несогласованность может привести к разности в пиксельных данных пи-линии, которая также может быть откорректирована с помощью раскрытого способа.
[0042] После совмещения двух проекций 305 и 307, как показано для комбинации проекций 311 на фиг. 3D, пи-линии 312A и 312B совмещены. Эти две проекции могут быть совмещены за счет поступательного перемещения, поворота или увеличения одной или обеих проекций 305 и 307, либо путем изменения моделируемой траектории сканирования, например, за счет смещения местоположения источника. Степень совмещения может быть определена из величины несовмещения и/или величины несогласованности между данными пи-линии, что также может повлиять на выполненные корректирующие действия. Если несовмещение велико, например, в случае ошибок, превышающих пять пикселей детектора, совмещение может быть проведено путем смещения местоположения источника и проекции. Перемещение как источника, так и детектора может называться «изменением моделируемой траектории сканирования». Как показано на фиг. 3D, контур правого детектора 306 очерчен точечно/пунктирной линией с тем, чтобы указать на факт смещения проекции, а не только местоположения источника. Если величина несовмещения мала, например, менее чем примерно пять пикселей, совмещение может быть выполнено путем смещения только проекции, например за счет смещения детектора.
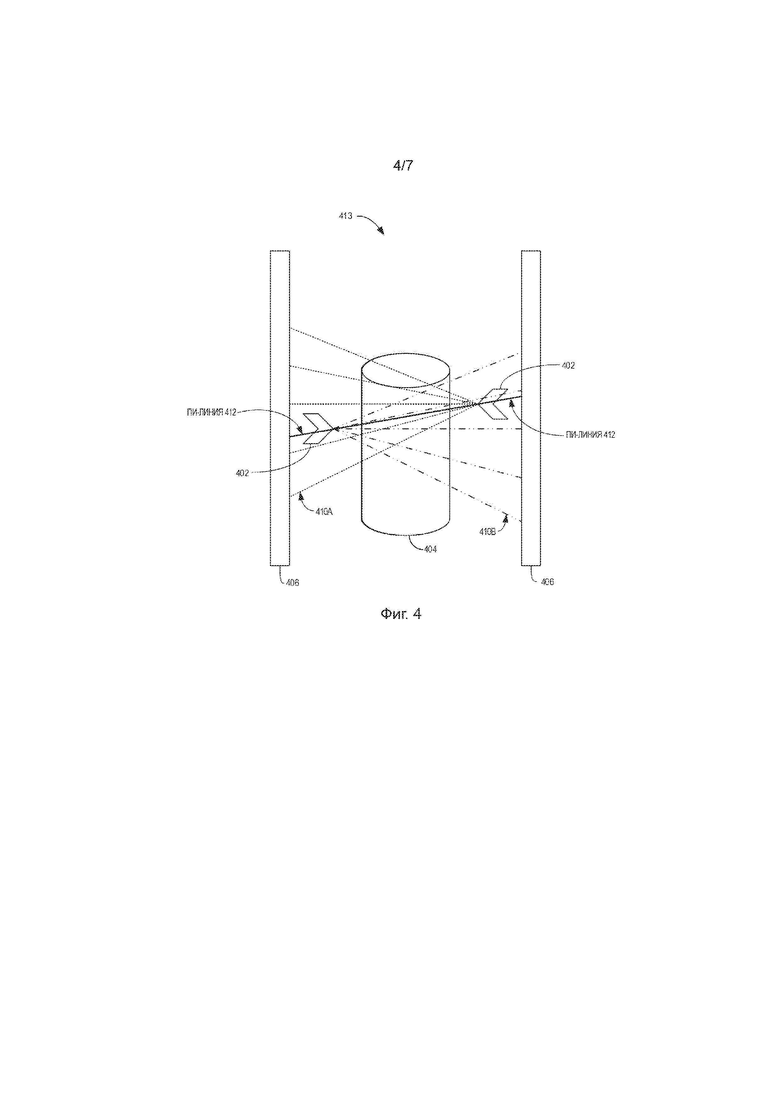
[0043] Фиг. 4 представляет собой схематическое изображение комбинации 413 двух проекций пи-линии согласно варианту осуществления изобретения по настоящему раскрытию. Комбинация 413 содержит пару проекций пи-линии, полученных в процессе КТ сканирования по желаемой траектории сканирования. В некоторых вариантах осуществления траектория сканирования может представлять собой спиральную или двойную спиральную траекторию, которая сочетает вращение и перемещение вдоль направления Z. Вследствие этого пара проекций пи-линии может быть получена из различных по высоте местоположений относительно образца 404. Конечно, могут быть реализованы также и другие траектории сканирования. Хотя высоты двух проекций могут отличаться, тем не менее, может существовать связанная пи-линия, такая как пи-линия 412. Однако, поскольку две проекции получены в разных местоположениях z, проекционные данные могут не полностью совпадать, хотя могут по меньшей мере иметь общие данные пи-линии 412, что также может быть в общем случае справедливым для любой пары проекций пи-линии, в которых точки источника не разделены углом, равным точно 180º. Конечно, проекционные данные для обеих проекций могут содержать дополнительные элементы образца 404.
[0044] Первая проекция может содержать рентгеновские лучи 410A, а противоположная проекция может содержать рентгеновские лучи 410B. Как показано на фиг. 4, пи-линия 412 проходит одинаковый путь через образец и проходит через местоположение источника для каждой проекции. На основе модели реализованной траектории система КТ будет знать пиксели или окрестность пикселей детектора 406, связанные с данным пи-линии для каждой проекции. Если проекции совмещены, проекционные данные пикселей должны быть равными, поскольку рентгеновские лучи пройдут одинаковый путь через образец 404, тем самым получая одинаковое ослабление. Однако, если проекции не совмещены, пиксельные данные будут разными, что указывает на несовмещение.
[0045] Затем система КТ может определить необходимое поступательное перемещение, поворот и/или увеличение по меньшей мере для одной из проекций с целью минимизации или устранения разности в пиксельных данных, тем самым совмещая две проекции. В альтернативном варианте система может допускать возмущения на моделируемой траектории источника.
[0046] На фиг. 5А-5С представлена пара проекций 515 и 517 согласно варианту осуществления изобретения по настоящему раскрытию. Проекции 515 и 517, как показано на фиг. 5А и 5В, могут быть получены из одного КТ сканирования и в некоторых вариантах осуществления могут представлять собой проекции пи-линии. Проекции 515 и 517 могут быть получены, например, с использованием заполняющей пространство ПК траектории. Проекции 515 и 517 пи-линии могут быть не совмещены на величину, показанную на фиг. 5С. Несовмещение 520 может быть вызвано зависимым от времени несовмещением, возникающим, например, в процессе КТ сканирования проекций 515 и 517. Кроме того, проекции пи-линии 515 и 517 могут страдать от флуктуаций интенсивности источника и/или его спектрального состава, что влияет на согласованность пиксельных данных данной пи-линии.
[0047] Проекция 515 содержит элементы 518 и пи-линию 512А, представленные на компоненте изображении 516А образца 504. Компонента изображения 516A образована рентгеновскими лучами 510A, генерируемыми источником 502 и падающими на детектор 506 после прохождения через образец 504. Компонента изображения 516А может быть получена из исходных или практически исходных пиксельных данных. Практически исходные пиксельные данные могут представлять собой, например, исходные пиксельные данные, откорректированные для яркого или темного поля, но также могут быть предварительно обработаны, как было рассмотрено выше. Проекция 517 может приводить к компоненте изображения 516B, которая содержит элементы 518 и пи-линию 512B.
[0048] На фиг. 5С представлено несовмещение 520 в виде перекрывающихся проекций 515 и 517. Как показано, несовмещение 520 может содержать в себе компоненты вращения, увеличения и поступательного перемещения. Точка или пиксель 512, связанные с пи-линиями 512A, B, определяются как соответствующие пи-линиям исходя из модели траектории. Разность в пиксельных значениях для пи-линий 512A, B может быть использована для минимизации этой разности, что также может приводить к уменьшению или устранению несовмещения 520 и/или к высшей степени приближения для выявленного несовмещения 520. В результате этого проекции 515 и 517 могут быть совмещены, а качество любой реконструкции может быть улучшено.
[0049] В некоторых вариантах осуществления величина несовмещения/несогласованности может влиять на выполненную коррекцию. Например, если несовмещение 520 мало, например, около пяти пикселей, то проекции могут перекрываться в разумном приближении. Однако если несовмещение 520 является значительным, например, большим чем примерно 5 пикселей, то несовмещения может быть не скорректировано путем геометрического преобразования. В этом случае угол сканирования также может изменяться относительно идеальной траектории, и поэтому проекции 515 или 517 могут отличаться от идеальных проекций. Если данные пи-линии содержат несогласованности из-за флуктуаций источника, корректирующее действие может включать, например, увеличение одной или обеих проекций.
[0050] Фиг. 6 описывает примерный способ 621 совмещения проекций КТ сканирований на основе пи-линий согласно варианту осуществления изобретения раскрытому в данном документе. Способ 621 может быть выполнен системой КТ, такой как система КТ 100. Способ 621 может начинаться с выполнения этапа 623, который включает в себя получение множества проекций образца, причем каждую проекцию из упомянутого множества получают в различном местоположении вокруг образца на основе траектории. Траектория может быть, например, кольцевой, спиральной, двойной спиральной или заполняющей пространство ПК. Проекции могут отображать данные ослабления для каждого рентгеновского луча, проходящего через образец и падающего на детектор. Пиксели детектора могут быть связаны с рентгеновскими лучами, некоторые из которых проходят через образец, что приводит к получению данных ослабления, например в качестве данных изображения.
[0051] После этапа 623 процесса может следовать этап 625 процесса, который включает определение пар противоположных проекций из упомянутого множества проекций на основе соответствующей пи-линии. Этап 625 процесса в некоторых вариантах осуществления может включать определение поднабора из всех наборов противоположных проекций на основе связанных пи-линий, при этом могут быть определены не все противоположные проекции. Как правило, каждое сканирование может приводить к получению большого числа противоположных проекций, например, к множеству проекций пи-линий.
[0052] После этапа 625 процесса может следовать этап 627 процесса, который включает определение данных пикселей, соответствующих пи-линиям, на основе модели траектории. Система, основанная на модели траектории, может определять, какие пиксели соответствуют пи-линиям противоположных пар проекций. Дополнительно способ 621 может определять, какой пиксель соответствует пи-линии по каждой проекции из упомянутого множества проекций пи-линий. Следует отметить, что изобретение не ограничивается определением данных одного или всех пикселей, и в некоторых вариантах осуществления может быть определен поднабор проекций пи-линий и связанных пиксельных данных. В то время как утверждается, что данные могут относиться к пикселю, также возможно, что может потребоваться интерполяция пиксельных данных с использованием соседних пикселей в случае, когда луч вдоль пи-линии падает на детектор между пикселями, а не на сам пиксель непосредственно. Этап 627 процесса может представлять собой часть этапа 625 процесса.
[0053] После этапа 627 процесса может следовать этап 629 процесса, который включает определение величины несогласованности между данными соответствующей пи-линии для каждой пары противоположных проекций, причем несогласованность указывает на то, что либо противоположные проекции, например проекции пи-линии, несовмещены, либо имеет место несогласованность источника. В некоторых вариантах осуществления несогласованность может быть определена на основе данных ослабления, связанных с данными пи-линии для каждой проекции в каждой паре противоположных проекций. Например, для каждой проекции из пары проекций могут сравниваться пиксельные данные, связанные с пи-линией, для определения отличаются ли они, и если да, то насколько сильно отличаются. Исходя из наличия разности, система может определить наличие несовмещения проекций, которое может включать в себя величину смещения при вращении, увеличении и поступательном перемещении. Хотя величина несовмещения не может быть определена из несогласованности пи-линий, например, из разности в пиксельных данных пи-линии, уменьшение или устранение несогласованности может привести к уменьшению или устранению несовмещения. Дополнительно способ 621 может повторять действия по этапу 627 для каждой проекции пи-линии из упомянутого множества проекций пи-линий с целью определения связанного несовмещения для каждой проекции из упомянутого множества проекций пи-линий.
[0054] После этапа 629 процесса может следовать этап 631 процесса, который включает совмещение каждой пары противоположных проекций путем минимизации разности данных на детекторе, связанных с пи-линиями для каждой пары противоположных проекций. В некоторых вариантах осуществления все идентифицированные проекции пи-линий, например упомянутое множество проекций пи-линий, демонстрирующих несовмещение и/или несогласованность, могут быть одновременно или итеративным способом совмещены с целью минимизации общей разности данных детектора, полученных от большого числа (наиболее вероятно, более 100000) пи-линий сканирования.
[0055] Фиг. 7 представляет собой примерную функциональную блок-схему системы КT 700 согласно варианту осуществления изобретения по настоящему раскрытию. Система КТ 700 может представлять собой пример системы КТ 100 и может использоваться для получения КТ сканирований образцов и выдачи реконструкций различных срезов и объемов образца. Система КТ 700 может по меньшей мере содержать контроллер 720, память 522, держатель 724, программы 726, детектор 728 и источник 730. В общем случае система КТ 700 может выполнять сканирование образцов, как описано в данном документе.
[0056] Контроллер 720 может представлять собой микроконтроллер, ЦП с одним или более вычислительными ядрами или тому подобное. Контроллер 720 может осуществлять управление различными аспектами системы КТ 700 и может быть подсоединен для приема данных от и выдачи сигналов управления к другим различным компонентам системы КТ 700. Например, контроллер 720 может исполнять программные коды, сохраненные в программах 726, чтобы заставлять систему КТ 700 выполнять сканирования КT с использованием желаемой траектории и определять проекций пи-линий на основе модели траектории. Дополнительно, на основе связанных пиксельных данных для пи-линий система 700 может определять величину несогласованности между проекциями пи-линий, если таковое имеется, и минимизировать любую разность для коррекции несогласованности. Кроме того, данные сканирования, полученные детектором 728, могут быть выданы на контроллер 720. В ответ на это контроллер 720 может выполнять алгоритмы обработки данных для получения КТ сканирований, проекции и т.п. Алгоритмы, как было отмечено, могут являться частью программ 726.
[0057] Память 722 может быть энергозависимой или энергонезависимой памятью, подсоединенной для хранения данных и команд. Программы 726, которые могут быть частью памяти 722, могут содержать управляющие команды и программные коды для выполнения различных задач системы КТ 700, таких как управление держателем, источником и детектором, а также различными другими вспомогательными компонентами.
[0058] Держатель 724 может поддерживать образец и обеспечивать его перемещение в ответ на сигналы управления, выдаваемые контроллером 720. Управляющие сигналы могут быть сгенерированы контроллером 720 при исполнении команд управления держателем, сохраненных в памяти 722 и/или программ 726. Например, программы управление держателем может вызывать перемещение держателя в соответствии с желаемой траекторией, такой как, например, спираль, двойная спираль или заполняющая пространство ПК.
[0059] Детектор 728 может обнаруживать рентгеновские лучи, прошедшие через образец, и регистрировать их интенсивность. Интенсивность рентгеновских лучей может уменьшаться вследствие ослабления при прохождении через образец. Величина ослабления может служить в качестве данных, используемых для визуализации образца и получения реконструкций. Данные изображения или данные сканирования могут быть выданы на контроллер 720 для обработки или сохранены в памяти 722 для последующей обработки. Кроме того, детектор 728 может перемещаться в ответ на управляющие сигналы контроллера 720.
[0060] Источник 730 подает рентгеновские лучи на образец и может управляться контроллером 720. Например, источник 730, в ответ на управляющие сигналы контроллера 720, может испускать рентгеновские лучи с желаемой интенсивностью и также может перемещаться относительно образца.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРРЕКЦИЯ УВЕЛИЧЕНИЯ ЖЕСТКОСТИ РЕНТГЕНОВСКОГО ИЗЛУЧЕНИЯ ПРИ ТОМОГРАФИЧЕСКОЙ РЕКОНСТРУКЦИИ С ИСПОЛЬЗОВАНИЕМ МОДЕЛИ ОСЛАБЛЕНИЯ АЛЬВАРЕСА-МАКОВСКИ | 2019 |
|
RU2770544C2 |
| СПОСОБ ИССЛЕДОВАНИЯ С ПОМОЩЬЮ КТ И УСТРОЙСТВО ДЛЯ КТ | 2015 |
|
RU2619839C1 |
| Способ автокалибровки устройства для формирования изображений цифровой томографической реконструкции груди | 2019 |
|
RU2789105C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЯ, СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ И СРЕДА ДОЛГОВРЕМЕННОГО ХРАНЕНИЯ ИНФОРМАЦИИ | 2011 |
|
RU2510080C2 |
| СКАНИРОВАНИЕ В СКВОЗНОМ РЕЖИМЕ | 2007 |
|
RU2452384C2 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ, УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И НОСИТЕЛЬ ДАННЫХ | 2018 |
|
RU2709437C1 |
| ТОМОГРАФИЧЕСКИЙ АППАРАТ И СПОСОБ РЕКОНСТРУКЦИИ ЕГО ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2015 |
|
RU2655091C2 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| УСТРОЙСТВО И СПОСОБ РЕНТГЕНОВСКОГО ОБСЛЕДОВАНИЯ | 2009 |
|
RU2523827C2 |
| ДВУХПРОХОДНАЯ КОРРЕКЦИЯ МЕТАЛЛИЧЕСКОГО АРТЕФАКТА С КОМПЕНСАЦИЕЙ ДВИЖЕНИЯ ДЛЯ ИЗОБРАЖЕНИЙ СРЕЗОВ КОМПЬЮТЕРНОЙ ТОМОГРАФИИ | 2012 |
|
RU2605519C2 |
Группа изобретений относится к медицине. Способ коррекции несовмещения системы компьютерной томографии, включающий: получение проекций образца, причем каждую проекцию из упомянутых проекций получают в различном местоположении вокруг образца на основе траектории; определение пар противоположных проекций из упомянутых проекций на основе соответствующей пи-линии; определение величины несогласованности между данными соответствующей пи-линии для каждой пары противоположных проекций, причем данные пи-линии основаны по меньшей мере частично на данных детектора; и совмещение каждой пары противоположных проекций путем минимизации разности данных детектора, связанных с соответствующими пи-линиями, для каждой пары противоположных проекций. Причем для каждой пары противоположных проекций смещают местоположение и/или ориентацию детектора и/или местоположение источника до тех пор, пока не минимизируется разность данных детектора между парой противоположных проекций. Система компьютерной томографии содержит источник для выдачи рентгеновских лучей; детектор для обнаружения рентгеновских лучей, прошедших через образец или вокруг него; и контроллер, выполненный с возможностью управления источником и детектором. Причем контроллер дополнительно содержит программный код для выполнения способа. Применение данной группы изобретений позволит повысить эффективность коррекции рассогласования системы компьютерной томографии. 2 н. и 25 з.п. ф-лы, 7 ил.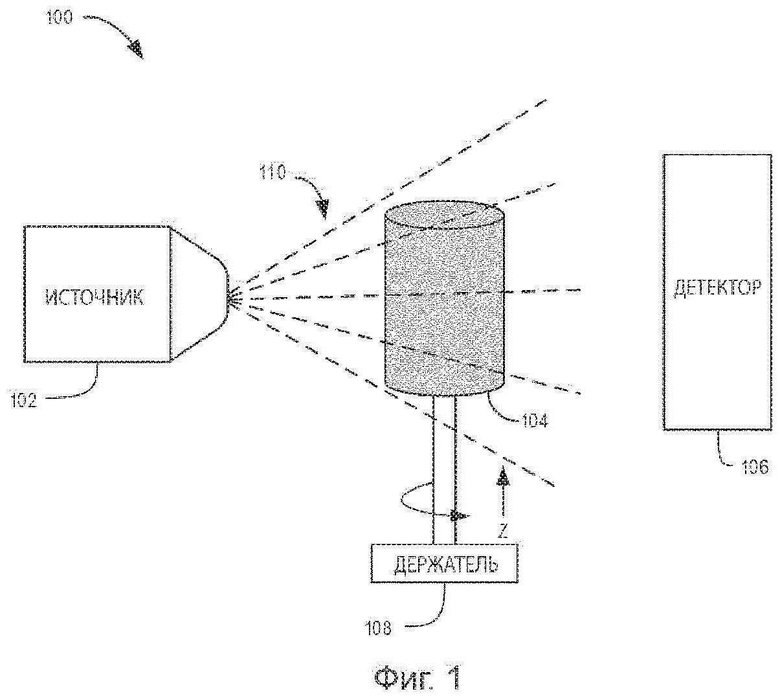
1. Способ коррекции несовмещения системы компьютерной томографии, включающий:
получение проекций образца, причем каждую проекцию из упомянутых проекций получают в различном местоположении вокруг образца на основе траектории;
определение пар противоположных проекций из упомянутых проекций на основе соответствующей пи-линии;
определение величины несогласованности между данными соответствующей пи-линии для каждой пары противоположных проекций, причем данные пи-линии основаны по меньшей мере частично на данных детектора; и
совмещение каждой пары противоположных проекций путем минимизации разности данных детектора, связанных с соответствующими пи-линиями, для каждой пары противоположных проекций, причем для каждой пары противоположных проекций смещают местоположение и/или ориентацию детектора и/или местоположение источника до тех пор, пока не минимизируется разность данных детектора между парой противоположных проекций.
2. Способ по п. 1, причем определение величины несогласованности между данными соответствующей пи-линии для каждой пары противоположных проекций включает определение разности между данными детектора для пи-линии, связанной с каждой проекцией каждой пары противоположных проекций.
3. Способ по п. 2, причем данные детектора для пи-линии, связанной с обеими проекциями каждой пары противоположных проекций, основаны на данных из пикселя детектора или интерполированных данных из двух или более соседних пикселей детектора.
4. Способ по п. 1, причем пи-линия представляет собой траекторию луча, связанную с обеими проекциями каждой пары противоположных проекций, которая проходит одинаковый путь через образец и местоположение источника для обеих проекций каждой пары противоположных проекций.
5. Способ по п. 1, причем данные детектора представляют собой первичные данные по интенсивности.
6. Способ по п. 1, причем данные детектора представляют собой первичные данные по интенсивности, прошедшие один или более этапов предварительной обработки.
7. Способ по п. 6, причем упомянутые один или более этапов предварительной обработки включают коррекцию для светлого поля.
8. Способ по п. 6, причем упомянутые один или более этапов предварительной обработки включает коррекцию для темного поля.
9. Способ по п. 1, причем несогласованность возникает в результате несовмещения между противоположными парами проекций, изменений интенсивности источника или их сочетания.
10. Способ по п. 1, причем траекторию выбирают из одной из спиральной, двойной спиральной и заполняющей пространство кривых (ПК).
11. Способ по п. 1, причем минимизация разности данных детектора, связанной с пи-линией, включает реагирование на величину несогласованности выше порогового значения, причем разность данных детектора, связанную с пи-линией, минимизируют путем смещения местоположения источника и проекции; и реагирование на величину несогласованности ниже порогового значения, причем разность данных детектора, связанную с пи-линией, минимизируют путем смещения только проекции.
12. Способ по п. 1, причем минимизация разности данных детектора, связанной с пи-линией, дополнительно включает поступательное перемещение, вращение или увеличение одной или обеих противоположных проекций.
13. Способ по п. 11, причем совмещение каждой пары противоположных проекций включает итеративную минимизацию несогласованности между данными соответствующей пи-линии каждой пары противоположных проекций.
14. Способ по п. 11, причем совмещение каждой пары противоположных проекций включает совместную минимизацию несогласованности пи-линий для каждой пары противоположных проекций.
15. Система компьютерной томографии, содержащая:
источник для выдачи рентгеновских лучей;
детектор для обнаружения рентгеновских лучей, прошедших через образец или вокруг него; и
контроллер, выполненный с возможностью управления источником и детектором, причем контроллер дополнительно содержит программный код, который, будучи исполняемым контроллером, заставляет контроллер:
получать проекции образца, причем каждая проекция из упомянутых проекций получается в различном местоположении вокруг образца на основе траектории;
определять пары противоположных проекций из упомянутых проекций на основе соответствующей пи-линии;
определять величину несогласованности между данными соответствующей пи-линии для каждой пары противоположных проекций, причем данные пи-линии основаны по меньшей мере частично на данных детектора; и
совмещать каждую пару противоположных проекций путем минимизации разности данных детектора, связанных с соответствующим пи-линиями, для каждой пары противоположных проекций, причем для каждой пары противоположных проекций смещается местоположение и/или ориентация детектора и/или местоположение источника до тех пор, пока не минимизируется разность данных детектора между парой противоположных проекций.
16. Система компьютерной томографии по п. 15, причем программный код, который заставляет контроллер определять величину несогласованности между данными соответствующей пи-линии для каждой пары противоположных проекций, дополнительно содержит программный код, который, будучи исполняемым, заставляет контроллер определять разность между данными детектора для пи-линии, связанной с каждой проекции каждой пары противоположных проекций.
17. Система компьютерной томографии по п. 15, причем данные детектора для пи-линии, связанной с обеими проекциями каждой пары противоположных проекций, основаны на данных из пикселя детектора или интерполированных данных из двух или более соседних пикселей детектора.
18. Система компьютерной томографии по п. 15, причем пи-линия представляет собой траекторию луча, связанную с обеими проекциями каждой пары противоположных проекций, который проходит одинаковый путь через образец и местоположение источника для обеих проекций каждой пары противоположных проекций.
19. Система компьютерной томографии по п. 15, причем данные детектора представляют собой первичные данные по интенсивности.
20. Система компьютерной томографии по п. 15, причем данные детектора представляют собой первичные данные по интенсивности, прошедшие один или более этапов предварительной обработки.
21. Система компьютерной томографии по п. 20, причем упомянутые один или более этапов предварительной обработки включают коррекцию для светлого поля.
22. Система компьютерной томографии по п. 15, причем несогласованность возникает в результате несовмещения между противоположными парами проекций, изменений интенсивности источника или их сочетания.
23. Система компьютерной томографии по п. 15, причем траектория выбрана из одной из спиральной, двойной спиральной и заполняющей пространство кривых (ПК).
24. Система компьютерной томографии по п. 15, причем минимизация разности данных детектора, связанных с пи-линией, включает реагирование на величину несогласованности выше порогового значения, причем разность данных детектора, связанная с пи-линией, минимизируется путем изменения траектории; и реагирование на величину несогласованности ниже порогового значения, причем разность данных детектора, связанная с пи-линией, минимизируется путем смещения только проекции.
25. Система компьютерной томографии по п. 15, причем программный код, который заставляет контроллер минимизировать разность данных детектора, связанную с пи-линией, дополнительно содержит программный код, который, будучи исполняемым, заставляет контроллер поступательно перемещать, вращать или увеличивать одну или обе противоположные проекции.
26. Система компьютерной томографии по п. 24, причем программный код, который заставляет контроллер совмещать каждую пару противоположных проекций, дополнительно содержит программный код, который, будучи исполняемым, заставляет контроллер итеративно минимизировать несогласованность между данными соответствующей пи-линии для каждой пары противоположных проекций.
27. Система компьютерной томографии по п. 24, причем программный код, который заставляет контроллер совмещать каждую пару противоположных проекций, дополнительно содержит программный код, который, будучи исполняемым, заставляет контроллер совместно минимизировать несогласованность пи-линий для каждой пары противоположных проекций.
| US 20110105880 A1, 05.05.2011 | |||
| СПОСОБ ИССЛЕДОВАНИЯ С ПОМОЩЬЮ КТ И УСТРОЙСТВО ДЛЯ КТ | 2015 |
|
RU2619839C1 |
| КОМПЕНСАЦИЯ УСЕЧЕНИЯ ДЛЯ ИТЕРАЦИОННОЙ РЕКОНСТРУКЦИИ В КОМПЬЮТЕРНОЙ ТОМОГРАФИИ (КТ) С КОНИЧЕСКИМ ПУЧКОМ В КОМБИНИРОВАННЫХ СИСТЕМАХ ОФЭКТ/КТ | 2012 |
|
RU2606561C2 |
| US 7848479 B1, 07.12.2010 | |||
| US 7292717 B2, 06.11.2007. | |||

