Изобретение относится к области радиолокационной техники и может использоваться для проведения адаптивной компенсации воздействующих по боковым лепесткам диаграммы направленности суммарного и разностных каналов моноимпульсного амплитудного суммарно-разностного пеленгатора естественных и искусственных помех.
Известен способ моноимпульсного суммарно-разностного пеленгования [Справочник по радиолокации под ред. М.Сколника, т.4. М.: Сов. Радио, 1978, стр.16-21], заключающийся в приеме сигналов трехканальной моноимпульсной системой, содержащей суммарный и два разностных канала, переносе входных сигналов каждого канала на промежуточную частоту, усилении сигналов суммарного и разностных каналов с использованием общей системы автоматической регулировки усиления с целью обеспечения независимости сигналов суммарного и разностных каналов от уровня входного сигнала и фазовом детектировании сигналов разностных каналов при использовании в качестве опорных сигнала суммарного канала. На выходе фазовых детекторов формируются сигналы ошибки по разностным каналам, величина и знак которых определяет смещение цели от равносигнального направления.
Недостатком рассматриваемого способа моноимпульсного амплитудного суммарно-разностного пеленгования является его низкая помехозащищенность в отношении помех, воздействующих по боковым лепесткам диаграммы направленности суммарного и разностных каналов, приводящих к появлению систематических ошибок пеленгации, уровень которых зависит от отношения "сигнал/шум" и "помеха/шум" на входе пеленгатора и уровня диаграмм направленности каналов в направлении источников помех [Быков В.В., Бродский С.В. Овчинников Г.Н. Точность и устойчивость углового сопровождения цели при воздействии многоточечных помех на моноимпульсные РЛС по дальним боковым лепесткам диаграммы направленности антенны, Радиотехника, №10, 2000 г.].
Известен способ совместного формирования лучей в суммарной и разностных диаграммах направленности моноимпульсных антенных решеток [пат. РФ 2120161, МПК H01Q 3/26, 1998 г.], основанный на взвешивании сигналов, принятых каждым излучателем, их разделении на два канала, суммировании сигналов, полученных с одноименных выходов делителей с соответственно прогрессивным нарастающим и убывающим фазовым сдвигом, обеспечивающим отклонение каждого луча по обобщенной координате на ±ΔU, где ΔU - расстояние максимумов лучей до равносигнального направления, и последующем образовании суммарной и разностной диаграмм направленности. Весовые коэффициенты сигналов, принятых каждым излучателем, выбирают равным алгебраической сумме весовых коэффициентов для данного излучателя, обеспечивающих формирование основной диаграммы направленности с максимумом, ориентированным в направлении Uo, и четырех диаграмм направленности, компенсирующих каждую помеху, действующую с направления Uп, из которых две диаграммы направленности ориентированы соответственно в направлениях (Uп+ΔU) и (Uп-ΔU), а другие две диаграммы направленности им зеркально симметричны относительно равносигнального направления и ориентированы соответственно в направлениях (2Uo-Uп-ΔU) и (2Uo-Uп+ΔU), причем веса симметричных пар компенсирующих диаграмм направленности выбирают одинаковыми. При этом достигается практически полное исключение искажений пеленгационной характеристики измерителя. Недостатком способа является необходимость наличия априорной информации о направлении воздействия помехи, что, как правило, не выполняется на практике.
Известны адаптивные способы и реализующие их устройства компенсации помех, исключающие возможность искажения формы диаграммы направленности при приеме полезного сигнала, а также частичное его подавление. В этих системах используются методы ограничения по углу, которые можно разделить на три группы.
К первой группе относятся способы и реализующие их устройства компенсации, в которых ограничения на форму диаграммы направленности вводятся с использованием пилот-сигналов [Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. - М.: Радио и связь, 1986, стр.226-228]. В рамках указанных способов требуется иметь большой динамический диапазон элементов системы компенсации, а также фильтрация пилот-сигналов на выходе, что является существенными недостатками способов данной группы.
Ко второй группе относятся способы и реализующие их устройства компенсации, использующие для защиты главного лепестка диаграммы направленности "предварительную" (до адаптивного процессора) пространственную фильтрацию [Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. - М.: Радио и связь, 1986, стр.228-230; патент РФ 2013833, H01Q 25/02, H01Q 21/00, 1994 г.]. Указанные методы обеспечивают снижение влияния полезного сигнала на формирование результирующей диаграммы направленности в достаточно узкой пространственной области относительно ожидаемого направления прихода полезного сигнала и имеют высокую чувствительность к аппаратным ошибкам реализации [Jablon N.K. Adaptive beamforming with the generalized sidelobe canceller in the presence of array imperfections IEEE Trans. Antennas and Propag. 1986. Vol.34, №8. p.996-1012].
К третьей группе относятся способы и реализующие их устройства компенсации, использующие ограничения, вводимые непосредственно в контур управления с помощью пространственно-матричного фильтра [Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. - М.: Радио и связь, 1986, стр.163-165, 231-237]. Вводимые ограничения на форму результирующей диаграммы направленности располагают в опорном и двух симметричных относительно опорного направлениях [Манжос В.Н., Кокин В.Н., Белов А.А., Камчатный Н.И. "Изв. Вузов. Радиоэлектроника". 1987, т.30, №9, с.7].
Наиболее близким к предлагаемому способу (прототипом) является способ компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании, реализуемый при использовании моноимпульсного пеленгатора в составе цифровой радиолокационной головки самонаведения [Вексин С.И. Компенсация помех по боковым лепесткам в доплеровских головках самонаведения. Радиотехника, №9, 2002 г., стр.76…86; Вексин С.И. Обработка радиолокационных сигналов в доплеровских головках самонаведения. Издательство МАИ, 2005, стр.221-224]. Его реализация состоит в следующем.
Полезные (пеленгуемые) сигналы и помехи принимают основной антенной системой и антеннами компенсационных каналов, усиливают, переносят (при необходимости) на промежуточную частоту и осуществляют согласованную внутриимпульсную обработку в идентичных приемных каналах. После согласованной обработки сигналы суммарного  , разностных по азимуту
, разностных по азимуту  и углу места
и углу места  и компенсационных
и компенсационных  каналов поступают на аналого-цифровые преобразователи, где подвергаются преобразованию в цифровую форму. Выборку цифровых отсчетов сигналов обрабатывают в устройстве формирования результирующих сигналов и вычисления пеленгов путем последовательной реализации следующих операций:
каналов поступают на аналого-цифровые преобразователи, где подвергаются преобразованию в цифровую форму. Выборку цифровых отсчетов сигналов обрабатывают в устройстве формирования результирующих сигналов и вычисления пеленгов путем последовательной реализации следующих операций:
1.1) формируют ковариационную матрицу принимаемых компенсационными каналами сигналов с элементами  путем попарного перемножения сигналов, принимаемых различными компенсационными антеннами, и усреднения полученных результатов за заданный интервал времени;
путем попарного перемножения сигналов, принимаемых различными компенсационными антеннами, и усреднения полученных результатов за заданный интервал времени;
1.2) вычисляют вектора ковариаций сигналов суммарного, разностных и компенсационных каналов с элементами  ;
;
1.3) вычисляют вектора весовых коэффициентов суммарного и разностных каналов
 ;
;
1.4) проводят весовое суммирование сигналов суммарного и компенсационных и разностных и компенсационных каналов
Полученные компенсированные сигналы суммарного и разностных каналов используют для вычисления оценок угловых координат пеленгуемого сигнала по формулам [Леонов А.И, Фомичев К.И. Моноимпульсная радиолокация. М.: Сов. радио, 1970, стр 22-26]
 ;
; ,
,
где µα(β) - крутизна пеленгационной характеристики по каналу азимута и угла места соответственно;  - среднее значение квадрата амплитуды сигнала суммарного канала за заданный интервал времени усреднения.
- среднее значение квадрата амплитуды сигнала суммарного канала за заданный интервал времени усреднения.
Недостатками прототипа являются низкая точность пеленгования в случае формирования ковариационной матрицы помех компенсационных каналов и вектор-столбцов ковариаций сигналов суммарного, разностных и компенсационных каналов по выборке, содержащей наряду с помехами полезный пеленгуемый сигнал, смещения нулей и изменения крутизны пеленгационных характеристик в азимутальной и угломестной плоскостях, представляющих собой зависимости математических ожиданий оценки угловых положений полезного сигнала на выходе пеленгатора в двух плоскостях пеленгации от угловых отклонений источника полезного сигнала от направления максимума суммарного канала (равносигнального направления), при формировании ковариационной матрицы помех по выборке, содержащей только помехи при их воздействии с отдельных направлений. В случае формирования ковариационной матрицы помех по выборке, содержащей кроме помех полезный пеленгуемый сигнал, "провал" в результирующей диаграмме направленности суммарного и разностных каналов будет сформирован не только в направлении помех, но и самого полезного сигнала, в результате чего в измерителе будет утеряна полезная информация о его угловых координатах. Во втором случае формирование провалов в результирующей диаграмме направленности разностных каналов может привести к смещению их нулей, а суммарного канала - к изменению его уровня, что в свою очередь приведет к изменению условий нормировки при вычислении угловых координат при реализации суммарно-разностной обработки и изменению крутизны пеленгационной характеристики.
Техническим результатом изобретения является повышение точности пеленгации за счет компенсации воздействующих по боковым лепесткам суммарного и разностных каналов пеленгатора помех и за счет сохранения положений нулей и величин крутизны пеленгационных характеристик.
Указанный результат достигается тем, что в способе компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании, заключающемся в приеме сигналов антенной системой с суммарным (с номером j=1), разностным по азимуту (с номером j=2) и разностным по углу места (с номером j=3) и антеннами q=1, 2,…, Q компенсационных каналов, согласованной обработке сигналов каждого канала с использованием Q+3 идентичных приемных каналов, аналого-цифровом преобразовании сигналов каждого приемного канала и обработке оцифрованных сигналов каждого приемного канала в устройстве формирования результирующих сигналов и вычисления пеленгов с вычислением векторов весовых коэффициентов суммарного и разностных каналов и взвешенном суммировании сигналов суммарного и компенсационных, разностного по азимуту и компенсационных, разностного по углу места и компенсационных каналов, для вычисления векторов весовых коэффициентов предварительно формируют матрицы ограничений на форму результирующей диаграммы направленности суммарного, разностного по азимуту и разностного по углу места каналов для всех возможных направлений наблюдения в виде отсчетов значений диаграмм направленности суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов в r=1, 2,…, R точках ограничений, при этом при нечетном числе точек ограничений одну из них располагают в заданном направлении наблюдения, а остальные точки ограничения располагают симметрично относительно нее и плоскостей пеленгации, при четном числе точек ограничений их положения располагают симметрично относительно направления наблюдения и плоскостей пеленгации, отклонения точек ограничений от направления наблюдения выбирают, исходя из минимума среднеквадратического смещения оценки угловых координат пеленгуемого сигнала для ожидаемых распределений значений угловых координат направлений прихода и мощностей пеленгуемого сигнала и помех, запоминают матрицы ограничений в устройстве памяти матриц ограничений, а при обработке оцифрованных сигналов каждого канала формируют ковариационные матрицы суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов, считывают значения матриц ограничений суммарного, разностного по азимуту и разностного по углу места каналов для текущего направления наблюдения из устройства памяти матриц ограничений, а векторы весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов формируют с учетом матриц ограничений в соответствии с выражением
 ,
,
где Фj - ковариационная матрица принимаемых сигналов для j-го канала;
 - матрица ограничений для j-го канала;
- матрица ограничений для j-го канала;
 - вектор-столбец ограничений для j-го канала, образуемый из значений первой строки матрицы Cj;
- вектор-столбец ограничений для j-го канала, образуемый из значений первой строки матрицы Cj;  ;
;  - отсчеты значений диаграмм направленности j-го суммарного или разностного и q-го компенсационного каналов в точках ограничений; «+» - знак эрмитова сопряжения.
- отсчеты значений диаграмм направленности j-го суммарного или разностного и q-го компенсационного каналов в точках ограничений; «+» - знак эрмитова сопряжения.
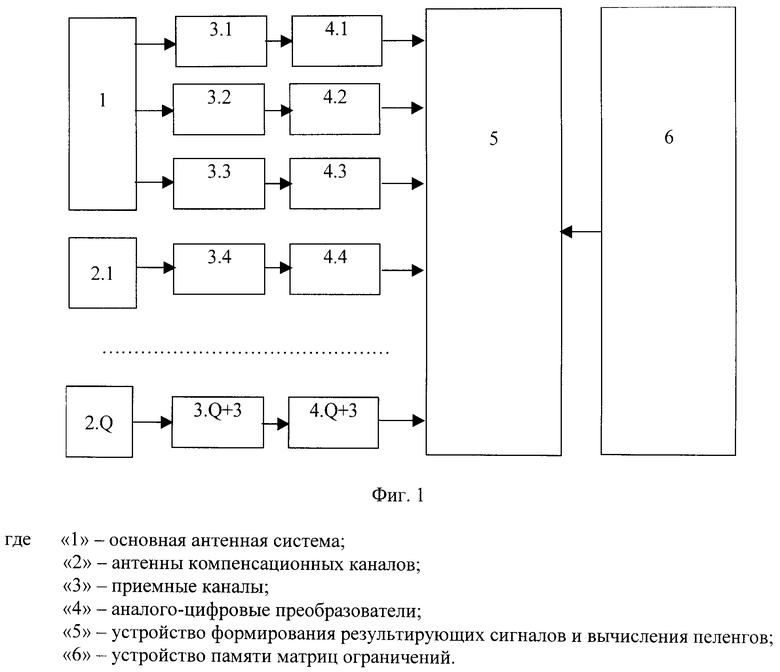
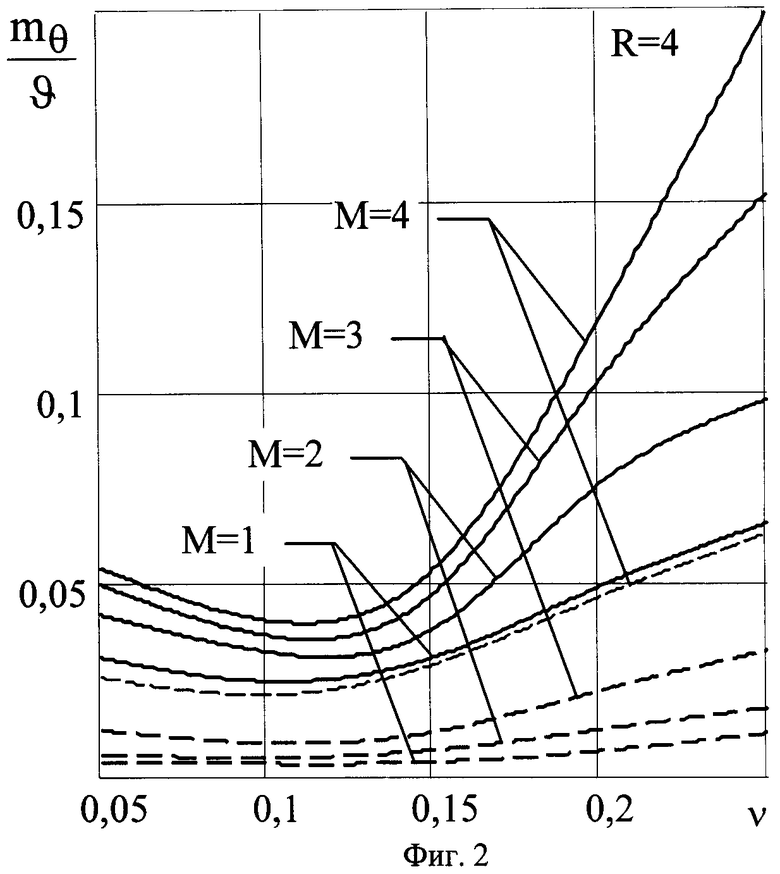
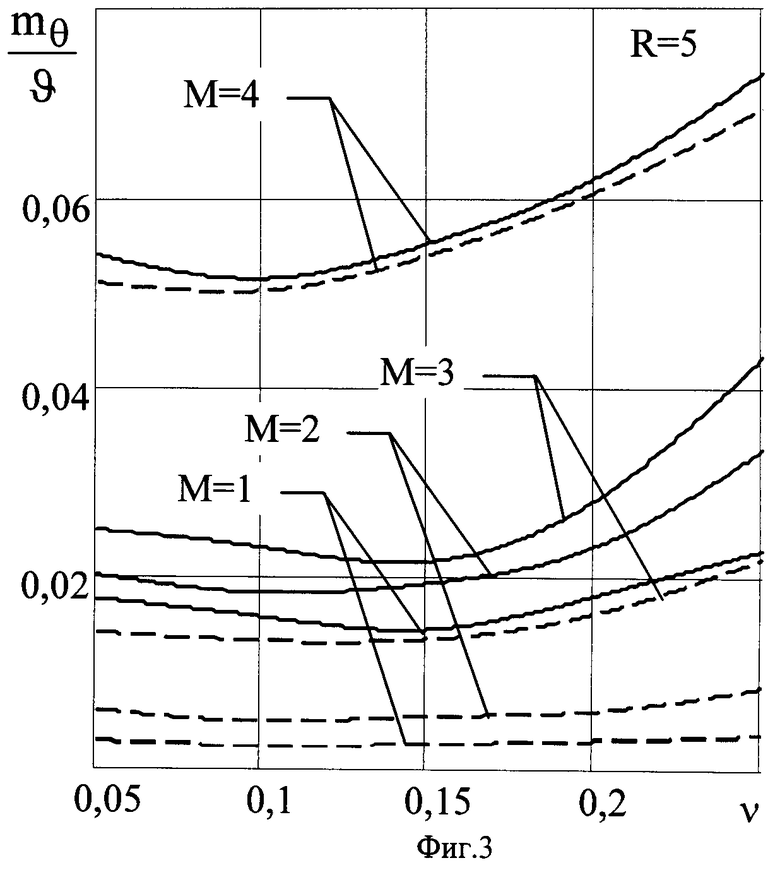
На фиг.1 приведена структурная схема устройства, реализующего заявляемый способ. На фиг.2, 3 приведены результаты расчетов среднеквадратического значения смещения оценки угловых координат, нормированного к ширине главного лепестка суммарного канала, от нормированного к ширине главного лепестка суммарного канала отклонения ограничений от направления наблюдения при числе ограничений R=4 и R=5 соответственно.
Устройство, реализующее заявляемый способ (фиг.1), содержит основную моноимпульсную антенную систему 1 и q=1, 2,…, Q антенн 2.1…2.Q компенсационных каналов, выходы которых подключены к Q+3 последовательно соединенным идентичным приемным каналам 3.1…3.Q+3 и аналого-цифровым преобразователям 4.1…4.Q+3, выходы которых подключены к сигнальным входам устройства формирования результирующих сигналов и вычисления пеленгов 5, устройство памяти матриц ограничений 6, подключенное к информационным входам устройства формирования результирующих сигналов и вычисления пеленгов 5.
Реализация заявляемого способа адаптивной пространственной компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании состоит в следующем.
Предварительно (при настройке и калибровке пеленгатора) для всех возможных s=1, 2,…, S направлений наблюдения (угловых направлений механического или электронного ориентирования максимума главного лепестка суммарного канала основной моноимпульсной антенной системы 1) с угловыми координатами (αs,βs) в блоке 6 формируют матрицы ограничений  на форму результирующей диаграммы направленности суммарного, разностного по азимуту и разностного по углу места каналов вида
на форму результирующей диаграммы направленности суммарного, разностного по азимуту и разностного по углу места каналов вида
представляющие собой отсчеты значений диаграмм направленности суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов в r=1, 2,…, R точках ограничений, отстоящих по азимуту и углу места от направления наблюдения (αs, βs) на  и запоминают их в устройстве памяти матриц ограничений 6.
и запоминают их в устройстве памяти матриц ограничений 6.
Полезные (пеленгуемые) сигналы и помехи принимают основной антенной системой 1 и антеннами компенсационных каналов 2.1…2.Q, осуществляют согласованную внутриимпульсную обработку в идентичных приемных каналах 3.1…3.Q+3. После согласованной обработки сигналы суммарного  , разностных по азимуту
, разностных по азимуту  и углу места
и углу места  и компенсационных
и компенсационных  каналов поступают на аналого-цифровые преобразователи 4.1…4.Q+3, где подвергаются преобразованию в цифровую форму. Выборку цифровых отсчетов сигналов обрабатывают в устройстве формирования результирующих сигналов и вычисления пеленгов 5 путем последовательной реализации следующих операций:
каналов поступают на аналого-цифровые преобразователи 4.1…4.Q+3, где подвергаются преобразованию в цифровую форму. Выборку цифровых отсчетов сигналов обрабатывают в устройстве формирования результирующих сигналов и вычисления пеленгов 5 путем последовательной реализации следующих операций:
2.1) вычисляют ковариационные матрицы помех суммарного и разностных каналов с элементами  ;
;  ;
;  ;
;
2.2) считывают значения матриц ограничений суммарного, разностного по азимуту и разностного по углу места каналов для текущего направления наблюдения (αS, βS) вида
из устройства памяти матриц ограничений 6;
2.3) вычисляют вектора весовых коэффициентов суммарного и разностных каналов
 ,
,
где  - вектор-столбец ограничений для j-го канала, образуемый из значений первой строки матрицы Cj;
- вектор-столбец ограничений для j-го канала, образуемый из значений первой строки матрицы Cj;
2.4) проводят весовое суммирование сигналов суммарного и компенсационных и разностных и компенсационных каналов
 .
.
Полученные компенсированные сигналы суммарного и разностных каналов используют для вычисления оценок угловых координат аналогично прототипу.
Благодаря тому, что векторы весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов для текущего направления наблюдения формируются с учетом записанных в блоке памяти матриц ограничений, элементы которой удовлетворяют системам уравнений (j=l,2,3)
 ,
,
исключается подавление полезных сигналов при их приходе с угловых направлений, соответствующих точкам ограничений и близких к ним [Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. М.: Радио и связь, 1986, стр.123; Фрост. Алгоритм линейно-ограниченной обработки сигналов в адаптивной решетке. ТИИЭР, т.60, №8, 1972, стр.5-16]. Кроме того, расположение точек ограничений выбирается из условия минимума среднеквадратического значения смещения оценки угловых координат пеленгуемого сигнала в заданной пространственной области
 ,
,
где
 - среднеквадратическое значение смещения оценки угловых координат пеленгуемого сигнала;
- среднеквадратическое значение смещения оценки угловых координат пеленгуемого сигнала;  - угол между векторами математического ожидания
- угол между векторами математического ожидания  оценки и истинным (α0,β0) значением пространственных координат пеленгуемого сигнала;
оценки и истинным (α0,β0) значением пространственных координат пеленгуемого сигнала;  ,
,  - законы распределения пространственно-энергетических параметров полезного сигнала и помех соответственно.
- законы распределения пространственно-энергетических параметров полезного сигнала и помех соответственно.
С учетом того, что введение ограничений приводит к снижению числа степеней свободы системы компенсации с Q+1 до Q+1-R, рациональное число ограничений выбирают минимальным, R=4, 5. Большее число ограничений (R=7, 9 и т.д.) может быть использовано при повышенных требованиях к точности измерения с учетом возможностей по аппаратурной реализации устройства.
Симметричное расположение ограничений относительно плоскостей пеленгации и особенности их расположения при их четном или нечетном числе определяется необходимостью обеспечения симметрии пеленгационной характеристики измерителя.
Для предлагаемого устройства математические ожидания оценок азимута и угла места в одной сигнально-помеховой ситуации будут иметь вид
 ,
,
 ,
,
где  - компенсированная диаграмма направленности суммарного канала;
- компенсированная диаграмма направленности суммарного канала;  - исходная диаграмма направленности суммерного канала;
- исходная диаграмма направленности суммерного канала;  - компенсированная диаграмма направленности разностного по азимуту (углу места) канала;
- компенсированная диаграмма направленности разностного по азимуту (углу места) канала;  - исходная диаграмма направленности разностного по азимуту (углу места) канала; М - число источников полезных сигналов и помех;
- исходная диаграмма направленности разностного по азимуту (углу места) канала; М - число источников полезных сигналов и помех;  - угловые координаты полезных сигналов и помех,
- угловые координаты полезных сигналов и помех, 
 - отношения "сигнал (помеха)/внутренний шум" при приеме по максимуму диаграммы направленности суммарного канала; Pi - мощность полезного сигнала (источника помех) на выходе изотропного приемного элемента;
- отношения "сигнал (помеха)/внутренний шум" при приеме по максимуму диаграммы направленности суммарного канала; Pi - мощность полезного сигнала (источника помех) на выходе изотропного приемного элемента;  - мощность внутренних шумов приемных каналов пеленгатора.
- мощность внутренних шумов приемных каналов пеленгатора.
Проведем иллюстрацию выигрыша предлагаемого способа адаптивной пространственной компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании по точности пеленгации в сравнении с прототипом и способом моноимпульсного амплитудного суммарно-разностного пеленгования без пространственной компенсации помех. На фиг.2, 3 приведены результаты расчетов среднеквадратического значения смещения оценки угловых координат  , нормированного к ширине главного лепестка суммарного канала, от параметра
, нормированного к ширине главного лепестка суммарного канала, от параметра  , где ϑα, ϑβ - значения ширины диаграммы направленности суммарного канала по азимуту и углу места соответственно;
, где ϑα, ϑβ - значения ширины диаграммы направленности суммарного канала по азимуту и углу места соответственно;  . Результаты приведены для реализации способа с использованием моноимпульсной основной антенной системы на базе квадратной антенной решетки из 21×21 элементов с межэлементным расстоянием λ/2, где λ - длина волны, Q=8 компенсационных антенн с квадратными апертурами размером
. Результаты приведены для реализации способа с использованием моноимпульсной основной антенной системы на базе квадратной антенной решетки из 21×21 элементов с межэлементным расстоянием λ/2, где λ - длина волны, Q=8 компенсационных антенн с квадратными апертурами размером  каждая располагались симметрично относительно плоскостей пеленгации по краям основной антенной системы. Число источников помех варьировалось в пределах М=1…4. Отношения полезный сигнал/шум и помеха/шум при их приеме полезного сигнала и помех по максимуму диаграммы направленности принимались равными
каждая располагались симметрично относительно плоскостей пеленгации по краям основной антенной системы. Число источников помех варьировалось в пределах М=1…4. Отношения полезный сигнал/шум и помеха/шум при их приеме полезного сигнала и помех по максимуму диаграммы направленности принимались равными  ;
;  ;
;  . Направление прихода полезного сигнала считалось распределенным равновероятно в пределах полуширины диаграммы направленности суммарного канала по азимуту и углу места, направление прихода помех - равновероятным в пределах ±(1…5) от ширины диаграммы направленности суммарного канала. Ковариационная матрица помех формировалась с учетом полезного (пеленгуемого) сигнала (сплошные кривые, неклассифицированная выборка) и без учета полезного сигнала (пунктирные кривые, классифицированная выборка). Фиг.2 соответствует случаю использования R=4 ограничений, фиг.3 - случаю использования R=5 ограничений.
. Направление прихода полезного сигнала считалось распределенным равновероятно в пределах полуширины диаграммы направленности суммарного канала по азимуту и углу места, направление прихода помех - равновероятным в пределах ±(1…5) от ширины диаграммы направленности суммарного канала. Ковариационная матрица помех формировалась с учетом полезного (пеленгуемого) сигнала (сплошные кривые, неклассифицированная выборка) и без учета полезного сигнала (пунктирные кривые, классифицированная выборка). Фиг.2 соответствует случаю использования R=4 ограничений, фиг.3 - случаю использования R=5 ограничений.
Как следует из результатов расчетов, оптимальное расположение ограничений соответствует величине ν=0,1…0,15, причем в заданных пространственно-энергетических ситуациях способ моноимпульсного амплитудного суммарно-разностного пеленгования без пространственной компенсации помех является полностью неработоспособным, то есть ошибки определения координат могут существенно превосходить ширину диаграммы направленности в каждой из плоскостей пеленгации, а прототип неработоспособен при неклассифицированной выборке. При классифицированной выборке для прототипа нормированные среднеквадратические значения смещений оценок угловых координат в типовых сигнально-помеховых ситуациях 5…10 раз превышают соответствующие величины для предлагаемого способа.
Предлагаемый способ является новым, поскольку из общедоступных сведений неизвестен способ адаптивной пространственной компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании, заключающийся в приеме сигналов основной антенной системой с суммарным, разностным по азимуту, разностным по углу места каналами, антеннами q=1, 2,…, Q компенсационных каналов, согласованной обработке сигналов каждого канала с использованием Q+3 идентичных приемных каналов, аналого-цифровом преобразовании сигналов каждого приемного канала и обработке оцифрованных сигналов каждого канала в устройстве формирования результирующих сигналов и вычисления пеленгов с вычислением векторов весовых коэффициентов суммарного и разностных каналов и весовом суммировании сигналов суммарного, разностных и компенсационных каналов, отличающийся тем, что для формирования векторов весовых коэффициентов каналов предварительно формируют матрицы ограничений на форму результирующей диаграммы направленности суммарного, разностного по азимуту и разностного по углу места каналов для всех возможных направлений наблюдения в виде отсчетов значений диаграмм направленности суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов в r=1, 2,…, R точках ограничений, причем при нечетном числе точек ограничений одну из них располагают в заданном направлении наблюдения, а остальные точки ограничения располагают симметрично относительно нее и плоскостей пеленгации, при четном числе точек ограничений их положения располагают симметрично относительно направления наблюдения и плоскостей пеленгации, отклонения точек ограничений от направления наблюдения выбирают исходя из минимума среднеквадратической ошибки смещения оценки угловых координат пеленгуемого сигнала для ожидаемых распределений значений угловых координат направлений прихода и мощностей пеленгуемого сигнала и помех, запоминают матрицы ограничений в устройстве памяти матриц ограничений, а при обработке оцифрованных сигналов каждого канала формируют ковариационные матрицы суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов, считывают значения матриц ограничений суммарного, разностного по азимуту и разностного по углу места каналов для текущего направления наблюдения из устройства памяти матриц ограничений и вычисляют векторы весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов с учетом ограничений на форму результирующей диаграммы направленности, задаваемую матрицами ограничений.
Предлагаемые технические решения имеют изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций - предварительное формирование и запоминание матриц ограничений, причем выбор числа и расположения точек ограничений проводится исходя из минимума среднеквадратического значения смещения оценки пеленгации для ожидаемых распределений угловых координат направлений прихода и мощностей полезного сигнала и помех, прием сигналов основной антенной с суммарным и разностным каналами и компенсационными антеннами, согласованная обработка сигналов в идентичных приемных каналах, аналого-цифровое преобразование сигналов, формирование вектора весовых коэффициентов суммарного и разностных каналов с учетом матриц ограничений для текущего направления наблюдения, взвешенное суммирование сигналов суммарного, разностного и компенсационных каналов, - обеспечивает адаптивную компенсацию помех со стабилизацией параметров (положений нулей разностных диаграмм и величины крутизны) пеленгационной характеристики измерителя и высокую точность пеленгации при наличии естественных и искусственных помех, воздействующих по боковым лепесткам диаграммы направленности суммарного и разностных каналов измерителя.
Предлагаемые технические решения практически применимы, так как для их реализации могут быть использованы серийно выпускаемые промышленностью антенные устройства, элементы приемных каналов, аналого-цифровые преобразователи, модули постоянных запоминающих устройств и процессоры цифровой обработки сигналов. Необходимые для реализации способа данные об уровнях диаграммы направленности суммарного, разностного и компенсационных каналов в точках ограничений в виде матрицы ограничений могут быть получены на этапе калибровки и настройки устройства, реализующего предлагаемый способ.
Технико-экономическая эффективность предложенного способа заключается в повышении точности пеленгации за счет компенсации воздействующих по боковым лепесткам суммарного и разностных каналов пеленгатора помех и за счет сохранения положений нулей и величин крутизны пеленгационных характеристик.
Изобретение относится к области радиолокационной техники и может использоваться для проведения адаптивной компенсации воздействующих по боковым лепесткам диаграммы направленности суммарного и разностных каналов моноимпульсного амплитудного суммарно-разностного пеленгатора естественных и преднамеренных помех при стабилизации параметров (исключении смещения нулей и изменении крутизны) его пеленгационной характеристики. Способ адаптивной пространственной компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании, заключающийся в приеме сигналов с текущего направления наблюдения с использованием антенной системы с суммарным (с номером j=1), разностным по азимуту (с номером j=2), разностным по углу места (с номером j=3) каналами и антенн q=1, 2,…, Q компенсационных каналов, согласованной обработке сигналов каждого канала с использованием Q+3 идентичных приемных каналов, аналого-цифровом преобразовании сигналов каждого приемного канала и обработке оцифрованных сигналов каждого канала в устройстве формирования результирующих сигналов и вычисления пеленгов путем вычисления векторов весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов и взвешенного суммирования сигналов суммарного и компенсационных, разностного по азимуту и компенсационных и разностного по углу места и компенсационных каналов, отличающийся тем, что для вычисления вектора весовых коэффициентов предварительно формируют матрицы ограничений на форму результирующей диаграммы направленности суммарного, разностного по азимуту и разностного по углу места каналов для всех возможных направлений наблюдения в виде отсчетов значений диаграмм направленности суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов в r=1, 2,…, R точках ограничений, причем при нечетном числе точек ограничений одну из них располагают в заданном направлении наблюдения, а остальные точки ограничения располагают симметрично относительно нее и плоскостей пеленгации, при четном числе точек ограничений их положения располагают симметрично относительно направления наблюдения и плоскостей пеленгации, отклонения точек ограничений от направления наблюдения выбирают исходя из минимума среднеквадратического значения смещения оценки угловых координат пеленгуемого сигнала для ожидаемых распределений значений угловых координат направлений прихода и мощностей пеленгуемого сигнала и помех, запоминают матрицы ограничений в устройстве памяти матриц ограничений, а при обработке оцифрованных сигналов каждого канала формируют ковариационные матрицы суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов, считывают значения матриц ограничений суммарного, разностного по азимуту и разностного по углу места каналов для текущего направления наблюдения из устройства памяти матриц ограничений, а векторы весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов формируют с учетом матриц ограничений в соответствии с определенным вычислительным выражением. Достигаемый технический результат - увеличение точности пеленгования. 3 ил.
Способ адаптивной пространственной компенсации помех при моноимпульсном амплитудном суммарно-разностном пеленговании, заключающийся в приеме сигналов с текущего направления наблюдения с использованием антенной системы с суммарным (с номером j=1), разностным по азимуту (с номером j=2), разностным по углу места (с номером j=3) каналами и антенн q=1, 2,…, Q компенсационных каналов, согласованной обработке сигналов каждого канала с использованием Q+3 идентичных приемных каналов, аналого-цифровом преобразовании сигналов каждого приемного канала и обработке оцифрованных сигналов каждого канала в устройстве формирования результирующих сигналов и вычисления пеленгов путем вычисления векторов весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов и взвешенного суммирования сигналов суммарного и компенсационных, разностного по азимуту и компенсационных и разностного по углу места и компенсационных каналов, отличающийся тем, что для вычисления вектора весовых коэффициентов предварительно формируют матрицы ограничений на форму результирующей диаграммы направленности суммарного, разностного по азимуту и разностного по углу места каналов для всех возможных направлений наблюдения в виде отсчетов значений диаграмм направленности суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов в r=1, 2,…, R точках ограничений, причем при нечетном числе точек ограничений одну из них располагают в заданном направлении наблюдения, а остальные точки ограничения располагают симметрично относительно нее и плоскостей пеленгации, при четном числе точек ограничений их положения располагают симметрично относительно направления наблюдения и плоскостей пеленгации, отклонения точек ограничений от направления наблюдения выбирают исходя из минимума среднеквадратического значения смещения оценки угловых координат пеленгуемого сигнала для ожидаемых распределений значений угловых координат направлений прихода и мощностей пеленгуемого сигнала и помех, запоминают матрицы ограничений в устройстве памяти матриц ограничений, а при обработке оцифрованных сигналов каждого канала формируют ковариационные матрицы суммарного, разностного по азимуту, разностного по углу места и компенсационных каналов, считывают значения матриц ограничений суммарного, разностного по азимуту и разностного по углу места каналов для текущего направления наблюдения из устройства памяти матриц ограничений, а векторы весовых коэффициентов суммарного, разностного по азимуту и разностного по углу места каналов формируют с учетом матриц ограничений в соответствии с выражением
,
где Фj - ковариационная матрица принимаемых сигналов для j-го канала;
- матрица ограничений для j-го канала;
- вектор-столбец ограничений для j-го канала, образуемый из значений первой строки матрицы Cj; ; - отсчеты значений диаграмм направленности j-го суммарного или разностного и q-го компенсационного каналов в точках ограничений; «+» - знак эрмитова сопряжения.
| ВЕКСИН С.И | |||
| Компенсация помех по боковым лепесткам в доплеровских головках самонаведения | |||
| - Радиотехника, 2001, №9, с.76-86 | |||
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ В МОНОИМПУЛЬСНЫХ ГОЛОВКАХ САМОНАВЕДЕНИЯ | 2006 |
|
RU2303806C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2297645C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПРИЕМНЫХ ДИАГРАММ НАПРАВЛЕННОСТИ МОНОИМПУЛЬСНОЙ АНТЕННОЙ СИСТЕМЫ И МОНОИМПУЛЬСНАЯ АНТЕННАЯ СИСТЕМА | 2006 |
|
RU2316860C1 |
| US 6867726 B1, 15.03/2005 | |||
| US 6118402 A, 12.09.2000 | |||
| US 5600326 A, 04.02.1997 | |||
| JP 2009162613 A, 23.07.2009 | |||
| WO 2000019230 A1, 06.04.2000. | |||

