Предлагаемый моноимпульсный фазовый пеленгатор относится к области радиолокации и предназначен для определения пеленга на локационный объект, являющийся источником радиоизлучения (ИРИ) или отражения радиоволн, одновременно в двух плоскостях - по азимуту и углу места.
Моноимпульсные фазовые пеленгаторы широко известны. Используемый в таких пеленгаторах метод определения угловых координат ИРИ основан на оценке разности хода лучей от ИРИ до нескольких пространственно разнесенных точек приема за счет преобразования этой разности в фазовые соотношения принимаемых сигналов. Данные фазовые соотношения с учетом геометрии антенной системы позволяют одновременно определять азимут и угол места ИРИ.
Теоретическое обоснование и варианты технической реализации моноимпульсных фазовых пеленгаторов, представляющих собой аналоги заявляемого пеленгатора, содержатся в [1-3], где доказательство эффективности фазовой процедуры определения угловых координат ИРИ и соответствующих пеленгационных устройств приводится как результат оптимального статистического синтеза при аддитивном воздействии дельта-коррелированного внутриприемного шума. Однако в этих же литературных источниках указывается, что оптимальным подобный синтез пеленгаторов можно считать только условно, поскольку: во-первых, методика синтеза распространяется только на случай значительного превышения информативным сигналом уровня шума (при амплитудных отношениях “сигнал-шум” более трех-пяти); во-вторых, проводится факторизация двумерной постановки задачи синтеза пеленгатора двух угловых координат (азимута и угла места) и вся задача сводится к двум независимым одномерным задачам для пеленгаторов азимута и углу места, что исключает возможность получения двумерных технических решений, соответствующих совместной пространственной обработке сигналов от всей апертуры антенной системы для определения угловых координат ИРИ в двух плоскостях.
В заявляемом моноимпульсном фазовом пеленгаторе решаются актуальные задачи его оптимизации в более широком диапазоне энергетических условий функционирования по сравнению с известными моноимпульсными фазовыми пеленгаторами.
В известных моноимпульсных фазовых пеленгаторах в области малых отношений сигнал-шум, которая является важной для радиолокационных систем определения угловых координат ИРИ, проявляются основные недостатки их статистического синтеза в указанных выше ограничениях. Именно в этой области флюктуационная погрешность определения угловых координат ИРИ превышает все другие виды погрешностей, ограничивая реальную чувствительность, точность и дальность действия пеленгаторов.
Определение двух угловых координат ИРИ в моноимпульсных фазовых пеленгаторах основывается на формировании соответствующих двух оценок углового отклонения по азимуту и углу места ИРИ относительно равносигнального направления (РСН), которым является направление синфазного приема полезного (информативного) сигнала от различных точек приема антенной системы и которое совпадает с нормалью к плоскости пеленгования антенной системы.
В числе аналогов заявляемого моноимпульсного фазового пеленгатора можно дополнительно указать и различные технические решения, которые, по сравнению с изложенными выше, не отвечают критериям оптимальности даже в области больших отношений “сигнал-шум”. Одно из них приводится в [4, с.77, рис.4.9] и содержит три отдельные антенны, фазовые центры которых являются вершинами прямоугольного треугольника. Подобное расположение антенн влечет за собой неоптимальное использование площади их суммарного раскрыва и, как следствие этого, дает малую точность оценок пеленга.
Главная причина недостатков известных схем построения моноимпульсных фазовых пеленгаторов состоит в том, что в области малых отношений “сигнал-шум” они не являются оптимальными ввиду неполного использования информативных признаков входного пространственно-временного сигнала, поступающего от ИРИ. Связано это со спецификой синтеза структур построения данных пеленгаторов, для которых в качестве исходной используется линейная модель пространственной обработки. Такая модель полностью справедлива для больших отношений “сигнал-шум”, но область малых отношений “сигнал-шум” она описывает приближенно. На основе этой линейной модели, позволяющей проводить факторизацию по двум независимым угловым координатам, возможно получение оптимального результата только при отношениях “сигнал-шум” выше трех-пяти (по амплитуде), на что неоднократно указывается в [1, 2]. Это означает, что условия радиолокационного взаимодействия, при которых информативный сигнал от ИРИ и мешающие воздействия (например, внутриприемный шум) соизмеримы по мощности, в настоящее время учитываются только в приближенном виде для синтеза и построения моноимпульсных фазовых пеленгаторов.
Наряду с вопросами синтеза моноимпульсных фазовых пеленгаторов потенциальная точность формируемых ими оценок традиционно производится также при амплитудных отношениях “сигнал-шум” выше трех на основе асимптотической гауссовой модели распределения погрешностей. Тем не менее, известно, что граница потенциальной точности измерения в области малых отношений “сигнал-шум” может быть определена на основе полного вида негауссового распределения мгновенной фазы [1, 2]. При таком определении оказывается, что рассматриваемые моноимпульсные фазовые пеленгаторы не достигают границы потенциальной точности измерения в области малых отношений “сигнал-шум”.
Существующие технические решения, представляющие собой аналоги заявляемого моноимпульсного фазового пеленгатора, не реализуют потенциальных возможностей эффективной оценки угловых координат в нижней части диапазона отношений “сигнал-шум”, т.е. в той области, где это имеет существенное практическое значение для реальных задач. Известно, что радиолокационное взаимодействие характеризуется существенным непостоянством и большим разбросом энергетических отношений “сигнал-шум” в зависимости от условий распространения электромагнитных волн, эволюции ИРИ в пространстве и т.п. [3], при этом возможны резкие падения мощности полезного сигнала, приводящие к нарушению процесса устойчивого, точного и надежного измерения угловых координат.
Таким образом, очевидную значимость для качества работы всей радиолокационной системы имеют точностные характеристики моноимпульсного фазового пеленгатора именно в области малых отношений “сигнал-шум”.
Главный недостаток известных моноимпульсных фазовых пеленгаторов состоит в низкой точности оценок угловых отклонений по азимуту и углу места ИРИ относительно РСН в области малых отношений “сигнал-шум”, что связано с неоптимальностью их построения для данной области энергетических соотношений.
Наиболее близким по большинству совпадающих с заявляемым моноимпульсным фазовым пеленгатором существенных признаков является моноимпульсный фазовый пеленгатор, принятый в качестве прототипа, состоящий из двух независимых идентичных каналов формирования сигналов отклонений ИРИ относительно РСН по азимуту и углу места, каждый из которых в соответствующей плоскости представляет собой моноимпульсный радиолокатор со сравнением фаз, описанный (за исключением передающей части) в [3, с.235, рис.5.13].
Пеленгатор-прототип (фиг.1) содержит антенную систему (А), многоканальное моноимпульсное приемное устройство (МПУ), первый и второй формирователи сигнала отклонения (ФСО) от РСН, первые входы которых соединены соответственно с первым и вторым выходами МПУ. Выходы первого и второго ФСО являются соответствующими выходами пеленгатора, первый, второй, третий и четвертый выходы антенной системы подключены к соответствующим четырем входам МПУ, третий и четвертый выходы МПУ соединены со вторыми входами соответственно первого и второго ФСО.
Работа пеленгатора-прототипа происходит следующим образом.
Сигнал от ИРИ приходит в виде потока мощности П, который преобразуется антенной системой в ее выходные электрические сигналы суммарной мощностью Р0=АП, где А - эффективная площадь всей антенной системы. Для заявляемого пеленгатора и прототипа величины П, А и Р0 полагаются равными, что обеспечивает тождественность их энергетических характеристик в одинаковых располагаемых ограниченных условиях непосредственного конструктивного исполнения их антенной системы, например мидель ракеты или носовая часть самолета.
Направление прихода потока мощности П, т.е. направление на ИРИ, описывается в горизонтальной плоскости через азимут α и в вертикальной плоскости через угол места β. Аналогичным образом описывается и опорное направление, задаваемое РСН, в виде его координат в горизонтальной плоскости через азимут α0 и в вертикальной плоскости через угол места β0.
Таким образом, для моноимпульсного фазового пеленгатора оценке подлежат два угловых отклонения ИРИ относительно РСН: в азимутальной Δα=α-α0 и угломестной Δβ=β-β0 плоскостях, на основании которых, зная азимут α0 и угол места β0 РСН, определяют азимут α и угол места β ИРИ.
Плоскость раскрыва (апертура) антенной системы прототипа пространственно разделена на четыре отдельные идентичные непересекающиеся и примыкающие друг к другу области антенных элементов, т.е. на четыре парциальные апертуры, эффективные площади которых равны между собой. Каждая из четырех парциальных апертур формирует в пространстве идентичные по коэффициенту направленного действия парциальные диаграммы направленности, фазовые центры которых располагаются в фазовых центрах каждой из отдельных четырех парциальных апертур.
Четыре парциальные диаграммы направленности образуют две равносигнальные плоскости в двух взаимно ортогональных плоскостях (азимутальную и угломестную), в которых оцениваются угловые отклонения по азимуту и углу места. При пересечении эти две равносигнальные плоскости образуют равносигнальное направление антенной системы.
Такой принцип разбиения апертуры антенны обеспечивает одинаковые потенциальные точности оценки угловых координат в обеих плоскостях пеленгования, что чаще всего и требуется. Каждую область антенной системы (отдельную парциальную апертуру) с помощью соответствующей диаграммообразующей схемы для антенной решетки либо соответствующим размещением параболической зеркальной антенны с рупором можно привести к одной точке на плоскости пеленгования, соответствующей ее фазовому центру.
Четыре фазовых центра, как показано на фиг.2, с номерами 0, 1, 2 и 3 (нумеруемых против часовой стрелки) попарно образуют два перпендикулярных канала пеленгования - по азимуту (в горизонтальной плоскости точки 0 и 2) и по углу места (в вертикальной плоскости точки 1 и 3). Равенство метрических характеристик азимутального и угломестного каналов пеленгования обеспечивается за счет одинакового разноса фазовых центров, при этом базы пеленгования для обеих плоскостей равны между собой, а четыре точки приема расположены эквидистантно по окружности диаметра d.
Необходимо сказать, что при раскрытии технического результата от использования заявляемого пеленгатора по сравнению с прототипом обязательным условием является равенство энергетических и метрических характеристик в обоих случаях, поскольку способ достижения положительного результата состоит исключительно в повышении эффективности обработки принимаемого пространственно-временного сигнала от ИРИ. Равенство энергетических характеристик для заявляемого пеленгатора и прототипа определяется выбором одних и тех же значений величин А и П (о чем говорилось ранее), а равенство метрических характеристик - одинаковым в обоих случаях диаметром окружности d, на которой расположены точки приема.
При этом из точки приема 0 принимаемый сигнал поступает на первый выход антенной системы, из точки приема 1 - на второй выход антенной системы, из точки приема 2 - на третий выход антенной системы, а из точки приема 3 - на четвертый выход антенной системы.
Воздействующий на антенную систему прототипа поток мощности П разделяется на четыре равные части по четырем антенным апертурам равной эффективной площади А/4, а затем сформированные электрические сигналы обрабатываются в четырех идентичных каналах приема МПУ. Таким образом, мощность полезного сигнала, приведенная к каждой из точек приема на плоскости пеленгования прототипа, равна АП/4=P0/4. Для общности описания работы прототипа и заявляемого пеленгатора обозначим число каналов приема через М, соответственно амплитуда входного полезного сигнала для каждого канала приема прототипа будет пропорциональна величине  .
.
Электрические сигналы с каждого из четырех выходов антенной системы поступают на соответствующие четыре входа четырехканального МПУ, где в четырех приемных каналах осуществляются их усиление и согласованная частотно-временная обработка, а также нормирование выходного сигнала каждого приемного канала с помощью автоматической регулировки усиления. Регулирование осуществляется относительно суммарного сигнала с выходов всех четырех приемных каналов, что эквивалентно умножению каждого из четырех принимаемых сигналов на нормирующий множитель, свойства которого для простоты изложения можно описывать исходя из модели инерционной автоматической регулировки усиления [5].
Тогда в результате действия автоматической регулировки усиления принимаемые сигналы нормируются относительно медленно меняющегося процесса Q(PS, PN, t), который зависит от мощностей выходных сигналов МПУ в полосе приема: полезного РS и шумового РN.
Будем считать, что данная операция одинакова как для заявляемого пеленгатора, так и для прототипа, эквивалентна замене нормирующего процесса Q(PS, PN, t) его математическим ожиданием [1, 5] и сводится к умножению принимаемых сигналов на безразмерный постоянный коэффициент регулирования kA.
Сигнал на выходе каждого отдельного приемного канала МПУ yi(θ, φ, t) с учетом действия автоматической регулировки усиления запишем в общем виде [1, 4, 5], применимом как для прототипа, так и для заявляемого устройства

где i - номер точки приема (для прототипа i=0…3, что соответствует номерам каналов приема от 1 до 4, т.е. i+1); хi(θ, φ, t) - полезный (информативный) сигнал; ξi(t) - приведенный к входу внутриприемный шум i-го канала приема, мощность которого в полосе приема равна РN.
Полезный сигнал xi(θ, φ, t) запишем в виде, раскрывающим его временной процесс s(t), который одинаков для каждого из каналов приема, и информативную фазовую составляющую, определяемую отклонением ИРИ от РСН, т.е.

Величина ϕi(θ, φ) в (2) представляет собой информативную фазу, определяемую угловым отклонением ИРИ относительно РСН в сферической системе координат, связанной с апертурой антенной системы, где:
θ - угловое отклонение ИРИ по широте,
φ - долгота углового отклонения ИРИ.
Выбор сферической системы координат, связанной с антенной системой, позволяет сократить дальнейшие математические выкладки, обеспечивая единообразие в описании работы прототипа и заявляемого пеленгатора. При этом угловые отклонения ИРИ относительно РСН Δα и Δβ однозначно связаны с углами θ и φ:
- для азимутальной плоскости Δα=arctg(tgθcosφ),
- для угломестной плоскости Δβ=arctg(tgθsinφ).
Следует принять во внимание, что оцениваемые как заявляемым пеленгатором, так и прототипом, угловые отклонения ИРИ относительно РСН Δα и Δβ в нормальных условиях функционирования не превышают по абсолютной величине полуширины диаграммы направленности антенной системы. Поэтому, учитывая направленные свойства антенной системы, приведенные выше выражения для Δα и Δβ можно упростить:
- для азимутальной плоскости Δα=θcosφ,
- для угломестной плоскости Δβ=θsinφ.
Несложный расчет показывает, что погрешность такой замены не превышает 1% даже при весьма большой ширине диаграммы направленности антенной системы, равной 20 град. Кроме того, основной интерес при сравнении заявляемого пеленгатора и прототипа представляет наиболее важный из точностных показателей [1], а именно - погрешность оценки малых, близких нулю отклонений ИРИ относительно РСН.
Сомножитель s(t) в (2) описывает временной процесс полезного сигнала на выходе любого отдельного канала приема МПУ

где РS - суммарная мощность полезного сигнала в полосе приема, связанная с мощностью Р0 соотношением PS=ηР0 (где η - коэффициент, характеризующий усилительные свойства МПУ, одинаковый для прототипа и заявляемого пеленгатора); М - число каналов приема (для прототипа М=4); ψ(t) - мгновенная фаза полезного сигнала.
В общем виде, распространяющимся как на прототип, так и на заявляемое устройство, информативная фаза ϕi(θ, φ) с учетом принятого допущения о небольших абсолютных значениях θ может быть представлена следующим образом:

где bi=cos(2πi/M-φ) - направляющий косинус ориентации i-й точки приема на плоскости пеленгования; µ=πd/λ, λ - длина волны, d - оговорено ранее.
Для прототипа (М=4) в азимутальной плоскости коэффициенты b0 равны: b0=1,
b2=-1, b1=b3=0; а в угломестной плоскости: b1=1, b3=-1, b0=b2=0.
С первого и третьего выходов многоканального МПУ принимаемые сигналы поступают соответственно на первый и второй входы первого ФСО для азимутальной плоскости, а со второго и четвертого выходов многоканального МПУ - соответственно на первый и второй входы второго ФСО для угломестной плоскости.
Каждый ФСО выполняет функцию комплексного перемножения входных сигналов с последующим выделением мнимой части. Такая операция эквивалентна фазовому детектированию при смещении фазы одного из входных сигналов на π/2 [5, с.162-172] или синусному фазовому детектированию, реализуемому фазовым дискриминатором [6, с.60-63].
Ввиду симметрии структуры прототипа по каждому из двух каналов пеленгования рассмотрим статистические свойства сигнала на выходе только одного из ФСО - например, в азимутальной плоскости, полагая при этом, что ИРИ находится в данной плоскости (φ=0). В результате синусного фазового детектирования в ФСО образуется сигнал оценки азимутального отклонения ИРИ относительно РСН

где kS - коэффициент передачи ФСО; uSS(θ, t), uSN(θ, t) и uNN(t) - составляющие выходного сигнала: "сигнал-сигнал", "сигнал-шум" и "шум-шум", первая из которых является полезной информативной, в две другие - независимыми между собой флюктуациями, вносящими погрешность оценки углового отклонения.
Для нахождения дисперсии σ2 флюктуационной погрешности одиночной (моноимпульсной) оценки углового отклонения воспользуемся известным [1] выражением:
σ2=D/ρ2 при θ=0,
где D - дисперсия флюктуации сигнала отклонения, ρ - крутизна преобразования угла θ в сигнал отклонения при θ=0.
Ввиду центрированного характера и независимости флюктуационных процессов uSN(Q,t) и uNN(t) на выходе ФСО величина D равна сумме их дисперсий D=D[uSN(0,t)]+D[uNN(t)]=DSN+DNN при θ=0, a математическое ожидание М[uα(θ, t)]=М[uSS(θ, t)] и, соответственно, крутизну преобразования ρ можно выразить следующим образом:
 ,
,
где D[…] и М[…] - операторы вычисления дисперсии и математического ожидания.
Рассматривая область малых углов θ в окрестности РСН, воспользуемся следующими приближениями: sinϕ0(θ)≅ϕ0(θ), sinϕ2(θ)≅ϕ2(θ),ϕ0(θ)≅µθ,ϕ2(θ)≅-µθ, которые раскрыты в соответствии с (4) и значениями коэффициентов b0 и b2. Тогда

Учитывая, что  для пеленгатора-прототипа, дифференцируя последнее выражение, получим
для пеленгатора-прототипа, дифференцируя последнее выражение, получим

Определим дисперсии флюктуации вида "сигнал-шум" DSN и "шум-шум" DNN сигнала отклонения (5) в окрестности РСН (θ≅0, x0(0, t)=…=x3(0, t)=s(t)) исходя из независимости флюктуационных процессов в каналах приема и равенства D[Im{ξi(t)}]=РN/2 в виде


Выражения (7)-(9) позволяют определить дисперсии составляющих погрешности оценки углового отклонения, которые вызваны флюктуациями вида соответственно "сигнал-шум" и "шум-шум"


где q=РS/РN - отношение “сигнал-шум” по мощности в полосе приема.
Дисперсия  суммарной флюктуационной погрешности одиночной (моноимпульсной) оценки углового отклонения ИРИ относительно РСН пеленгатора-прототипа в каждой плоскости пеленгования при этом равна
суммарной флюктуационной погрешности одиночной (моноимпульсной) оценки углового отклонения ИРИ относительно РСН пеленгатора-прототипа в каждой плоскости пеленгования при этом равна

Полученное выражение (12) описывает основной функциональный точностной показатель качества работы пеленгатора-прототипа и далее будет использоваться для сравнения с аналогичным показателем заявляемого пеленгатора с целью количественного подтверждения достигаемого технического результата изобретения.
Технический результат от использования изобретения заключается в повышении точности оценки углового отклонения ИРИ по азимуту и углу места относительно РСН в условиях малых отношений “сигнал-шум”.
Сущность изобретения заключается в том, что в моноимпульсный фазовый пеленгатор, содержащий так же, как и прототип, антенную систему, апертура которой состоит из отдельных непересекающихся и примыкающих друг к другу областей антенных элементов равной эффективной площади, многоканальное моноимпульсное приемное устройство, первый и второй формирователи сигнала отклонения, первые входы которых соединены соответственно с первым и вторым выходами многоканального моноимпульсного приемного устройства, в отличие от прототипа введены первый и второй блоки преобразования координат и третий формирователь сигнала отклонения, первый вход которого соединен с третьим выходом многоканального моноимпульсного приемного устройства, а вторые входы первого, второго и третьего формирователей сигнала отклонения подключены соответственно ко второму, третьему и первому выходам многоканального моноимпульсного приемного устройства, первый, второй и третий входы первого и второго блоков преобразования координат соединены с выходами соответственно первого, второго и третьего формирователей сигнала отклонения, причем антенная система выполнена из трех областей антенных элементов, фазовые центры располагаются в вершинах равностороннего треугольника, а выходы первого и второго блоков преобразования координат являются соответствующими выходами заявляемого пеленгатора.
В известных моноимпульсных фазовых пеленгаторах не содержится признаков, сходных с признаками, отличающими заявляемый пеленгатор от прототипа. Наличие вновь введенных блоков и связей позволяет повысить точности оценок угловых отклонений ИРИ по азимуту и углу места относительно РСН в условиях малых отношений “сигнал-шум”.
Известные пеленгаторы обладают низкой точностью оценки угловых отклонений по азимуту и углу места ИРИ в условиях малых отношений “сигнал-шум”, поскольку не реализуют потенциальных возможностей эффективной оценки угловых координат ИРИ в нижней части диапазона отношений “сигнал-шум”, т.е. в той области, где высокая точность оценки угловых координат имеет существенное практическое значение для реальных задач.
Известно, что радиолокационное взаимодействие характеризуется непостоянством и большим разбросом энергетических отношений “сигнал-шум” для различных условий работы, при этом возможны резкие падения мощности полезного сигнала, приводящие к нарушению процесса устойчивого, точного и надежного измерения угловых координат ИРИ. В этих условиях очевидную значимость для качества работы радиолокационной системы в целом имеют точностные характеристики моноимпульсного фазового пеленгатора именно в области малых отношений “сигнал-шум”.
Проведенные исследования показывают, что при полном учете пространственной структуры информативного сигнала, поступающего от ИРИ, и изначально пространственно двумерном подходе к задаче построения моноимпульсного фазового пеленгатора возможно достижение лучших по сравнению с аналогами точностных показателей в области малых отношений “сигнал-шум”.
Повышение точности моноимпульсного фазового пеленгатора в области малых отношений “сигнал-шум” эквивалентно изменению его тактико-технических характеристик (ТТХ):
- увеличению дальности действия пеленгатора;
- уменьшению мощности пеленгуемого источника вторичного излучения;
- уменьшению излучаемой мощности источника, необходимой для устойчивой оценки угловых координат ИРИ пеленгатором;
- улучшению качества работы всей радиолокационной системы, включающей моноимпульсный фазовый пеленгатор, при энергетических флюктуациях полезного сигнала.
Технический результат от использования изобретения, заключающийся в повышении точности оценки углового отклонения ИРИ по азимуту и углу места относительно РСН в условиях малых отношений “сигнал-шум” определяется следующими причинами.
Во флюктуациях сигналов оценки углового отклонения ИРИ относительно РСН как заявляемого пеленгатора, так и его прототипа, можно выделить две составляющие, первая из которых обусловлена комбинационным процессом вида "сигнал-шум", а вторая - комбинационным процессом вида "шум-шум". Причина возникновения комбинационных флюктуаций связана с методом выделения оценок угловых отклонений ИРИ относительно РСН, основанном на нелинейной операции - перемножении принимаемых сигналов.
В области больших отношений “сигнал-шум” в флюктуациях выходных сигналов ФСО преобладает составляющая вида "сигнал-шум", а при близких или меньших единице отношениях “сигнал-шум” преобладает составляющая вида "шум-шум". Принципиальная разница между зависимостями дисперсий комбинационных процессов "сигнал-шум" и "шум-шум" от мощности шума состоит в том, что в первом случае эта зависимость линейная, во втором - квадратичная. Поэтому в условиях, когда при снижении отношения “сигнал-шум” начинает доминировать составляющая вида "шум-шум", происходит резкое повышение флюктуационной погрешности оценки угловых отклонений ИРИ относительно РСН. Таким образом, при определении точностных характеристик моноимпульсного фазового пеленгатора, которые ограничивают ТТХ, особое внимание следует уделять именно составляющей вида "шум-шум".
Флюктуационные погрешности оценок угловых координат, обусловленные комбинационными составляющими вида "сигнал-шум", для заявляемого пеленгатора и его прототипа равны между собой по среднеквадратическому значению, т.к. оба пеленгатора отвечают критерию оптимальности для области больших отношений “сигнал-шум”. Количественное обоснование данного равенства погрешностей, означающее равенство точности заявляемого пеленгатора и его прототипа в области больших отношений “сигнал-шум”, будет показано далее на основе статистического анализа характеристик сравниваемых пеленгаторов.
В области малых отношений “сигнал-шум”, когда существенно влияние комбинационной оставляющей вида "шум-шум", заявляемый пеленгатор обеспечивает примерно вдвое меньшую дисперсию флюктуационной погрешности оценки углового отклонения ИРИ относительно РСН по сравнению с прототипом.
Снижение флюктуационных погрешностей оценок, формируемых на выходах заявляемого пеленгатора, возникающих в силу влияния составляющей вида "шум-шум", основано на увеличении числа одновременно используемых оценок углового отклонения ИРИ относительно РСН по различным осям для вычисления соответствующих отклонений по азимуту и по углу места.
В заявляемом пеленгаторе одновременно формируются три оценки углового отклонения ИРИ относительно РСН в трех плоскостях, смещенных относительно друг друга на угол 120 град., в отличие от прототипа, где одновременно формируются только две такие оценки, соответствующие каждой из двух ортогональных плоскостей.
Флюктуационные погрешности трех оценок угловых отклонений ИРИ относительно РСН в заявляемом пеленгаторе зависимы между собой, но степень их взаимной зависимости уменьшается при снижении отношения “сигнал-шум”. Связано это с тем, что данные флюктуационные погрешности содержат как коррелированные между тремя каналами пеленгования составляющие вида "сигнал-шум", так и некоррелированные - вида "шум-шум", при этом удельный вес данных некоррелированных составляющих тем больше, чем ниже отношение “сигнал-шум”. Увеличение удельного веса некоррелированных составляющих вида "шум-шум" при уменьшении отношения “сигнал-шум” влечет за собой снижение уровня взаимной межканальной корреляции флюктуационных составляющих и, соответственно, уменьшение суммарной дисперсии флюктуационной погрешности оценки отклонения ИРИ относительно РСН по сравнению с прототипом.
Несмотря на коррелированность флюктуационных погрешностей в области больших отношений “сигнал-шум”, заявляемый пеленгатор и его прототип обеспечивают равную точность оценки углового отклонения ИРИ относительно РСН в данной области отношений “сигнал-шум”, что будет показано далее при описании заявляемого пеленгатора.
Подробное обоснование технического результата изобретения, а также его количественное выражение, приводится при описании заявляемого моноимпульсного фазового пеленгатора.
На фиг.1 приведена функциональная схема прототипа заявляемого моноимпульсного фазового пеленгатора, где:
А - антенная система;
МПУ - многоканальное моноимпульсное приемное устройство;
ФСO1 и ФСO2 - первый и второй формирователи сигналов отклонения.
На фиг.2 показано расположение фазовых центров антенных приемных каналов на апертуре антенной системы для прототипа заявляемого моноимпульсного фазового пеленгатора.
На фиг.3 приведена функциональная схема предлагаемого моноимпульсного фазового пеленгатора, где:
1 - антенная система (А);
2 - многоканальное моноимпульсное приемное устройство (МПУ);
3.1, 3.2, 3.3 - первый, второй и третий формирователи сигналов отклонения (ФСО);
4.1, 4.2 - блоки преобразования координат (БПК) в азимутальную и угломестную плоскости соответственно.
На фиг.4 показано расположение фазовых центров антенных приемных каналов на апертуре антенной системы для заявляемого моноимпульсного фазового пеленгатора.
На фиг.5 приведена структурная схема многоканального МПУ 2, где:
5.1, 5.2, 5.3 - смесители (CM);
6.1, 6.2, 6.3 - усилители промежуточной частоты (УПЧ);
7 - гетеродин (Г);
8 - блок автоматической регулировки усиления (АРУ).
На фиг.6 приведена структурная схема первого ФСО 3.1, где:
9 - перемножитель (П);
10 - фазовращатель (ФВ) на π/2;
11 - фильтр низких частот (ФНЧ).
На фиг.7 приведена структурная схема первого БПК 4.1, где:
12.1, 12.2, 12.3 - масштабирующие блоки (МБ);
13 - сумматор (С).
На фиг.8 приведен график зависимости отношения дисперсий оценок углового отклонения ИРИ относительно РСН для заявляемого пеленгатора и прототипа, иллюстрирующий количественное выражение технического результата изобретения.
Предлагаемый моноимпульсный фазовый пеленгатор (фиг.3) содержит антенную систему (А) 1, многоканальное моноимпульсное приемное устройство (МПУ) 2, первый, второй и третий входы которого подключены соответственно к первому, второму и третьему выходам антенной системы; первый 3.1, второй 3.2 и третий 3.3 формирователи сигнала отклонения (ФСО) 3, первые входы каждого из которых соединены соответственно с первым, вторым и третьим выходами МПУ 2, а вторые входы - соответственно со вторым, третьим и первым выходами МПУ 2; первый 4.1 и второй 4.2 блоки преобразования координат (БПК) 4, первый, второй и третий входы каждого из которых подключены к выходам соответствующих ФСО 3, причем выходы первого и второго БПК 4 являются соответствующими выходами заявляемого пеленгатора.
Предлагаемый моноимпульсный фазовый пеленгатор работает следующим образом.
При описании работы заявляемого пеленгатора будем исходить из тождественных прототипу энергетических и метрических условий пеленгования ИРИ. Это означает, что неизменными остаются поступающий от ИРИ поток мощности П, эффективная площадь антенной системы А, чувствительность каналов приема МПУ 2 и диаметр окружности d, на которой расположены точки приема, соответствующие фазовым центрам каждой из отдельных парциальных апертур раскрыва антенной системы 1.
Плоскость раскрыва (апертура) антенной системы 1 заявляемого пеленгатора пространственно разделена на три отдельные непересекающиеся и примыкающие друг к другу области антенных элементов, т.е. на три парциальные апертуры, эффективные площади которых равны между собой, а каждая из них составляет треть суммарной эффективной площади антенной системы 1 - А/3. Каждую такую область, выполненную в виде антенных элементов фазированной антенной решетки, соответствующей диаграммообразующей схемой, или выполненную в виде параболических зеркальных антенн с облучателями, можно привести к одной точке на плоскости пеленгования, соответствующей ее фазовому центру.
Каждая из трех парциальных апертур формирует в пространстве парциальные диаграммы направленности с равным коэффициентом направленного действия, фазовые центры которых располагаются в фазовых центрах каждой из трех отдельных парциальных апертур. В заявляемом моноимпульсном фазовом пеленгаторе используются три точки приема с номерами 0, 1 и 2, совпадающих с фазовыми центрами трех парциальных апертур антенной системы, геометрическое положение которых на плоскости пеленгования  иллюстрирует фиг.4. При этом за счет соответствующей геометрии расположения трех парциальных апертур антенной системы фазовые центры располагаются в вершинах равностороннего треугольника, центр тяжести которого совпадает с началом координат плоскостей пеленгования, причем одна из сторон треугольника параллельна азимутальной плоскости.
иллюстрирует фиг.4. При этом за счет соответствующей геометрии расположения трех парциальных апертур антенной системы фазовые центры располагаются в вершинах равностороннего треугольника, центр тяжести которого совпадает с началом координат плоскостей пеленгования, причем одна из сторон треугольника параллельна азимутальной плоскости.
Парциальные диаграммы направленности антенной системы попарно формируют три пересекающиеся равносигнальные плоскости (плоскости синфазного приема по двум соседним парциальным диаграммам направленности), одна из которых совпадает с угломестной плоскостью, а каждая из двух других образуют с угломестной плоскостью двугранный угол, равный 60 град., и они повернуты симметрично в противоположные стороны относительно угломестной плоскости. Три равносигнальные плоскости при пересечении образуют, в случае идеального конструктивного исполнения антенной системы, одно равносигнальное направление антенной системы.
Номера точек приема 0, 1 и 2 (фиг.4) соответствуют первому, второму и третьему каналам приема, т.е. сигнал от i-й точки приема обрабатывается в (i+1)-м канале приема (с номерами 1, 2 и 3). Поток мощности П разделяется на три равные части (М=3) ввиду равенства эффективной площади каждой парциальной апертуры А/3 и, таким образом, мощность полезного сигнала для каждого канала приема равна АП/3=Р0/3.
Информативные фазы ϕi(θ,ϕ) описываются общим для заявляемого пеленгатора и прототипа выражением (4), с той разницей, что i=0,1,2, а направляющие косинусы 6, конкретизируются относительно М=3:

С первого, второго и третьего выходов антенной системы 1 три принимаемых сигнала от нулевой, первой и второй точек приема поступают соответственно на первый, второй и третий входы трехканального МПУ 2, где они, также как и в прототипе, усиливаются, проходят согласованную частотно-временную обработку и нормируются автоматической регулировкой усиления, действующей относительно суммарного сигнала всех трех приемных каналов. Таким образом, сигнал на (i+1)-м выходе МПУ 2 может быть представлен в аналогичном прототипу виде (1).
Реализация многоканального МПУ 2 для заявляемого пеленгатора не имеет специфики, отличающей его от известных типовых схем, используемых в моноимпульсной радиолокации [4].
В качестве примера на фиг.5 раскрыта одна из возможных структур линейного трехканального МПУ 2, каждый канал которого состоит из трех цепей последовательно соединенных смесителя (СМ) 5 и усилителя промежуточной частоты (УПЧ) 6, а также общих гетеродина (Г) 7 и блока автоматической регулировки усиления (АРУ) 8. На вторые (опорные) входы каждого из трех смесителей СМ 5.1, 5.2 и 5.3 подается сигнал гетеродина Г 7 для переноса обрабатываемых сигналов на промежуточную частоту. На вторые (управляющие) входы каждого из трех УПЧ 6.1, 6.2 и 6.3 подается сигнал управления усилением УПЧ 6 от блока АРУ 8, который формируется на основе суммирования выходных сигналов всех трех УПЧ 6.1-6.3, поступающих на три входа блока АРУ 8.
Блок АРУ 8, формирующий сигнал для моноимпульсной нормировки в каждом канале приема, также является типовым, а способы его реализации подробно изложены в ряде литературных источников, например [1-4].
Выходные сигналы, соответствующие первому, второму и третьему выходам многоканального МПУ 2, поступают на первые входы соответствующих по номеру ФСО 3.1, 3.2 и 3.3, на вторые входы которых подаются выходные сигналы соответственно со второго, третьего и первого выходов МПУ 2. Таким образом, два входных сигнала (i+1)-го ФСО 3 соответствуют двум точкам приема:
- точке с номером i,
- следующей за ней точке (по направлению против часовой стрелки, см. фиг.4) с номером m=(i+1)mod3.
Как и в прототипе, ФСО 3 выполняют функцию комплексного перемножения входных сигналов с последующим выделением мнимой части, что эквивалентно фазовому детектированию при смещении фазы одного из входных сигналов на π/2 [5, с.162-172] или синусному фазовому детектированию, реализуемому фазовым дискриминатором [6, с.60-63].
Каждый ФСО, в том числе и ФСО 3, может быть реализован в соответствии со структурной схемой, приведенной на фиг.6 (нумерация элементов соответствует первому ФСО 3.1). Эта схема содержит перемножитель входных сигналов (П) 9; при этом сигнал, поступающий на его второй вход, смещается по фазе на π/2 в фазовращателе (ФВ) 10. С выхода перемножителя П 9 сигнал поступает на вход фильтра низких частот (ФНЧ) 11 для подавления высокочастотных составляющих и, после соответствующей обработки, - на выход ФСО 3.1.
На выходах каждого из трех ФСО 3.1, 3.2 и 3.3 формируются сигналы углового отклонения в плоскостях, перпендикулярных плоскости пеленгования и проходящих соответственно через пары точек приема: 0-1; 1-2 и 2-0 (фиг.4).
Для равенства динамических характеристик заявляемого пеленгатора и прототипа необходимы одинаковые постоянные времени сглаживания сигналов моноимпульсных (единичных) оценок углового отклонения на выходах ФСО 3. Это достигается идентичностью передаточных функций ФНЧ 11, входящих в ФСО 3, для заявляемого пеленгатора и прототипа. Выбор постоянной времени сглаживания определяется динамикой изменения пространственного положения ИРИ [1, 2, 6].
Результат синусного фазового детектирования, проводимого в каждом из ФСО 3.1-3.3, описывается следующим образом:

Выходные сигналы первого 3.1, второго 3.2 и третьего 3.3 ФСО поступают на соответствующие входы первого 4.1 и второго 4.2 блоков преобразования координат (БПК) 4, где осуществляется их пересчет в оценки углового отклонения ИРИ относительно РСН в азимутальной и угломестной плоскостях. В первом 4.1 и втором 4.2 БПК 4 одновременно реализуются весовые суммирования трех входных сигналов с коэффициентами сαi - для азимутальной и cβi - для угломестной плоскостей.
Пример структурной схемы одного из БПК 4 (азимутального 4.1 - в соответствии с нумерацией элементов) приведен на фиг.7. Эта схема содержит первый 12.1, второй 12.2 и третий 12.3 масштабирующие блоки (МБ), выходы каждого из которых подключены к соответствующим входам сумматора (С) 13. Выходы первого 4.1 и второго 4.2 БПК 4 являются соответствующими выходами заявляемого устройства, сигналы которых представляют собой оценки угловых отклонений ИРИ соответственно по азимуту и углу места относительно равносигнального (опорного) направления антенны.
Коэффициенты сi азимутального 4.1 и угломестного 4.2 БПК 4 различаются между собой, кроме того, их значения обеспечивают равенство коэффициентов передачи по угловым отклонениям ИРИ относительно РСН для заявляемого пеленгатора и прототипа. Расчет значений коэффициентов сi для каждой плоскости приведен далее в описании работы заявляемого моноимпульсного фазового пеленгатора.
Сигнал, формируемый одним из каналов БПК 4, представим, как и ранее, в виде суммы составляющих

По аналогии с прототипом рассмотрим составляющие вида "сигнал-шум" и "шум-шум" флюктуационной погрешности одиночного (моноимпульсного) измерения, которые характеризуются дисперсиями  и
и  . Для их нахождения определим величины ρ, DSN и DNN в окрестности равносигнального направления, используя приближения sinϕi(θ)≅ϕi(θ), ϕi(θ)≅µbiθ.
. Для их нахождения определим величины ρ, DSN и DNN в окрестности равносигнального направления, используя приближения sinϕi(θ)≅ϕi(θ), ϕi(θ)≅µbiθ.
Исходя из выражений (2), (13)-(15) и учитывая равенство 
в случае заявляемого пеленгатора, для математического ожидания выходного сигнала одного канала БПК при малых θ запишем
Предварительно зададим коэффициенты сi, полагая сi=bi-bm (что обеспечивает согласованность весовой обработки трех принимаемых сигналов по долготе).
Вводя величину  и дифференцируя (16) по θ, получим при θ=0
и дифференцируя (16) по θ, получим при θ=0

Дисперсию DNN определим, исходя из равенства D[Im{ξi(t)}]=PN/2 и независимости процессов ξi(t) между каналами приема.
Раскрывая uNN(t) с помощью (14) и (15), запишем
Найти дисперсию DSN сложнее, поскольку флюктуации вида "сигнал-шум" на выходах трех ФСО зависимы между собой.
Для произвольного θ искомая дисперсия имеет вид

а при θ=0 и сведении шести слагаемых к сумме трех случайных процессов получим

Выражая в (20) коэффициенты сi через bi, на основе выражения (13) проведем замену 
тогда
Исходя из (17), (18) и (21), можно определить дисперсии составляющих флюктуационной погрешности оценки углового отклонения  и
и  с точностью до коэффициента С.
с точностью до коэффициента С.
Значение С после раскрытия величин bi по выражению (13) равно  при любом φ. С учетом полученного значения С дисперсии составляющих флюктуационной погрешности оценки углового отклонения определяются выражениями
при любом φ. С учетом полученного значения С дисперсии составляющих флюктуационной погрешности оценки углового отклонения определяются выражениями



где  - суммарная дисперсия флюктуационной погрешности оценки углового отклонения ИРИ относительно РСН для заявляемого моноимпульсного фазового пеленгатора в одной плоскости.
- суммарная дисперсия флюктуационной погрешности оценки углового отклонения ИРИ относительно РСН для заявляемого моноимпульсного фазового пеленгатора в одной плоскости.
Сравнивая три последних выражения с аналогичными выражениями (10)-(12) для пеленгатора-прототипа, нетрудно видеть, что дисперсия  в обоих случаях одинакова, а дисперсия
в обоих случаях одинакова, а дисперсия  стала меньше в два раза. Это двукратное уменьшение дисперсии флюктуационной составляющей вида "шум-шум" определяет преимущество заявляемого моноимпульсного фазового пеленгатора, проявляющееся, как следует из сравнения (12) с (24), наиболее сильно в области малых отношений “сигнал-шум”.
стала меньше в два раза. Это двукратное уменьшение дисперсии флюктуационной составляющей вида "шум-шум" определяет преимущество заявляемого моноимпульсного фазового пеленгатора, проявляющееся, как следует из сравнения (12) с (24), наиболее сильно в области малых отношений “сигнал-шум”.
Важность снижения флюктуационной погрешности в области малых отношений “сигнал-шум” связана с тем, что именно здесь флюктуационная погрешность измерения доминирует над всеми другими видами погрешностей, ограничивая точность измерения пеленгов и соответствующие ТТХ моноимпульсного фазового пеленгатора.
Проведем расчет весовых коэффициентов сi, используемых в БПК 4.1 и 4.2.
Для обеспечения равной пеленгационной чувствительности по угловому отклонению от РСН для заявляемого пеленгатора и прототипа будем использовать единые значения величин kS, kA, η и µ. Наряду с этим, как следует из (17) и (7), в крутизне ρ для заявляемого пеленгатора и для прототипа наблюдается различие в 2С/3=3 раза в силу предварительно проведенного выбора коэффициентов сi.
Это означает, что коэффициент С должен быть уменьшен в 3 раза, а поскольку  коэффициенты сi следует умножить на
коэффициенты сi следует умножить на  относительно предварительно введенных, т.е.
относительно предварительно введенных, т.е. 
Кроме того, коэффициенты сi определяют плоскость, для которой формируется сигнал углового отклонения ИРИ относительно РСН, в качестве весовых коэффициентов двух БПК 4.1 и 4.2 соответственно для азимутального cαi и угломестного cβi каналов. При этом сα0, сα1 и сα2 являются коэффициентами передачи блоков МБ 12.1, 12.2 и 12.3, входящих в БПК 4.1, а величины cβ0, cβ1 и cβ2 - соответственно БПК 4.2.
Исходя из приведенных выше соображений и уточненного общего выражения  , раскрывая bi в соответствии с (13) при φ=0 для азимутальной плоскости (для коэффициентов cαi) и при φ=π/2 для угломестной плоскости (для коэффициентов сβi), можно записать
, раскрывая bi в соответствии с (13) при φ=0 для азимутальной плоскости (для коэффициентов cαi) и при φ=π/2 для угломестной плоскости (для коэффициентов сβi), можно записать
Численные значения коэффициентов cαi и cβi будут соответственно равны:
 ;
;  ;
;  ; cβ0=0; cβ1=0,5; сβ2=-0,5.
; cβ0=0; cβ1=0,5; сβ2=-0,5.
Для количественного описания технического результата рассмотрим отношение дисперсий погрешности оценки углового отклонения ИРИ по азимуту (либо по углу места) относительно РСН  для заявляемого моноимпульсного фазового пеленгатора и прототипа. Из (12) и (24) следует, что отношение дисперсий определяется выражением
для заявляемого моноимпульсного фазового пеленгатора и прототипа. Из (12) и (24) следует, что отношение дисперсий определяется выражением
Представляя полученное отношение (26) графически (фиг.8), можно увидеть ту область отношений “сигнал-шум”, в которой заявляемый моноимпульсный фазовый пеленгатор обладает преимуществом в точности оценки углового отклонения ИРИ по азимуту и углу места относительно РСН по сравнению с прототипом, - область малых отношений “сигнал-шум”, меньших трех-пяти (по амплитуде). Следует подчеркнуть, что именно в области малых отношений “сигнал-шум” снижение флюктуационной погрешности определения угловых координат имеет наибольшее практическое значение, поскольку здесь флюктуационная погрешность становится основным фактором, ограничивающим эффективность моноимпульсного фазового пеленгатора и ТТХ радиолокационной системы в целом.
Таким образом, достигаемый технический результат от использования предлагаемого моноимпульсного фазового пеленгатора, в отличие от прототипа, заключается в повышении точности оценки углового отклонения ИРИ по азимуту и углу места относительно РСН в условиях малых отношений “сигнал-шум” и, соответственно, в повышении точности определения пеленга на ИРИ.
Реализация устройства не вызывает практических трудностей, так как вновь вводимые блоки представляют собой завершенные функциональные узлы, выполняемые на основе известных и широко распространенных радиотехнических элементов, выпускаемых отечественной промышленностью.
ЛИТЕРАТУРА
1. Вопросы статистической теории радиолокации./В 2-х т. Под ред. Г.П.Тартаковского. М.: Сов. радио, т.1, 1963; т.2, 1964.
2. Теоретические основы радиолокации./Под ред. В.Е.Дулевича. М.: Сов. радио, 1978.
3. Сколник М. Введение в технику радиолокационных систем. М.: Мир, 1965. - Прототип.
4. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: Радио и связь, 1984.
5. Евсиков Ю.А., Чапурский В.В. Преобразование случайных процессов в радиотехнических устройствах. М.: Высшая школа, 1977.
6. Радиоавтоматика./Под ред. В.А.Бесекерского. М.: Высшая школа, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| МОНОИМПУЛЬСНОЕ ФАЗОВОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПО НАПРАВЛЕНИЮ | 2007 |
|
RU2344434C1 |
| Пеленгатор источника радиоизлучения с широкоугольным коническим сканированием | 2016 |
|
RU2616597C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПРИЕМНЫХ ДИАГРАММ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ АНТЕННОЙ СИСТЕМЫ И МОНОИМПУЛЬСНАЯ АНТЕННАЯ СИСТЕМА | 2006 |
|
RU2316860C1 |
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ УГЛОВЫХ КООРДИНАТ РАДИОСИГНАЛА В АМПЛИТУДНЫХ МОНОИМПУЛЬСНЫХ ПЕЛЕНГАЦИОННЫХ СИСТЕМАХ | 2016 |
|
RU2625349C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ | 2011 |
|
RU2455658C1 |
Изобретение относится к области радиолокации и предназначено для определения пеленга на локационный объект, являющийся источником радиоизлучения (ИРИ) или отражения радиоволн, одновременно в двух плоскостях - по азимуту и углу места. Пеленгатор содержит антенную систему, апертура которой состоит из отдельных непересекающихся и примыкающих друг к другу областей антенных элементов равной эффективной площади, многоканальное моноимпульсное приемное устройство, первый, второй и третий формирователи сигнала отклонения, первый и второй блоки преобразования координат, причем антенная система выполнена из трех областей антенных элементов, фазовые центры располагаются в вершинах равностороннего треугольника. Достигаемый технический результат - повышение точности оценки углового отклонения ИРИ по азимуту и углу места относительно равносигнального направления в условиях малых отношений “сигнал-шум”. 8 ил.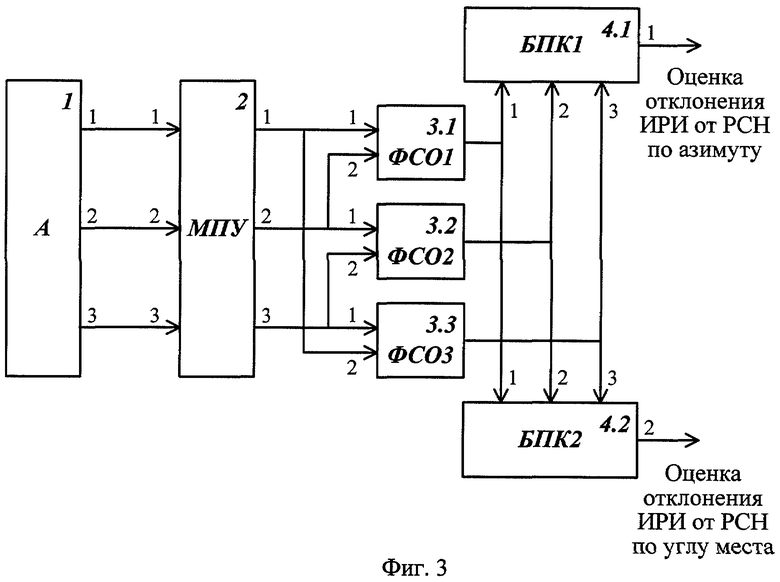
Моноимпульсный фазовый пеленгатор, содержащий антенную систему, апертура которой состоит из отдельных непересекающихся и примыкающих друг к другу областей антенных элементов равной эффективной площади, многоканальное моноимпульсное приемное устройство, первый, второй и третий входы которого подключены соответственно к первому, второму и третьему выходам антенной системы, первый и второй формирователи сигнала отклонения, первые входы которых соединены соответственно с первым и вторым выходами многоканального моноимпульсного приемного устройства, отличающийся тем, что в него введены первый и второй блоки преобразования координат и третий формирователь сигнала отклонения, первый вход которого соединен с третьим выходом многоканального моноимпульсного приемного устройства, а вторые входы первого, второго и третьего формирователей сигнала отклонения подключены соответственно ко второму, третьему и первому выходам многоканального моноимпульсного приемного устройства, первый, второй и третий входы первого и второго блоков преобразования координат соединены с выходами соответственно первого, второго и третьего формирователей сигнала отклонения, причем антенная система выполнена из трех областей антенных элементов, фазовые центры располагаются в вершинах равностороннего треугольника, а выходы первого и второго блоков преобразования координат являются соответствующими выходами заявляемого пеленгатора, при этом первый, второй и третий формирователи сигнала отклонения предназначены для выполнения функции комплексного перемножения входных сигналов с последующим выделением мнимой части и формированием соответствующих сигналов углового отклонения в плоскостях, перпендикулярных плоскости пеленгования, а первый и второй блоки преобразования координат предназначены для пересчета координат в оценки углового отклонения источника радиоизлучения относительно равносигнального направления в азимутальной и угломестной плоскостях.
| СКОЛНИК М | |||
| Введение в технику радиолокационных систем | |||
| - М.: Мир, 1965, с.235, рис.5.13 | |||
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2297645C1 |
| Паровой котел с непосредственным воздействием пламени на воду | 1928 |
|
SU24884A1 |
| УСТРОЙСТВО ДЛЯ МОНОИМПУЛЬСНОГО ИЗМЕРЕНИЯ ПЕЛЕНГА ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 2004 |
|
RU2287839C2 |
| US 4225870, 30.09.1980 | |||
| ЕР 1012623 А1, 28.06.2000 | |||
| US 6087974 А, 11.07.2000. | |||

