Настоящее изобретение относится к рабочему устройству для перемещения двух элементов в контакт друг с другом или из контакта, причем, по меньшей мере, один из этих элементов способен перемещаться относительно другого, содержащему рабочий вал, установленный шарнирно относительно рамы, причем указанный вал способен приводиться во вращение между первым положением, соответствующим положению контакта двух элементов, и вторым положением, соответствующим положению, называемому разъединенным положением двух элементов, пружину сжатия, способную сжиматься при помощи указанного вала и действовать на подвижный элемент при снижении сжимающей нагрузки таким образом, чтобы приводить указанный подвижный элемент в положение контакта с неподвижным элементом, и средства для разъединения двух элементов, способные перемещать указанные два элемента в указанное разъединенное положение, причем указанная пружина взаимодействует через один из своих концов, называемый первым концом, с рабочим валом и через другой конец, называемый вторым концом, с подвижной частью.
Рабочее устройство указанного типа известно и описано в документе FR 2609839, причем это устройство управляет разъединением или заземлением. Это устройство содержит рабочий вал, установленный с возможностью вращения относительно рамы и соединенный шарнирно с одним из концов пружины, противоположный конец которой соединен шарнирно с выходным валом, соединенным шарнирно с указанной рамой, и управляет перемещением подвижного элемента.
В этом устройстве заземление выполняется в результате вращения рабочего вала, приводящего к сжатию пружины до тех пор, пока не будет пройдена мертвая точка. Под действием пружины, рабочий вал продолжает свое вращение на несколько градусов, расцепляя фиксирующий ролик при помощи соединительного стержня. При таком расцеплении ролика выходной вал вращается благодаря действию пружины и вызывает разъединение контактов. Во время этого вращения выходного вала последний приводит в движение фиксирующий ролик до тех пор, пока он не войдет в контакт после остановки.
Разъединение заземления достигается в результате вращения в противоположном направлении рабочего вала. Затем, соединительный стержень приводит в движение ролик, который в свою очередь приводит в движение выходной вал.
В механизме этого типа усилие приводной пружины уменьшается в соответствии с ее ходом. Для получения большого усилия при замкнутых контактах или должна быть установлена очень мощная пружина, или должна использоваться стержневая система для приближения мертвой точки, которая требует точной установки размеров и, следовательно, настроечных регулировок.
Кроме того, во время фазы сжатия пружины выходной вал должен удерживаться на месте при помощи системы фиксации в виде ролика и расцепляться при сжатии пружины.
Настоящее изобретение относится к рабочему устройству для перемещения двух элементов в контакт друг с другом и из контакта, которое представляет собой простую конструкцию, обеспечивающую контакт двух элементов со скоростью, независимой от оператора, и большое контактное давление.
Для этого целью настоящего изобретения является создание рабочего устройства для перемещения двух элементов в контакт и из контакта указанного типа, причем это устройство отличается тем, что оно содержит передаточные средства для передачи усилия, оказываемого первым концом пружины, когда происходит снижение сжимающей нагрузки последней, на подвижный элемент так, что указанный подвижный элемент воспринимает два усилия, соответственно приложенных двумя концами пружины, причем результирующее усилие этих двух усилий соответствует этим двум усилиям, обеспечивающим прочное закрепление между указанными двумя элементами.
В соответствии с конкретным вариантом осуществления настоящего изобретения эти передаточные средства содержат приводной стержень, соединенный шарнирно с рабочим валом через один из его концов, называемый первым концом, и соединенный с подвижным элементом через его противоположный конец, называемый вторым концом.
В соответствии с конкретным вариантом настоящего изобретения рабочий вал содержит два конца, расположенных на каждой стороне его оси шарнирного сочленения на раме, при этом пружина соединена шарнирно через ее конец, называемый первым концом, с одним из концов, называемым вторым концом, рабочего вала, и соединена шарнирно через ее конец, называемый вторым концом, с подвижным элементом.
В соответствии с другим конкретным вариантом расстояние, отделяющее ось шарнирного сочленения рабочего вала на раме, с одной стороны, и ось шарнирного сочленения стержня на рабочем валу, с другой стороны, по существу, соответствует расстоянию, отделяющему ось шарнирного сочленения вала на раме и ось шарнирного сочленения первого конца пружины на указанном рабочем валу.
В соответствии с другим конкретным признаком рабочий вал, стержень и пружина имеют такие размеры, что изменение усилий рычагов, когда неподвижный и подвижный элементы приведены в контакт, способно компенсировать уменьшение усилия пружины, когда происходит растяжение последней, так что к подвижному контакту прикладывается постоянное усилие.
В соответствии с другим вариантом указанное устройство может занимать три устойчивых положения, то есть замкнутое положение равновесия, в котором элементы находятся в контакте и пружина находится в состоянии частичного снижения сжимающей нагрузки, разомкнутое положение равновесия, в котором элементы разъединены и пружина находится полностью в сжатом состоянии, и положение прохождения мертвой точки, в котором элементы разъединены и три оси шарнирного сочленения, соответственно стержня на рабочем валу, пружины на рабочем валу и пружины на подвижном контакте, совмещены, в котором направление усилий, передаваемых пружиной, является таким, что крутящий момент не прикладывается к рабочему валу, и положение, за которым пружина начинает приводиться в действие и перемещает рабочий вал и подвижный контакт.
В соответствии с другим вариантом рабочий вал содержит ограничитель, предназначенный для работы совместно со стержнем с целью ограничения перемещения рабочего вала за положение прохождения мертвой точки после операции размыкания.
Другой целью настоящего изобретения является создание электрического защитного устройства, содержащего неподвижный контакт и подвижный контакт, причем подвижный контакт управляется рабочим устройством, включающим указанный один признак или их сочетание.
В соответствии с конкретным признаком настоящего изобретения подвижным контактом является заземляющий контакт.
В соответствии с конкретным признаком заземляющий переключатель обеспечивает включающую способность.
Другие преимущества и признаки настоящего изобретения станут более понятными из последующего подробного описания со ссылкой на сопровождающие чертежи, данные только для иллюстративных целей, на которых:
фиг.1 изображает частичный вид сбоку рабочего устройства электрического устройства в соответствии с настоящим изобретением в разомкнутом положении контактов;
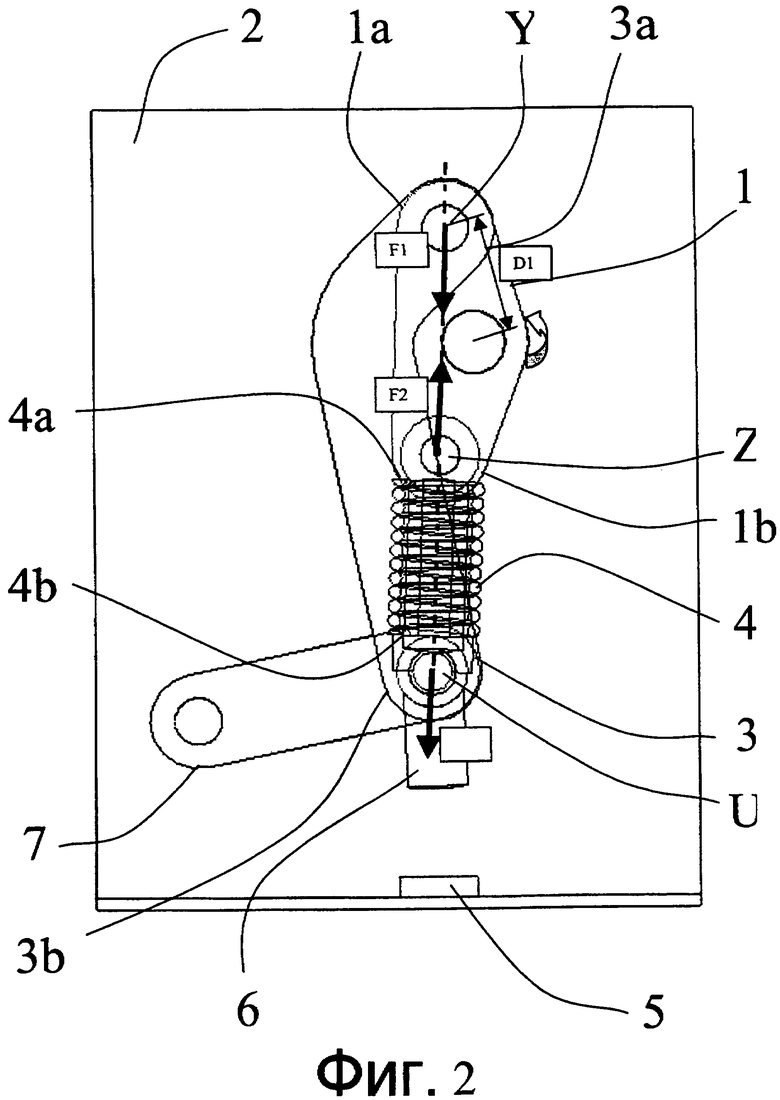
фиг.2 изображает идентичный вид по предыдущему чертежу, причем устройство находится в неустойчивом положении равновесия;
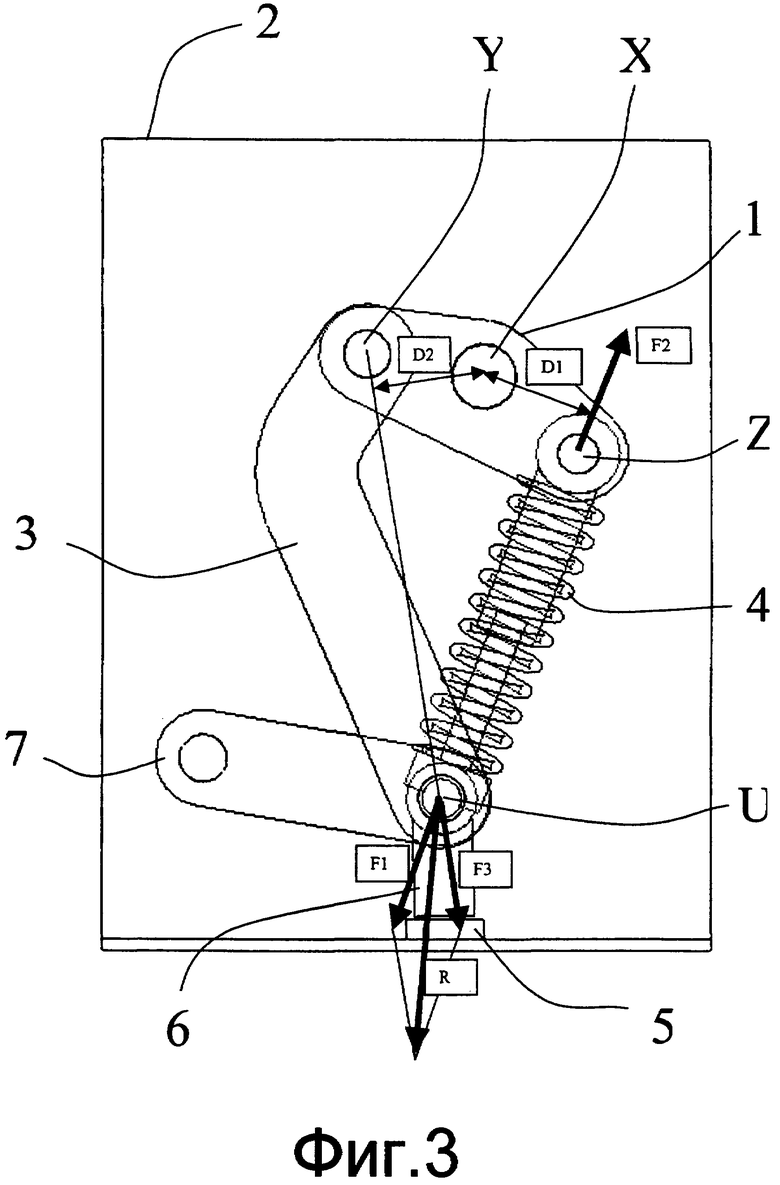
фиг.3 изображает идентичный вид по предыдущим чертежам, причем устройство находится в замкнутом положении равновесия;
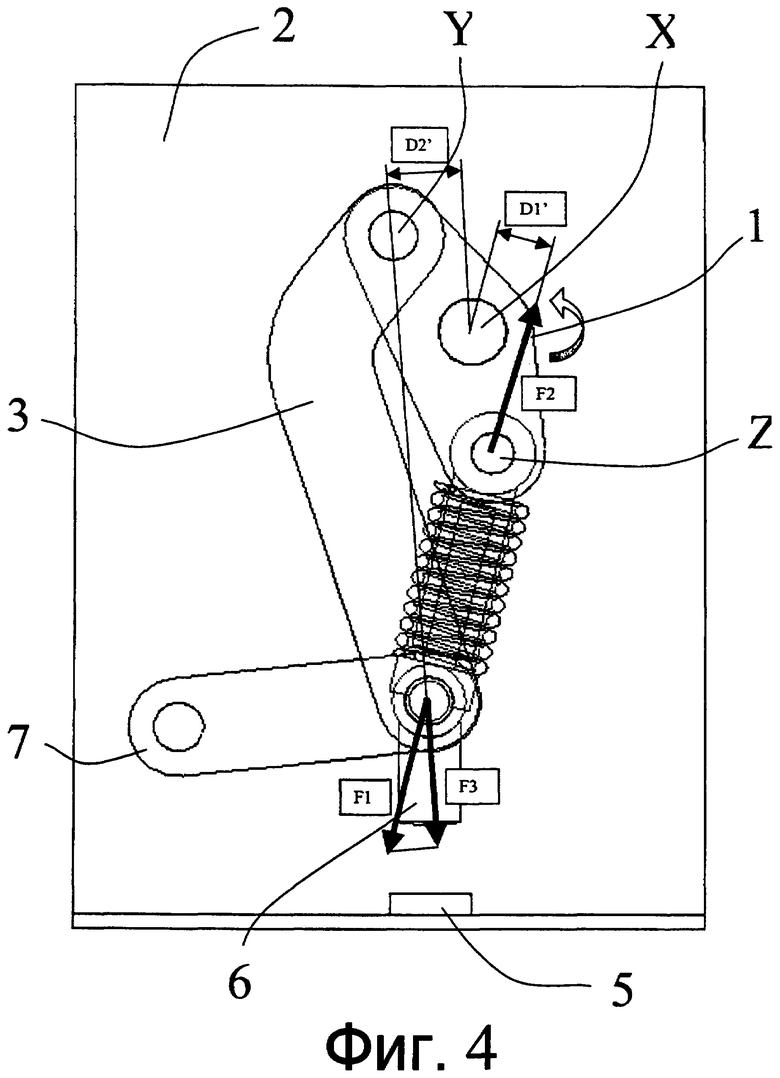
фиг.4 изображает идентичный вид по предыдущим чертежам, причем устройство находится в промежуточном положении между указанным неустойчивым положением равновесия на фиг.2 и замкнутым положением равновесия на фиг.3; и
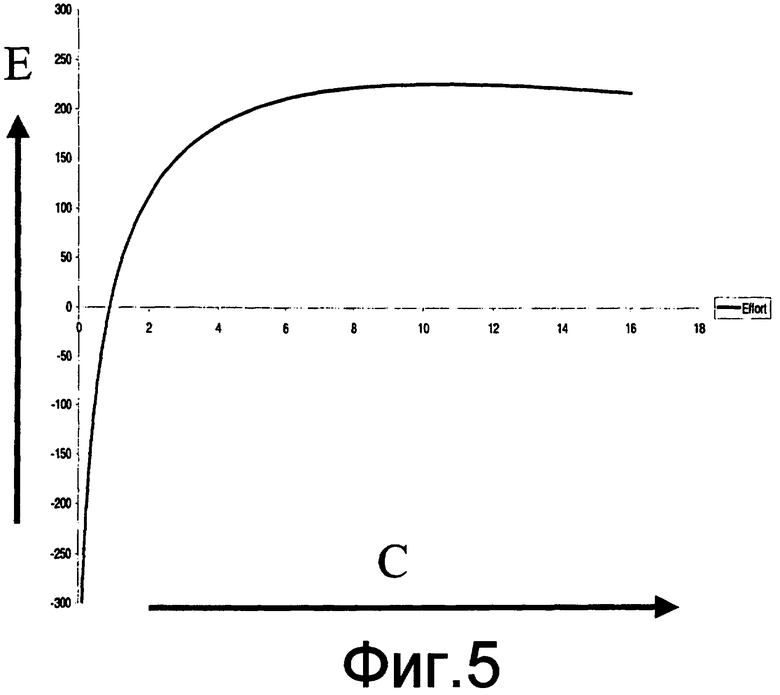
фиг.5 изображает графическое представление, иллюстрирующее движущую силу E в даН (деканьютон), приложенную пружиной к подвижному контакту, в зависимости от перемещения C подвижного контакта в мм.
На фиг.1-4 рабочее устройство O контактов заземляющего переключателя в соответствии с настоящим изобретением содержит рабочий вал 1, соединенный шарнирно вдоль оси X с рамой 2. Этот рабочий вал также соединен шарнирно (на Y) через один 1a из его концов с одним 3a из концов приводного стержня 3 и через свой противоположный конец 1b (Z) с пружиной 4 сжатия. Этот приводной стержень 3 и пружина 4 сжатия соединены друг с другом шарнирно через их другой конец 3b, 4b с соединительной осью U, причем эта соединительная ось U соединена шарнирно, с одной стороны, с подвижным контактом 6 и, с другой стороны, с направляющим стержнем 7, также соединенным шарнирно с рамой. Неподвижный контакт 5 жестко соединен с рамой для выдерживания удерживающего усилия в закрытом положении двух контактов 5, 6.
Это устройство имеет два устойчивых положения равновесия и неустойчивое положение равновесия. Первым устойчивым положением равновесия является разомкнутое положение, изображенное на фиг.1. В этом положении приводной стержень 3 заблокирован относительно ограничителя 8 размыкания, надежно закрепленного на рабочем валу 1. Вторым устойчивым положением равновесия является замкнутое положение, изображенное на фиг.3. В этом положении подвижный контакт заблокирован относительно ограничителя, образованного неподвижным контактом.
Неустойчивым положением равновесия, изображенным на фиг.2, является положение, в котором три оси шарнирного сочленения, соответственно ось Y шарнирного сочленения стержня 3 на валу 1, ось Z шарнирного сочленения вала 1 на пружине 4 и ось U шарнирного сочленения стержня 3 на подвижном контакте 6, совмещены. В этом положении, называемом положением прохождения мертвой точки, направление усилий, передаваемых пружиной, является таким, что крутящий момент не прикладывается к рабочему валу. Следовательно, устройство может поворачиваться или в разомкнутое положение, или в замкнутое положение.
Во время этих двух фаз поворота устройство работает автономно благодаря действию пружины сжатия, как будет объяснено ниже.
Во время этой автономной работы устройства на рабочий вал действует крутящий момент, создаваемый двумя силами, которые изменяются в соответствии с длиной пружины и в соответствии с изменением усилий рычагов D1', D2' (фиг.4). Это первое усилие, называемое F1, прикладывается непосредственно к нижнему концу 4b пружины 4 и повторно передается на рабочий вал 1 при помощи приводного стержня 3. Второе усилие, называемое F2, является результатом усилия, переданного на рабочий вал 1 верхним концом 4a пружины 4. Это второе усилие повторно передается в направлении F3 на подвижный контакт 6 вследствие усилий D1, D2 двух рычагов.
Когда устройство выходит из положения прохождения мертвой точки, этот крутящий момент, приложенный к рабочему валу, стремится повернуть последний или против часовой стрелки для достижения замкнутого положения, или по часовой стрелке для достижения разомкнутого положения.
Для замыкания контактов из разомкнутого положения, проиллюстрированного на фиг.1, следовательно, должно быть оказано внешнее воздействие для приведения во вращение рабочего вала в направлении против часовой стрелки до тех пор, пока не будет пересечена линия прохождения мертвой точки, положение, проиллюстрированное на фиг.2. При прохождении этого совмещения пружина 4 начинает действовать и приводить вал 1 во вращение все еще в том же самом направлении до тех пор, пока не будет достигнуто замыкание контактов (фиг.3). Это достигается посредством снижения сжимающей нагрузки пружины, которая действует через свои два противоположных конца 4a, 4b, прикладывая два усилия, соответственно F1, действующее на подвижный контакт 6 и на рабочий вал, и F2, действующее на рабочий вал 1 и повторно передаваемое на подвижный контакт стержнем 3.
И, наоборот, для размыкания контактов из замкнутого положения, проиллюстрированного на фиг.3, должно быть оказано внешнее воздействие для поворота рабочего вала 1 до тех пор, пока он не переместится выше положения мертвой точки, проиллюстрированного на фиг.2. В этом положении пружина находится в максимально сжатом состоянии. При прохождении этого положения пружина начинает приводиться в действие и вследствие снижения своей сжимающей нагрузки приводит во вращение рабочий вал до тех пор, пока ограничитель 8 размыкания не войдет в контакт со стержнем, как проиллюстрировано на фиг.1.
Анализ замкнутого положения равновесия на фиг.3 показывает, что устройство, с одной стороны, прикладывает усилие F1 от нижнего конца пружины 4 непосредственно на подвижный контакт 6 и, с другой стороны, передает усилие F2 на подвижный контакт 6 через рабочий вал 1 и приводной стержень 3. Следовательно, результирующее усилие R усилий, приложенных к подвижному контакту, приблизительно, в два раза больше усилия, приложенного первым концом 4a пружины 4.
Кроме того, величина этого результирующего усилия R изменяется незначительно, независимо от положения неподвижного контакта 5 во время последних двух третей перемещения, как проиллюстрировано на фиг.5. Изменение усилий рычагов D1', D2', фактически, не компенсирует уменьшение усилия пружины, когда последняя растянута. Чем больше усилия F1 и F2 уменьшаются, тем больше увеличивается усилие F3.
Следовательно, рабочее устройство, при помощи которого подвижный контакт может перемещаться в положение вплотную с неподвижным контактом со скоростью, независимой от оператора, было выполнено при помощи настоящего изобретения. В конце перемещения, благодаря пружине сжатия, это устройство обеспечивает высокое контактное давление для обеспечения прохождения тока. Система удерживается в разомкнутом положении приводным стержнем, приведенным в контакт с частью, образующей ограничитель рабочего вала под действием пружины сжатия.
Использование усилия обоих концов пружины означает, что может быть использована пружина с меньшим усилием (приблизительно, половина достигаемого контактного усилия).
Так как изменение усилий рычагов, когда происходит замыкание контактов, компенсирует уменьшение усилия пружины во время последних двух третей перемещения, это приводит к усилию, повторно предаваемому на контакты, которое остается постоянным во время большого перемещения.
Это отсутствие изменения усилия в соответствии с перемещением обеспечивает ту же самую величину усилия, независимо от эрозии, уплотнения соединения, проскальзывания, потери подвижности и подобного контактов. Следовательно, это отсутствие изменения усилия в соответствии с перемещением избавляет от необходимости в устройстве для сжатия контактов или устройстве для регулировки положения для вхождения в контакт. Это устройство позволяет свести к минимуму количество элементов и обеспечивает максимальную компактность узла, а также приводит к уменьшению производственных затрат.
Этот принцип особенно подходит для приведения в действие контактов, когда необходимы большие усилия в конце перемещения (например, стыковое соединение контактов), или для всех контактов, требующих переход за установленную позицию для компенсации износа, уплотнения соединения и подобного.
Он применим для всех электрических схем без отключающей способности, особенно в разъединителях.
Этот принцип может использоваться для простого приложения удерживающего усилия (например, загибание фланцев) или прижимного усилия, удерживающего несколько элементов вместе.
Он также хорошо подходит для всех функций заземляющего переключателя с отключающей способностью.
Для других применений его можно соединять с валом для преобразования линейного перемещения на выходе во вращательное движение. Кулачок также может быть соединен с ним для применения усилий, передаваемых в соответствии с конкретными требованиями.
Он также может использоваться, если рабочий вал и приводной стержень ненадежно соединены друг с другом, для всех функций переключения, или даже для прерывателей цепи с установкой фиксации для размыкания.
Настоящее изобретение не ограничивается описанными и проиллюстрированными вариантами осуществления, которые даны только для иллюстративных целей.
Напротив, настоящее изобретение включает все технические эквиваленты описанных средств и их комбинации, если последние достигаются в соответствии с сущностью настоящего изобретения.
Рабочее устройство обеспечивает перемещение двух элементов (5, 6) в контакт и из контакта друг с другом за счет того, что, по меньшей мере, один из этих элементов способен перемещаться относительно другого. Устройство содержит рабочий вал (1), установленный шарнирно относительно рамы (2), вал (1) может приводиться во вращение между первым и вторым положениями, пружину сжатия (4), способную сжиматься при помощи указанного вала (1) и действовать на подвижный элемент (6) при снижении сжимающей нагрузки таким образом, чтобы вводить его в положение контакта с неподвижным элементом (5), и средства для разъединения двух элементов (5, 6), способные перемещать их в разъединенное положение. Пружина (4) взаимодействует через свой первый конец (4а) с рабочим валом (1) и через свой второй конец (4b) с подвижным элементом (6). Устройство содержит также передаточные средства для передачи усилия, приложенного к рабочему валу (1) первым концом (4а) пружины 4, когда происходит снижение сжимающей нагрузки последней, на подвижный элемент (6), так что указанный подвижный элемент (6) воспринимает два усилия, приложенные соответственно двумя концами пружины 4, при этом результирующее усилие обеспечивает прочное закрепление между указанными двумя элементами. Технический результат - приведение двух элементов в контакт со скоростью, независимой от оператора, и обеспечение большого контактного давления. 4 н. и 6 з.п. ф-лы, 5 ил.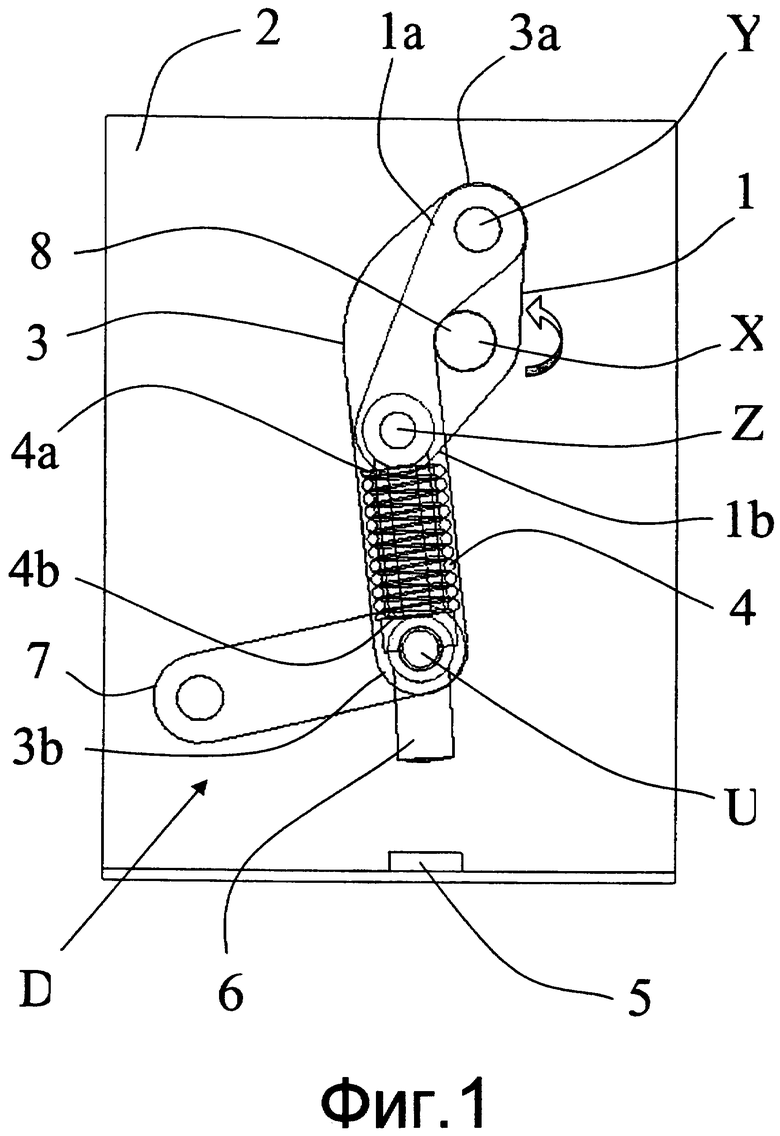
1. Рабочее устройство для перемещения двух элементов в контакт друг с другом или из контакта, причем, по меньшей мере, один из этих элементов способен перемещаться относительно другого, содержащее рабочий вал, установленный шарнирно относительно рамы, причем указанный вал может приводиться во вращение между первым положением, соответствующим положению контакта двух элементов, и вторым положением, соответствующим положению разъединения двух элементов, пружину сжатия, способную сжиматься при помощи указанного вала и действовать на подвижный элемент при снижении сжимающей нагрузки таким образом, чтобы вводить в контакт указанный подвижный элемент с неподвижным элементом, и средства для разъединения двух элементов, способные перемещать указанные два элемента в указанное разъединенное положение, причем указанная пружина взаимодействует на первом конце с рабочим валом и на другом конце с подвижным элементом, отличающееся тем, что содержит передаточные средства (1, 3) для передачи усилия, приложенного на рабочий вал (1) первым концом (4а) пружины (4), когда происходит снижение сжимающей нагрузки последней, на подвижный элемент (6), так что подвижный элемент (6) воспринимает два усилия, приложенные соответственно двумя концами (4а, 4b) пружины (4), причем результирующее усилие двух усилий F1, F2 соответствует этим двум усилиям и обеспечивает прочное закрепление между указанными двумя элементами (5, 6).
2. Рабочее устройство по п.1, отличающееся тем, что передаточные средства содержат приводной стержень (3), соединенный шарнирно с рабочим валом (1) на первом конце (3а) и соединенный с подвижным элементом (6) на своем втором конце (3b).
3. Рабочее устройство по п.2, отличающееся тем, что рабочий вал (1) содержит два конца (1a, 1b), расположенных на каждой стороне его оси Х шарнирного сочленения на раме, при этом пружина (4) соединена шарнирно на своем первом конце (4а) со вторым концом (1b) рабочего вала и соединена шарнирно на втором конце (4b) с подвижным элементом (6).
4. Рабочее устройство по п.3, отличающееся тем, что расстояние, отделяющее ось Х шарнирного сочленения рабочего вала (1) на раме (2) с одной стороны и ось Y шарнирного сочленения стержня (3) на рабочем валу (1) с другой стороны соответствует, по существу, расстоянию, отделяющему ось Х шарнирного сочленения вала (1) на раме (2) и ось шарнирного сочленения первого конца (4а) пружины (4) на указанном рабочем валу (1).
5. Рабочее устройство по любому из пп.2-4, отличающееся тем, что рабочий вал (1), стержень (3) и пружина (4) имеют такие размеры, что изменение действия рычагов D1', D2', когда неподвижный и подвижный элементы (5, 6) приведены в контакт, позволяет компенсировать уменьшение усилия пружины (4), когда происходит растяжение последней, так что к подвижному элементу (6) прикладывается постоянное усилие.
6. Рабочее устройство по п.3 или 4, отличающееся тем, что указанное устройство имеет три устойчивых положения: замкнутое положение равновесия, в котором элементы (5, 6) находятся в контакте, и пружина (4) находится в состоянии частичного снижения сжимающей нагрузки; разомкнутое положение равновесия, в котором элементы (5, 6) разомкнуты, и пружина (4) находится полностью в сжатом состоянии; положение прохождения мертвой точки, в котором элементы (5, 6) разомкнуты, и три оси шарнирного сочленения соответственно, ось Y шарнирного сочленения стержня (3) на рабочем валу (1), ось Z шарнирного сочленения пружины (4) на рабочем валу (1) и ось U шарнирного сочленения пружины (4) на подвижном элементе (6) совмещены в этом положении, при этом направление усилий, передаваемых пружиной (4), является таким, что крутящий момент не прикладывается к рабочему валу (1), и вне этого положения пружина (4) начинает приводиться в действие и перемещает рабочий вал (1) и подвижный элемент (6).
7. Рабочее устройство по любому из пп.2-4, отличающееся тем, что рабочий вал (1) содержит ограничитель (8), предназначенный для работы совместно со стержнем (3) для ограничения вращательного движения рабочего вала (1) за положением прохождения мертвой точки после операции размыкания.
8. Электрическое защитное устройство, содержащее неподвижный контакт (5) и подвижный контакт (6), причем подвижный контакт (6) регулируется рабочим устройством D по любому из пп.1-4.
9. Электрическое защитное устройство, содержащее неподвижный контакт (5) и подвижный контакт (6), причем подвижный контакт (6) является заземляющим контактом и регулируется рабочим устройством D по любому из пп.1-4.
10. Электрическое защитное устройство, являющееся заземляющим переключателем, обеспечивающим включающую способность, содержащее неподвижный контакт (5) и подвижный контакт (6), причем подвижный контакт (6) является заземляющим контактом и регулируется рабочим устройством D по любому из пп.1-4.
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ ГИПЕРЧУВСТВИТЕЛЬНОСТИ К ЯДУ ПЧЕЛЫ (APIS MELLIFERA) | 2016 |
|
RU2609839C1 |
| ПРУЖИННЫЙ ПРИВОД ДЛЯ ВЫСОКОВОЛЬТНОГО КОММУТАЦИОННОГО АППАРАТА | 2005 |
|
RU2291512C1 |
| Устройство для уборки кирпича от пресса | 1939 |
|
SU58585A1 |
| Способ обработки дисперсного материала для создания псевдоожиженного слоя | 1980 |
|
SU1160928A3 |

