Настоящее предлагаемое изобретение относится к области пеленгации и может быть использовано при наведении ракеты на цель
При определении угловых координат ракеты и цели с помощью антенны моноимпульсной системы используется излучение приемоответчика, находящегося на ракете, и отраженный от цели сигнал радиолокатора. При этом частоты излучения приемоответчика и радиолокатора одинаковые по величине.
Радиосигналы от ракеты и цели приходят на антенну моноимпульсной системы и далее поступают на угловые дискриминаторы соответственно ракетного и целевого каналов, представляющие собой устройства измерения угловых координат ракеты и цели.
Предположим, что фазовый центр антенны приемоответчика совпадает с эффективным центром отраженного от цели сигнала, а также частоты излучения приемоответчика и отраженного от цели сигнала равны. В этом случае угловые координаты ракеты и цели, определяемые моноимпульсной системой, должны быть одинаковыми по величине. Но из-за систематических и случайных погрешностей пеленгования ракеты и цели [1] они будут иметь несколько отличные значения. Систематические ошибки являются постоянными или изменяются по определенному закону и могут быть выявлены и устранены путем ввода соответствующих поправок [2].
Отличие в угловых координатах ракеты и цели, когда фазовый центр антенны приемоответчика совпадает с эффективным центром отраженного от цели сигнала, обусловлено некоторым уходом равносигнальных направлений целевого и ракетного каналов моноимпульсной системы от нормального направления [1], что приводит к ошибке наведения ракеты на цель. Следовательно, чтобы скомпенсировать систематические ошибки пеленгования ракеты и цели путем ввода соответствующих поправок в угловые координаты ракеты и цели требуется определить углы между равносигнальными и нормальным направлениями. Аналогичная задача решается при определении разъюстировки электрической оси антенны.
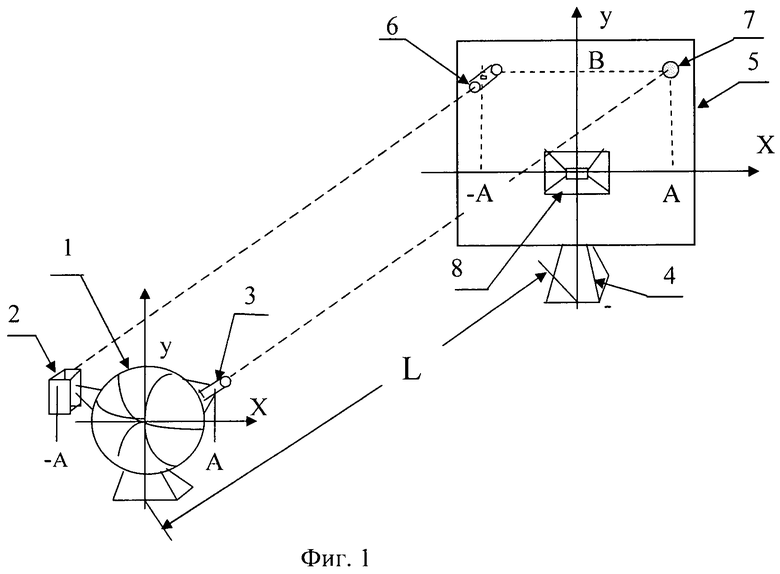
Известен способ определения ошибки пеленгования ракеты моноимпульсной системой (патент РФ №2315328, MПK G01R 29/10), суть которого заключается в следующем: рядом с юстируемой антенной 1 на некотором расстоянии от центра раскрыва антенны устанавливают и жестко связывают с плоскостью раскрыва приемник оптического излучения 2 с координатами -А и В по осям Х и У и оптический прибор 3 с координатами А и В (см. фиг.1) Оптические оси их параллельны между собой. Оси Х и У направлены соответственно по горизонтали и вертикали, а начало координат совпадает с центром раскрыва антенны. На вышке 4, расположенной на определенном расстоянии от антенны 1, устанавливают щит 5, на котором размещают источник оптического излучения 6, геодезическую марку 7 и вспомогательную антенну 8 в качестве излучателя. Источник оптического излучения 6 и геодезическая марка 7 удалены от фазового центра вспомогательной антенны 8 соответственно па расстояния -А, В и А, В по осям X' и У, равные смещениям приемника оптического излучения 2 и оптического прибора 3 от оси антенны 1. Приемником оптического излучения, сигналы с выхода которого пропорциональны угловым координатам источника оптического излучения, может являться оптико-электронный пеленгатор.
С помощью поворотного устройства юстируемой антенны 1 оптическую ось оптико-электронного пеленгатора 2 и линию визирования оптического прибора 3 совмещают соответственно с источником оптического излучения 6 и геодезической маркой 7. Затем с помощью антенны 1 определяют угловые координаты вспомогательной антенны 8. Вычитая из угловых координат вспомогательной антенны соответствующие координаты источника оптического излучения, получают значения разъюстировки электрической оси антенны моноимпульсной системы относительно оптической оси оптико-электронного пеленгатора.
Данный способ юстировки имеет существенный недостаток. Он не позволяет выявить систематические ошибки в определении координат ракеты и цели.
Задачей предлагаемого изобретения является определение систематических ошибок пеленгования ракеты и цели.
Решение поставленной задачи достигается тем, что в способе определения систематических ошибок пеленгования ракеты и цели моноимпульсной системой, включающем размещение на определенном расстоянии от антенны моноимпульсной системы двух оптических приборов, жестко связанных с плоскостью раскрыва антенны, оптические оси которых перпендикулярны плоскости раскрыва, и один из которых является оптико-электронным пеленгатором, наведение линии визирования оптического прибора и оптической оси оптико-электронного пеленгатора соответственно на геодезическую марку и источник оптического излучения, расположенные вместе со вспомогательной антенной на щите, установленном на вышке, новым является то, что второй оптический прибор является тепловизионным пеленгатором, а в качестве геодезической марки используют источник оптического излучения, и оба источника удалены от фазового центра вспомогательной антенны соответственно на расстояния, равные смещениям оптико-электронного и тепловизионного пеленгаторов от центра раскрыва антенны моноимпульсной системы, при этом на заданном расстоянии от вспомогательной антенны устанавливают имитатор движущейся цели, с помощью вспомогательной антенны и имитатора движущейся цели получают пеленгационные характеристики угловых дискриминаторов соответственно ракетного и целевого каналов, по ним, определяя смещения равносигнальных направлений от нормального, получают величины систематических ошибок пеленгования ракеты и цели с учетом различия угловых координат вспомогательной антенны и имитатора движущейся цели.
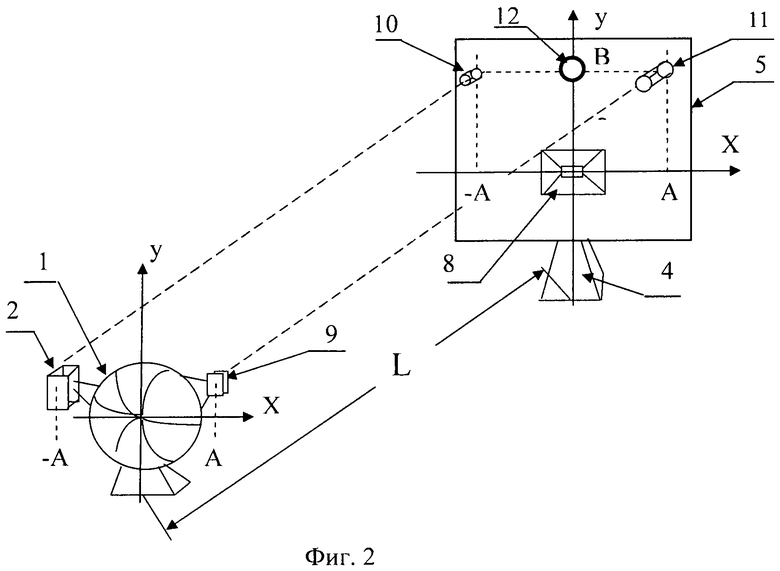
Предлагаемый способ поясняется чертежами, представленными на фиг.2, где: 1 - антенна моноимпульсной системы, 2, 9 - оптико-электронный и тепловизионный пеленгаторы, 4 - вышка, 5 - щит, 10, 11 - источники оптического излучения, 8 - вспомогательная антенна, 12 - имитатор движущейся цели.
Способ определения систематической ошибки пеленгования ракеты и цели с помощью антенны моноимпульсной системы осуществляется следующим образом: рядом с раскрывом антенны моноимпульсной системы 1 на определенном расстоянии от центра раскрыва устанавливают и жестко связывают с плоскостью раскрыва оптико-электронный и тепловизионный пеленгаторы 2, 9 с координатами соответственно -А и А по оси Х и В по оси У. Ось Х направлена по горизонтали, а ось У по вертикали.
На вышке 4, расположенной на определенном расстоянии L от антенны 1, устанавливают щит 5, на котором размещают вспомогательную антенну 8 в качестве излучателя и источники оптического излучения 10, 11, по которым выставляются оптические оси оптико-электронного и тепловизионного пеленгаторов. Источники оптического излучения 10, 11 удалены от фазового центра вспомогательной антенны 8 соответственно на расстояния -А, и A по оси Х и В по оси У, равные смещениям оптико-электронного и тепловизионного пеленгаторов от центра раскрыва антенны 1.
Рядом со вспомогательной антенной устанавливают имитатор движущейся цели 12 (ИДЦ) с координатами Х=О, У=В. ИДЦ представляет собой устройство переизлучения сигналов, имитирующее доплеровский сдвиг частоты принимаемого сигнала от движущейся цели. Доплеровский сдвиг частоты сигнала, приходящего на имитатор цели, осуществляется за счет фазовращателей, управляемых модулятором. Подробное описание работы ИДЦ изложено в патенте РФ на полезную модель №65203/2007.
С помощью поворотного устройства антенны моноимпульсной системы оптические оси оптико-электронного и тепловизионного пеленгаторов 2, 9 совмещают с оптическими излучателями 10, 11. Затем с помощью вспомогательной антенны и ИДЦ получают пеленгационные характеристики угловых дискриминаторов ракетного и целевого каналов. По их пересечению с координатной осью угловых значений определяют смещение равносигнальных направлений от нормального [1] и, вычитая величину arctg B/L из координаты по углу места целевого канала, получают систематические ошибки пеленгования ракеты и цели моноимпульсной системой.
Литература
1. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М., Радиосвязь, 1984 - с.114-163.
2. Неупокоев Ф.К. Стрельба зенитными ракетами. - М., Военное издательство МО СССР, 1980. - с.124-125.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЮСТИРОВОЧНАЯ ВЫШКА | 2009 |
|
RU2406066C1 |
| ЮСТИРОВОЧНЫЙ ЩИТ | 2014 |
|
RU2548690C1 |
| Способ юстировки информационных средств зенитной боевой машины и устройство для юстировки информационных средств зенитной боевой машины | 2017 |
|
RU2670242C1 |
| МОНОИМПУЛЬСНЫЙ ФАЗОВЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2364882C2 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| СПОСОБ ЮСТИРОВКИ АНТЕННЫ МОНОИМПУЛЬСНОЙ СИСТЕМЫ | 2006 |
|
RU2315328C2 |
| СПОСОБ ЮСТИРОВКИ АНТЕННЫ МОНОИМПУЛЬСНОЙ СИСТЕМЫ | 2007 |
|
RU2358270C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПРИЕМНЫХ ДИАГРАММ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ АНТЕННОЙ СИСТЕМЫ И МОНОИМПУЛЬСНАЯ АНТЕННАЯ СИСТЕМА | 2006 |
|
RU2316860C1 |
| СПОСОБ ЮСТИРОВКИ АНТЕННЫ | 2002 |
|
RU2231803C2 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
Изобретение относится к области пеленгации. Достигаемый технический результат - определение систематических ошибок пеленгования ракеты и цели моноимпульсной системой и устранение их путем ввода соответствующих поправок. Указанный результат достигается тем, что на определенном расстоянии от антенны моноимпульсной системы размещают два оптических прибора, жестко связанных с плоскостью раскрыва антенны, оптические оси которых перпендикулярны плоскости раскрыва, и один из них является оптико-электронным пеленгатором (ОЭП), осуществляют наведение линии визирования оптического прибора и оптической оси ОЭП соответственно на геодезическую марку и источник оптического излучения, расположенные вместе со вспомогательной антенной на щите, установленном на вышке, второй оптический прибор является тепловизионным пеленгатором, а в качестве геодезической марки используют источник оптического излучения, при этом на заданном расстоянии от вспомогательной антенны устанавливают имитатор движущейся цели, с помощью вспомогательной антенны и имитатора движущейся цели получают пеленгационные характеристики угловых дискриминаторов целевого и ракетного каналов, по ним, определяя смещения равносигнальных направлений от нормального, получают величины систематических ошибок пеленгования ракеты и цели с учетом различия угловых координат вспомогательной антенны и имитатора движущейся цели. 2 ил.
Способ определения систематических ошибок пеленгования ракеты и цели моноимпульсной системой, включающий размещение на определенном расстоянии от антенны моноимпульсной системы двух оптических приборов, жестко связанных с плоскостью раскрыва антенны, оптические оси которых перпендикулярны плоскости раскрыва, и один из которых является оптико-электронным пеленгатором, наведение линии визирования оптического прибора и оптической оси оптико-электронного пеленгатора соответственно на геодезическую марку и источник оптического излучения, расположенные вместе со вспомогательной антенной на щите, установленном на вышке, отличающийся тем, что второй оптический прибор является тепловизионным пеленгатором, а в качестве геодезической марки используют источник оптического излучения, при этом оба источника удалены от фазового центра вспомогательной антенны на расстояния, соответственно, равные смещениям оптико-электронного и тепловизионного пеленгаторов от центра раскрыва антенны моноимпульсной системы, а на заданном расстоянии от вспомогательной антенны устанавливают имитатор движущейся цели, с помощью вспомогательной антенны и имитатора движущейся цели получают пеленгационные характеристики угловых дискриминаторов целевого и ракетного каналов, по ним, определяя смещения равносигнальных направлений от нормального, получают величины систематических ошибок пеленгования ракеты и цели, с учетом различия угловых координат вспомогательной антенны и имитатора движущейся цели.
| ЮСТИРОВОЧНАЯ ВЫШКА | 2009 |
|
RU2406066C1 |
| СПОСОБ ЮСТИРОВКИ АНТЕННЫ МОНОИМПУЛЬСНОЙ СИСТЕМЫ | 2006 |
|
RU2315328C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПРИЕМНЫХ ДИАГРАММ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ АНТЕННОЙ СИСТЕМЫ И МОНОИМПУЛЬСНАЯ АНТЕННАЯ СИСТЕМА | 2006 |
|
RU2316860C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 1999 |
|
RU2165582C2 |
| Регулируемая ультразвуковая линия задержки на поверхностных акустических волнах | 1990 |
|
SU1818681A1 |
| US 20060328413 A1, 26.10.2006 | |||
| US 20020071038 A1, 13.06.2002. | |||

