Предлагаемое изобретение относится к области военной техники, в частности к зенитным комплексам ближнего рубежа, которые должны обеспечивать надежную противовоздушную оборону мотострелковых и танковых полков защиты Сухопутных войск, а особенно наступающих танков и других объектов бронетехники, а также стационарных объектов от массированных ударов средств воздушного нападения.
Известен зенитный пушечно-ракетный комплекс (ЗПРК) "Тунгуска М1" [1], в котором в одной боевой машине совмещены ракетное и пушечное вооружения, радиолокационные и оптические средства обнаружения, сопровождения и управления огнем с использованием общих для обеспечения пушечной стрельбы и наведения зенитной управляемой ракеты (ЗУР) средств: радиолокационной системы (РЛС) обнаружения, РЛС сопровождения, оптического прицельного оборудования, цифровой вычислительной системы (ЦВС) и приводов наведения вооружения. После обнаружения координаты цели в виде целеуказания передаются на средства сопровождения и обеспечивается захват и сопровождение цели станцией сопровождения цели (ССЦ) или оптическим прицелом. При стрельбе ЗУР применяется сопровождение цели по угловым координатам с помощью оптического прицела путем удержания оператором прицельной марки на цели. После пуска ЗУР попадает в поле зрения оптического ИК-пеленгатора и по световому сигналу от трассера в ИК-пеленгаторе вырабатываются угловые координаты ракеты относительно линии визирования цели. По этим координатам ЦВС вырабатывает команды управления ЗУР, которые поступают в шифратор, где кодируются в импульсные посылки и через передатчик ССЦ передаются на ракету. Такой комплекс не позволяет осуществить пуск одновременно двух ракет по двум целям, имеет недостаточную боевую производительность и становится недостаточно эффективным в условиях современной тактики массированного применения средств воздушного нападения и необходимости отражения плотных налетов. В такой ситуации недостаточная эффективность комплекса может быть компенсирована только за счет увеличения количества комплексов в полку, что является дорогостоящим мероприятием.
Известен также зенитный ракетный комплекс (ЗРК) Rapier 2000 [2]. Он предназначен для защиты стратегических объектов от боевых вертолетов и новейших скоростных самолетов огневой поддержки. Комплекс имеет модульную конструкцию и состоит из трех модулей, каждый из которых размещен на отдельном прицепе. Основным модулем является огневой блок, на котором размещены ЗУР и электронно-оптическая система автоматического сопровождения цели и ракеты.
На втором прицепе размещена трехкоординатная РЛС обзора и обнаружения целей, обеспечивающая поиск, обнаружение и сопровождение целей. На третьем прицепе размещена двухлучевая РЛС сопровождения цели и ракеты. Система управления ЗУР радиокомандная, команды на ракеты передаются через передатчик, входящий в состав РЛС сопровождения, установленной на третьем прицепе.
Благодаря наличию двух параллельно действующих систем наведения: электронно-оптической на первом огневом прицепе и радиолокационной на третьем прицепе, обеспечивающей также передачу команд на борт ЗУР, ЗРК Rapier 2000 способен одновременно наводить две ракеты на две различные цели. Однако размещение комплекса на трех прицепах требует большого времени разворачивания комплекса при его подготовке к боевой работе, что увеличивает время реакции и снижает эффективность его применения, особенно по внезапнопоявляющимся целям, а также не позволяет применить его для защиты мотострелковых и танковых полков на марше. В виду того, что для передачи команд на ракету, сопровождаемую оптической системой, размещаемой на первом прицепе, необходимо применять передатчик РЛС, размещенный на третьем посту, комплекс Rapier 2000 не позволяет вести одновременно обстрел двух целей с разных направлений. В результате этого резко снижается эффективность комплекса при отражении налетов, когда самолеты из группы для атаки заходят с разных направлений под разными углами, что является наиболее вероятным в современных условиях.
В результате того, что комплекс размещен на трех прицепах, возникает необходимость обеспечения надежной связи между всеми прицепами, что приводит к усложнениям в аппаратуре, а возникший отказ в любом из прицепов или в канале связи между ними приведет к отказу комплекса и снижении боевой эффективности в целом.
Кроме того, наличие трех прицепов требует большого количества транспортных средств для его транспортирования, что значительно усложняет его обслуживание, эксплуатацию и применение.
Наиболее близким по своей сущности к изобретению является комплекс Crotale NG, который и является прототипом предлагаемого изобретения. ЗРК Crotale NG [3] представляет собой зенитный комплекс малой дальности и предназначен для защиты бронетанковых частей на марше, а также стационарных объектов от массированных атак самолетов и боевых вертолетов противника. ЗРК Crotale NG содержит размещенные на единой платформе: пусковые установки с ракетами, радиолокационную систему обнаружения целей и обработки их траекторий, радиолокационную систему сопровождения цели и пеленгации ракеты и совмещенные конструктивно с ней оптические средства. В состав оптических средств входят: система переднего обзора FLIR с двумя секторами обзора, дневная телевизионная камера с телеавтоматом сопровождения цели и ракеты, ИК-пеленгатор захвата ракеты и ее наведения в течение первых секунд полета.
Обнаруженная цель передается на РЛС сопровождения, которая сопровождает цель, а в режиме наведения ЗУР для обеспечения ее пеленгации используется переключение по частоте от импульса к импульсу и от пакета к пакету. В процессе полета ракеты приемопередатчик РЛС сопровождения цели работает в режиме маневренности по частоте и сжатия импульсов, что обеспечивает передачу команд на борт ЗУР [4]. В случае хорошей видимости, а также для дублирования используется для сопровождения цели и ракеты телекамера с телеавтоматом.
ЗРК Crotale NG является полностью автономной и автоматизированной системой, благодаря высокому уровню автоматизации имеет время реакции 5-8 с.
В то же время имеющиеся средства позволяют одновременно сопровождать только одну цель и наводить одну ракету. Захват второй цели и пуск по ней ЗУР может быть произведен только после завершения наведения ЗУР по первой цели и захвата второй цели. Очевидно, что время реакции по второй цели для данного комплекса составит как сумма времен: на полет первой ЗУР до цели (на дальности 8 км для ЗУР VT-1 это время составляет 10 с) на переброс и захват второй цели (это время реакции комплекса 5 с) и на подготовку пуска (1 с ). Таким образом, время реакции комплекса по второй цели будет составлять не менее 16 с.
При таком времени реакции вторая цель может быть пропущена и не обстреляна, что приведет к значительным потерям. Таким образом, существующий одноканальный комплекс имеет недостаточную боевую производительность и эффективность при отражении массированных налетов.
Целью предлагаемого изобретения является повышение боевой эффективности комплекса за счет расширения функциональных возможностей и обеспечения одновременного обстрела двух целей с разных направлений при сохранении малого времени реакции и мобильности комплекса.
Это достигается тем, что в зенитный ракетно-пушечный комплекс, включающий в себя башню с приводом наведения и размещенные на ней радиолокационную станцию обнаружения цели, радиолокационную станцию сопровождения цели и ракеты (ССЦР), содержащую приводы наведения, блоки выделения координат цели и ракеты, пусковые установки с зенитными управляемыми ракетами (ЗУР), зенитными автоматами и приводом наведения по углу места, вычислительную систему, содержащую блок выдачи целеуказания по угловым координатам и дальности для нескольких целей, блок вычисления зонных параметров, блок выработки команд управления ЗУР, блок выработки углов отворота пусковых установок и башни, пульт пуска, введена и размещена на башне оптико-электронная система (ОЭС), содержащая тепловизионный прибор с телеавтоматом, инфракрасный (ИК) пеленгатор, антенну с передатчиком команд ЗУР и приводы наведения ОЭС по углу места и азимуту с датчиками углов, а в вычислительную систему введены второй блок вычисления зонных параметров, второй блок выработки команд управления ЗУР и логическое устройство, содержащее схему разности, схему сравнения, две схемы задержки, три схемы И, четыре схемы ИЛИ, три пороговых устройства, два ключа, два переключателя и регистры памяти кодов адресов ЗУР, при этом выходы телеавтомата соединены одновременно с первыми входами второго блока выработки команд управления, первыми входами второго блока вычисления зонных параметров и входами приводов ОЭС, датчики которых подключены ко вторым входам второго блока вычисления зонных параметров и вторым управляемым входам первого переключателя, первые управляемые входы которого подключены к выходам блока выделения координат цели ССЦР по углам, а третий вход второго блока вычисления зонных параметров соединен с выходом блока выдачи целеуказания по дальности для второй цели, причем выходы блока выдачи целеуказания по угловым координатам для второй цели подключены на входы телеавтомата, при этом сигнальные выходы ИК-пеленгатора соединены со вторыми входами второго блока выработки команд управления ЗУР, выход которого подключен на вход передатчика команд ОЭС, причем первые выходы блоков вычисления зонных параметров через схему разности и пороговое устройство соединены с первым входом первой схемы ИЛИ, выход которой подключен к первому входу второй схемы ИЛИ, а вторые выходы блоков вычисления зонных параметров через схему сравнения соединены со вторым входом первой схемы ИЛИ и через пороговые устройства, ключи, вторые входы первой и второй схем И, четвертую схему ИЛИ подключены к третьему входу третьей схемы И, первый вход которой соединен через вторую схему задержки с первым выходом пульта пуска, который одновременно подключен к первым входам первой и второй схем И, а второй вход третьей схемы И через первую схему задержки и третью схему ИЛИ соединен с логическими выходами блока выделения координат ЗУР ССЦР и ИК-пеленгатора, которые одновременно подключены к управляющим входам соответствующих ключей, при этом выход третьей схемы И соединен с первым входом пульта пуска и вторым входом второй схемы ИЛИ, выход которой подключен к управляющим входам переключателей, причем выходы первого переключателя соединены со входами блока выработки углов отворота пусковых установок и башни, а выходы регистров памяти кодов адресов ракеты подключены к убавляемым входам второго переключателя, выход которого через второй вход пульта пуска соединен с зенитной управляемой ракетой в момент ее пуска.
Сущность изобретения заключается в том, что, наряду с существующими в комплексе радиолокационными средствами обнаружения целей, сопровождения цели и ЗУР, введена оптико-электронная система, содержащая тепловизионный прибор с телеавтоматом сопровождения цели, ИК-пеленгатор, передатчик команд ЗУР с антенной и приводы наведения, а в вычислительную систему введены вторые блоки выработки команд ЗУР, вычисления зонных параметров и специальное логическое устройство. При этом наличие в составе комплекса такой оптико-электронной системы со своими приводами, не связанной механически с радиолокационной системой, и соединение ее определенным образом с введенными элементами логического блока, в сравнении с прототипом, имеющим оптико-электронные средства конструктивно связанные с радиолокационной системой сопровождения, обеспечивает комплексу возможность одновременного приема целеуказания и захвата на сопровождение двух целей (одна ССЦР и другая ОЭС), находящихся на разных направлениях и разных дальностях друг от друга. Элементы логического устройства обеспечивают взаимодействие известных и введенных блоков, благодаря чему расширяются функциональные возможности комплекса, а именно обеспечивается одновременная работа двумя независимыми режимами - радиолокационным и оптико-электронным, обеспечивая тем самым одновременную стрельбу ЗУР по двум целям с сохранением времени реакции комплекса. Причем наличие известных систем ССЦР, содержащей блоки выделения координат цели и ЗУР и передачи команд на нее, и дополнение комплекса ОЭС, содержащей тепловизионный прибор с телеавтоматом, ИК-пеленгатор ракеты и передатчик с антенной со своими приводами обеспечивают независимое одновременное сопровождение двух целей с разных направлений и наведение на них ракет, а соединение через элементы логического устройства определенным образом введенных и известных блоков позволяет обеспечить автоматический переброс приводов вооружения на вторую цель после пуска первой ЗУР по первой цели, автоматический выбор кода адреса и пуск второй ЗУР по второй цели. Такое построение позволяет сохранить малое время реакции (время реакции по второй цели состоит только из времен схем задержки и времени переброса приводов вооружения на угол рассогласования между целями и составляет максимум 3,0 с) и одновременный обстрел двух целей с разных по азимуту и углу места направлений, а следовательно позволяет получить высокую боевую производительность, снизить пропуски целей и повысить боевую эффективность комплекса.
Кроме того, размещение ОЭС и дополнительных блоков совместно с известным оборудованием в едином модуле (на башне), наряду с расширением функциональных возможностей комплекса, за счет одновременного обстрела двух целей, позволяет сохранить его мобильность за счет размещения башни на одном носителе, например, на гусеничном самоходе, и обеспечить эффективное применение для защиты механизированных подразделений.
Сравнение указанного технического решения с прототипом позволяет установить его соответствие критерию "новизна". Сравнение заявленного технического решения с другими техническими решениями в данном классе МКИ не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерия "изобретательский уровень".
Изобретение поясняется графическим материалом, на котором представлена структурная схема. На схеме приняты следующие обозначения: 1 - радиолокационная станция обнаружения целей (СОЦ); 2 - радиолокационная станция сопровождения цели и ракеты (ССЦР); 3, 4 - приводы наведения антенны ССЦР по азимуту и углу места соответственно; 5 - блок выделения координат цели, сопровождаемой ССЦР; 6 - приемопередающая система ССЦР с антенной; 7 - блок выделения координат ЗУР, пеленгуемой ССЦР; 8 - оптико-электронная система (ОЭС); 9, 10 - приводы наведения ОЭС по азимуту и углу места соответственно; 11 - тепловизионный прибор (ТПВП); 12 - инфракрасный пеленгатор ЗУР (ИКП); 13, 14 - антенна и передатчик команд ЗУР ОЭС; 15, 16 - датчики положения ОЭС по азимуту и углу места соответственно; 17 - телеавтомат; 18 - башня; 19 - пусковая установка с ЗУР;20 - зенитные автоматы; 21, 22 - приводы наведения пусковых установок и башни соответственно; 23 - пульт пуска; 24 - вычислительная система; 25 - блок выдачи целеуказания по угловым координатам и дальности по нескольким целям; 26, 27 - первый и второй блоки выработки команд управления ЗУР; 28, 29 - первый и второй блоки вычисления зонных параметров; 30 - логическое устройство; 31, 32 - первый и второй переключатели; 33 - схема разности; 34, 35 - первая и вторая схемы задержки; 36, 37, 38 - первое, второе и третье пороговые устройства; 39, 40 - два ключа; 41 - схема сравнения; 42, 43, 44 - первая, вторая и третья схемы И; 45 - регистры памяти кодов адресов ЗУР; 46, 47, 48, 49 - первая, вторая, третья и четвертая схемы ИЛИ; 50 - блок выработки углов отворота пусковых установок и башни.
Станция обнаружения цели (1), типа 1РС1, представляет собой импульсно-допплеровскую станцию кругового обзора, обнаружения целей, обработки траекторий обнаруженных целей и выдачи их координат, ε
Станция сопровождения цели и ракеты (2), типа 1РС2, представляет собой двухдиапазонную моноимпульсную допплеровскую станцию сопровождения цели и визирования ракеты, обеспечивающую допоиск цели по полученному целеуказанию, захват и автосопровождение по угловым координатам и дальности, захват, пеленгацию и выработку координат ЗУР, шифрацию и передачу команд управления ЗУР. В состав ССЦР входит приемопередающая система с антенной (6), приводы наведения антенны по углу места (4) и азимуту (3) и блоки выделения координат цели (5) и ракеты (7).
Приводы наведения ССЦР обеспечивают наведения антенны ССЦР по сигналам целеуказания и слежение за целью при ее обнаружении по сигналам с блока выделения координат цели. Углы наведения антенны по азимуту могут составлять от минус 90o до 90o, по углу места от минус 10o до 85o.
Блок выделения координат цели (5) обеспечивает обработку радиолокационной информации и вырабатывает полные координаты цели - ε
Блок выделения координат ракеты (7) обеспечивает обработку сигнала, поступающего от ответчика ЗУР, вырабатывает координаты ЗУР относительно равносигнального направления диаграммы направленности антенны ССЦР - ε
Целевые входы ССЦР соединены с выходом блока выдачи целеукания (25), с которого в ССЦР выдаются координаты целеуказания по первой цели: εцу1, βцу1, Dцу1 - соответственно угол места, азимут и дальность. Выходы блока выделения координат целей (5) ССЦР соединены со входами первого блока вычисления зонных параметров (28), первыми управляемыми входами первого переключателя (31) и первого блока выработки команд управления ЗУР (26). После допоиска и захвата цели на сопровождение ССЦР вырабатывает координаты цели ε
Передатчик ССЦР осуществляет кодирование команд, формирование и излучение импульсных кодовых посылок. Структура сигналов канала передачи команд жестко привязана к номеру "а1"- кода адреса ракеты.
Пульт управления (23) представляет набор логических элементов, которые обеспечивают реализацию циклограммы пуска ракеты по сигналу "Пуск". Первый выход пульта пуска соединен с первыми входами первой и второй схем И(42) и И(43) и входом второй схемы задержки (35), так, что при пуске первой ЗУР с пульта на эти схемы подается сигнал СХОД. Второй выход пульта пуска соединен непосредственно с ЗУР, и в момент пуска на ЗУР передается установленный код адреса ракеты.
Первый вход пульта пуска соединен с выходом третьей схемы И(44), а его второй вход соединен с выходом второго переключателя, который подключает на свой выход регистр памяти (45) с необходимым кодом адреса ЗУР: "а1" для ракеты, которая наводится по цели, сопровождаемой ССЦР, или "а2" для ракеты, которая наводится по цели, сопровождаемой ОЭС. На выходе схемы И(44) вырабатывается сигнал разрешение пуска второй ракеты (РП) при существовании на всех ее входах единичного импульса. Пуск первой ракеты производится оператором от кнопки, а пуск второй ракеты осуществляется автоматически при поступлении сигнала РП=1 с выхода схемы И(44) логического устройства. По сигналу "Пуск" в ракете запускается блок питания. Одновременно с пуском с пульта на ракету выдается предназначенный ей код адреса в виде импульса напряжения. С началом движения ракеты в пульте возникает сигнал СХОД, первая ракета сходит с пусковой и подготавливаются к пуску цепи следующей ракеты.
Тепловизионный прибор (11), инфракрасный пеленгатор ЗУР (12) и антенна передатчика команд ЗУР (13) оптико-электронной системы (8) размещены на одном основании, которое управляется по горизонту (9) и вертикали (10) приводами наведения. Углы наведения ОЭС по азимуту могут составлять от минус 90o до 90o, по углу места от минус 10o до 85o. Для получения информации о положении ОЭС по азимуту β
Тепловизионный прибор (типа 1ПН80) работает в диапазоне 8-14 мкм и имеет на выходе стандартный телевизионный видеосигнал, который поступает на вход телеавтомата (ТА).
Телеавтомат (типа 1ТТС1) представляет собой быстродействующую специализированную вычислительную систему, реализующую корреляционно-контрастный алгоритм обработки и определения координат цели δεт, δβт относительно центра тепловизионного растра видеосигнала с использованием запомненного образа цели и ее текущего изображения на основании видеосигнала, принимаемого с ТПВП. Выходы ТА (17) (координаты цели δεт, δβт) ) подключены к входам приводов ОЭС (9, 10), к первым входам второго блока вычисления зонных параметров (29), вторые входы которого соединены с датчиками углов приводов наведения ОЭС (15, 16), и к первым входам второго блока выработки команд управления ракетой (27). Входы телеавтомата соединены с выходами блока выдачи целеуказания (25) по угловым координатам для второй цели εцу2, βцу2 - угол места и азимут соответственно.
Инфракрасный пеленгатор (типа 1ИКП1) автоматически измеряет координаты ЗУР, имеет в составе пеленгационный канал, представляющий собой систему с растровым анализатором, фотоприемником и усилителем фототока и координатор, который выделяет координаты ЗУР ε
Передатчик команд с антенной обеспечивает передачу команд на борт ЗУР в том же диапазоне, что и передатчик ССЦР, он осуществляет кодирование команд, формирование и излучение импульсных кодовых посылок. Структура сигналов канала передачи команд жестко привязана к номеру "а2"- кода адреса ракеты. В передатчике вырабатывается тактовая пара импульсных посылок, кодовый интервал тактовой посылки соответствует коду адреса ракеты "а2". Передатчик команд управления ОЭС своим входом подключен к выходу второго блока выработки команд (27) управления ЗУР K
Блок выдачи целеуказания (25) представляет вычислительное устройство, которое принимает из СОЦ координаты i-целей (например, до 8), из всех целей выбирает две (например, имеющие минимальные дальности подлета к комплексу) и по этим целям выдает координаты целеуказания в ССЦР εцу1, βцу1, Dцу1 и в ОЭС на вход телеавтомата εцу2, βцу2, а также дальность до второй цели Dц2 во второй блок выработки зонных параметров. Своими выходами блок выдачи целеуказания соединен: по первой цели со входами блока (5) выработки координат цели ССЦР; по второй цели со входами телеавтомата (17) по угловым координатам и с третьим входом второго блока (29) вычисления зонных параметров по дальности.
Блок выработки углов отворота (50) представляет вычислительное устройство, в котором по координатам сопровождаемой цели вычисляются углы упреждений, на которые необходимо отвернуть башню и пусковые установки, чтобы обеспечить встреливание ракет в радиолокационный луч при стрельбе по цели, сопровождаемой ССЦР, и в поле зрения ИК-пеленгатора при стрельбе по цели, сопровождаемой ОЭС. В общем случае эти углы определяются угловыми координатами, скоростями цели и баллистической функцией ЗУР, которая хранится в памяти вычислительной системы. Скорости цели в данном блоке определяются дифференцированием. Входы блока выработки углов отворотов подключены к выходу первого переключателя (31), а его выходы соединены со входами приводов наведения башни и пусковых установок ЗУР. Блоки выработки команд управления (26,27) представляют вычислительное устройство, в котором по разности измеренных угловых координат цели и ракеты путем масштабирования вычисляются команды управления, соответственно для каждой ЗУР: K
Первый блок выработки команд управления (26) своими входами подключен к выходам блоков выделения координат цели (5) и ракеты (6) ССЦР, а выходом соединен со входом передатчика ССЦР. Второй блок выработки команд управления (27) входами соединен с выходами телеавтомата (17) и ИК-пеленгатора (12), а выходом подключен ко входу передатчика команд ОЭС (14).
Блоки вычисления зонных параметров (28, 30) на основании координат сопровождаемых целей вычисляют времена до входа целей в зону поражения tвх1, tвх2 и нахождения целей в зоне tн1, tн2 - соответственно: для цели сопровождаемой ССЦР по координатам ε
Второй блок вычисления зонных параметров (29) своими входами соединен с выходами телеавтомата (17), с датчиками углов (15, 16) приводов наведения (9, 10) ОЭС и выходом блока выдачи целеуказания (25) по дальности для второй цели, а его выходы подключены: первый выход - ко второму входу схемы разности (33), выход которой соединен со входом первого порогового устройства (36), и второй выход - ко второму входу схемы сравнения (41) и входу второго порогового устройства (37).
Схема разности (33) подключена своими входами к первым выходам блоков вычисления зонных параметров и производит вычисление разности сигналов по формуле:
Δt = tвх1-tвх2,
где tвх1 - время до входа цели в зону поражения цели, сопровождаемой ССЦР;
tвх2 - время до входа цели в зону поражения цели, сопровождаемой ОЭС;
Δt - разность указанных времен.
Пороговое устройство (36) входом подсоединено к выходу схемы разности (33), принимает сигнал разности Δt и сравнивает его значение с установленным пороговым значением. Величина порогового значения выбирается из условия времени реакции комплекса по второй цели и складывается из времени переброса приводов башни и пусковой установки на максимально возможный угол рассогласования между сопровождаемыми целями и времени подготовки ЗУР к пуску, наибольшая величина составляет 3 с. Если вычисленная разность времен больше или равна 3 с, то на выходе порогового устройства устанавливается единичный импульс, который выдается на первый вход первой схемы ИЛИ (46). И через первый вход второй схемы ИЛИ (47) поступает на управляющие входы переключателей (31, 32), которые осуществляют соответственно подключение датчиков углов приводов ОЭС ко входам блока выработки углов отворота приводов башни и ПУ, перебрасывая их в точку прицеливания вооружения на вторую цель, и регистра кода адреса ЗУР "а2" к второму входу пульта пуска.
Схема сравнения (41) своими входами подключена ко вторым выходам блоков вычисления зонных параметров и производит анализ условия
tн2 ≥ tн1
где tн1 - время нахождения в зоне цели, сопровождаемой ССЦР;
tн2 - время нахождения в зоне цели, сопровождаемой ОЭС.
Если это условие выполняется, то на выходе схемы сравнения устанавливается единичный импульс, который поступает на второй вход схемы ИЛИ (46). И через второй вход второй схемы ИЛИ (47) поступает на управляющие входы переключателей (31, 32), которые осуществляют соответственно подключение датчиков углов приводов ОЭС ко входам блока выработки углов отворота приводов башни и ПУ, перебрасывая их в точку прицеливания вооружения на вторую цель, и регистра кода адреса ЗУР "а2" ко второму входу пульта пуска.
Первая схема задержки (34) своим входом подключена к выходу третьей схемы ИЛИ (48), входы которой соединены с логическим выходом блока выделения координат ЗУР, пеленгуемой ССЦР (7), (сигнал АСР-С), и логическим выходом ИК-пеленгатора (12), (сигнал АСР-К). Схема задержки (34) задерживает поступающий на ее вход сигнал АСР-С или АСР-К (в зависимости от того, какой присутствует) на время Δt = 0,2 с. Время выбрано из условия, что пущенная первая ЗУР сопровождается надежно в течение времени не менее 0,2 с. Выход схемы задержки соединен со вторым входом третьей схемы И (44).
Вторая схема задержки (35) своим входом подключена к первому выходу пульта пуска (23), а выходом соединена с первым входом третьей схемы И (44). Схема задержки (35) задерживает сигнал схода предыдущей (первой) ракеты на величину времени через которое разрешен пуск последующей (второй) ракеты с целью исключения влияния схода ракет друг на друга, а также безопасности стрельбы. Величина этого времени составляет 1 с.
Пороговые устройства (37, 38) своими входами раздельно подключены к вторым выходам блоков вычисления зонных параметров (28, 29), а выходами через ключи (39, 40) соединены со вторыми входами первой и второй схем И (42, 43) соответственно. Каждое пороговое устройство сравнивает полученные сигналы времени нахождения цели в зоне с установленным значением порога. Значение порога определяется минимально допустимым значением интервала времени для разрешения пуска по цели, чтобы она не успела выйти из зоны поражения за время подготовки пуска. Величина этого времени составляет 1,5 с. Если времена нахождения целей в зоне больше 1,5 с, то на выходе порогового устройства появляется единичный импульс.
Ключи (39) и (40) подсоединены своими входами соответственно к логическому выходу блока выделения координат ракеты ССЦР и логическому выходу ИК-пеленгатора. Так если первой пущена ЗУР по цели, сопровождаемой ССЦР, приходит сигнал АСР-С, ключ (39) срабатывает и пропускает импульс порогового устройства (37), дающий разрешение на пуск второй ЗУР, сопровождаемой ОЭС. Если первой пущена ЗУР по цели, сопровождаемой ОЭС, то приходит сигнал АСР-К, ключ (40) срабатывает и пропускает импульс порогового устройства (38), дающий разрешение на пуск второй ЗУР по цели, сопровождаемой ССЦР.
Первый переключатель (31) своими управляемыми входами соединен с выходами блока (5) выделения координат целей ССЦР ε
Второй переключатель (32) своими управляемыми входами соединен с выходами регистров памяти кодов адресов ЗУР (45), управляющий вход его подключен к выходу схемы ИЛИ (47), а выход переключателя соединен со вторым входом пульта пуска.
Регистры памяти кодов адресов ЗУР содержат в памяти заранее установленные коды адресов, жестко привязанных к структуре кодовых посылок, передаваемых на ракету : код "а1" соответствует структуре кодовых посылок, передаваемых на ракету ССЦР; код "а2" соответствует структуре кодовых посылок, передаваемых на ракету передатчиком ОЭС.
Все блоки вычислительной системы и элементов логического устройства построены на базе вычислителя серии типа 1839, а также схем цифровой логики, скоростных интегральных схем ТТЛШ серии 1533, 530 и БИС оперативной и постоянной памяти. Примеры выполнения и подключения этих устройств приведены в [5, 6]. Обмен между блоками вычислительной системы и блоками СОЦ, ССЦР, ОЭС, приводами, пультом управления выполнен в цифровом виде по мультиплексному каналу обмена, выполненному в соответствии с ГОСТ 26765.52-87 [7].
Функционирование комплекса по предлагаемому изобретению происходит следующим образом.
Станция обнаружения цели (1) передает в блок выдачи целеуказания (25) координаты обнаруженных целей ε
Блок выдачи целеуказания, выбрав из всех целей две, выдает одновременно координаты целеуказания по первой цели в блок выделения координат цели (5) ССЦР εцу1, βцу1, Dцу1 = и по второй в телевизионный автомат (17) ОЭС εцу2, βцу2. Одновременно с блока выдачи целеуказания во второй блок выработки зонных параметров (29) выдается дальность Dц2 до второй цели. При получении сигналов целеуказания ССЦР и ОЭС, каждая из систем наводится своими приводами в точку целеуказания и осуществляет допоиск и захват целей на сопровождение. ССЦР сопровождает цель по отраженному от цели радиолокационному сигналу, ОЭС по тепловому контрасту цели. Координаты сопровождаемых целей из блока выделения координат цели ССЦР ε
В блоках вычисления зонных параметров вычисляются времена до входа tвх1, tвх2 целей в зону поражения и времена tн1, tн2 нахождения целей в зоне, соответственно первой и второй целей.
Вычисленные величины времен до входа целей в зону поступают на вход схемы разности (33), выход которой соединен с пороговым устройством (36). Если величина, поступающая со схемы разности меньше установленного порога, то на выходе порогового устройства (36) будет нулевой сигнал, в результате нулевой сигнал будет также на входах и выходах схем ИЛИ (46), ИЛИ (47), и управляющий сигнал на вход переключателей (31, 32) не приходит, переключатели остаются в исходном положении.
Вычисленные величины времен нахождения целей в зоне поражения поступают на вход схемы сравнения (41). Если время нахождения в зоне цели, сопровождаемой ССЦР, меньше, чем время нахождения в зоне цели, сопровождаемой ОЭС, то на выходе схемы сравнения (41) будет нулевой сигнал, на входах и выходах схем ИЛИ (46) и ИЛИ (47) сигналы отсутствуют и на входы переключателей (31, 32) управляющий сигнал не приходит, переключатели остаются в исходном положении.
Для обоих этих случаев первый переключатель подсоединяет выход блока выработки координат цели, сопровождаемой ССЦР, по угловым координатам ко входам блока вычисления углов отворота, в результате этого приводы башни и ПУ отрабатывают углы отворотов для стрельбы по первой цели, сопровождаемой ССЦР. Второй переключатель подсоединяет выход регистра ко второму входу пульта и в него приходит код адреса "а1".
При входе цели в зону поражения оператор нажимает кнопку "Пуск" и происходит пуск первой ЗУР по цели, сопровождаемой ССЦР. Ракета пеленгуется ССЦР, вырабатываются ее координаты, которые поступают с блока (7) выделения координат ЗУР в первый блок выработки команд управления ЗУР (26). В блоке выработки команд вырабатываются команды K
После схода ракеты, сигнал СХОД с первого выхода пульта пуска (23) приходит на первые входы первой и второй схем И (42, 43) и на вход схемы задержки (35), на выходе которой формируется задержанный на 1 с единичный импульс, который поступает на первый вход схемы И (44).
Одновременно, если выполняются условия, что время нахождения в зоне второй цели, сопровождаемой ОЭС, не менее 1,5 с, срабатывает пороговое устройство (37) и на его выходе формируется единичный импульс, и если первая ракета сопровождается ССЦР, то при наличии логического сигнала АСР-С срабатывает ключ (39) и на выходе схемы И (42) возникает единичный импульс, который через первый вход (на втором входе сигнал отсутствует, так как в полете пока находится одна ракета) четвертой схемы ИЛИ (49) поступает на третий вход схемы И (44), при этом если ракета надежно сопровождается ССЦР в течение 0,2 с (сигнал АСР-С присутствует не менее 0,2 с), то на второй вход схемы И(44) с выхода первой схемы задержки (34) также поступает единичный сигнал. Таким образом, на входах схемы И (44) присутствует одновременно три единичных импульса, которые суммируются и на ее выходе появляется единичный импульс, который через схему ИЛИ (47) выдает управляющий сигнал на переключатели. Первый переключатель (31) подключает ко входу блока выработки отворотов выходы датчиков углов (15, 16) приводов ОЭС, в результате чего приводы башни и ПУ наводятся в точку прицеливания по второй цели, сопровождаемой ОЭС. Второй переключатель (32) подключает в это же время на второй вход пульта пуска (23) регистр с кодом адреса ЗУР "а2", этим обеспечивается прием ракетой команд с кодом адреса передатчика ОЭС. Одновременно единичный импульс со схемы И (44) передается на первый вход пульта пуска и разрешает пуск второй ЗУР (сигнал РП=1). Пуск ракеты осуществляется автоматически, при этом в аппаратуру ракеты по сигналу ПУСК с пульта пуска передается импульс на включение кода адреса "а2".
При попадании ракеты в поле зрения ИК-пеленгатора она захватывается и пеленгуется им. Координаты ракеты ε
Если после взятия целей на сопровождение окажется, что время входа цели, сопровождаемой ССЦР, больше времени входа цели, сопровождаемой ОЭС, то на выходе порогового устройства (36) возникнет единичный импульс, который через схемы ИЛИ (46, 47) поступит на управляющие входы переключателей (31, 32).
Если при входе целей в зону окажется, что разность времени нахождения в зоне цели, сопровождаемой ССЦР, больше времени нахождения в зоне цели, сопровождаемой ОЭС, на 3 с, то на выходе схемы сравнения (41) возникает единичный сигнал, который через схемы ИЛИ (46, 47) поступит на управляющие входы переключателей (31, 32).
Для этих двух ситуаций переключатель (31) подключит датчики углов приводов ОЭС ко входам блока выработки отворотов и приводы ПУ и башни будут наводиться в точку прицеливания по цели, сопровождаемой ОЭС. Переключатель (32) подключит выход регистра (45) с кодом адреса ЗУР "а2" на второй вход пульта пуска. Оператор произведет пуск первой ЗУР по цели, сопровождаемой ОЭС, по пуску на ракете установится код адреса "а2". После схода ракета захватывается, пеленгуется и на нее передаются команды с передатчика ОЭС. С появлением сигнала СХОД сработают последовательно пороговое устройство (38), ключ (40), схема И (43) и на выходе схемы И (44) появится единичный импульс, который поступит на второй вход схемы ИЛИ (47), а на первом входе этой схемы также присутствует единичный импульс, в результате на выходе схемы ИЛИ (47) сигнал станет нулевым, переключатели перебросятся в исходное положение и подключат соответственно: первый переключатель - выход блока выработки координат цели, сопровождаемой ССЦР, по угловым координатам ко входам блока вычисления углов отворота, в результате этого приводы башни и ПУ отработают углы отворотов для стрельбы по цели, сопровождаемой ССЦР; второй - переключатель - выход регистра с кодом адреса "а1" ко второму входу пульта. Одновременно с выхода схемы И (44) на первый вход пульта пуска придет сигнал разрешения пуска (РП=1) второй ЗУР и произойдет пуск второй ЗУР по цели, сопровождаемой ССЦР.
Таким образом, введение в состав комплекса оптико-электронной системы, способной независимо от ССЦР принимать целеуказание с блока выдачи целеуказания, захватывать и сопровождать цель телеавтоматом, а после пуска ЗУР захватывать и пеленговать ее ИК-пеленгатором и передавать на нее команды управления в соответствии с выбранным вторым адресом, обеспечивает комплексу функционирование одновременно по двум целям за счет обеспечения работы в независимых режимах: радиолокационном и оптико-электронном. А наличие независимых больших углов наведения ОЭС и ССЦР позволяет обеспечивать одновременный обстрел двух целей с разных направлений (по азимуту от минус 90o до 90o и углу места от минус 10o до 85o).
Введение второго блока вычисления зонных параметров и логического устройства позволяет осуществить переброс приводов вооружения на вторую цель после пуска и выбор кода адреса второй ЗУР после пуска первой, и тем самым обеспечить малое время реакции комплекса (3 с вместо 16 с). Это стало возможным благодаря реализации в логическом устройстве следующих условий:
1) если обе цели на момент их захвата на сопровождение еще не вошли в зону поражения, то первой обстреливается та цель, которая войдет первой, независимо от того, какой системой она сопровождается ССЦР или ОЭС - это обеспечено введением в логическое устройство схемы разности и первого порогового устройства;
2) если обе цели на момент захвата на сопровождение уже вошли в зону поражения, то первой обстреливается та цель, у которой время нахождения в зоне меньше, независимо от того, какой системой она сопровождается ССЦР или ОЭС, - это обеспечено введением в логическое устройство схемы сравнения;
3) если произведен пуск первой ЗУР по первой цели, то тематически вырабатывается разрешение на пуск по второй цели из условия безопасности стрельбы, надежного сопровождения первой ЗУР и рационального расходования боекомплекта (обстрела цели, которая не успеет выйти из зоны) - это обеспечено введением в логическое устройство пороговых устройств, ключей, двух схем задержки и схем И, ИЛИ.
Таким образом, реализуется возможность одновременного обстрела двух целей с любых направлений, сохраняется малое время реакции комплекса по второй цели, что повышает боевую производительность и боевую эффективность комплекса не менее чем в 2 раза и обеспечивает высокую эффективность комплекса при отражении массированных налетов воздушных средств. А размещение ОЭС и необходимых блоков на той же башне, где размещены СОЦ, ССЦР и вооружение, сохраняет комплексу высокую мобильность и эффективную защиту не только стационарных объектов, но и мотострелковых подразделений.
По настоящему предложению разработана конструкторская документация при создании комплекса "Панцирь-С", изготовлен экспериментальный образец, который находится на полевых испытаниях. Предлагаемое изобретение может быть также применено при модернизации комплекса "Тунгуска М1".
Источники информации
1. С. И. Петухов, И.В. Шестов "История создания и развития вооружения и военной техники ПВО Сухопутных войск России". Часть вторая. Издательство "ВПК", г. Москва, 1997 г., стр. 101.
2. Soldat und Technik, 1987 г., N 4, стр. 262.
3. Defense et Armement, 1989, N 89, p. 76.
4. Armada, 1989, V. 13, N 2, pp 94-95.
5. Зельдин E. A. "Цифровые интегральные микросхемы в информационно-измерительной аппаратуре". Энергоатомиздат, 1986 г.
6. "Аналоговые и интегральные микросхемы". Справочное пособие под редакцией Якубовского "Радио и связь", 1990 г. стр. 46-53.
7. Интерфейс магистральный последовательный системы электронных модулей. ГОСТ 26765.52-87. Государственный комитет СССР по стандартам. Москва. Издательство стандартов, 1987 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 2006 |
|
RU2321818C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫСОКОТОЧНЫМ ВООРУЖЕНИЕМ И КОМПЛЕКС ВЫСОКОТОЧНОГО ВООРУЖЕНИЯ | 2011 |
|
RU2453794C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ И ОПТИКО-ЭЛЕКТРОННАЯ КОМАНДНАЯ СИСТЕМА НАВЕДЕНИЯ | 2005 |
|
RU2288424C1 |
| Зенитный ракетный комплекс | 2017 |
|
RU2651533C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА | 1999 |
|
RU2165582C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЧАЛЬНЫХ УСЛОВИЙ НЕЛИНЕЙНОЙ ТРАЕКТОРИИ ВОЗДУШНОЙ ЦЕЛИ | 2011 |
|
RU2483272C2 |
| Система сопровождения целей и ракет зенитной боевой машины | 2019 |
|
RU2710994C1 |
| СПОСОБ ПОСТРОЕНИЯ ИНТЕГРАЛЬНОЙ ЗОНЫ ПОРАЖЕНИЯ ГРУППИРОВКИ ОГНЕВЫХ СРЕДСТВ | 2010 |
|
RU2430384C1 |
| ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2002 |
|
RU2241193C2 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2006 |
|
RU2324139C1 |
Изобретение относится к области военной техники, в частности к зенитным комплексам ближнего рубежа. Техническим результатом изобретения является повышение боевой эффективности комплекса за счет расширения функциональных возможностей и обеспечения одновременного обстрела двух целей с разных направлений при сохранении малого времени реакции и мобильности комплекса. Сущность изобретения: в зенитный ракетно-пушечный комплекс введена и размещена на башне оптико-электронная система (ОЭС), содержащая тепловизионный прибор с телеавтоматом, инфракрасный (ИК) пеленгатор, антенну с передатчиком команд ЗУР и приводы наведения ОЭС по углу места и азимуту с датчиками углов, а в вычислительную систему введены второй блок вычисления зонных параметров, второй блок выработки команд управления ЗУР и логическое устройство, содержащее схему разности, схему сравнения, две схемы задержки, три схемы И, четыре схемы ИЛИ, три пороговых устройства, два ключа, два переключателя и регистры памяти кодов адресов ЗУР. 1 ил.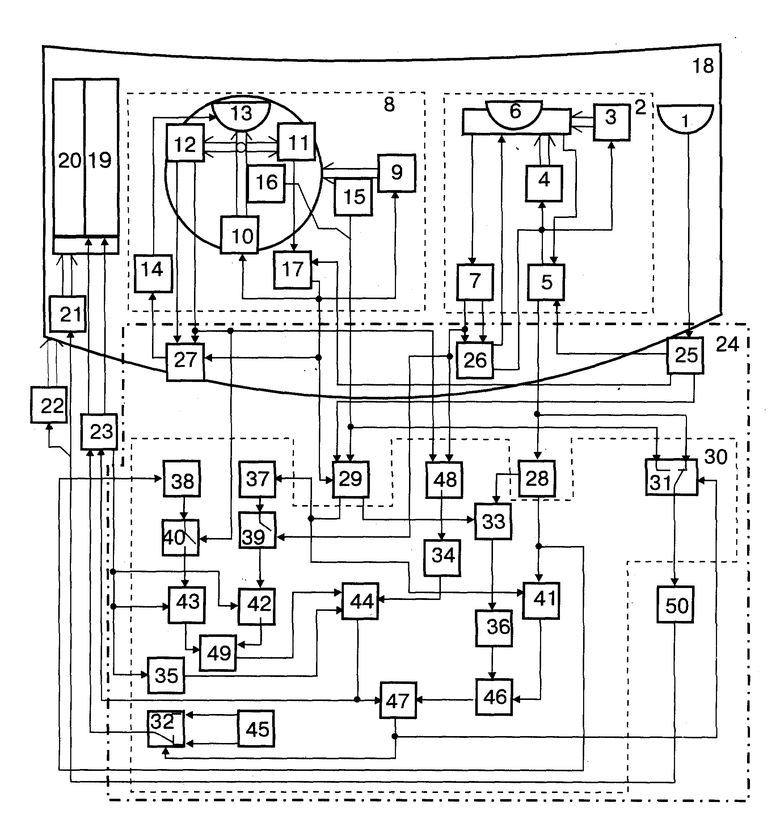
Зенитный ракетно-пушечный комплекс, включающий в себя башню с приводом наведения и размещенные на ней радиолокационную станцию обнаружения цели, радиолокационную станцию сопровождения цели и ракеты (ССЦР), содержащую приводы наведения, блоки выделения координат цели и ракеты, пусковые установки с зенитными управляемыми ракетами (ЗУР), зенитными автоматами и приводом наведения по углу места, вычислительную систему, содержащую блок выдачи целеуказания по угловым координатам и дальности для нескольких целей, блок вычисления зонных параметров, блок выработки команд управления ЗУР, блок выработки углов отворота пусковых установок и башни, пульт пуска, отличающийся тем, что в состав комплекса введена и размещена на башне оптико-электронная система (ОЭС), содержащая тепловизионный прибор с телеавтоматом, инфракрасный (ИК) пеленгатор, антенну с передатчиком команд ЗУР и приводы наведения ОЭС по углу места и азимуту с датчиками углов, а в вычислительную систему введены второй блок вычисления зонных параметров, второй блок выработки команд управления ЗУР и логическое устройство, содержащее схему разности, схему сравнения, две схемы задержки, три схемы И, четыре схемы ИЛИ, три пороговых устройства, два ключа, два переключателя и регистры памяти кодов адресов ЗУР, при этом выходы телеавтомата соединены одновременно с первыми входами второго блока выработки команд управления, первыми входами второго блока вычисления зонных параметров и входами приводов ОЭС, датчики которых подключены ко вторым входам второго блока вычисления зонных параметров и вторым управляемым входам первого переключателя, первые управляемые входы которого подключены к выходам блока выделения координат цели ССЦР по углам, а третий вход второго блока вычисления зонных параметров соединен с выходом блока выдачи целеуказания по дальности для второй цели, причем выходы блока выдачи целеуказания по угловым координатам для второй цели подключены на входы телеавтомата, при этом сигнальные выходы ИК-пеленгатора соединены со вторыми входами второго блока выработки команд управления ЗУР, выход которого подключен на вход передатчика команд ОЭС, причем первые выходы блоков вычисления зонных параметров через схему разности и пороговое устройство соединены с первым входом первой схемы ИЛИ, выход которой подключен к первому входу второй схемы ИЛИ, а вторые выходы блоков вычисления зонных параметров через схему сравнения соединены со вторым входом первой схемы ИЛИ и через пороговые устройства, ключи, вторые входы первой и второй схем И, четвертую схему ИЛИ подключены к третьему входу третьей схемы И, первый вход которой соединен через вторую схему задержки с первым выходом пульта пуска, который одновременно подключен к первым входам первой и второй схем И, а второй вход третьей схемы И через первую схему задержки и третью схему ИЛИ соединен с логическими выходами блока выделения координат ЗУР ССЦР и ИК-пеленгатора, которые одновременно подключены к управляющим входам соответствующих ключей, при этом выход третьей схемы И соединен с первым входом пульта пуска и вторым входом второй схемы ИЛИ, выход которой подключен к управляющим входам переключателей, причем выходы первого переключателя соединены со входами блока выработки углов отворота пусковых установок и башни, а выходы регистров памяти кодов адресов ракеты подключены к управляемым входам второго переключателя, выход которого через второй вход пульта пуска соединен с зенитной управляемой ракетой в момент ее пуска.
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| US 5042743 A, 27.08.91 | |||
| US 5197691 A, 30.03.93 | |||
| US 4406429 A, 27.09.83 | |||
| US 4347996 A, 07.09.82 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ ПИВА | 1996 |
|
RU2103341C1 |
| GB 1568915 A, 11.06.80 | |||
| ПРИМЕНЕНИЕ СОСТАВНЫХ ЦЕПОЧЕК ПРЕОБРАЗОВАНИЙ ДЛЯ МНОЖЕСТВА УСТРОЙСТВ | 2015 |
|
RU2697625C2 |
| МОНИТОРИНГ ОБЪЕКТОВ, СОДЕРЖАЩИХ ПЕРЕКЛЮЧАЕМЫЕ ОПТИЧЕСКИЕ УСТРОЙСТВА И КОНТРОЛЛЕРЫ | 2015 |
|
RU2684751C2 |
| DE 3034838 C1, 29.11.90. | |||
